Chaos in Motion: Measuring Visual Pollution with Tangential View Landscape Metrics


Abstract
:1. Introduction
1.1. Visual Pollution as Spatial Chaos
1.2. Visibility Metrics for Visual Pollution Assessment
1.3. Measuring Spatial Chaos
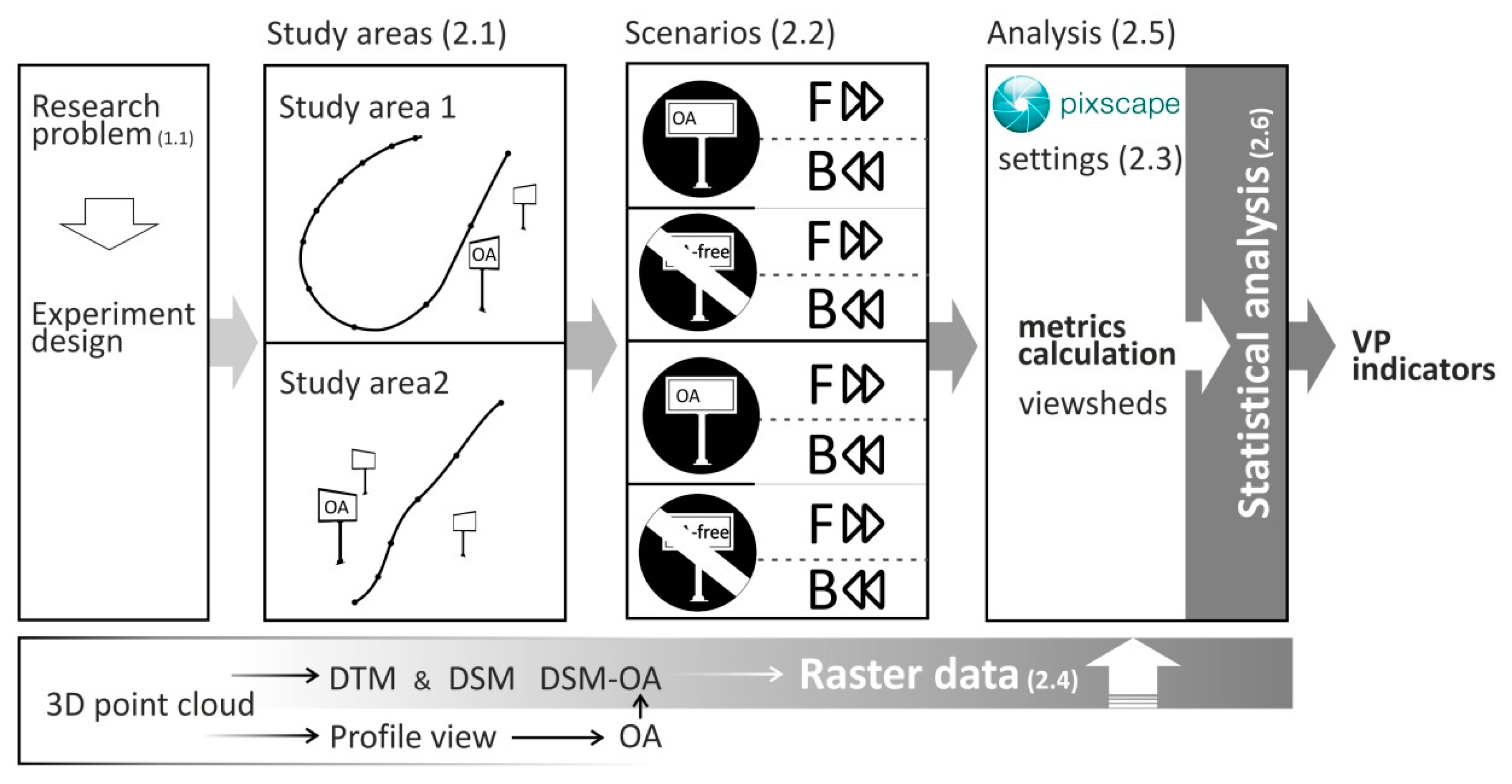
2. Study Area and Methods
2.1. Study Areas
2.2. Experimental Scenarios
2.3. Viewpoint Range Parameters
2.4. Digital Terrain Model (DTM) and Digital Surface Model (DSM) Rasters Processing Method (a 2.5D Landscape Model)
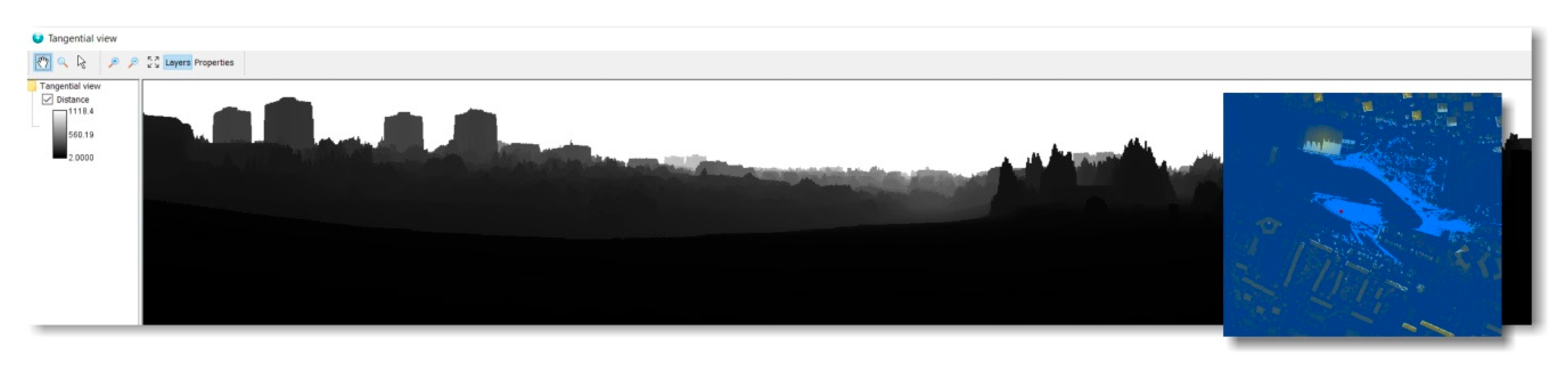
2.5. Tangential View Metrics Method
2.6. Spatial and Statistical Analysis Methods
3. Results
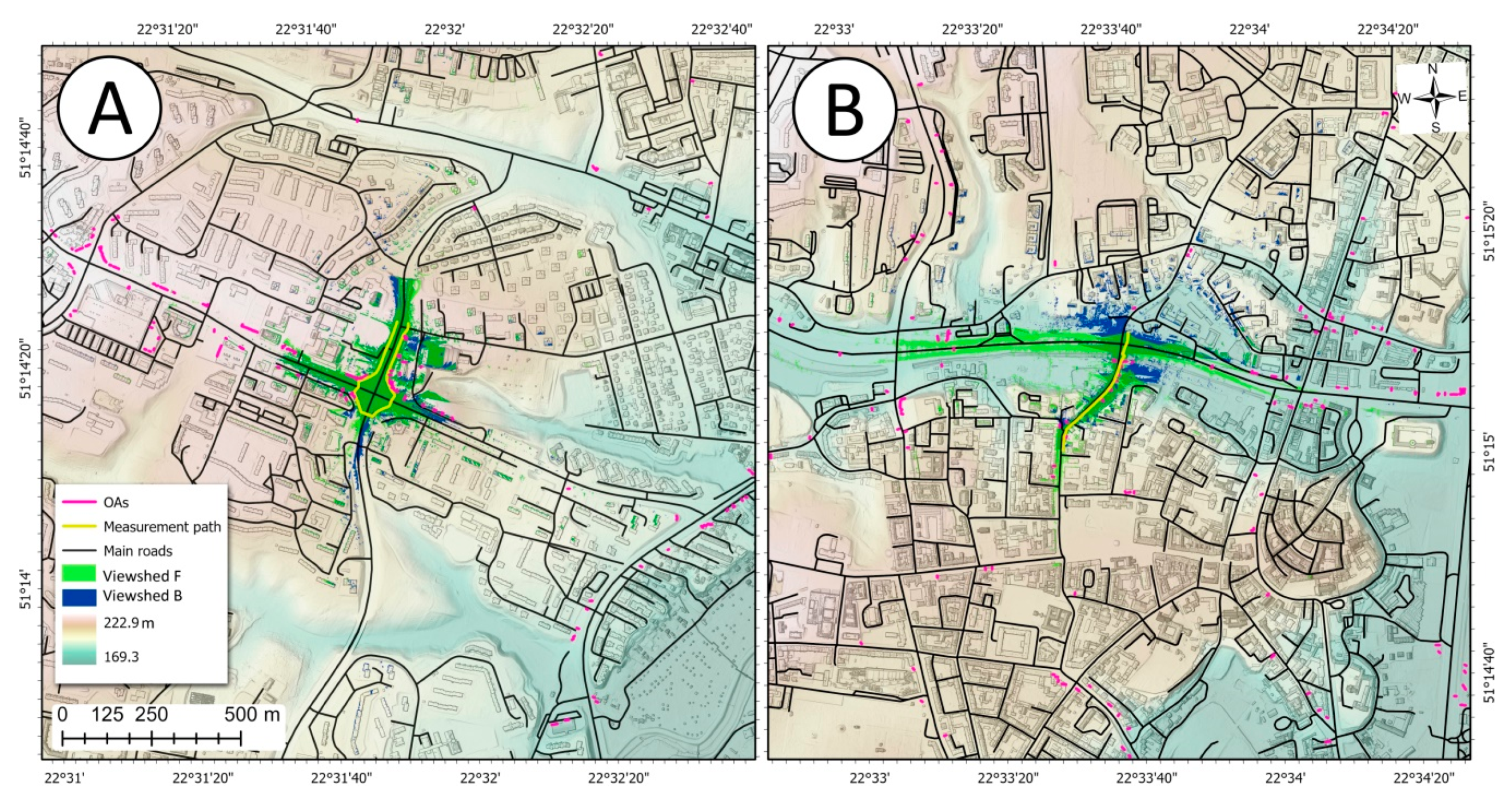
3.1. Outdoor Advertisements and the Visibility Obstruction Effect.
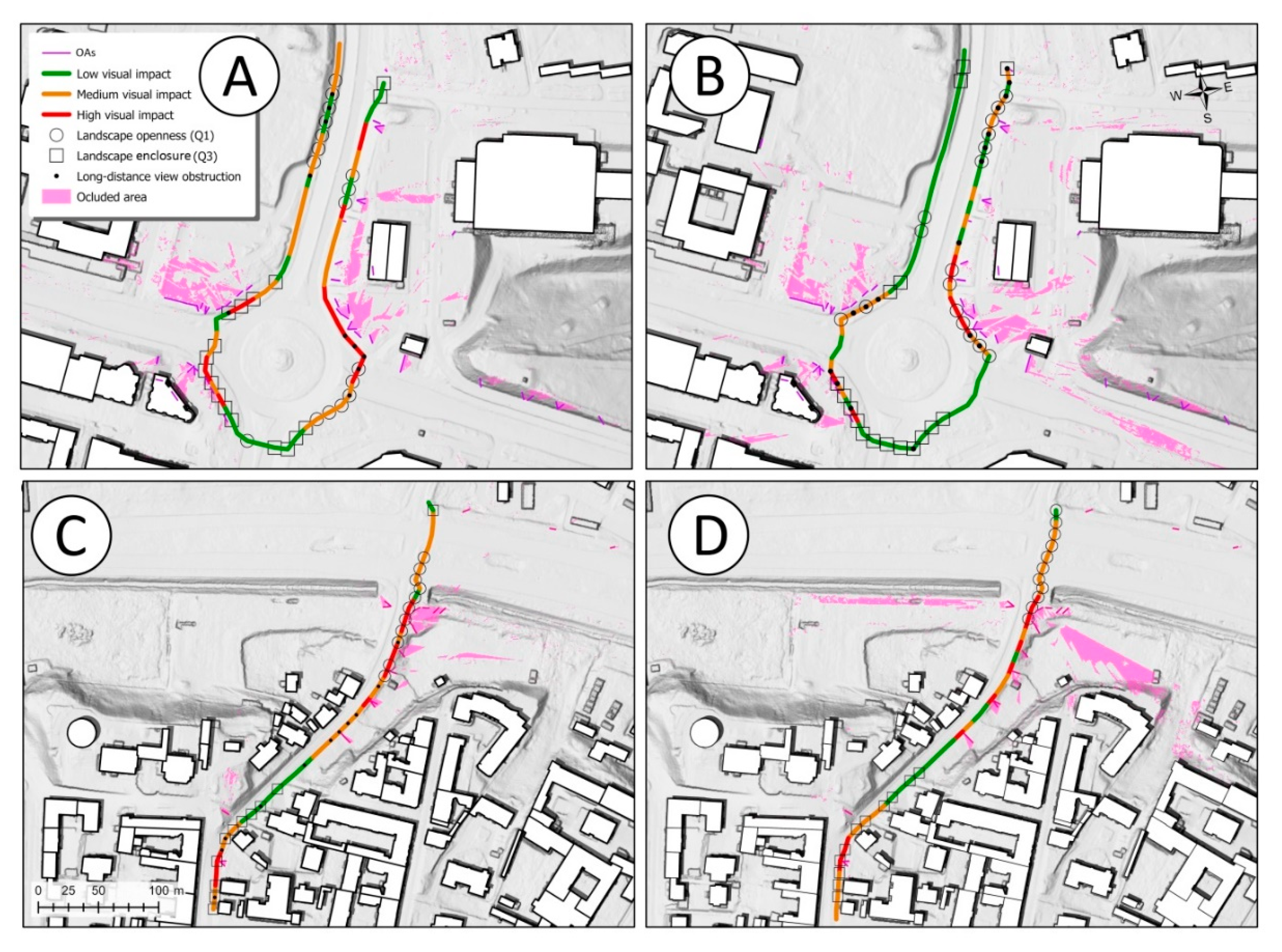
3.2. Landscape Openness/Enclosure
3.3. Tangential View Metrics
3.3.1. Area Metrics
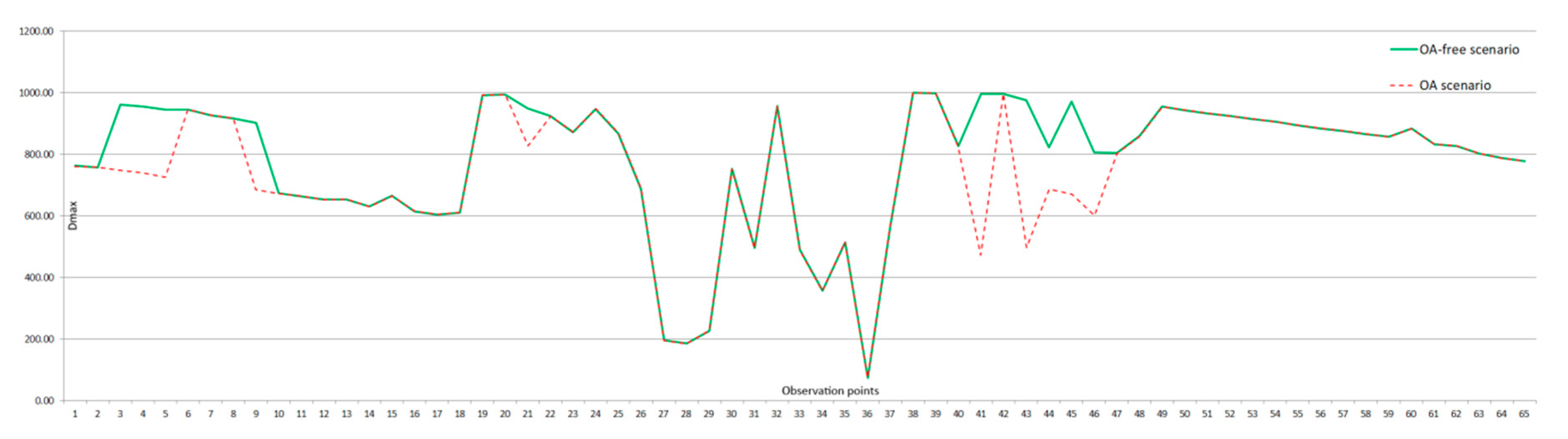
3.3.2. Dmax Metrics
3.3.3. The SL Metric
3.3.4. The SD and DL Metrics
4. Discussion
5. Conclusions
Funding
Conflicts of Interest
References
- Maslow, A.H.A. Theory of Human Motivation. Psychol. Rev. 1943, 50, 370–396. [Google Scholar] [CrossRef] [Green Version]
