Temporal-Spatial Nonlinear Filtering for Infrared Focal Plane Array Stripe Nonuniformity Correction


Abstract
:1. Introduction
- The proposed NUC algorithm accurately determines the nonuniformity information and efficiently removes the corresponding nonuniformity under the guidance of the estimated nonuniformity label. Due to the nonlinear filtering used in the temporal domain, our method requires fewer sequential frames in a video to realize more accurate correction results. In addition, it does not have the problem of slow convergence and ghosting artifacts.
- Based on the observation that a weighted guided image filter can be used as a satisfactory nonuniformity estimate in the spatial domain, a novel global weight map sensitive to stripe noise is introduced into the guided image filter to improve its efficiency in suppressing stripe noise and preserving edge information.
- Compared with the single-frame-based NUC methods, our proposed method makes full use of the temporal characteristic of the nonuniformity to substantially improve the nonuniformity estimation accuracy. Consequently, the degradation of the corrected image is greatly reduced.
2. Related Works
2.1. Scene-Based Nonuniformity Correction
2.2. Nonuniformity Correction Formation
3. Weighted Guided Image Filtering and Global Weight Map
3.1. Analysis of the Global Weight Map
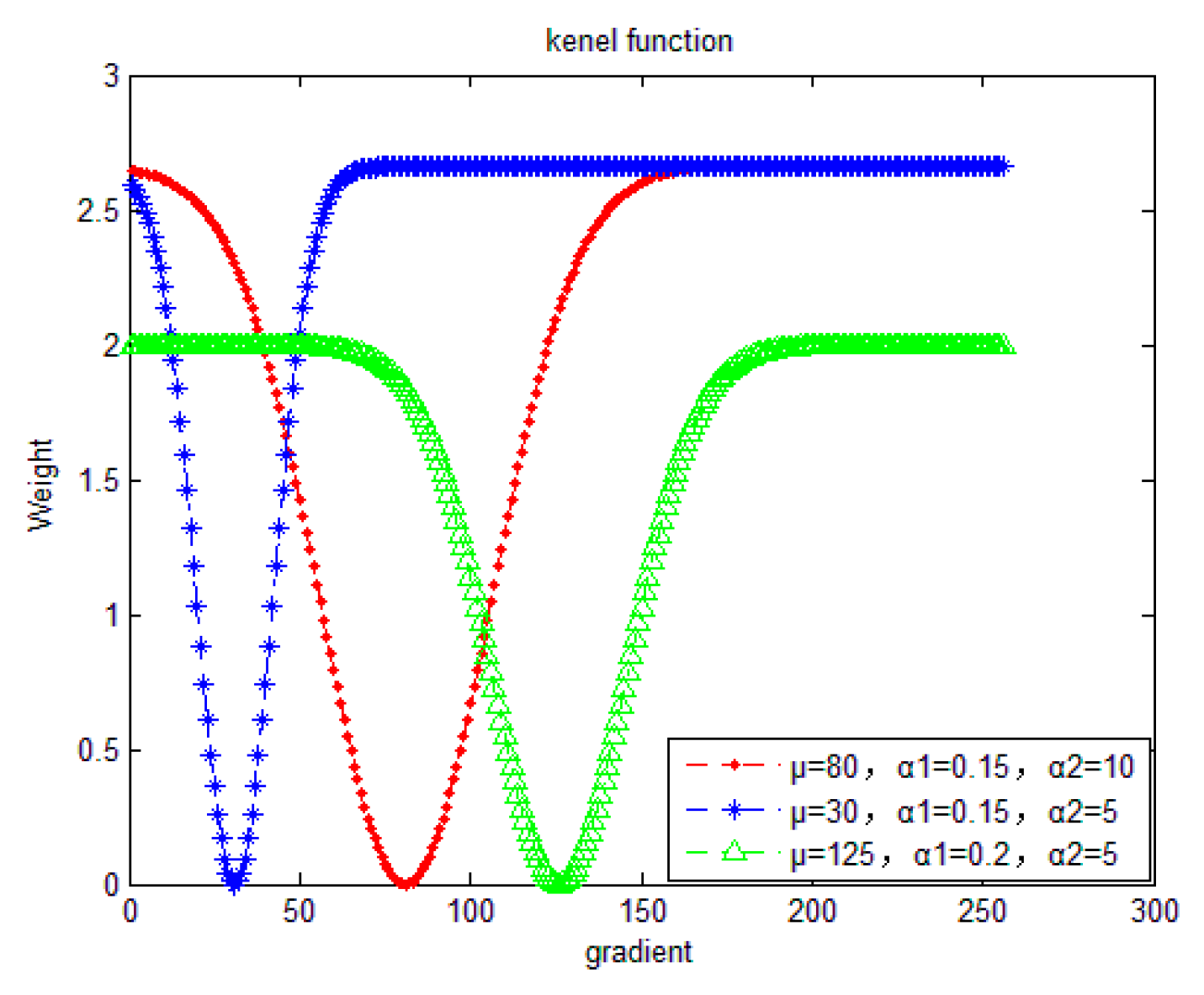
