Parametric Model for Kitchen Product Based on Cubic T-Bézier Curves with Symmetry


{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
Abstract
:1. Introduction
2. Cubic T-Bézier Curve
2.1. The Definition of Cubic T-Bézier Curve
2.2. Geometric Continuity Conditions for Cubic T-Bézier Curves
2.2.1. , Continuity Conditions for Cubic T-Bézier Curves
2.2.2. Example of , Smooth Continuity between Two Cubic T-Bézier Curves
3. Kitchen Cabinet Countertop Design with the T-Bézier Model
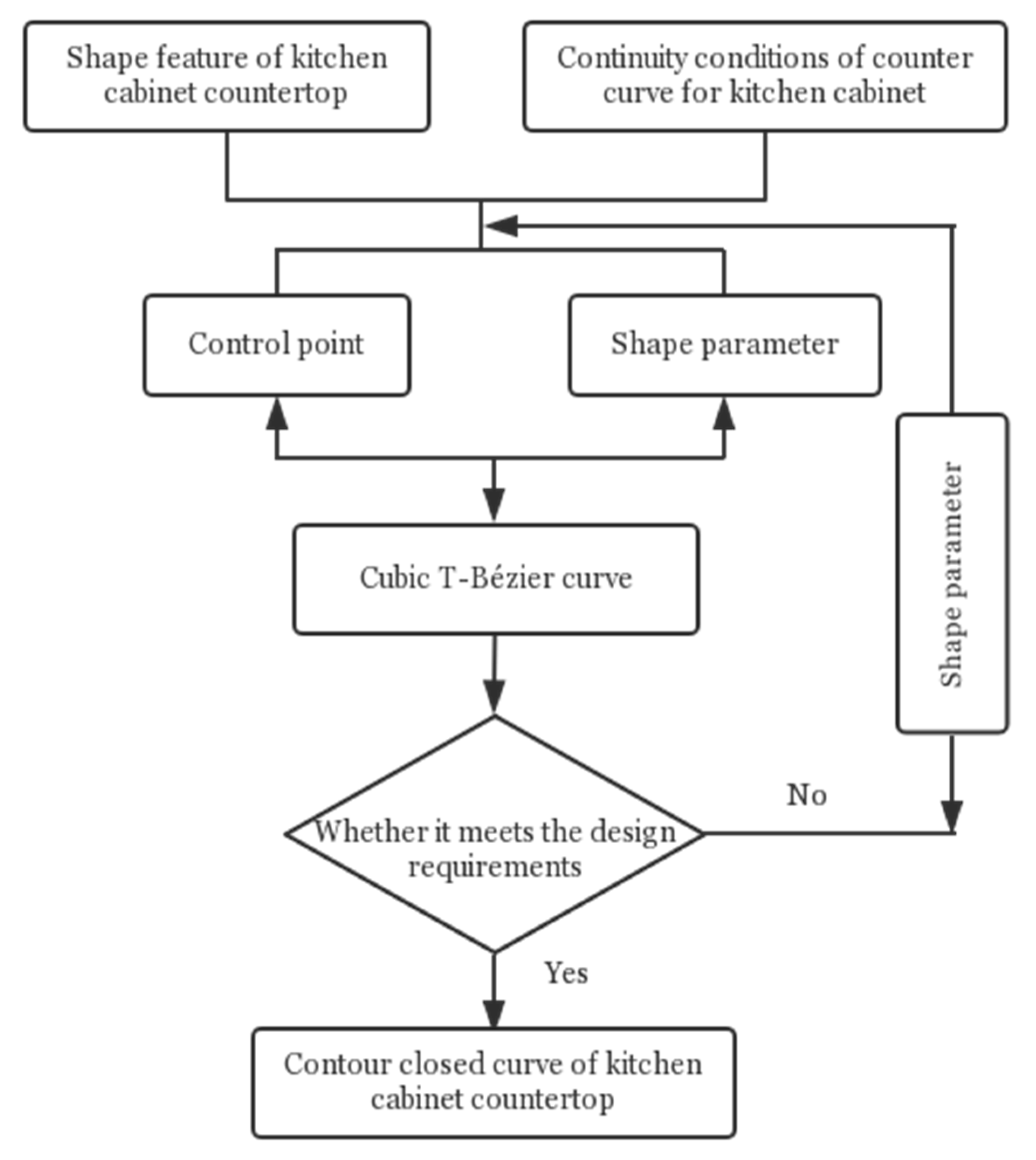
3.1. Construction of Contour Closed Curve of Kitchen Cabinet Countertop