- McDermid, C.D. How money motivates men. Bus. Horiz. 1960, 3, 93–100. [Google Scholar] [CrossRef]
- Desmet, P.; Fokkinga, S. Beyond Maslow’s Pyramid: Introducing a Typology of Thirteen Fundamental Needs for Human-Cantered Design. Multimodal Technol. Interact. 2020, 4, 38. [Google Scholar] [CrossRef]
- Voronych, Y. Visual pollution of urban space in Lviv. Space Form. 2013, 20, 309–314. [Google Scholar]
- Szczepańska, M.; Wilkaniec, A.; Škamlová, L. Visual pollution in natural and landscape protected areas: Case studies from Poland and Slovakia. Quaest. Geogr. 2019, 38, 133–149. [Google Scholar] [CrossRef] [Green Version]
- Hasna, R.A.; Ajeeb, M.K. The Design of 3D Billboards Advertising in Jeddah, Saudi Arabia. Intern. Des. J. 2020, 10, 191–199. Available online: https://digitalcommons.aaru.edu.jo/faa-design/vol10/iss2/15 (accessed on 10 November 2020).
- Śleszyński, P.; Kowalewski, A.; Markowski, T.; Legutko-Kobus, P.; Nowak, M. The Contemporary Economic Costs of Spatial Chaos: Evidence from Poland. Land 2020, 9, 214. [Google Scholar] [CrossRef]
- Fry, G.; Tveit, M.S.; Ode, Å.; Velarde, M.D. The ecology of visual landscapes: Exploring the conceptual common ground of visual and ecological landscape indicators. Ecol. Indic. 2009, 9, 933–947. [Google Scholar] [CrossRef]