3.2. Kernel Function
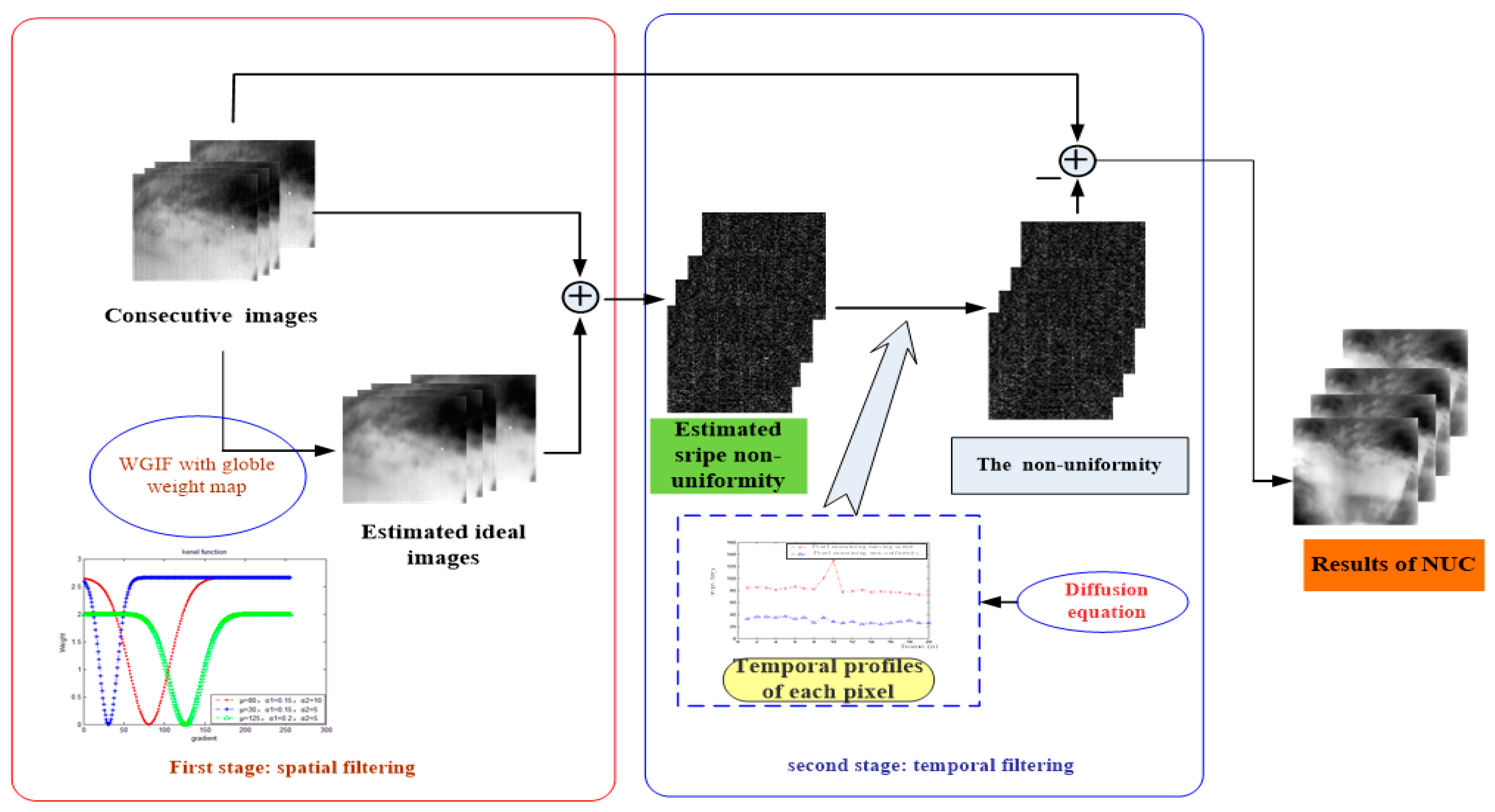
4. Proposed Method
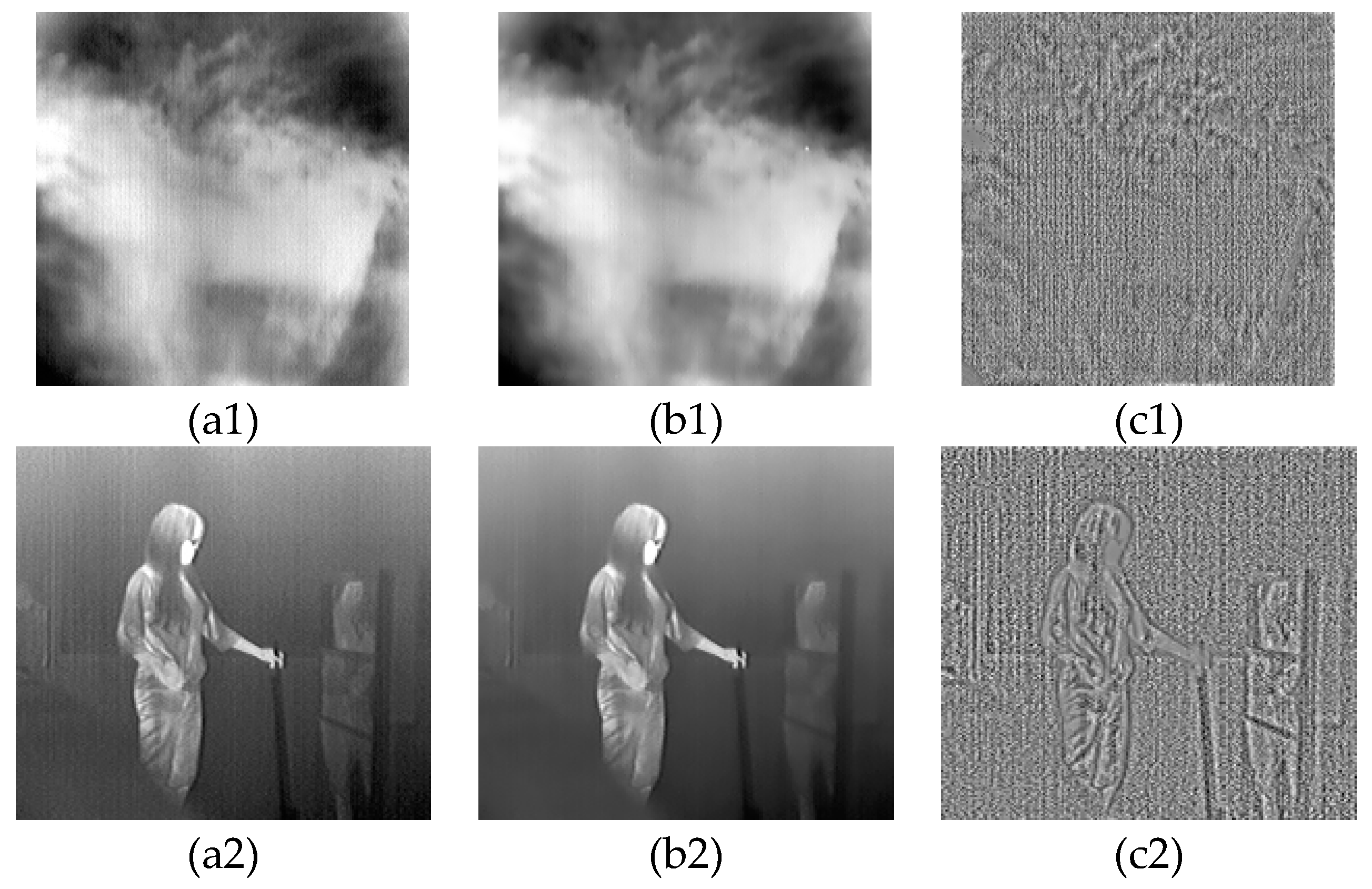
4.1. Spatial-Domain Nonuniformity Estimation via Weighted Guided Image Filtering
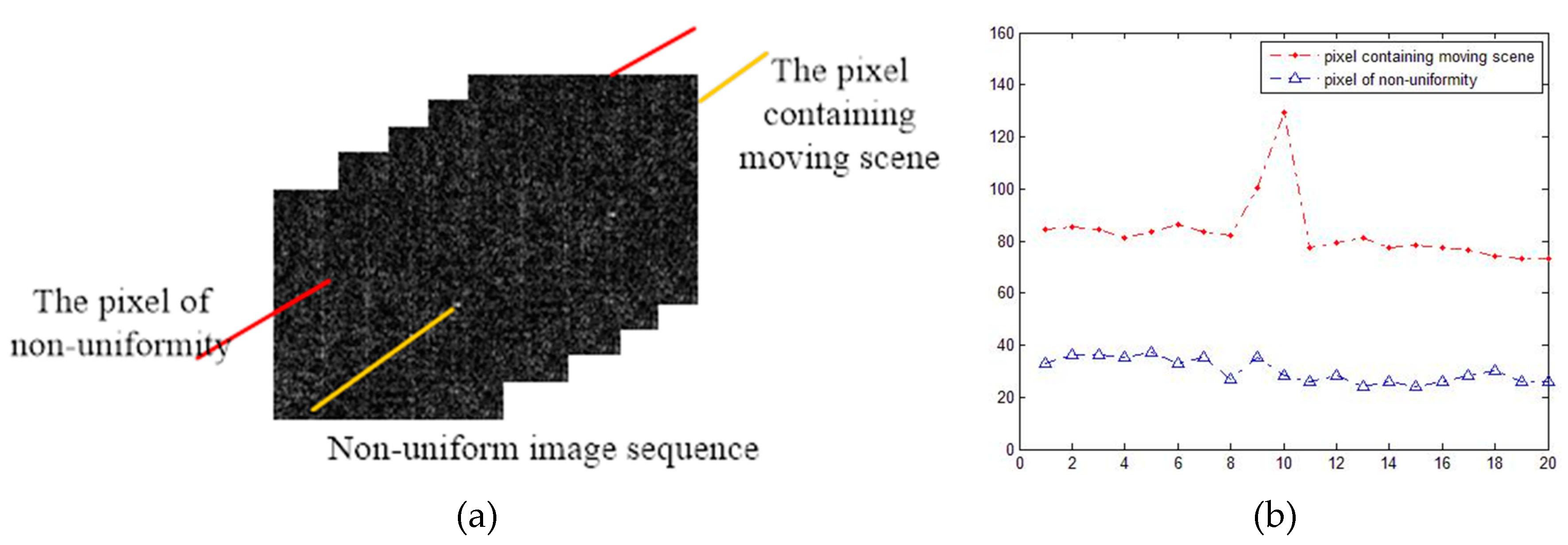
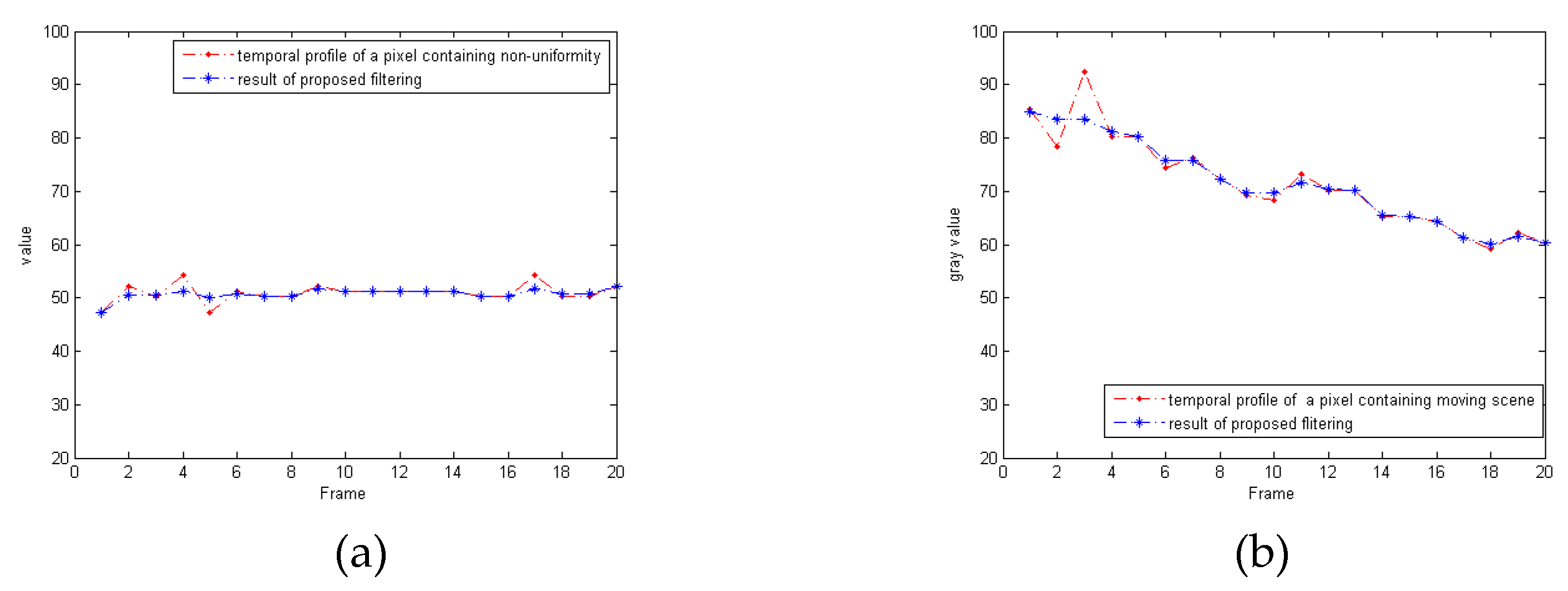
4.2. Temporal-Domain Nonuiformity Correction Via a Nonlinear Diffusion Equation
5. Experiment and Analysis
5.1. Objective NUC Quality Metrics
5.2. Implementation Details
5.3. Experiment Results and Discussion
5.3.1. Experiment 1
5.3.2. Experiment 2
6. Conclusions
Author Contributions
Funding
Conflicts of Interest
References
- Scribner, D.A.; Kruer, M.R.; Killiany, J.M. Infrared focal plane array technology. Proc. IEEE 1991, 79, 66–85. [Google Scholar] [CrossRef]
- Friedenberg, A.; Goldblatt, I. Nonuniformity two-point linear correction errors in infrared focal plane arrays. Opt. Eng. 1998, 37, 1251–1253. [Google Scholar] [CrossRef]
- Sungho, K. Two-point correction and minimum filter-based nonuniformity correction for scan-based aerial infrared cameras. Opt. Eng. 2012, 51, 106401. [Google Scholar]
- Scribner, D.A. Nonuniformity correction for staring IR focal plane arrays using scene-based techniques. In Proceedings of the International Society for Optics and Photonics (SPIE), Washington, DC, USA, 1 September 1990; pp. 225–233. [Google Scholar]