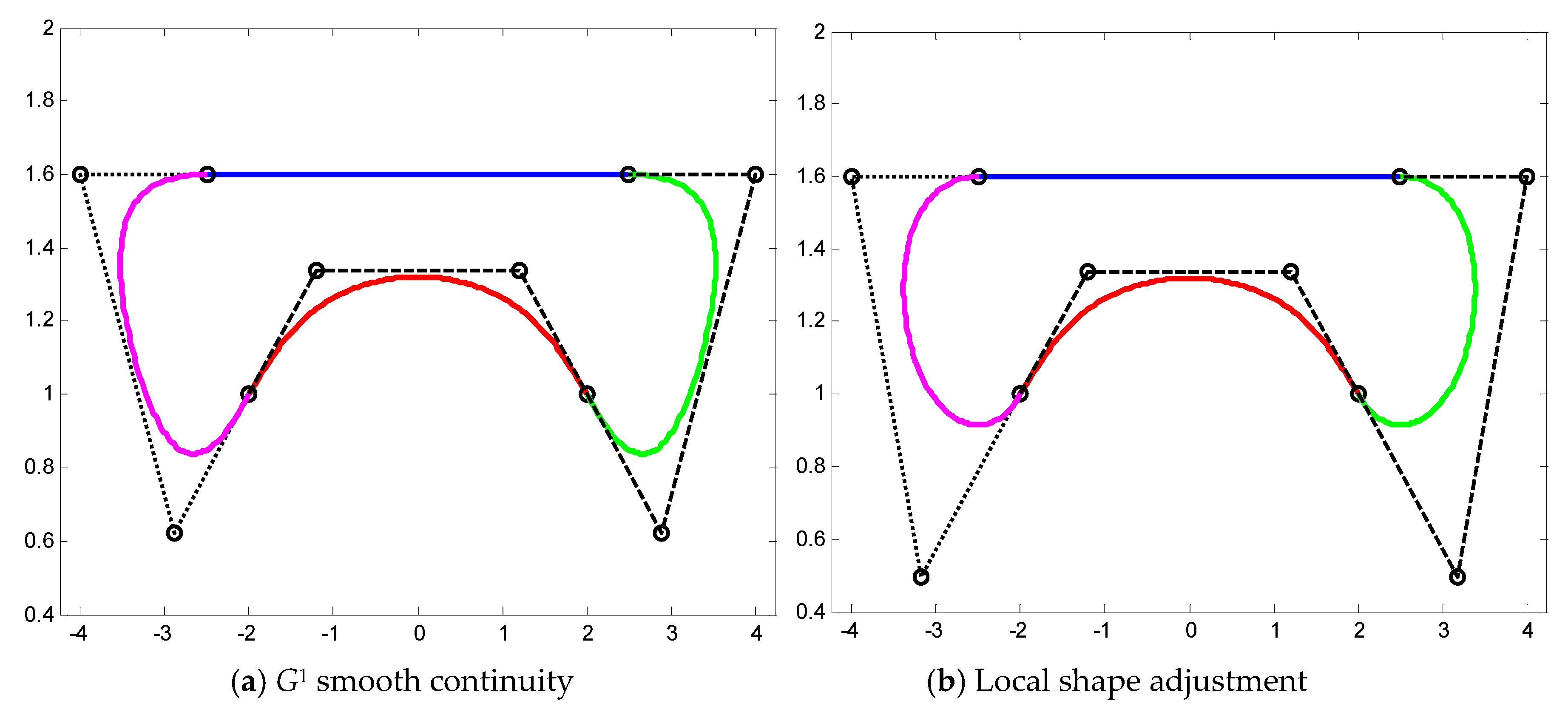
3.1.1. The Contour Closed Curve of Kitchen Cabinet Countertop of G1 Continuity
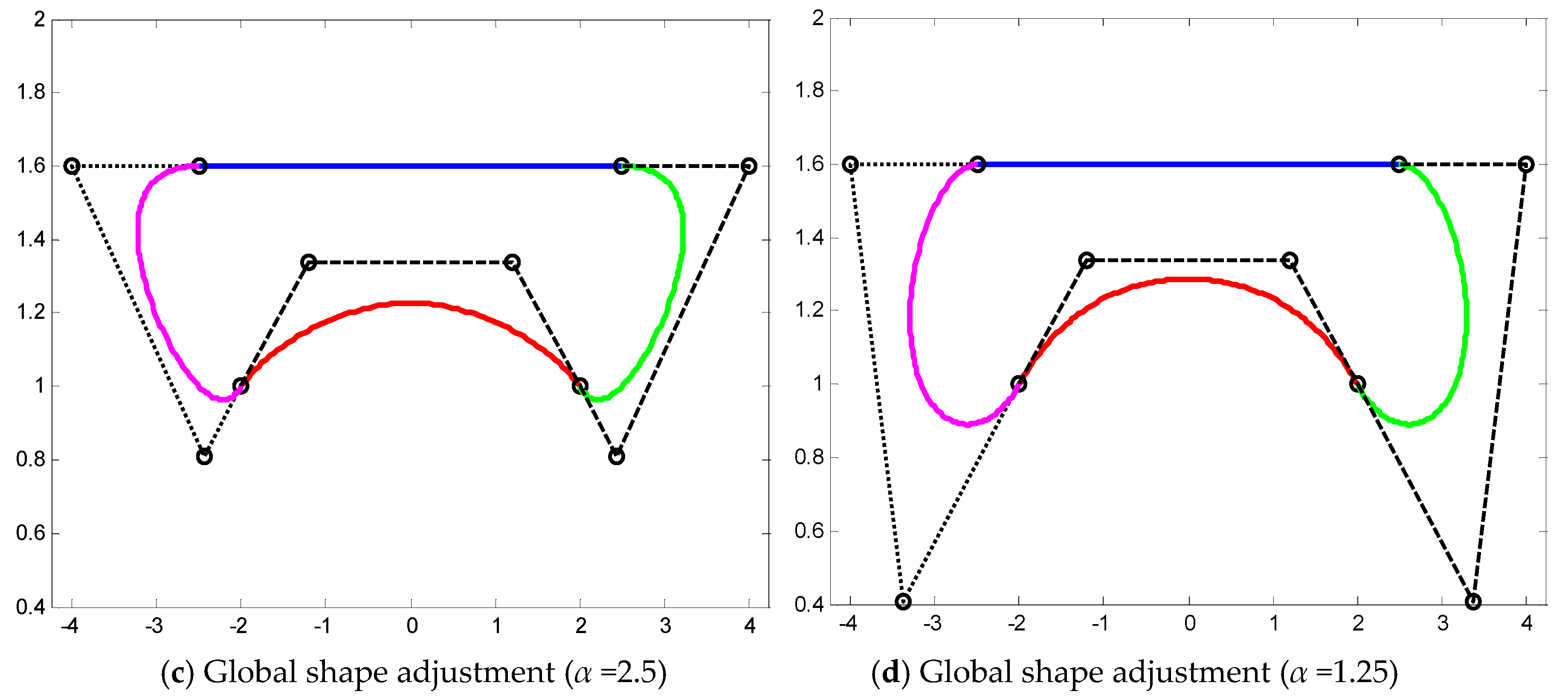