- Robert, S. Assessing the visual landscape potential of coastal territories for spatial planning. A case study in the French Mediterranean. Land Use Policy 2018, 72, 138–151. [Google Scholar] [CrossRef]
- Uuemaa, E.; Antrop, M.; Roosaare, J.; Marja, R.; Mander, Ü. Landscape metrics and indices: An overview of their use in landscape research. Living Rev. Landsc. Res. 2009. [Google Scholar] [CrossRef]
- Portella, A. Visual Pollution: Advertising, Signage and Environmental Quality; Ashgate Publishing: Farnham, UK, 2014. [Google Scholar]
- Boştină-Bratu, B.; Negoescu, A.G.; Palea, L. Consumer Acceptance of Outdoor Advertising: A Study of Three Cities. Land Forces Acad. Rev. 2018, 23. [Google Scholar] [CrossRef] [Green Version]
- Kamičaitytė-Virbašienė, J.; Godienė, G.; Kavoliūnas, G. Methodology of Visual Pollution Assessment for Natural Landscapes. J. Sustain. Archit. Civ. Eng. 2016, 13. [Google Scholar] [CrossRef] [Green Version]
- Drigo, M.O. Cidade/Invisibilidade e Cidade/Estranhamento: São Paulo Antes e Depois da lei “Cidade Limpa”. Galáxia 2009, 17, 49–64. Available online: https://revistas.pucsp.br/galaxia/article/view/2097 (accessed on 20 October 2020).
