Vacant Parking Slot Recognition Method for Practical Autonomous Valet Parking System Using around View Image




Abstract
:1. Introduction
- While detecting location of parking slot junctions, the proposed method utilizes both parking slot line and its corner information; therefore, it is robust to locational errors of the corner detection induced from occluded or broken slot lines.
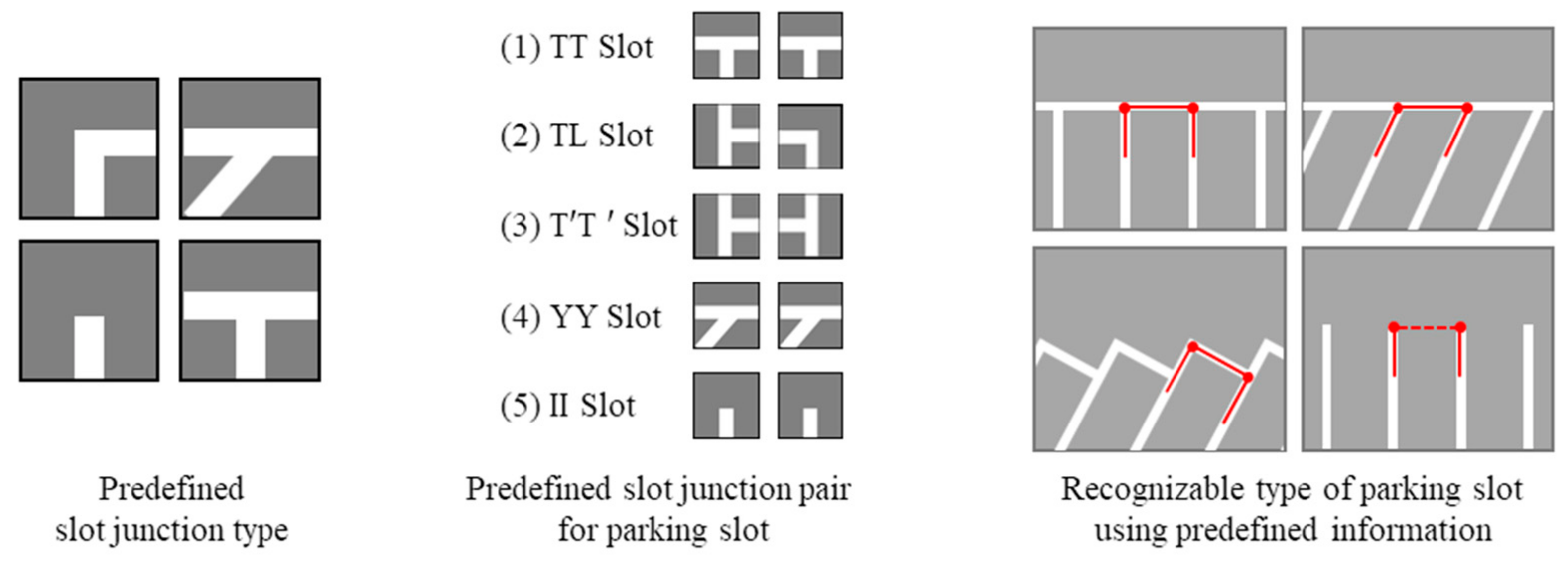
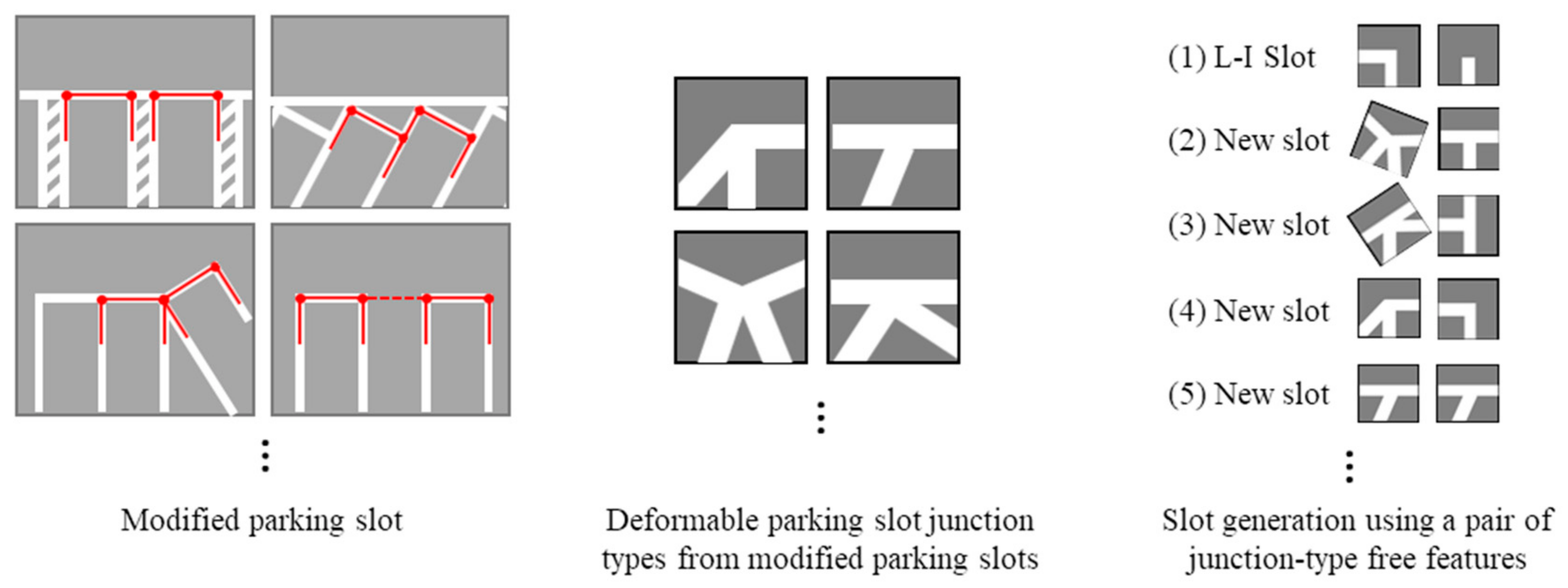
- Unlike the existing slot junction features, the proposed method can effectively represent the modified shape of parking slots due to deformable characteristic of the proposed free junction type features.