3.1.2. The Contour Closed Curve of Kitchen Cabinet Countertop of G2 Continuity
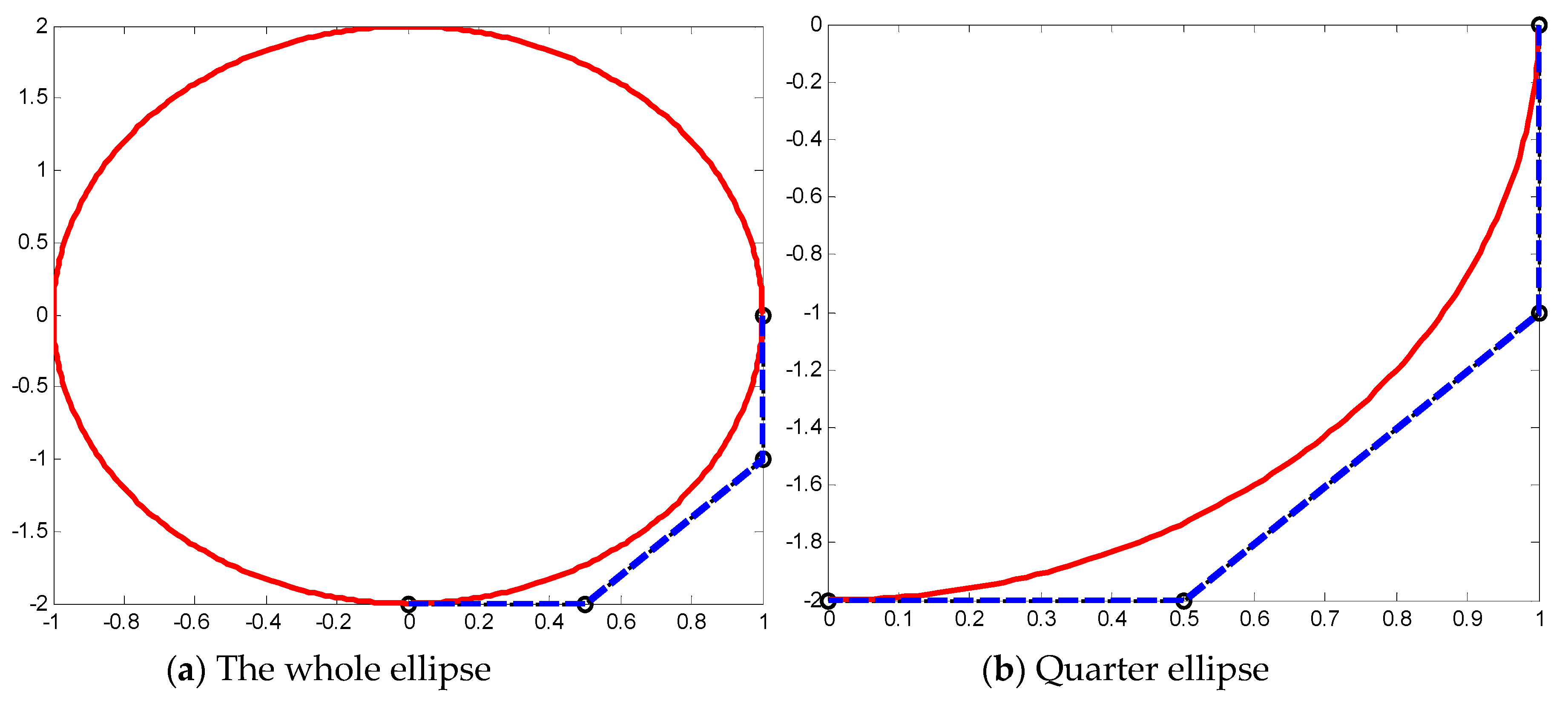
3.2. The Representation of Ellipses with Cubic T-Bézier Curves
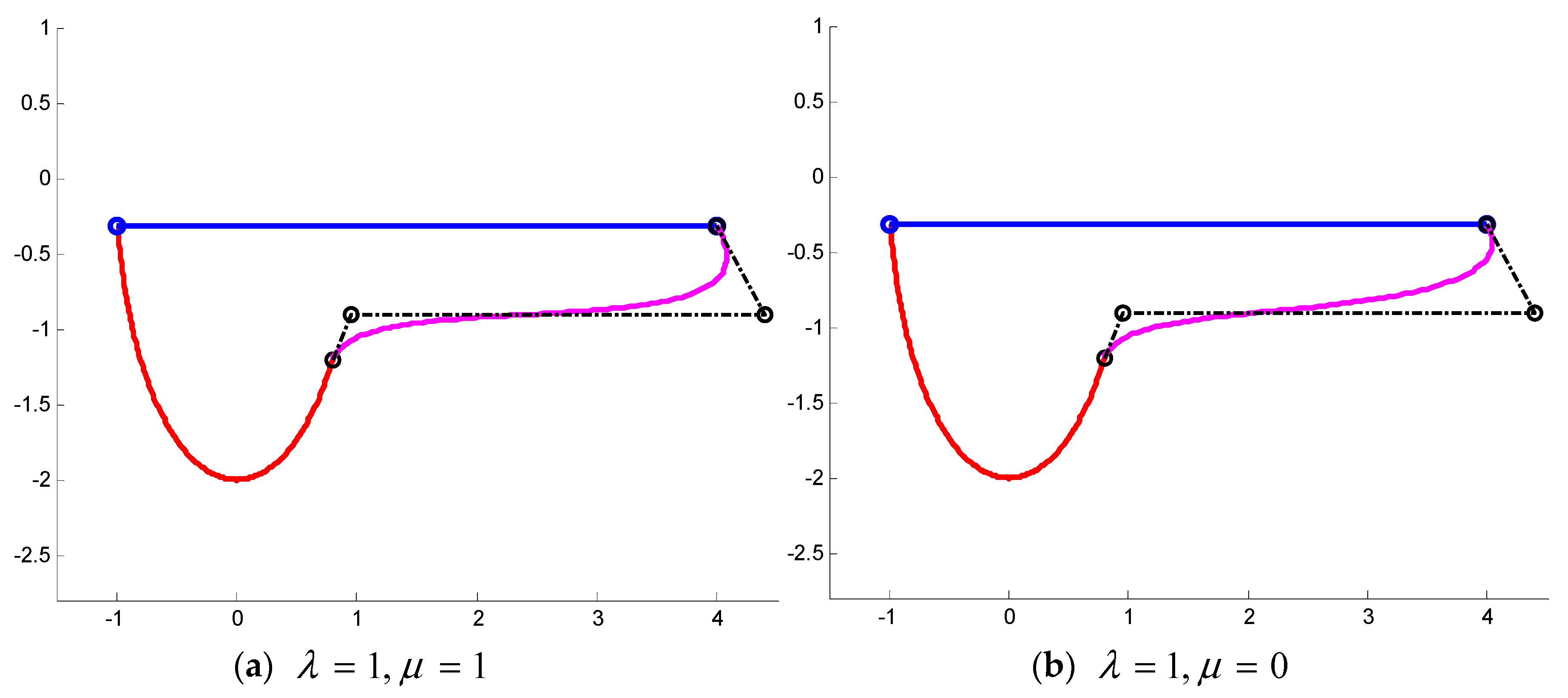