- Gomez, J.E.A. The Billboardization of Metro Manila. Int. J. Urban Reg. Res. 2013, 37, 186–214. [Google Scholar] [CrossRef]
- Tajuddin, S.N.A.A.; Zulkepli, N. An investigation of the use of language, social identity and multicultural values for nation-building in Malaysian outdoor advertising. Soc. Sci. 2019, 8, 18. [Google Scholar] [CrossRef] [Green Version]
- Motamed, B.; Farahani, L.; Jamei, E. Investigating the issue of pollution in the micro-scale design of mega- cities: A case study of Enghelab Street, Tehran. Manag. Res. Pract. 2015, 7, 43–59. [Google Scholar]
- Allahyari, H.; Salehi, E.; Zebardast, L. Evaluation of Visual Pollution in Urban Squares Using SWOT, AHP, and QSPM Techniques (Case Study: Tehran Squares of Enghelab and Vanak). J. Pollut. 2017, 3, 655–667. [Google Scholar]
- Karami, S.; Taleai, M. An Innovative Three-Dimensional Approach for Visibility Assessment of Highway Signs Based on the Simulation of Traffic Flow. J. Spat. Sci. 2020, 1–15. [Google Scholar] [CrossRef]
- Dymna, E.; Rutkiewicz, M. Polish Outdoor; Klucze Press: Warsaw, Poland, 2009. [Google Scholar]
- Madleňák, R.; Hudák, M. Analysis of data needs and having for the integrated urban freight transport management system. Commun. Comput. Inf. Sci. 2016, 40, 135–148. [Google Scholar] [CrossRef]
- Płuciennik, M.; Heldak, M. Outdoor Advertising in Public Space and its Legal System in Poland over the Centuries. IOP Conf. Ser. Mater. Sci. Eng. 2019, 471. [Google Scholar] [CrossRef]
- Chmielewski, S.; Lee, D.; Tompalski, P.; Chmielewski, T.J.; Wężyk, P. Measuring visual pollution by outdoor advertisements in an urban street using intervisibilty analysis and public surveys. Int. J. Geogr. Inf. Sci. 2016, 30, 801–818. [Google Scholar] [CrossRef]
- Chmielewski, S.; Samulowska, M.; Lupa, M.; Lee, D.; Zagajewski, B. Citizen science and WebGIS for outdoor advertisement visual pollution assessment. Comput. Environ. Urban Syst. 2018, 67, 97–109. [Google Scholar] [CrossRef]
- Chalkias, C.; Petrakis, M.; Psiloglou, B.; Lianou, M. Modelling of light pollution in suburban areas using remotely sensed imagery and GIS. J. Environ. Manag. 2006, 79, 57–63. [Google Scholar] [CrossRef] [PubMed]
- Falchi, F.; Cinzano, P.; Elvidge, C.D.; Keith, D.M.; Haim, A. Limiting the impact of light pollution on human health, environment and stellar visibility. J. Environ. Manag. 2011, 92, 2714–2722. [Google Scholar] [CrossRef] [PubMed]
- Ahmed, N.; Islam, M.N.; Tuba, A.S.; Mahdy, M.R.C.; Sujauddin, M. Solving visual pollution with deep learning: A new nexus in environmental management. J. Environ. Manag. 2019, 248, 109253. [Google Scholar] [CrossRef]
- Eyenga, I.I.; Focke, W.W.; Prinsloo, L.C.; Tolmay, A.T. Photodegradation: A solution for the shopping bag “visual pollution” problem? Macromol. Symp. 2002, 178, 139–152. [Google Scholar] [CrossRef]
- Elena, E.; Cristian, M.; Suzana, P. Visual pollution: A new axiological dimension of marketing? Ann. Fac. Econ. 2012, 1, 820–826. [Google Scholar]
- Kolláth, Z.; Száz, D.; Kolláth, K.; Tong, K.P. Light Pollution Monitoring and Sky Colours. J. Imaging 2020, 6, 104. [Google Scholar] [CrossRef]
- Enache, E.; Morozan, C.; Purice, S. Visual Pollution: A New Axiological Dimension of Marketing. In Proceedings of the 8th Edition of the International Conference “European Integration—New Challenges” EINCO2012, Oradea, Romania, 25–26 May 2012; pp. 2046–2051. Available online: http://anale.steconomiceuoradea.ro/volume/2012/proceedings-einco-2012.pdf (accessed on 10 September 2020).