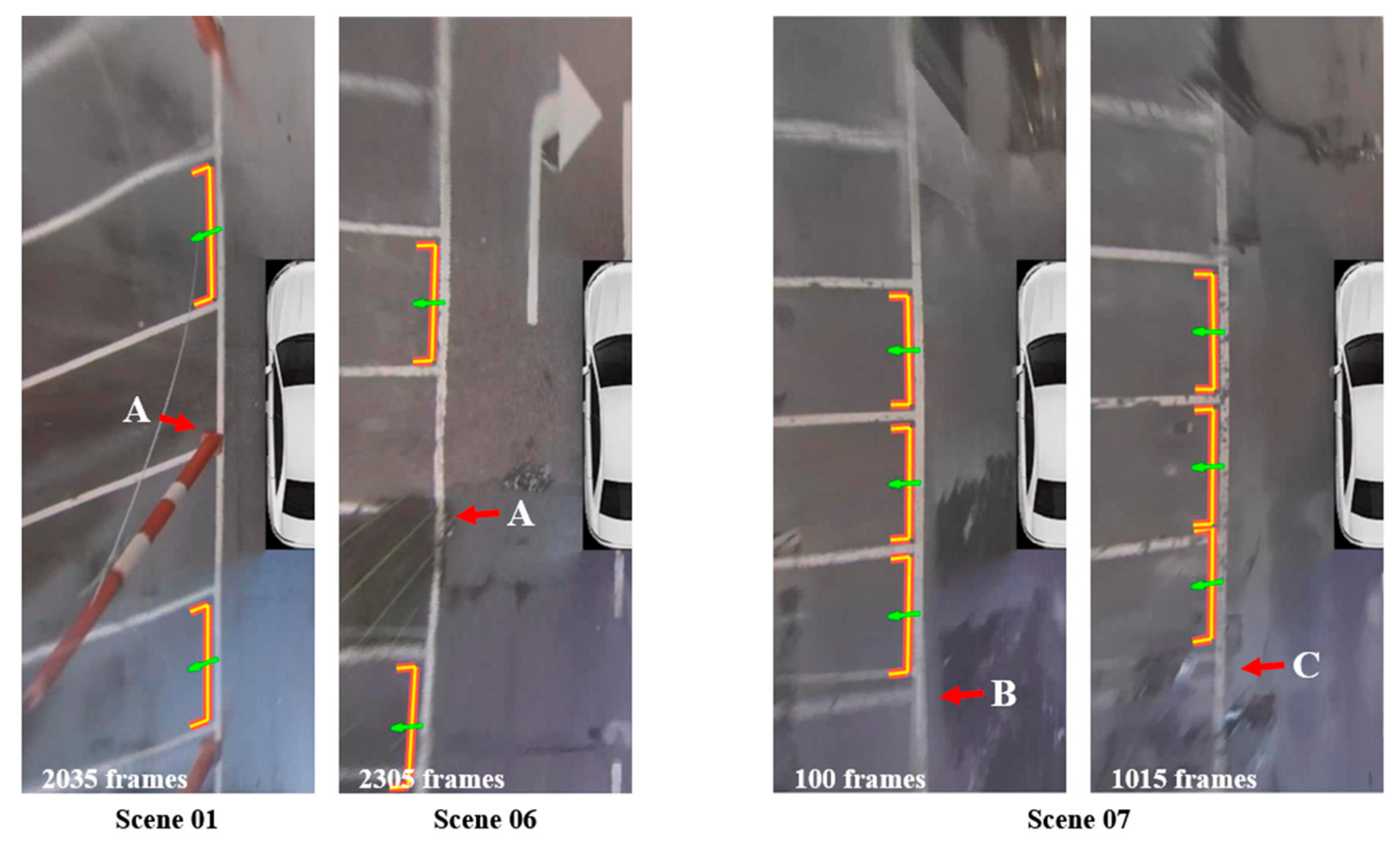
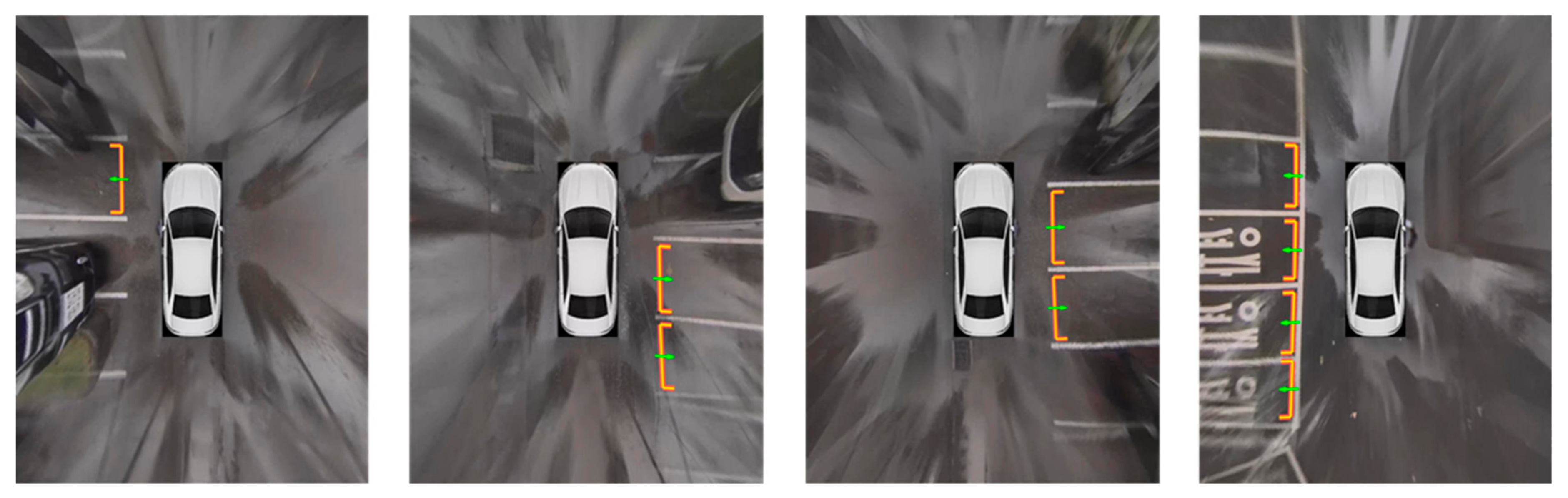
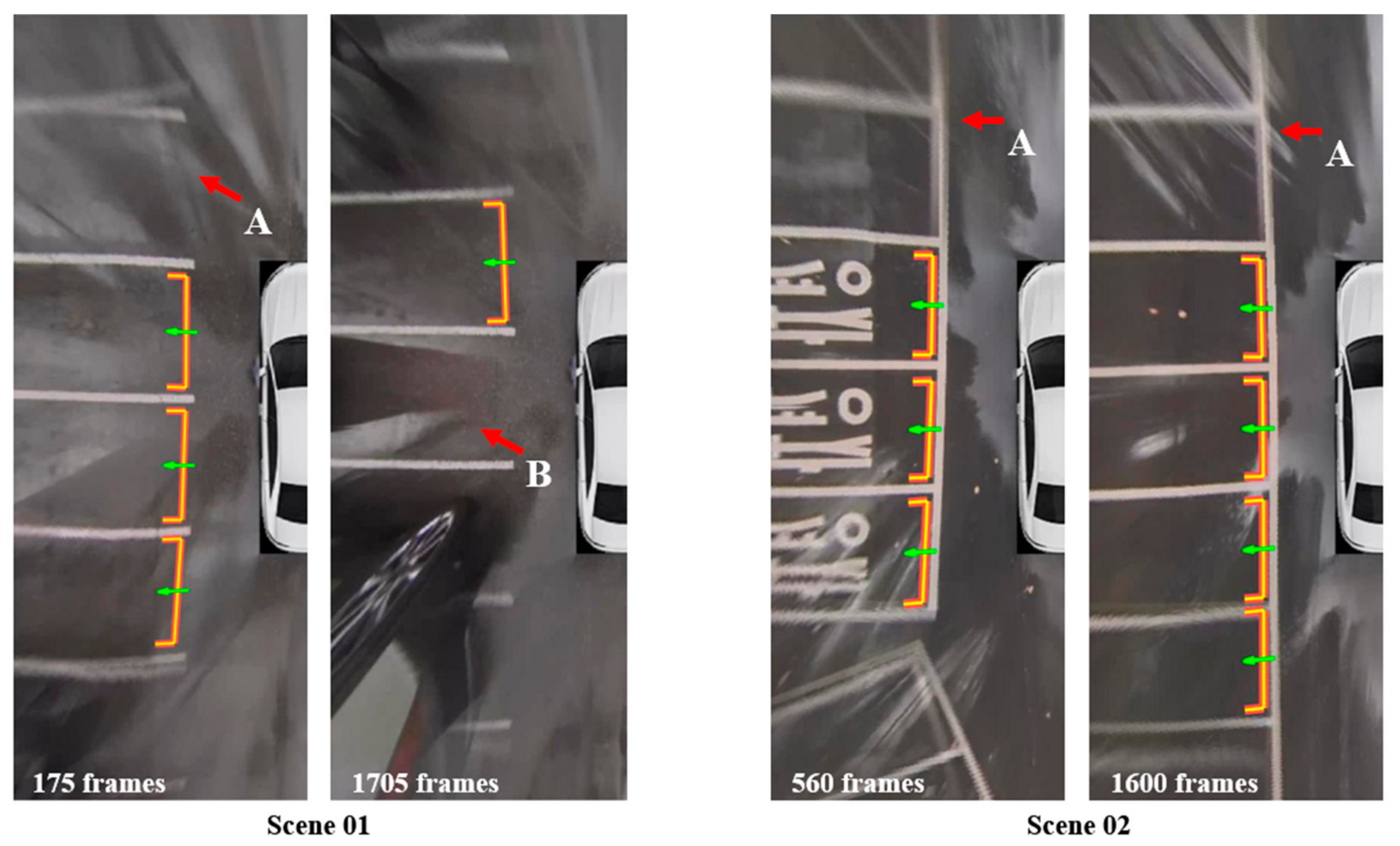
- The performance of the proposed method is evaluated through extensive experiments in different parking environments. The experimental results show that the proposed method can detect parking slots regardless of the weather changes and different shapes of the parking slot.