- Scribner, D.A. Adaptive nonuniformity correction for IR focal-plane arrays using neural networks. In Proceedings of the International Society for Optics and Photonics (SPIE), San Diego, CA, USA, 1 November 1991; pp. 100–109. [Google Scholar]
- Guan, J.; Lai, R.; Xiong, A. Wavelet Deep Neural Network for Stripe Noise Removal. IEEE Access 2019, 7, 44544–44554. [Google Scholar] [CrossRef]
- Liu, C.W.; Sui, X.B.; Liu, Y. FPN estimation based nonuniformity correction for infrared imaging system. Infrared Phys. Technol. 2019, 96, 22–29. [Google Scholar] [CrossRef]
- Lai, R.; Guan, J.; Yang, Y. Spatiotemporal Adaptive Nonuniformity Correction Based on BTV Regularization. IEEE Access 2019, 7, 753–762. [Google Scholar] [CrossRef]
- Jian, X.Z.; Lu, R.Z.; Guo, Q.; Wang, G.P. Single image non-uniformity correction using compressive sensing. Infrared Phys. Technol. 2016, 76, 360–364. [Google Scholar] [CrossRef]
- Harris, J.G.; Chiang, Y.M. Nonuniformity correction of infrared image sequences using the constant-statistics constraint. IEEE Trans. Image Process. 1999, 8, 1148–1151. [Google Scholar] [CrossRef]
- Qian, W.; Chen, Q.; Gu, G. Space low-pass and temporal high-pass nonuniformity correction algorithm. Opt. Rev. 2010, 17, 24–29. [Google Scholar] [CrossRef]
- Zuo, C.; Chen, Q.; Gu, G.; Qian, W. New Temporal High-Pass Filter Nonuniformity Correction Based on Bilateral Filter. Opt. Rev. 2011, 18, 197–202. [Google Scholar] [CrossRef]