- Jana, M.K.; De, T. Visual Pollution Can Have a Deep Degrading Effect on Urban and Sub-Urban Community: A Study in Few Places of Bengal, India, With Special Reference to Unorganized Billboards. Eur. Sci. J. 2015, 7881, 1–14. [Google Scholar]
- Madleňák, R.; Madleňáková, L.; Hoštáková, D.; Drozdziel, P.; Török, A. The Analysis of the Traffic Signs Visibility during Night Driving. Adv. Sci. Technol. Res. J. 2018, 12, 71–76. [Google Scholar] [CrossRef]
- Tveit, M.S. Landscape assessment in metropolitan areas—Developing a visual indicator-based approach. SPOOL 2014, 1, 301–316. [Google Scholar] [CrossRef]
- Tveit, M.; Ode, Å.; Fry, G. Key concepts in a framework for analysing visual landscape character. Landsc. Res. 2007, 31, 229–255. [Google Scholar] [CrossRef]
- Wakil, K.; Naeem, M.A.; Anjum, G.A.; Waheed, A.; Thaheem, M.J.; ul Hussnain, M.Q.; Nawaz, R. A Hybrid Tool for Visual Pollution Assessment in Urban Environments. Sustainability 2019, 11, 2211. [Google Scholar] [CrossRef] [Green Version]
- Nowghabi, A.S.; Talebzadeh, A. Psyhological Influence of Advertising Billboards on City Sight. Civ. Eng. J. 2019, 5, 390–397. [Google Scholar] [CrossRef] [Green Version]
- Bakar, S.A.; Al-Sharaa, A.; Maulan, S.; Munther, R. Measuring Visual Pollution Threshold along Kuala Lumpur Historic Shopping District Streets Using Cumulative Area Analysis. Vis. Resour. Steward. Conf. 2019, 16, 1–14. [Google Scholar]
- Bedin, B.; Ferrari, M.; Gajardo, R. A Poluição Visual e o Seu Controle No Município de Caxias Do Sul a Partir Da Lei Municipal No. 412/2012. Rev. Direito Cid. 2015, 7, 1708–1749. [Google Scholar] [CrossRef] [Green Version]
- Cercleux, A.-L.; Merciu, F.-C.; Merciu, G.-L. A Model of Development Strategy Encompassing Creative Industries to Reduce Visual Pollution—Case Study: Strada Franceză, Bucharest’s Old City. Procedia Environ. Sci. 2016, 32, 404–411. [Google Scholar] [CrossRef] [Green Version]
- García Carrizo, J. Sustainable Outdoor Advertising in the Contemporary City. In Proceedings of the 6th International Conferences Creatives Cities, Orlando, FL, USA, 24–25 January 2018; pp. 252–269. [Google Scholar] [CrossRef]
- Aydin, C.C.; Nianci, R. Environmental Harmony and Evaluation of Advertisement Billboards with Digital Photogrammetry Technique and GIS Capabilities: A Case Study in the City of Ankara. Sensors 2008, 8, 3271–3286. [Google Scholar] [CrossRef]
- Uuemaa, E.; Mander, U.; Marja, R. Trends in the use of landscape spatial metrics as landscape indicators: A review. Ecol. Indic. 2013, 18, 100–106. [Google Scholar] [CrossRef]
- Tenerelli, P.; Püffel, C.; Luque, S. Spatial Assessment of Aesthetic Services in a Complex Mountain Region: Combining Visual Landscape Properties with Crowdsourced Geographic Information. Landsc. Ecol. 2017, 32, 1097–1115. [Google Scholar] [CrossRef]
- Bartie, P.; Reitsma, F.; Kingham, S.; Mills, S. Advancing Visibility Modelling Algorithms for Urban Environments. Comput. Environ. Urban Syst. 2010, 34, 518–531. [Google Scholar] [CrossRef]
- Bowman, D.A.; McMahan, R.P. Virtual reality: How much immersion is enough? Computer 2007, 40, 36–43. [Google Scholar] [CrossRef]
- Sahraoui, Y.; Clauzel, C.; Foltête, J.C. Spatial Modelling of Landscape Aesthetic Potential in Urban-Rural Fringes. J. Environ. Manag. 2016, 181, 623–636. [Google Scholar] [CrossRef] [PubMed]
- Sahraoui, Y.; Youssoufi, S.; Foltête, J.C. A Comparison of in situ and GIS Landscape Metrics for Residential Satisfaction Modeling. Appl. Geogr. 2016, 74, 199–210. [Google Scholar] [CrossRef]
- Youssoufi, S.; Houot, H.; Vuidel, G.; Pujol, S.; Mauny, F.; Foltête, J.C. Combining Visual and Noise Characteristics of a Neighbourhood Environment to Model Residential Satisfaction: An Application Using GIS-Based Metrics. Landsc. Urban Plan. 2020, 204, 103932. [Google Scholar] [CrossRef]
- Karasov, O.; Heremans, S.; Külvik, M.; Domnich, A.; Chervanyov, I. On How Crowdsourced Data and Landscape Organisation Metrics Can Facilitate the Mapping of Cultural Ecosystem Services: An Estonian Case Study. Land 2020, 9, 158. [Google Scholar] [CrossRef]
- Jean-Christophe, F.; Jens, I.; Nicolas, B. Coupling Crowd-Sourced Imagery and Visibility Modelling to Identify Landscape Preferences at the Panorama Level. Landsc. Urban Plan. 2020, 197, 103756. [Google Scholar] [CrossRef]
- Hilal, M.; Joly, D.; Roy, D.; Vuidel, G. Visual Structure of Landscapes Seen from Built Environment. Urban For. Urban Green. 2018, 32, 71–80. [Google Scholar] [CrossRef] [Green Version]
- Lee, K.Y.; Seo, J.I.; Kim, K.-N.; Lee, Y.; Kweon, H.; Kim, J. Application of Viewshed and Spatial Aesthetic Analyses to Forest Practices for Mountain Scenery Improvement in the Republic of Korea. Sustainability 2019, 11, 2687. [Google Scholar] [CrossRef] [Green Version]
- Niedźwiecka-Filipiak, I.; Rubaszek, J.; Podolska, A.; Pyszczek, J. Sectoral Analysis of Landscape Interiors (SALI) as One of the Tools for Monitoring Changes in Green Infrastructure Systems. Sustainability 2020, 12, 3192. [Google Scholar] [CrossRef] [Green Version]
- Chmielewski, T.J. Zmierzając ku Ogólnej Teorii Systemów Krajobrazowych. Probl. Ekol. Kraj. 2014, 21, 1–16. Available online: http://paek.ukw.edu.pl/pek/index.php/PEK/article/view/3131 (accessed on 8 July 2020).