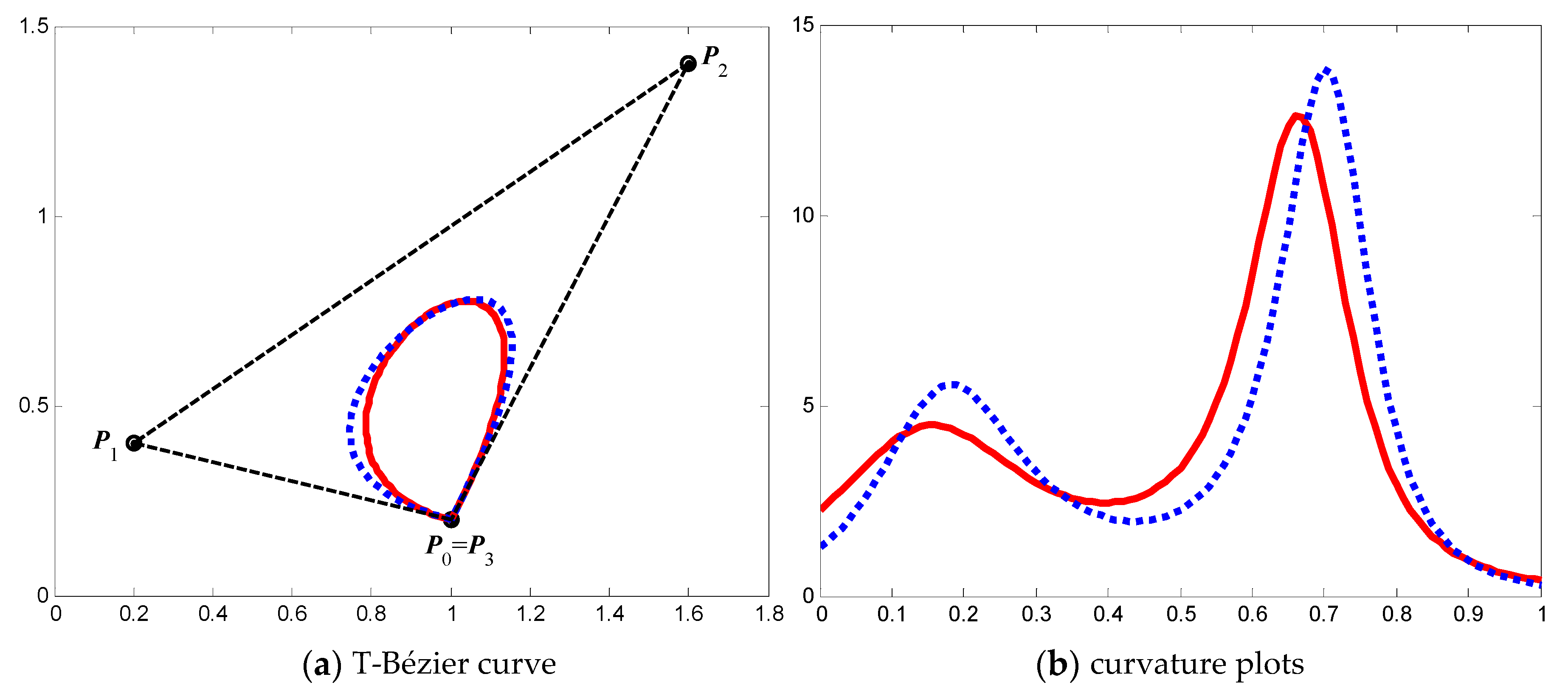
3.3. Shape Optimization of Cubic T-Bézier Curves
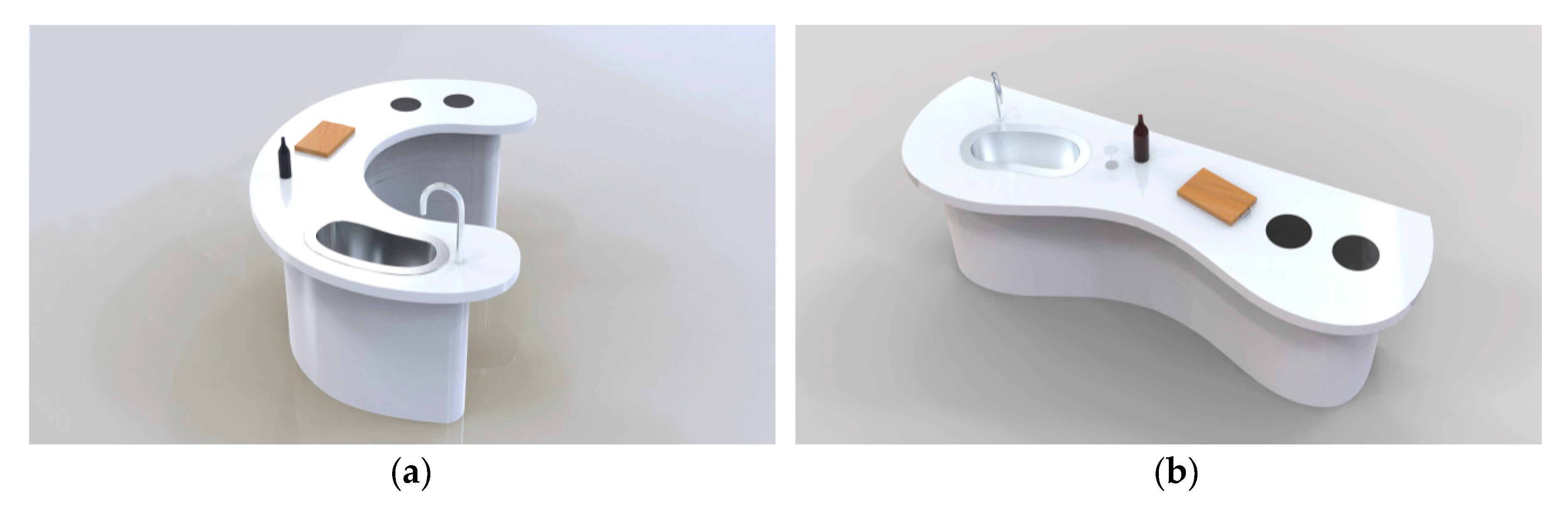
4. Examples of Kitchen Cabinet Design
5. Conclusions
- (1)