- Li, Z.; Shen, T.; Lou, S. Scene-based nonuniformity correction based on bilateral filter with reduced ghosting. Infrared Phys. Technol. 2016, 77, 360–365. [Google Scholar] [CrossRef]
- Zhang, T.X.; et al. PDE-based deghosting algorithm for correction of non-uniformity in infrared focal plane array. J. Infrared Millim. Waves 2012, 31, 177–182. [Google Scholar] [CrossRef]
- Lai, R.; Yue, G.; Zhang, G. Total Variation Based Neural Network Regression for Nonuniformity Correction of Infrared Images. Symmetry 2018, 10, 157. [Google Scholar] [CrossRef]
- Hardie, R.C.; Baxley, F.; Brys, B.; Hytla, P. Scene-Based Nonuniformity Correction with Reduced Ghosting Using a Gated LMS Algorithm. Opt. Express 2009, 17, 14918–14933. [Google Scholar] [CrossRef]
- Zhou, D.; Wang, D.; Huo, L.; Liu, R.; Jia, P. Scene-based nonuniformity correction for airborne point target detection systems. Opt. Express 2017, 25, 14210–14226. [Google Scholar] [CrossRef]
- Hardie, R.C.; Hayat, M.M.; Armstrong, E.; Yasuda, B. Armstrong. Scene-Based Nonuniformity Correction with Video Sequences and Registration. Appl. Opt. 2000, 39, 1241–1250. [Google Scholar] [CrossRef]
- Zeng, J.; Sui, X.; Gao, H. Adaptive Image-Registration-Based Nonuniformity Correction Algorithm with Ghost Artifacts Eliminating for Infrared Focal Plane Arrays. IEEE Photonic J. 2015, 7, 1–16. [Google Scholar] [CrossRef]