- Nohl, W. Sustainable Landscape Use and Aesthetic Perception. Landsc. Urban Plan. 2001, 54, 223–237. [Google Scholar] [CrossRef]
- Antrop, M. Why Landscapes of the Past Are Important for the Future. Landsc. Urban Plan. 2005, 70, 21–34. [Google Scholar] [CrossRef]
- Papadimitriou, F. Modelling indicators and indices of landscape complexity: An approach using G.I.S. Ecol. Indic. 2002, 2, 17–25. [Google Scholar] [CrossRef]
- Hermes, J.; Van Berkel, D.; Burkhard, B.; Plieninger, T.; Fagerholm, N.; von Haaren, C.; Albert, C. Assessment and Valuation of Recreational Ecosystem Services of Landscapes. Ecosyst. Serv. 2018, 31, 289–295. [Google Scholar] [CrossRef]
- Solon, J.; Pomianowski, W. GraphScape—A new tool for analysing landscape spatial structure and connectivity. Probl. Ekol. Kraj. 2014, 38, 15–32. [Google Scholar]
- Nowosad, J.; Stepinski, T.F. Information Theory as a Consistent Framework for Quantification and Classification of Landscape Patterns. Landsc. Ecol. 2019, 34, 2091–2101. [Google Scholar] [CrossRef] [Green Version]
- Vranken, I.; Baudry, J.; Aubinet, M.; Visser, M.; Bogaert, J. A Review on the Use of Entropy in Landscape Ecology: Heterogeneity, Unpredictability, Scale Dependence and Their Links with Thermodynamics. Landsc. Ecol. 2015, 30, 51–65. [Google Scholar] [CrossRef] [Green Version]
- Wang, C.; Zhao, H. Spatial Heterogeneity Analysis: Introducing a New Form of Spatial Entropy. Entropy 2018, 20, 398. [Google Scholar] [CrossRef] [Green Version]
- McGarigal, K.; Cushman, S.A.; Ene, E. FRAGSTATS v4: Spatial Pattern Analysis Program for Categorical and Continuous Maps. Computer Software Program Produced by the Authors at the University of Massachusetts, Amherst. 2012. Available online: http://www.umass.edu/landeco/research/fragstats/fragstats.html (accessed on 14 August 2020).
- Adamczyk, J.; Tiede, D. ZonalMetrics—A Python Toolbox for Zonal Landscape Structure Analysis. Comput. Geosci. 2017, 99, 91–99. [Google Scholar] [CrossRef]
- Lustig, A.; Stouffer, D.; Roigé, M.; Worner, S. Towards more predictable and consistent landscape metrics across spatial scales. Ecol. Indic. 2015, 57, 11–21. [Google Scholar] [CrossRef]
- Mantey, D.; Pokojski, W. New Indicators of Spatial Chaos in the Context of the Need for Retrofitting Suburbs. Land 2020, 9, 276. [Google Scholar] [CrossRef]
- Sahraoui, Y.; Vuidel, G.; Joly, D.; Foltête, J.C. Integrated GIS Software for Computing Landscape Visibility Metrics. Trans. GIS 2018, 22, 1310–1323. [Google Scholar] [CrossRef]
- Hamilton, J.L.; Gerald, J. Visual Pollution Study, a Report to the Citizens of Jacksonville; Jacksonville Community Council, Inc.: Jacksonville, FL, USA, 1985; Volume 4, pp. 1–23. Available online: https://digitalcommons.unf.edu/jcci/4 (accessed on 5 December 2020).
- Nessim, A.A.; Khodeir, L.M. Evaluating the Visual and Light Pollution from Outdoor Advertising in Egyptian Streets. J. Eng. Appl. Sci. 2020, 67, 789–808. [Google Scholar]
- Petřík, P.; Fanta, J.; Petrtýl, M. It Is Time to Change Land Use and Landscape Management in the Czech Republic. Ecosyst. Health Sustain. 2015, 1, 1–6. [Google Scholar] [CrossRef]
- PricewaterhouseCoopers Annual Rapport 2011. Available online: http://www.pwc.pl/pl/wielkie-miasta-polski/raport_Lublin_2011.pdf (accessed on 10 October 2020).
- Polish Outdoor Advertising Chamber of Commerce 2016. Available online: http://igrz.home.pl/RAPORT%20OOH%202016.pdf (accessed on 10 October 2020).
- Jang, W.; Shin, J.H.; Kim, M.; Kim, K. Human Field of Regard, Field of View, and Attention Bias. Comput. Methods Programs Biomed. 2016, 135, 115–123. [Google Scholar] [CrossRef] [PubMed]
- Younis, O.; Al-Nuaimy, W.; Alomari, M.H.; Rowe, F. A Hazard Detection and Tracking System for People with Peripheral Vision Loss Using Smart Glasses and Augmented Reality. Int. J. Adv. Comput. Sci. Appl. 2019, 10, 1–9. [Google Scholar] [CrossRef] [Green Version]
- Liu, M.; Nijhuis, S. Mapping Landscape Spaces: Methods for Understanding Spatial-Visual Characteristics in Landscape Design. Environ. Impact Assess. Rev. 2020, 82, 106376. [Google Scholar] [CrossRef]
- Simpson, M.J. Mini-Review: Far Peripheral Vision. Vision Res. 2017, 140, 96–105. [Google Scholar] [CrossRef]
- Vukomanovic, J.; Orr, B.J. Landscape Aesthetics and the Scenic Drivers of Amenity Migration in the New West: Naturalness, Visual Scale, and Complexity. Land 2014, 3, 390–413. [Google Scholar] [CrossRef] [Green Version]
- Van der Ham, R.J.M.; Iding, J.A. De Landschaps-Typologie Naar Visuele Kenmerken. Methodiek en Gebruik; Department of Landscape Architecture, Wageningen University: Wageningen, The Netherlands, 1971. [Google Scholar]
- Kułaga, Z.; Litwin, M.; Tkaczyk, M.; Palczewska, I.; Zajączkowska, M.; Zwolińska, D.; Krynicki, T.; Wasilewska, A.; Moczulska, A.; Morawiec-Knysak, A.; et al. Polish 2010 Growth References for School-Aged Children and Adolescents. Eur. J. Pediatr. 2011, 170, 599–609. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Schirpke, U.; Tasser, E.; Tappeiner, U. Predicting Scenic Beauty of Mountain Regions. Landsc. Urban Plan. 2013, 111, 1–12. [Google Scholar] [CrossRef]
- Polish National Geoportal. Available online: www.geoportal.gov.pl (accessed on 6 September 2020).
- Wang, Y.; Weinacker, H.; Koch, B.A. Lidar point cloud based procedure for vertical canopy structure analysis and 3D single tree modelling in forest. Sensors 2008, 8, 3938–3951. [Google Scholar] [CrossRef] [PubMed]
- PixScape Software User Manual 2019. Available online: https://sourcesup.renater.fr/www/pixscape/download/manual-en.pdf (accessed on 10 October 2020).