2. Related Work
2.1. Parking Slot Line Marking-Based Method
2.2. Parking Slot Marking Corner-Based Method
3. Proposed Method
3.1. System Overview
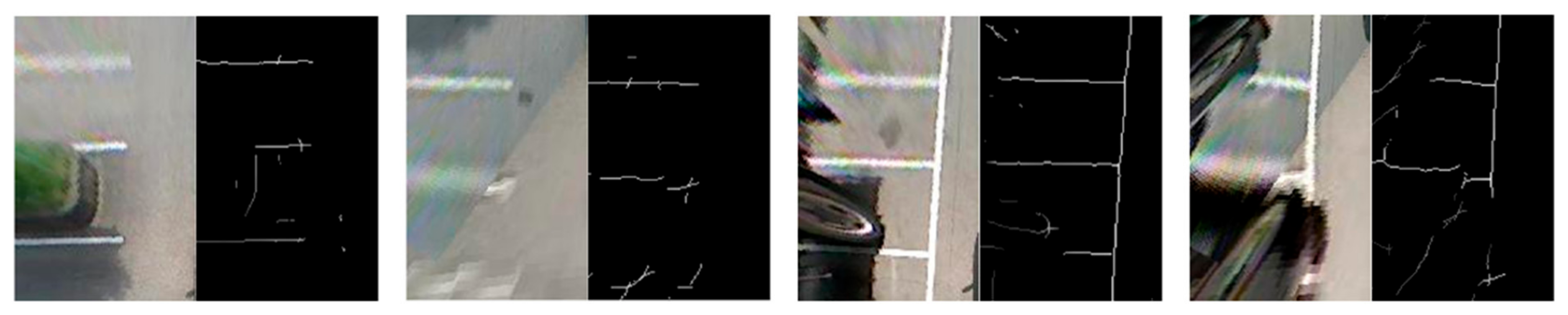
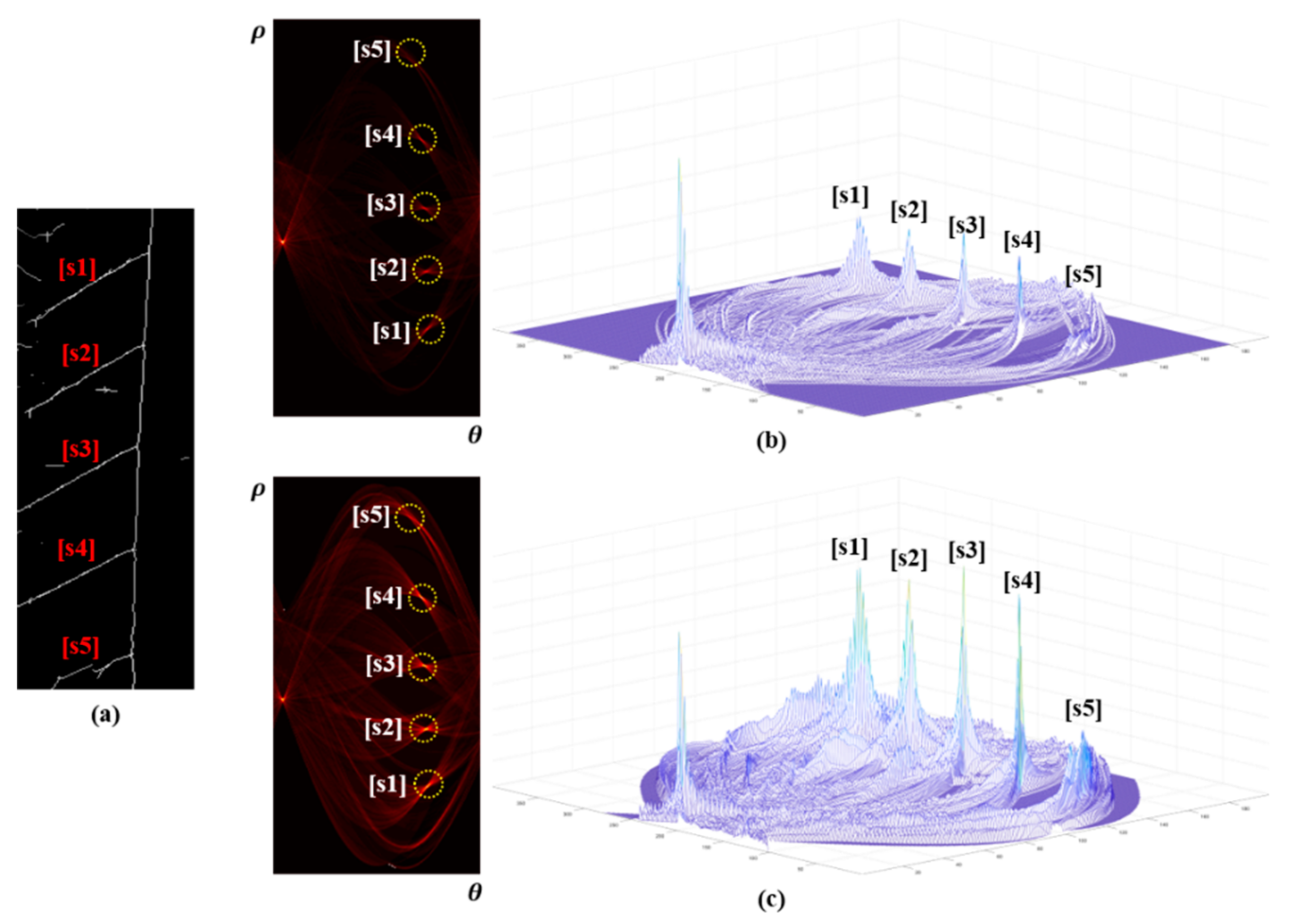
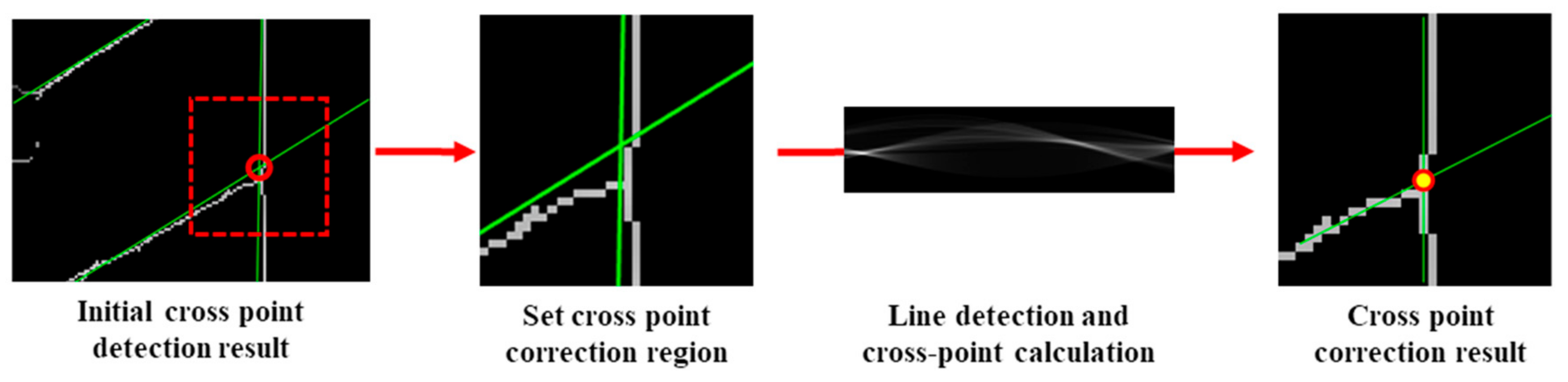
3.2. Parking Slot Line Detection
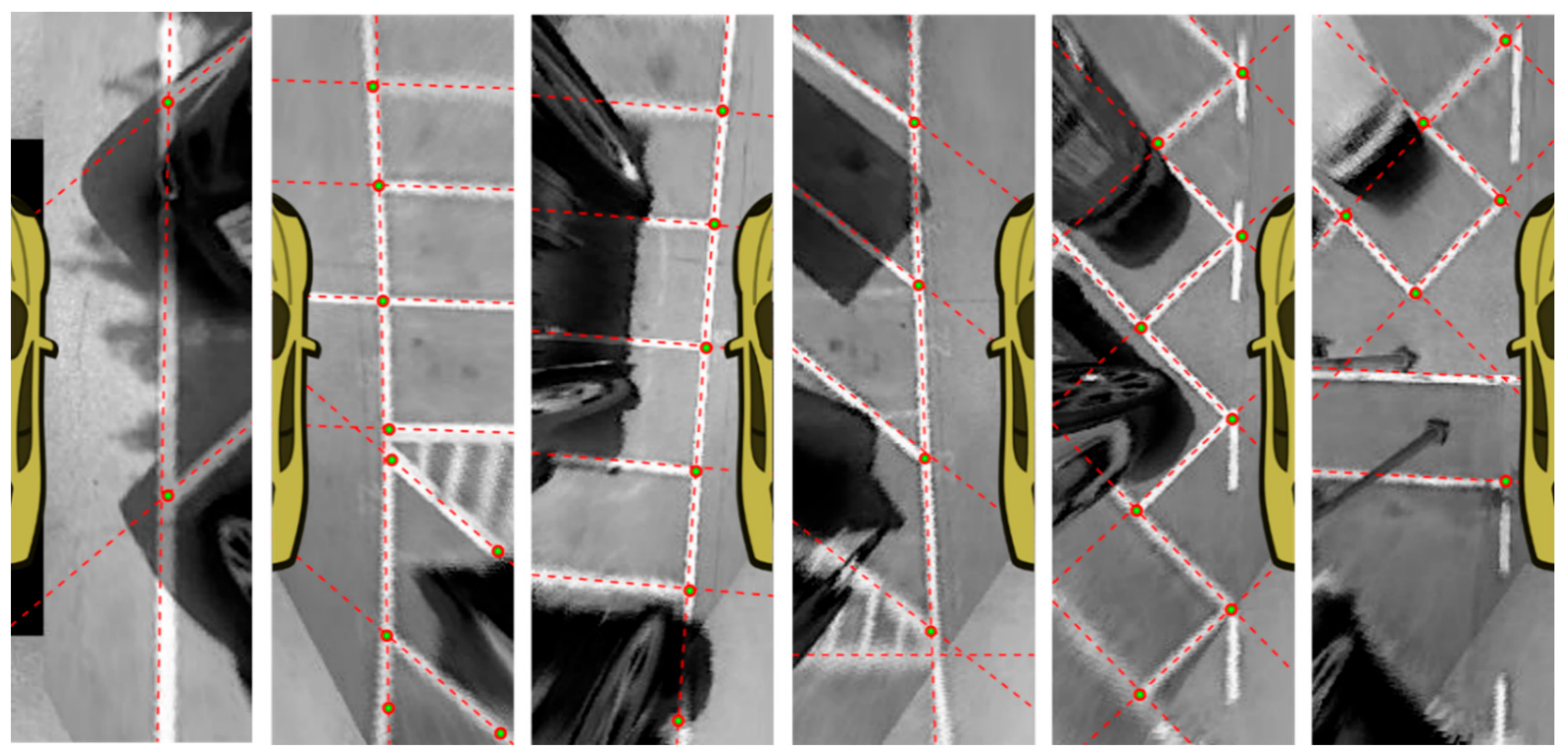