- Rong, S.H.; Zhou, H.X.; Qin, H.L. Nonuniformity correction for an infrared focal plane array based on diamond search block matching. JOSA A 2016, 33, 938–946. [Google Scholar]
- Tendero, Y.; Landeau, S.; Gilles, J. Non-Uniformity Correction of Infrared Images by Midway Equalization. Image Process. Line 2012, 2, 134–146. [Google Scholar] [CrossRef]
- Kuang, X.; Sui, X.; Chen, Q.; Gu, G. Single infrared image stripe noise removal using deep convolutional networks. IEEE Photonics J. 2017, 9, 1–13. [Google Scholar] [CrossRef]
- He, Z.; Cao, Y.; Dong, Y.; Yang, J.; Cao, Y.; Tisse, C.L. Single-image-based nonuniformity correction of uncooled long-wave infrared detectors: a deep-learning approach. Appl. Opt. 2018, 57, D155–D164. [Google Scholar] [CrossRef]
- Zeng, Q.; Qin, H.; Yan, X.; Yang, S.; Yang, T. Single Infrared Image-Based Stripe Nonuniformity Correction via a Two-Stage Filtering Method. Sensors 2018, 18, 4299. [Google Scholar] [CrossRef]
- Black, W.T.; Tyo, J.S. Feedback-integrated scene cancellation scene-based nonuniformity correction algorithm. J. Electron. Imaging 2014, 23, 023005. [Google Scholar] [CrossRef]
- Li, Z.; Zheng, J.; Zhu, Z.; Yao, W.; Wu, S. Weighted Guided Image Filtering. IEEE Trans. Image Process. 2015, 24, 120–129. [Google Scholar]
- He, K.; Sun, J.; Tang, X. Guided Image Filtering. IEEE Trans. Pattern Anal. Mach. Intell. 2013, 35, 1397–1409. [Google Scholar] [CrossRef]