- Hayward, S.; Franklin, S. Perceived Openness-Enclosure of Architectural Space. Environ. Behav. 1964, 6, 37–52. [Google Scholar] [CrossRef]
- Stamps, A.E. Evaluating Enclosure in Urban Sites. Landsc. Urban Plan. 2001, 57, 25–42. [Google Scholar] [CrossRef]
- Yanru, H.; Masoudi, M.; Chadala, A.; Olszewska-Guizzo, A. Visual Quality Assessment of Urban Scenes with the Contemplative Landscape Model: Evidence from a Compact City Downtown Core. Remote Sens. 2020, 12, 3517. [Google Scholar] [CrossRef]
- Carballal, A.; Fernandez-Lozano, C.; Rodriguez-Fernandez, N.; Santos, I.; Romero, J. Comparison of Outlier-Tolerant Models for Measuring Visual Complexity. Entropy 2020, 22, 488. [Google Scholar] [CrossRef]
- Douchová, V. Birkhoff’s Aesthetic Measure. Auc. Philos. Hist. 2016, 2015, 39–53. [Google Scholar] [CrossRef]
- Pieters, R.; Wedel, M.; Batra, R. The Stopping Power of Advertising: Measures and Effects of Visual Complexity. J. Mark. 2010, 74, 48–60. [Google Scholar] [CrossRef]
- Berlyne, D. Novelty, complexity, and hedonic value. Percept. Psychophys. 1970, 8, 279–286. [Google Scholar] [CrossRef]
- Durmus, D. Spatial frequency and the performance of image-based visual complexity metrics. IEEE Access 2020, 8, 100111–100119. [Google Scholar] [CrossRef]
- Chung, S.K.; Kirby, M.S. Media Literacy Art Education: Logos, Culture Jamming, and Activism. Art Educ. 2009, 62, 34–39. [Google Scholar] [CrossRef]
- Dekeyser, T. Dismantling the Advertising City: Subvertising and the Urban Commons to Come. Environ. Plan. D Soc. Space 2020, 1–19. [Google Scholar] [CrossRef]
- Dekeyser, T. The material geographies of advertising: Concrete objects, affective affordance and urban space. Environ. Plan. A Econ. Space 2018, 50, 1425–1442. [Google Scholar] [CrossRef]
- Iveson, K. Branded Cities: Outdoor Advertising, Urban Governance, and the Outdoor Media Landscape. Antipode 2012, 44, 151–174. [Google Scholar] [CrossRef]
- Lynch, K. The Image of the City; The MIT Press: Cambridge, MA, USA, 1960. [Google Scholar]
- Oleński, W. Postrzeganie Krajobrazu Miasta w Warunkach Wertykalizacji Zabudowy. Ph.D. Thesis, Politechnika Krakowska, Kraków, Poland, 2014. Available online: https://repozytorium.biblos.pk.edu.pl/redo/resources/26294/file/suwFiles/OlenskiW_PostrzeganieKrajobrazu.pdf (accessed on 10 October 2020).
- Walter, J.A. Order and chaos in landscape. Landsc. Res. 1985, 10, 2–8. [Google Scholar] [CrossRef]
- Rombos, N.A. Aspects of Order and Chaos for the Cityscape; Syracuse University: New York, NY, USA, 1971; pp. 141–145. [Google Scholar]








{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Metrics | Median | Mini | Max | Q1 | Q3 | n/No Change | Kurtosis | Sign Test (p-Value) | Wilcoxon Test (p-Value) |
|---|---|---|---|---|---|---|---|---|---|
| Area, OAfree (F) | 2910.6 | 2269.8 | 11894.3 | 2723.8 | 3402.8 | 65/6 | 24.546 | 7.550957 | 6.679959 |
| Area, OA (F) | 3267.8 | 2454.9 | 11894.3 | 2872.1 | 4359.3 | 15.439 | (0.000000) | (0.000000) | |
| % point | 12.27% | 8.15% | 0.00% | 5.44% | 28.11% | ||||
| Area, OAfree (B) | 2883.0 | 2265.6 | 10584.8 | 2643.9 | 3452.7 | 65/4 | 13.922 | 7.747008 | 6.846313 |
| Area, OA (B) | 3443.0 | 2616.6 | 10584.8 | 2951.9 | 4040.0 | 8.499 | (0.000000) | (0.000000) | |
| % point | 19.42% | 15.49% | 0.00% | 11.65% | 17.01% | ||||
| DistMax, OAfree (F) | 858.0 | 73.3 | 999.3 | 664.6 | 943.4 | 65/53 | 2.086 | 3.175426 | 3.059412 |
| DistMax, OA (F) | 787.4 | 73.3 | 999.3 | 652.3 | 905.2 | 1.345 | (0.001496) | (0.002218) | |
| % point | −8.22% | 0.00% | 0.00% | −1.85% | −4.05% | ||||
| DistMax, OAfree (B) | 793.5 | 189.7 | 999.1 | 602.9 | 880.2 | 66/49 | 0.117 | 3.880570 | 3.621365 |
| DistMax, OA (B) | 724.8 | 189.7 | 999.1 | 590.2 | 869.4 | 0.081 | (0.000104) | (0.000293) | |
| % point | −8.66% | 0.00% | 0.00% | −2.11% | −1.23% | ||||
| SL, OAfree (F) | 1.963 | 1.599 | 3.445 | 1.809 | 2.212 | 65/12 | 0.154 | 6.249068 | 6.544095 |
| SL, OA (F) | 2.067 | 1.803 | 3.678 | 1.933 | 2.558 | 0.153 | (0.000000) | (0.00000) | |
| % point | 5.30% | 12.76% | 6.76% | 6.85% | 15.64% | ||||
| SL, OAfree (B) | 1.964 | 1.551 | 3.422 | 1.730 | 2.478 | 66/9 | 0.318 | 5.715006 | 6.264394 |
| SL_OA (B) | 2.200 | 1.607 | 3.560 | 1.993 | 2.558 | 0.566 | (0.000000) | (0.000000) | |
| % point | 12.02% | 3.61% | 4.03% | 15.20% | 3.23% | ||||
| SD, OAfree (F) | 0.783 | 0.184 | 0.999 | 0.562 | 0.914 | 65/14 | 0.555 | 4.314879 | 4.817665 |