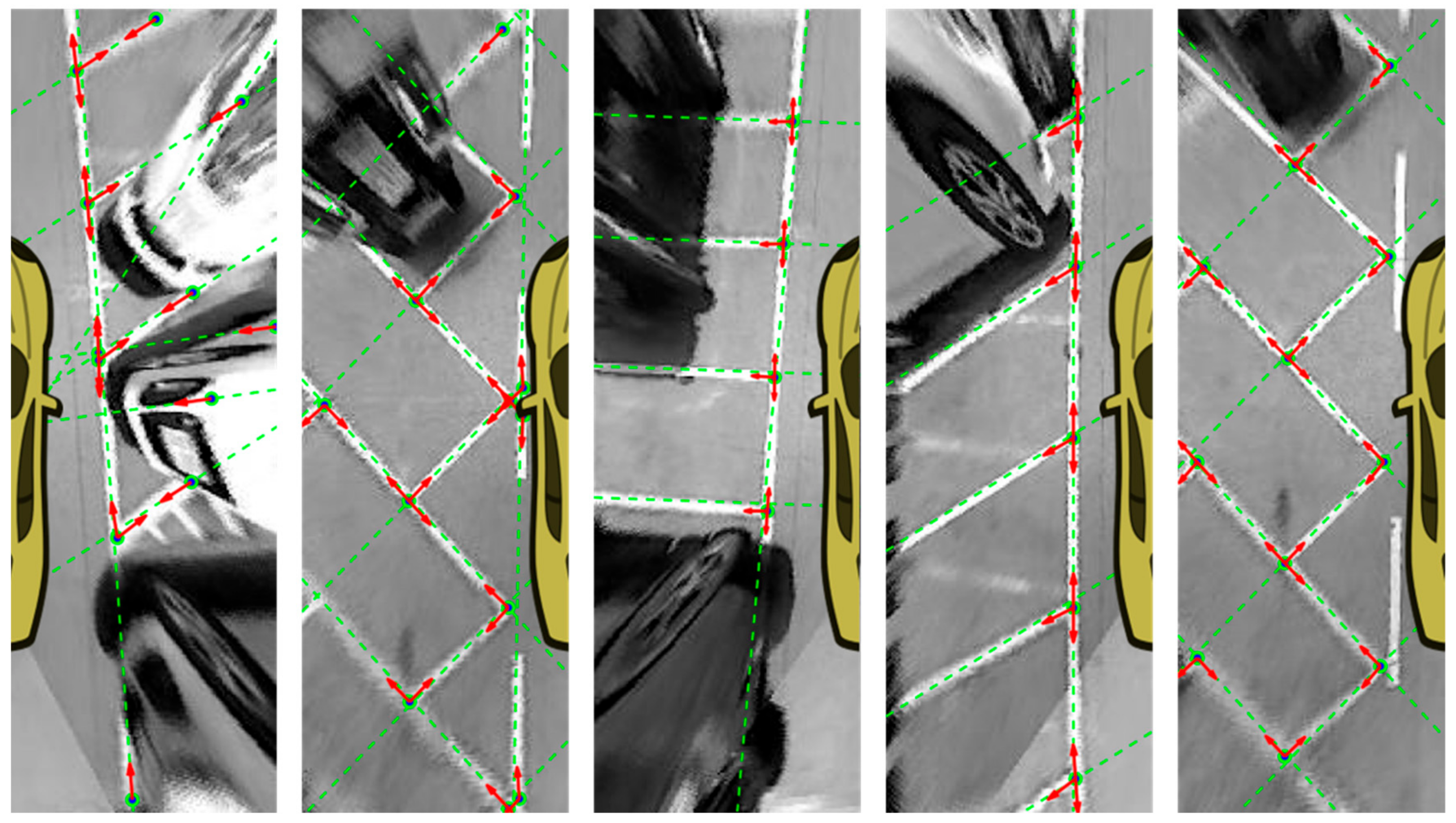
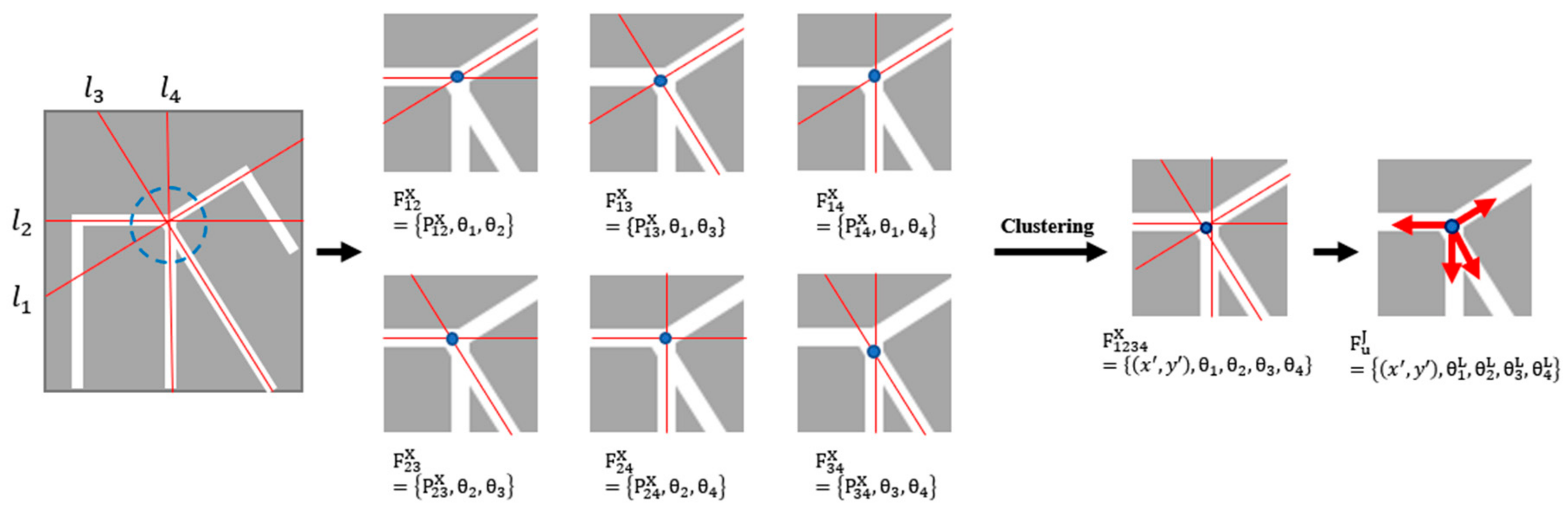
3.3. Free Junction Type Feature Extraction
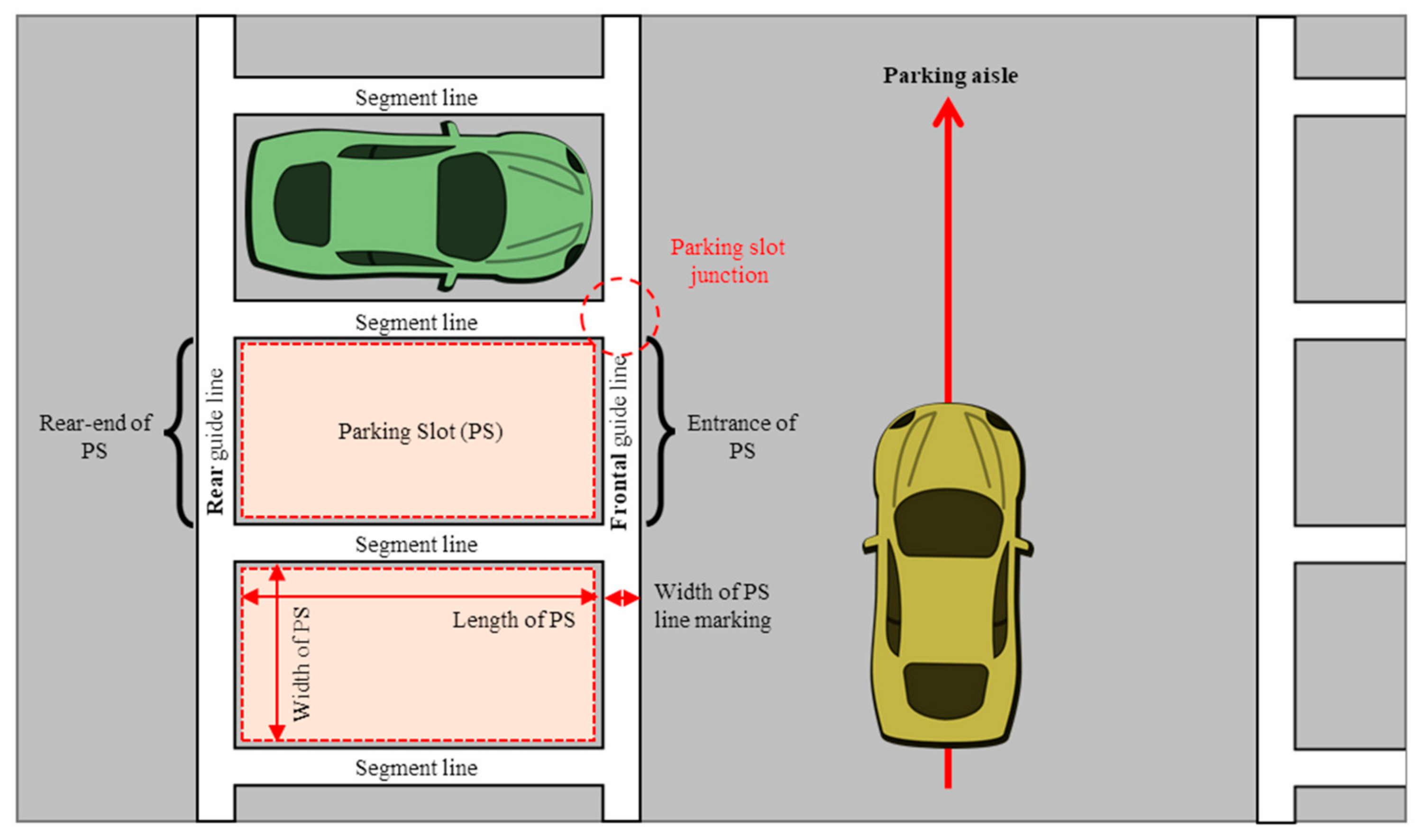
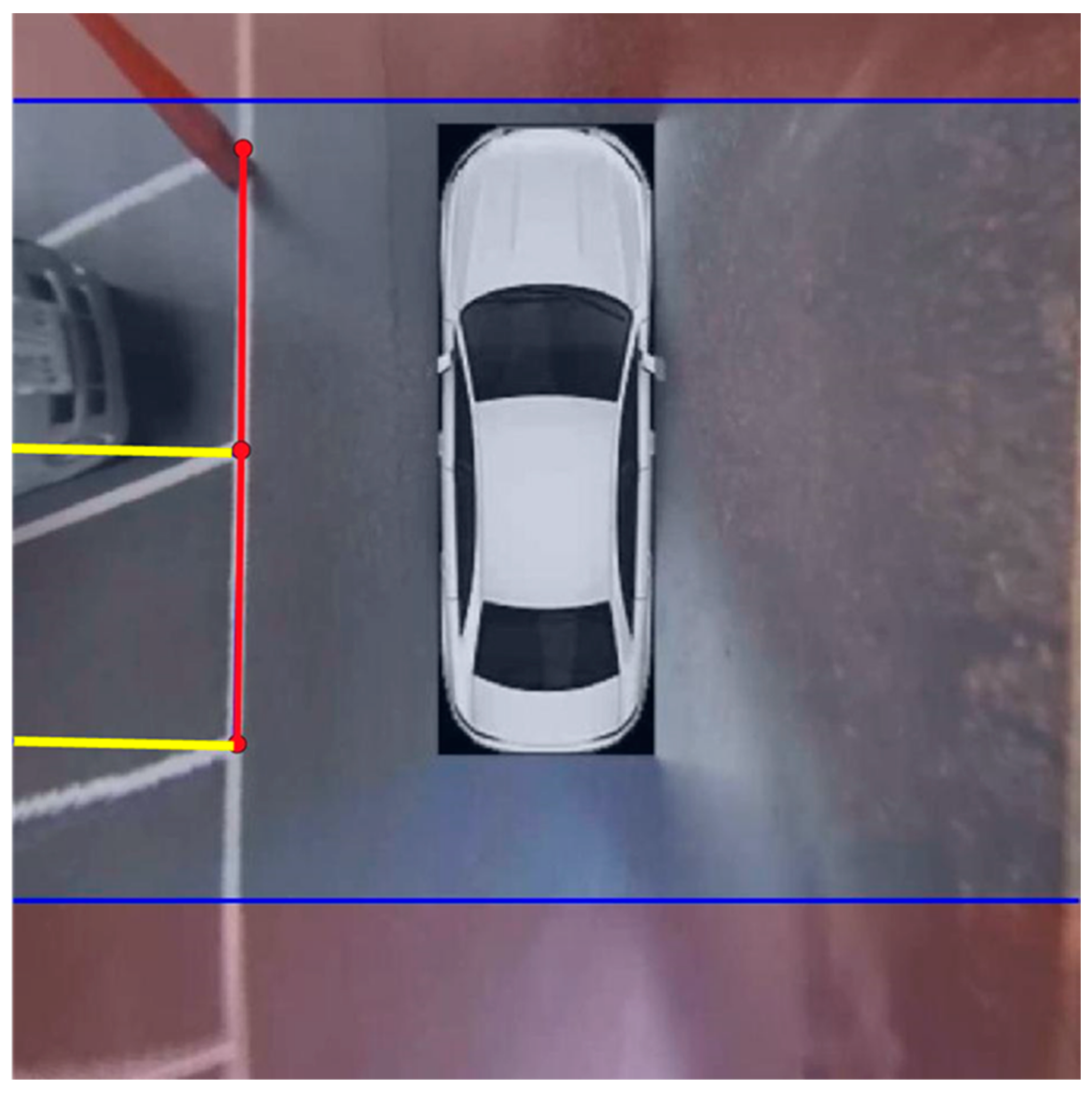
3.4. Parking Slot Entrance Generation
- Select two free junction type features, and .
- Remove the angle element having a direction facing each other for each and . The remaining set of angles is denoted as and .
- Pair angle elements having similar direction in and . In this process, the angle element whose direction is toward the vehicle is excluded.
- Calculate the length between and , and select the pair of free junction type features whose length is longer than the vehicle width.