- Li, Z.; Zheng, J. Edge-preserving decomposition-based single image haze removal. IEEE Trans. Image Process. 2015, 24, 5432–5441. [Google Scholar] [CrossRef]
- Li, Z.; Zheng, J. Detail-Enhanced Multi-Scale Exposure Fusion. IEEE Trans. Image Process. 2017, 26, 1243–1252. [Google Scholar] [CrossRef]
- Kou, F.; Chen, W.; Wen, C.; Li, Z. Gradient Domain Guided Image Filtering. IEEE Trans. Image Process. 2015, 24, 4528–4539. [Google Scholar] [CrossRef]
- Zhao, J.; Zhou, Q.; Chen, Y.; Liu, T.; Feng, H.; Xu, Z.; Li, Q. Single image stripe nonuniformity correction with gradient-constrained optimization model for infrared focal plane arrays. Opt. Commun. 2013, 296, 47–52. [Google Scholar] [CrossRef]















{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Method | Parameter Settings |
|---|---|
| BTHPF-NUC | The size of the filter window: D = 4; the two standard deviation parameters: σd = 7 and σr = 30; the time constant: T = 3 |
| TVRNN NN-NUC | The spatial average kernel size: 9 × 9; iterative step: |
| MIRE NUC | Regulation parameter: s = 1; the window size: 8 × s. |
| CNN NUC | Trained CNN in the literature [23] |
| Proposed method | wd = 5, σ1 = 0.003, σ2 = 10, r = 20, α = −0.8, and m = 10 |
| Method | The 100th Frame of Seq. 1 | The 50th Frame of Seq. 2 | The 50th Frame of Seq. 3 | The 200th Frame of Seq. 4 | ||||
|---|---|---|---|---|---|---|---|---|
| U/% | ρ/% | U/% | ρ/% | U/% | ρ/% | U/% | ρ/% | |