| SD, OA (F) | 0.850 | 0.413 | 0.999 | 0.630 | 0.961 | 0.924 | (0.000016) | (0.000001) | |
| % point | 8.56% | 24.46 | 0.00% | 12.10% | 5.14% | ||||
| SD, OAfree (B) | 0.836 | 0.253 | 0.999 | 0.623 | 0.935 | 66/18 | 0.063 | 2.384158 | 2.848357 |
| SD, OA (B) | 0.860 | 0.317 | 0.999 | 0.694 | 0.932 | 0.081 | (0.017118) | (0.004395) | |
| % point | 2.87% | 25.30% | 0.00 | 11.40% | −0.32% | ||||
| DL, OAfree (F) | 17.445 | 4.712 | 33.600 | 13.463 | 21.587 | 65/6 | 0.074 | 0.260378 | 1.826610 |
| DL, OA (F) | 17.06 | 4.712 | 33.897 | 13.777 | 20.698 | 0.248 | (0.794572) | (0.067759) | |
| % point | −2.21% | 0.00% | 0.88% | 2.33% | −4.12% | ||||
| DL, OAfree (B) | 15.673 | 4.9310 | 40.421 | 10.410 | 19.546 | 66/4 | 2.544 | 0.127000 | 1.447787 |
| DL, OA (B) | 14.987 | 4.9776 | 40.421 | 10.890 | 18.221 | 3.611 | (0.898940) | (0.147678) | |
| % point | −4.38% | 0.95% | 0.00 | 4.61 | −6.78 |
| Metrics | Median | Mini | Max | Q1 | Q3 | n/No Change | Kurtosis | Sign Test (p-Value) | Wilcoxon Test (p-Value) |
|---|---|---|---|---|---|---|---|---|---|
| Area, OAfree (F) | 7384.6 | 5635.3 | 11579.5 | 5878.2 | 7955.4 | 41/9 | 0.831 | 5.480078 | 4.936520 |
| Area, OA (F) | 7721.5 | 5635.4 | 11579.5 | 6397.8 | 8211.4 | 0.707 | (0.000000) | (0.000001) | |
| % point | 4.56% | 0.00 | 0.00 | 8.84% | 3.22% | ||||
| Area, OAfree (B) | 8328.3 | 5842.3 | 10513.2 | 6582.9 | 8843.3 | 41/12 | −0.997 | 5.199469 | 4.703046 |
| Area, OA (B) | 8506.6 | 5843.2 | 10516.5 | 7159.7 | 8886.4 | −0.860 | (0.000000) | (0.000003) | |
| % point | 2.14% | 0.02% | 0.03% | 8.76% | 0.49% | ||||
| DistMax, OAfree (F) | 949.5 | 557.1 | 1000.2 | 837.1 | 980.5 | 41/30 | 0.630 | 3.015113 | 2.934058 |
| DistMax, OA (F) | 898.5 | 115.0 | 1000.2 | 712.9 | 965.2 | 3.213 | (0.002569) | (0.003346) | |
| % point | −5.37% | −79.36% | 0.00 | −14.84% | −5.37% | ||||
| DistMax, OAfree (B) | 273.6 | 94.881 | 1000.0 | 166.243 | 551.502 | 41/34 | −0.406195 | 2.267787 | 2.366432 |
| DistMax, OA (B) | 273.6 | 83.055 | 1000.0 | 148.000 | 465.893 | 0.028178 | (0.023342) | (0.017961) | |
| % point | 0.00% | −12.46% | 0.00% | −10.97% | −15.52% | ||||
| SL, OAfree (F) | 1.950 | 1.587 | 3.720 | 1.851 | 2.163 | 41/10 | 0.267 | 0.176777 | (0.00000 |
| SL, OA (F) | 1.998 | 1.583 | 3.850 | 1.852 | 2.156 | 0.575 | (0.859684) | (1.00000) | |
| % point | 2.46% | −0.25% | 3.49% | 0.05% | −0.32% | ||||
| SL, OAfree (B) | 1.772 | 1.551 | 3.531 | 1.691 | 1.995 | 41/19 | 0.082 | 1.485563 | 2.865074 |
| SL_OA (B) | 1.859 | 1.535 | 3.510 | 1.752 | 2.087 | −0.006 | (0.137395) | (0.004169) | |
| % point | 4.91 | −1.03 | −0.59 | 3.61 | 4.61 | ||||
| SD, OAfree (F) | 0.739 | 0.143 | 0.992 | 0.599 | 0.822 | 41/12 | 0.541 | 0.742781 | 1.286580 |
| SD, OA (F) | 0.718 | 0.143 | 0.997 | 0.565 | 0.838 | −0.043 | (0.457614) | (0.198241) | |
| % point | −2.84% | 0.00% | 0.50% | −5.68% | 1.95% | ||||
| SD, OAfree (B) | 0.697 | 0.093 | 0.994 | 0.406 | 0.780 | 41/16 | −0.735 | 0.400000 | 1.735496 |
| SD, OA (B) | 0.672 | 0.093 | 0.999 | 0.467 | 0.837 | −0.675 | (0.689157) | (0.082654) | |
| % point | −3.59% | 0.00% | 0.50% | 15.02% | 7.31% | ||||
| DL, OAfree (F) | 22.271 | 7.965 | 34.191 | 18.487 | 25.355 | 41/9 | −0.513 | 2.298097 | 2.917035 |
| DL, OA (F) | 19.629 | 7.965 | 32.588 | 16.150 | 22.519 | −0.714 | (0.021556) | (0.003534) | |
| % point | −11.86 | 0.00 | −4.69 | −12.64 | −11.19 | ||||
| DL, OAfree (B) | 9.069 | 5.421 | 30.716 | 7.356 | 14.050 | 41/12 | 2.354 | 0.742781 | 0.637884 |
| DL, OA (B) | 8.902 | 5.132 | 23.237 | 7.092 | 14.976 | −0.443 | (0.457614) | (0.523549) | |
| % point | −1.84 | −5.33 | −24.35 | −3.59 | 6.59 |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2020 by the author. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Chmielewski, S. Chaos in Motion: Measuring Visual Pollution with Tangential View Landscape Metrics. Land 2020, 9, 515. https://doi.org/10.3390/land9120515
Chmielewski S. Chaos in Motion: Measuring Visual Pollution with Tangential View Landscape Metrics. Land. 2020; 9(12):515. https://doi.org/10.3390/land9120515
Chicago/Turabian StyleChmielewski, Szymon. 2020. "Chaos in Motion: Measuring Visual Pollution with Tangential View Landscape Metrics" Land 9, no. 12: 515. https://doi.org/10.3390/land9120515
APA StyleChmielewski, S. (2020). Chaos in Motion: Measuring Visual Pollution with Tangential View Landscape Metrics. Land, 9(12), 515. https://doi.org/10.3390/land9120515