- Define the parking slot entrance using the selected pair of free junction type features.
3.5. Vacant Parking Slot Classification
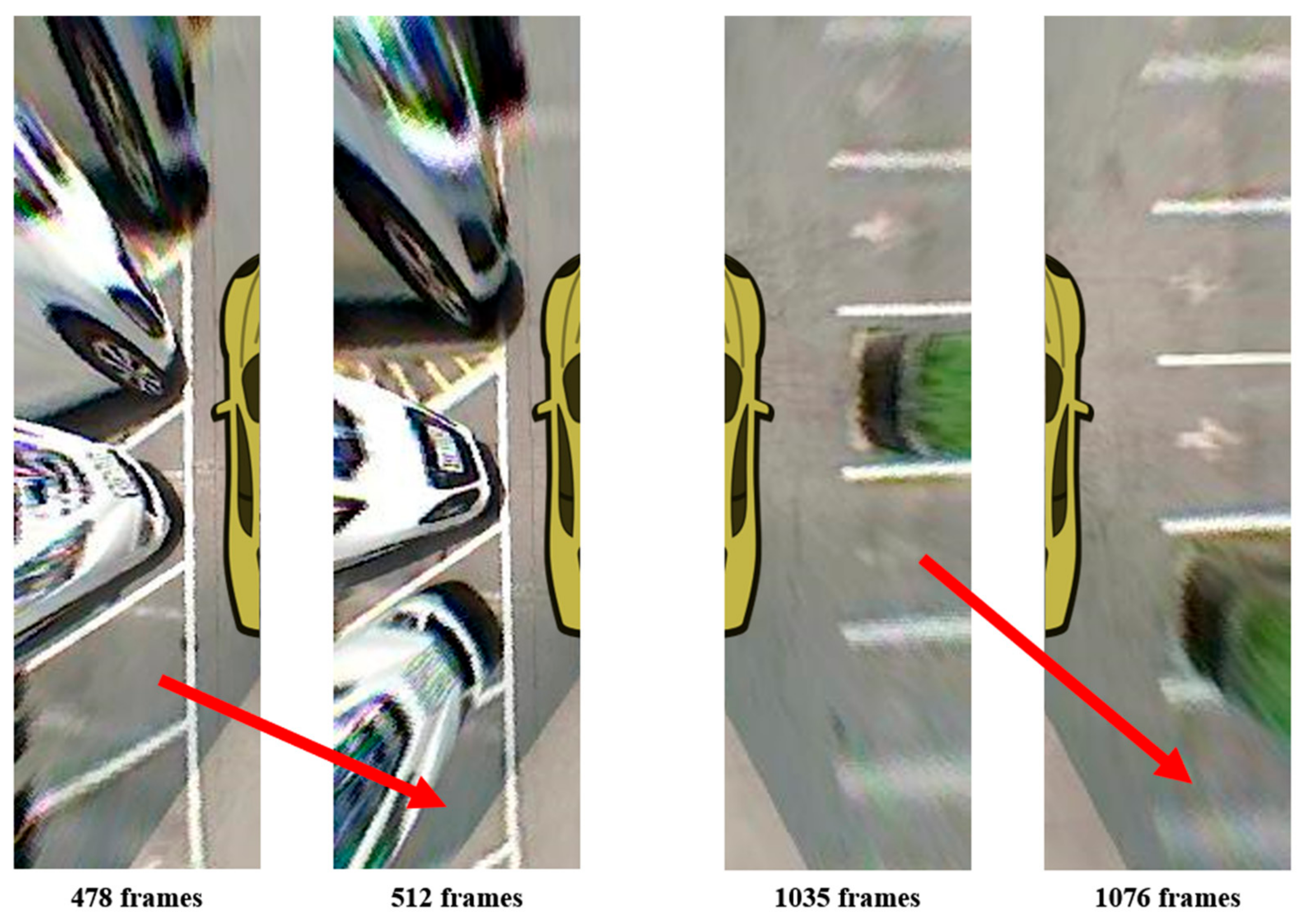
3.6. Multiple Parking Slot Tracking
3.7. Parking Slot Detection Implemental Details
4. Experimental Results
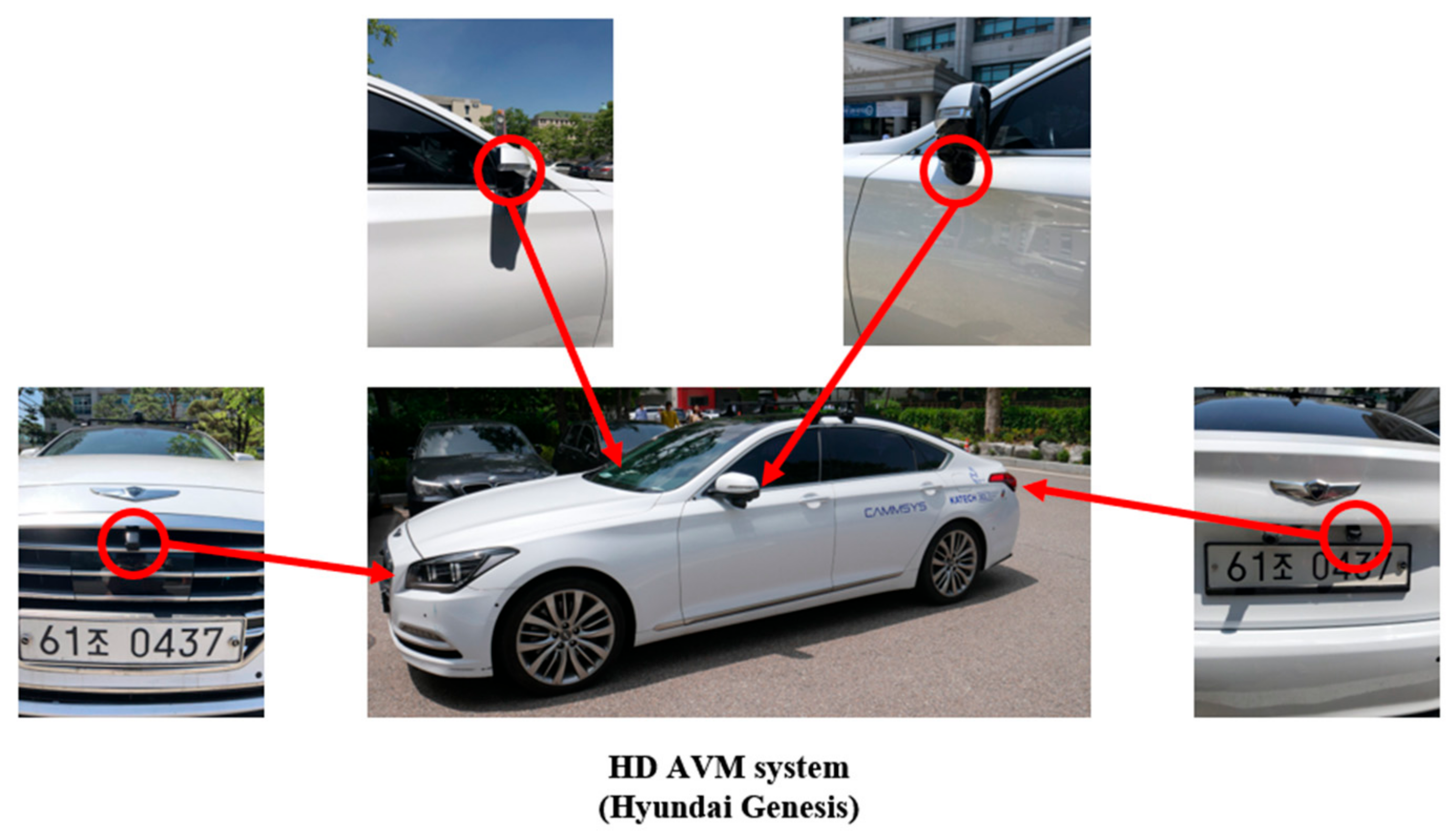
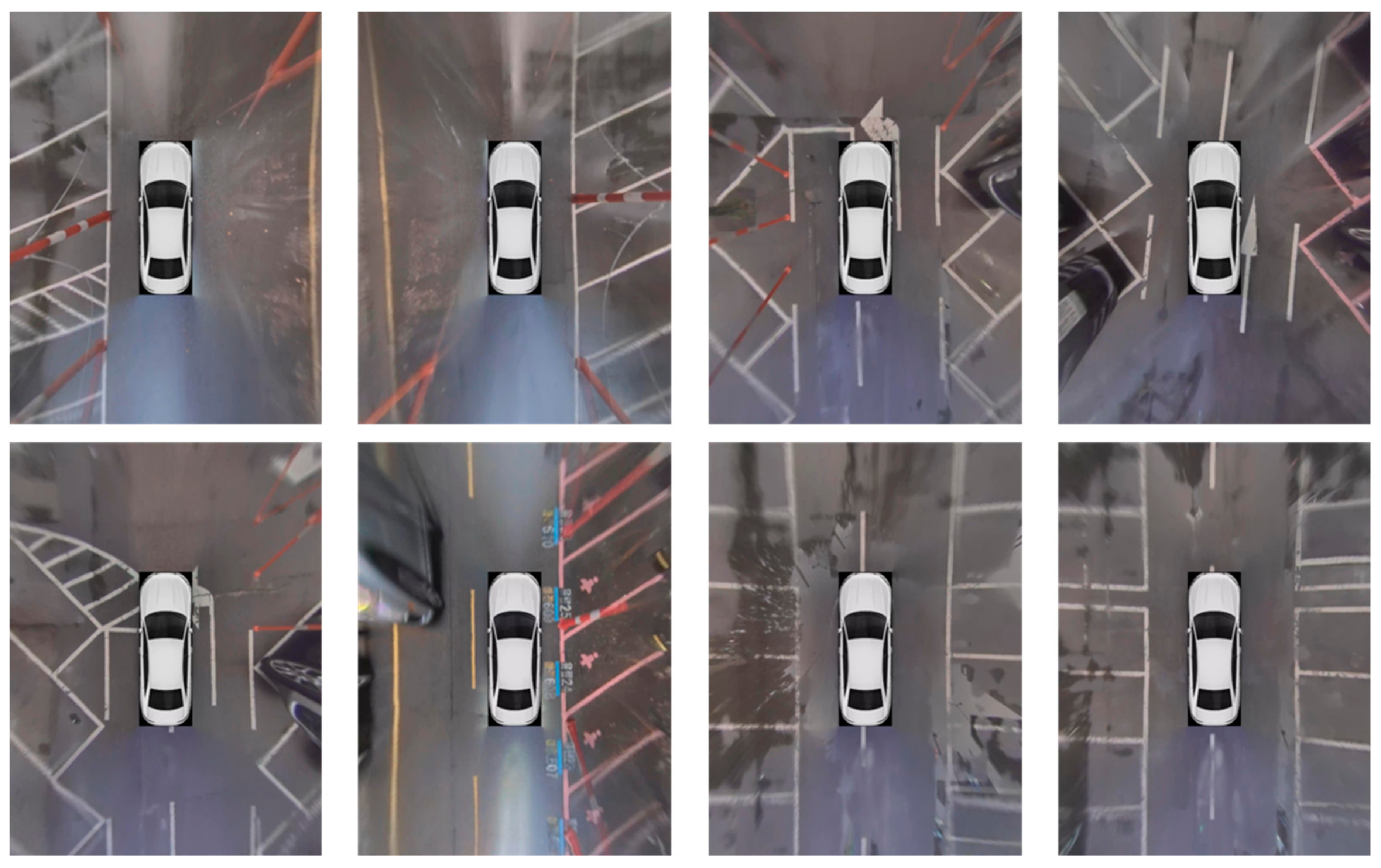
4.1. AVM Database
4.2. Parking Slot Detection Performance Evaluation
4.3. Comparative Experiment
5. Conclusions
Author Contributions
Funding
Conflicts of Interest
References
- Wikipedia Contributors. Intelligent Parking Assist System—Wikipedia, The Free Encyclopedia. 2020. Available online: https://en.wikipedia.org/wiki/Intelligent_Parking_Assist_System (accessed on 10 October 2020).
- Nardo, M.D.; Forino, D.; Murino, T. The evolution of man–machine interaction: The role of human in Industry 4.0 paradigm. Prod. Manuf. Res. 2020, 8, 20–34. [Google Scholar] [CrossRef] [Green Version]
- Tanaka, Y.; Saiki, M.; Katoh, M.; Endo, T. Development of image recognition for a parking assist system. In Proceedings of the 13th World Congress on Intelligent Transport Systems and Services, London, UK, 8–12 October 2006; pp. 1–7. [Google Scholar]
- Lee, S.; Hyeon, D.; Park, G.; Baek, I.J.; Kim, S.W.; Seo, S.W. Directional-DBSCAN: Parking-slot detection using a clustering method in around-view monitoring system. In Proceedings of the 2016 IEEE Intelligent Vehicles Symposium (IV), Gothenburg, Sweden, 19–22 June 2016; pp. 349–354. [Google Scholar]
- Du, X.; Tan, K.K. Autonomous reverse parking system based on robust path generation and improved sliding mode control. IEEE Trans. Intell. Transp. Syst. 2014, 16, 1225–1237. [Google Scholar] [CrossRef]
- Lee, S.; Seo, S.W. Available parking slot recognition based on slot context analysis. IET Intell. Transp. Syst. 2016, 10, 594–604. [Google Scholar] [CrossRef]
- Wang, C.; Zhang, H.; Yang, M.; Wang, X.; Ye, L.; Guo, C. Automatic parking based on a bird’s eye view vision system. Adv. Mech. Eng. 2014. [Google Scholar] [CrossRef]
- Houben, S.; Komar, M.; Hohm, A.; Lüke, S.; Neuhausen, M.; Schlipsing, M. On-vehicle video-based parking lot recognition with fisheye optics. In Proceedings of the 16th International IEEE Conference on Intelligent Transportation Systems (ITSC 2013), The Hague, The Netherlands, 6–9 October 2013; IEEE: Piscataway, NJ, USA, 2013; pp. 7–12. [Google Scholar]
- Allodi, M.; Castangia, L.; Cionini, A.; Valenti, F. Monocular parking slots and obstacles detection and tracking. In Proceedings of the 2016 IEEE Intelligent Vehicles Symposium (IV), Gothenburg, Sweden, 19–22 June 2016; pp. 179–185. [Google Scholar]
- Suhr, J.K.; Jung, H.G. Automatic Parking Space Detection and Tracking for Underground and Indoor Environments. IEEE Trans. Ind. Electron. 2016, 63, 5687–5698. [Google Scholar] [CrossRef]
- Suhr, J.K.; Jung, H.G. A universal vacant parking slot recognition system using sensors mounted on off-the-shelf vehicles. Sensors 2018, 18, 1213. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Hamada, K.; Hu, Z.; Fan, M.; Chen, H. Surround view based parking lot detection and tracking. In Proceedings of the 2015 IEEE Intelligent Vehicles Symposium (IV), Seoul, Korea, 28 June–1 July 2015; IEEE: Piscataway, NJ, USA, 2015; pp. 1106–1111. [Google Scholar]
- Jung, H.G.; Kim, D.S.; Yoon, P.J.; Kim, J. Parking Slot Markings Recognition for Automatic Parking Assist System. In Proceedings of the 2006 IEEE Intelligent Vehicles Symposium, Tokyo, Japan, 13–15 June 2006. [Google Scholar]