| Original image | 11.12 | 16.94 | 2.36 | 3.88 | 5.66 | 5.34 | 8.48 | 10.61 |
| BTHPF-NUC | 6.95 | 8.52 | 1.11 | 1.33 | 4.11 | 3.73 | 6.06 | 5.61 |
| TVRNN NN-NUC | 10.16 | 15.47 | 1.79 | 2.85 | 5.47 | 5.08 | 7.99 | 9.05 |
| MIRE NUC | 10.34 | 16.56 | 2.11 | 3.68 | 5.52 | 5.41 | 7.87 | 10.37 |
| CNN NUC | 11.47 | 17.62 | 2.25 | 3.87 | 5.58 | 5.33 | 8.51 | 10.83 |
| Proposed method | 6.53 | 3.61 | 0.91 | 0.56 | 3.72 | 1.55 | 5.91 | 1.66 |
© 2019 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Li, J.; Qin, H.; Yan, X.; Zeng, Q.; Yang, T. Temporal-Spatial Nonlinear Filtering for Infrared Focal Plane Array Stripe Nonuniformity Correction. Symmetry 2019, 11, 673. https://doi.org/10.3390/sym11050673
Li J, Qin H, Yan X, Zeng Q, Yang T. Temporal-Spatial Nonlinear Filtering for Infrared Focal Plane Array Stripe Nonuniformity Correction. Symmetry. 2019; 11(5):673. https://doi.org/10.3390/sym11050673
Chicago/Turabian StyleLi, Jia, Hanlin Qin, Xiang Yan, Qingjie Zeng, and Tingwu Yang. 2019. "Temporal-Spatial Nonlinear Filtering for Infrared Focal Plane Array Stripe Nonuniformity Correction" Symmetry 11, no. 5: 673. https://doi.org/10.3390/sym11050673
APA StyleLi, J., Qin, H., Yan, X., Zeng, Q., & Yang, T. (2019). Temporal-Spatial Nonlinear Filtering for Infrared Focal Plane Array Stripe Nonuniformity Correction. Symmetry, 11(5), 673. https://doi.org/10.3390/sym11050673