- Jung, H.G.; Lee, Y.H.; Kim, J. Uniform user interface for semiautomatic parking slot marking recognition. IEEE Trans. Veh. Technol. 2009, 59, 616–626. [Google Scholar] [CrossRef]
- Suhr, J.K.; Jung, H.G. Full-automatic recognition of various parking slot markings using a hierarchical tree structure. Opt. Eng. 2013, 52, 037203. [Google Scholar] [CrossRef]
- Li, L.; Zhang, L.; Li, X.; Liu, X.; Shen, Y.; Xiong, L. Vision-based parking-slot detection: A benchmark and a learning-based approach. In Proceedings of the 2017 IEEE International Conference on Multimedia and Expo (ICME), Hong Kong, China, 10–14 July 2017; IEEE: Piscataway, NJ, USA, 2017; pp. 649–654. [Google Scholar]
- Fan, M.; Hu, Z.; Hamada, K.; Chen, H. Line Filter-Based Parking Slot Detection for Intelligent Parking Assistance System. In Proceedings of the SAE-China Congress 2014: Selected Papers; Springer: Berlin/Heidelberg, Germany, 2015; pp. 175–181. [Google Scholar]
- Radon, J. On the determination of functions from their integral values along certain manifolds. IEEE Trans. Med. Imaging 1986, 5, 170–176. [Google Scholar] [CrossRef] [PubMed]
- Kong, T.Y.; Rosenfeld, A. Topological Algorithms for Digital Image Processing; Elsevier: Amsterdam, The Netherlands, 1996. [Google Scholar]
- Cortes, C.; Vapnik, V. Support-vector networks. Mach. Learn. 1995, 20, 273–297. [Google Scholar] [CrossRef]
- Ra, M.; Jung, H.G.; Suhr, J.K.; Kim, W.Y. Part-based vehicle detection in side-rectilinear images for blind-spot detection. Expert Syst. Appl. 2018, 101, 116–128. [Google Scholar] [CrossRef]
- Welch, G.; Bishop, G. An Introduction to the Kalman Filter; University of North Carolina at Chapel Hill: Chapel Hill, NC, USA, 2001. [Google Scholar]































{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Cross Point of Parking Slot Line | End Point of Parking Slot Line | |
|---|---|---|
| Is there a frontal guide line? | Yes | No |
| Is there a line segment? | Yes | Yes |
| Junction location | Cross location between the frontal guide line and line segment | End location of the line segment |
| Examples |  |  |
| Scenarios | Number of Frames | Number of Frames Used for Test | |
|---|---|---|---|
| Sunny | Scene 1 | 1155 | 47 |
| Scene 2 | 1355 | 56 | |
| Scene 3 | 1955 | 80 | |
| Scene 4 | 1505 | 61 | |
| Scene 5 | 1080 | 44 | |
| Scene 6 | 1755 | 71 | |
| Scene 7 | 2105 | 85 | |
| Scene 8 | 2105 | 85 | |
| Scene 9 | 3905 | 157 | |
| Scene 10 | 3755 | 151 | |
| Scene 11 | 1505 | 61 | |
| Scene 12 | 1955 | 79 | |
| Scene 13 | 2705 | 109 | |
| Cloudy | Scene 1 | 2305 | 93 |
| Scene 2 | 2505 | 103 | |
| Scene 3 | 980 | 40 | |
| Scene 4 | 2405 | 97 | |
| Scene 5 | 2105 | 85 | |
| Scene 6 | 2355 | 95 | |
| Scene 7 | 2105 | 85 | |
| Scene 8 | 4610 | 191 | |
| Rainy | Scene 1 | 2005 | 82 |
| Scene 2 | 1955 | 79 | |
| Total | 50,170 | 2036 | |
| Dataset | Number of Vacant Parking Slots | Number of Detected Parking Slots | Number of Correctly Classified Parking Slots | Precision (%) | Recall (%) | PS Distance Error (cm) |
|---|---|---|---|---|---|---|
| Scene 01 | 62 | 61 | 60 | 98.36 | 96.77 | 7.48 |
| Scene 02 | 53 | 43 | 41 | 95.35 | 77.36 | 7.48 |
| Scene 03 | 143 | 142 | 139 | 97.89 | 97.20 | 2.65 |
| Scene 04 | 100 | 100 | 99 | 99.00 | 99.00 | 1.34 |
| Scene 05 | 77 | 76 | 76 | 100.00 | 98.70 | 3.02 |
| Scene 06 | 102 | 103 | 101 | 98.06 | 99.02 | 2.55 |
| Scene 07 | 140 | 140 | 137 | 97.86 | 97.86 | 2.57 |
| Scene 08 | 72 | 70 | 69 | 98.57 | 95.83 | 2.60 |
| Scene 09 | 256 | 246 | 244 | 99.19 | 95.31 | 2.38 |
| Scene 10 | 250 | 270 | 250 | 92.59 | 100.00 | 1.38 |
| Scene 11 | 88 | 89 | 87 | 97.75 | 98.86 | 2.23 |
| Scene 12 | 72 | 73 | 72 | 98.63 | 100.00 | 1.85 |
| Scene 13 | 89 | 90 | 89 | 98.89 | 100.00 | 3.27 |
| TOTAL | 1504 | 1503 | 1464 | 97.41 | 97.34 | 3.14 |
| Dataset | Number of Vacant Parking Slots | Number of Detected Parking Slots | Number of Correctly Classified Parking Slots | Precision (%) | Recall (%) | PS Distance Error (cm) |
|---|---|---|---|---|---|---|
| Scene 01 | 137 | 129 | 123 | 95.35 | 89.78 | 3.14 |
| Scene 02 | 148 | 149 | 141 | 94.63 | 95.27 | 2.67 |
| Scene 03 | 56 | 57 | 56 | 98.25 | 100.00 | 3.47 |
| Scene 04 | 176 | 184 | 172 | 93.48 | 97.73 | 3.41 |
| Scene 05 | 143 | 141 | 136 | 96.45 | 95.10 | 3.38 |
| Scene 06 | 155 | 137 | 134 | 97.81 | 86.45 | 2.68 |
| Scene 07 | 153 | 159 | 143 | 89.94 | 93.46 | 5.11 |
| Scene 08 | 258 | 233 | 228 | 97.85 | 88.37 | 3.87 |
| TOTAL | 1226 | 1189 | 1133 | 95.29 | 92.41 | 3.47 |
| Dataset | Number of Vacant Parking Slots | Number of Detected Parking Slots | Number of Correctly Classified Parking Slots | Precision (%) | Recall (%) | PS Distance Error (cm) |
|---|---|---|---|---|---|---|
| Scene 01 | 81 | 72 | 71 | 98.61 | 87.65 | 2.44 |
| Scene 02 | 164 | 151 | 147 | 97.35 | 89.63 | 2.51 |
| TOTAL | 245 | 223 | 218 | 97.76 | 88.98 | 2.48 |
| Scenarios | Proposed | Li et al. [16] | |||
|---|---|---|---|---|---|
| Precision (%) | Recall (%) | Precision (%) | Recall (%) | ||
| Daylight | Scene 1 | 98.36 | 96.77 | 0 | 0 |
| Scene 2 | 95.35 | 77.36 | 0 | 0 | |
| Scene 3 | 97.89 | 97.20 | 0 | 0 | |
| Scene 4 | 99.00 | 99.00 | 0 | 0 | |
| Scene 5 | 100.00 | 98.70 | 0 | 0 | |
| Scene 6 | 98.06 | 99.02 | 100.00 | 100.00 | |
| Scene 7 | 97.86 | 97.86 | 100.00 | 100.00 | |
| Scene 8 | 98.57 | 95.83 | 99.01 | 98.57 | |
| Scene 9 | 99.19 | 95.31 | 100 | 100 | |
| Scene 10 | 92.59 | 100.00 | 0 | 0 | |
| Scene 11 | 97.75 | 98.86 | 100.00 | 98.25 | |
| Scene 12 | 98.63 | 100.00 | 100.00 | 100.00 | |
| Scene 13 | 98.89 | 100.00 | 0 | 0 | |
| Cloudy | Scene 1 | 95.35 | 89.78 | 0 | 0 |
| Scene 2 | 94.63 | 95.27 | 0 | 0 | |
| Scene 3 | 98.25 | 100.00 | 0 | 0 | |
| Scene 4 | 93.48 | 97.73 | 100.00 | 97.11 | |
| Scene 5 | 96.45 | 95.10 | 100.00 | 97.06 | |
| Scene 6 | 97.81 | 86.45 | 100.00 | 95.33 | |
| Scene 7 | 89.94 | 93.46 | 97.01 | 89.04 | |
| Scene 8 | 97.85 | 88.37 | 0 | 0 | |
| Rain | Scene 1 | 98.61 | 87.65 | 0 | 0 |
| Scene 2 | 97.35 | 89.63 | 100.00 | 98.77 | |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2020 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Kim, S.; Kim, J.; Ra, M.; Kim, W.-Y. Vacant Parking Slot Recognition Method for Practical Autonomous Valet Parking System Using around View Image. Symmetry 2020, 12, 1725. https://doi.org/10.3390/sym12101725
Kim S, Kim J, Ra M, Kim W-Y. Vacant Parking Slot Recognition Method for Practical Autonomous Valet Parking System Using around View Image. Symmetry. 2020; 12(10):1725. https://doi.org/10.3390/sym12101725
Chicago/Turabian StyleKim, Seunghyun, Joongsik Kim, Moonsoo Ra, and Whoi-Yul Kim. 2020. "Vacant Parking Slot Recognition Method for Practical Autonomous Valet Parking System Using around View Image" Symmetry 12, no. 10: 1725. https://doi.org/10.3390/sym12101725
APA StyleKim, S., Kim, J., Ra, M., & Kim, W. -Y. (2020). Vacant Parking Slot Recognition Method for Practical Autonomous Valet Parking System Using around View Image. Symmetry, 12(10), 1725. https://doi.org/10.3390/sym12101725