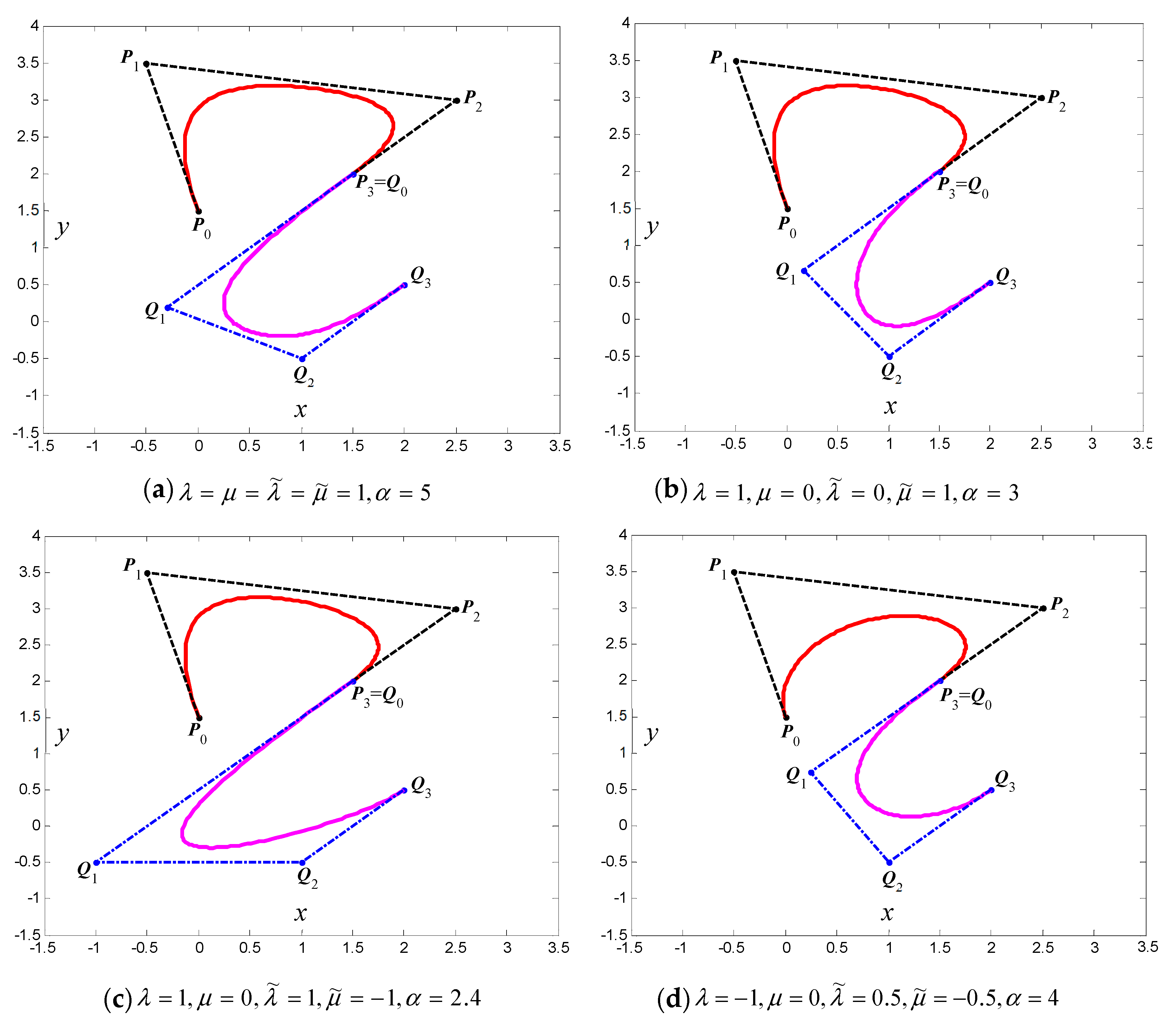
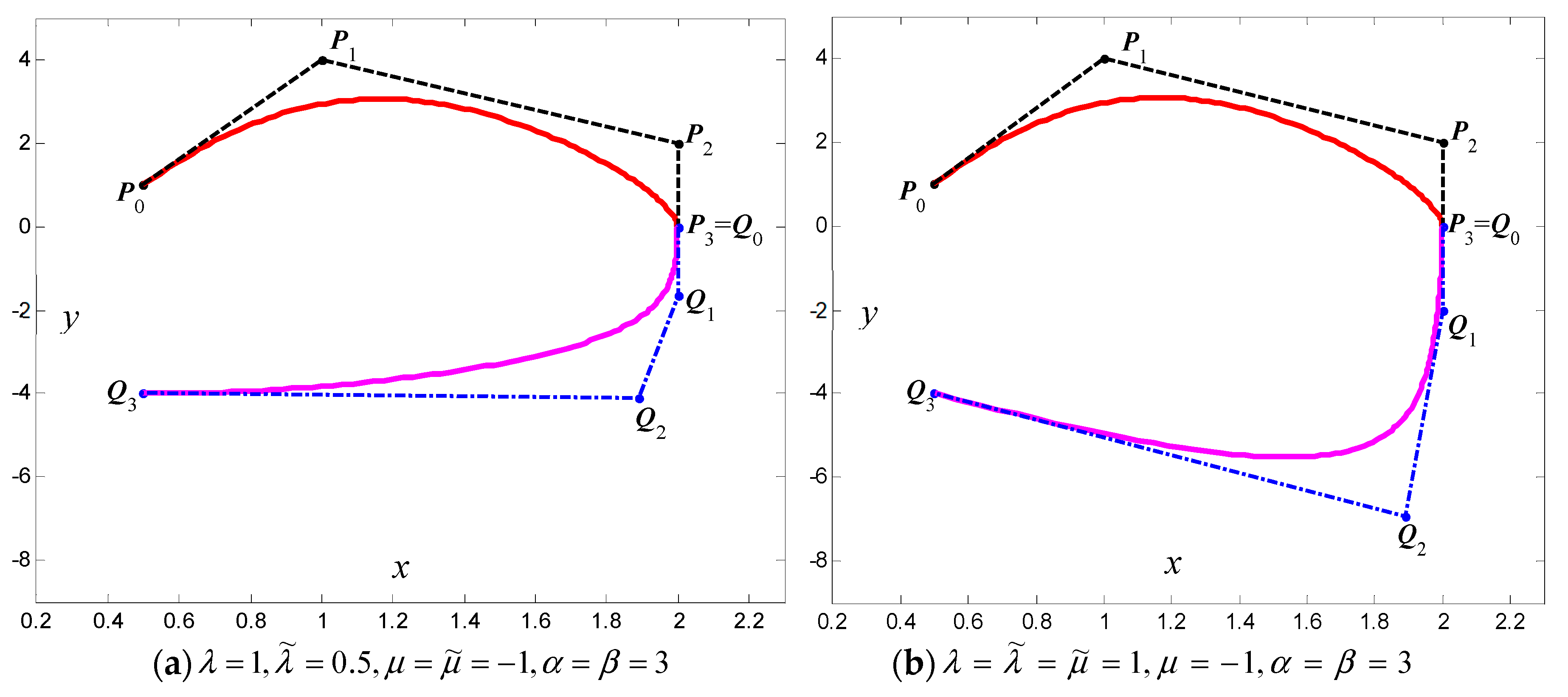
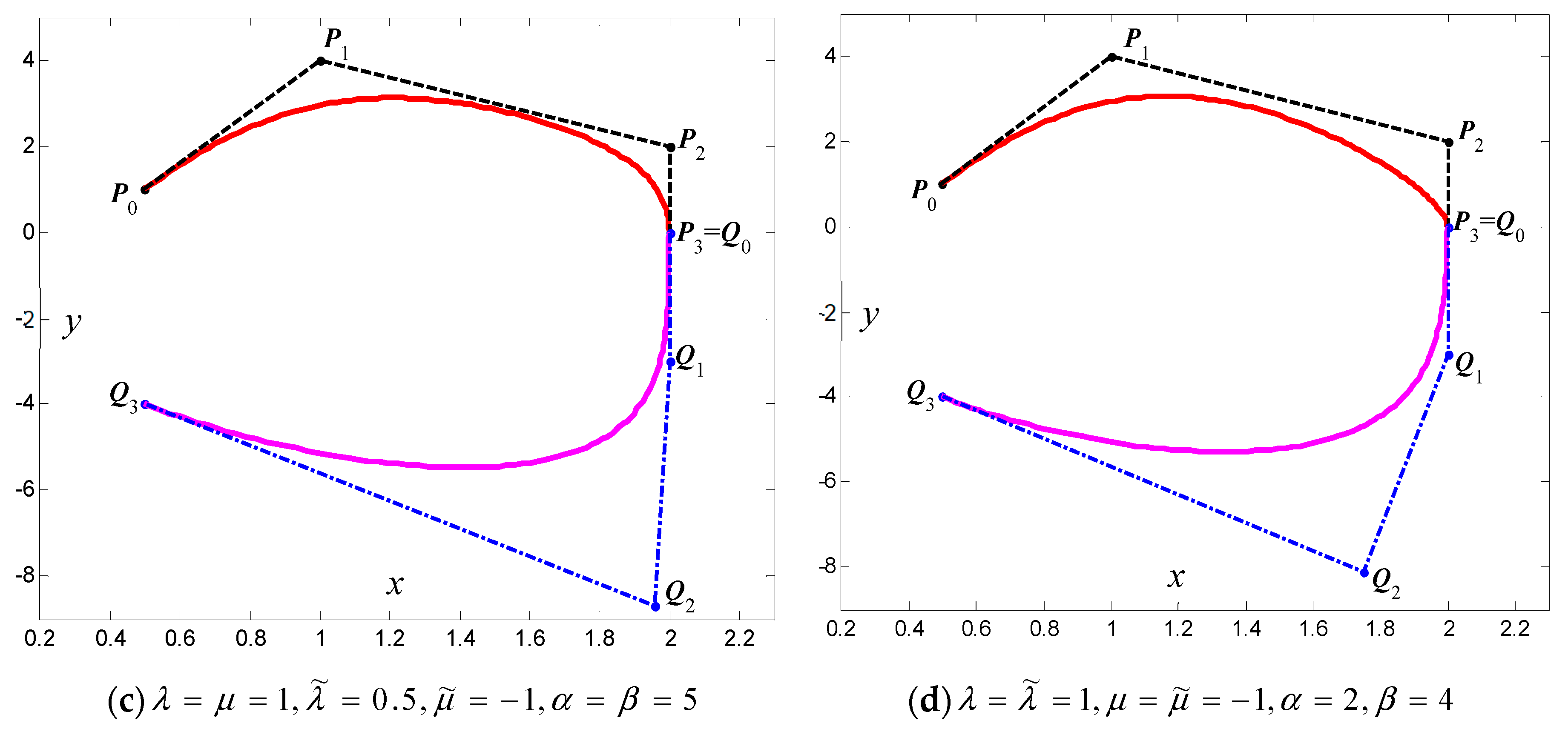
- Our proposed G1 and G2 continuity conditions for cubic T-Bézier curves extend the conclusions of continuity condition given in [25]; the closed composite cubic T-Bézier curves have a more powerful shape adjustability than the classical composite Bézier curves.
- (2)
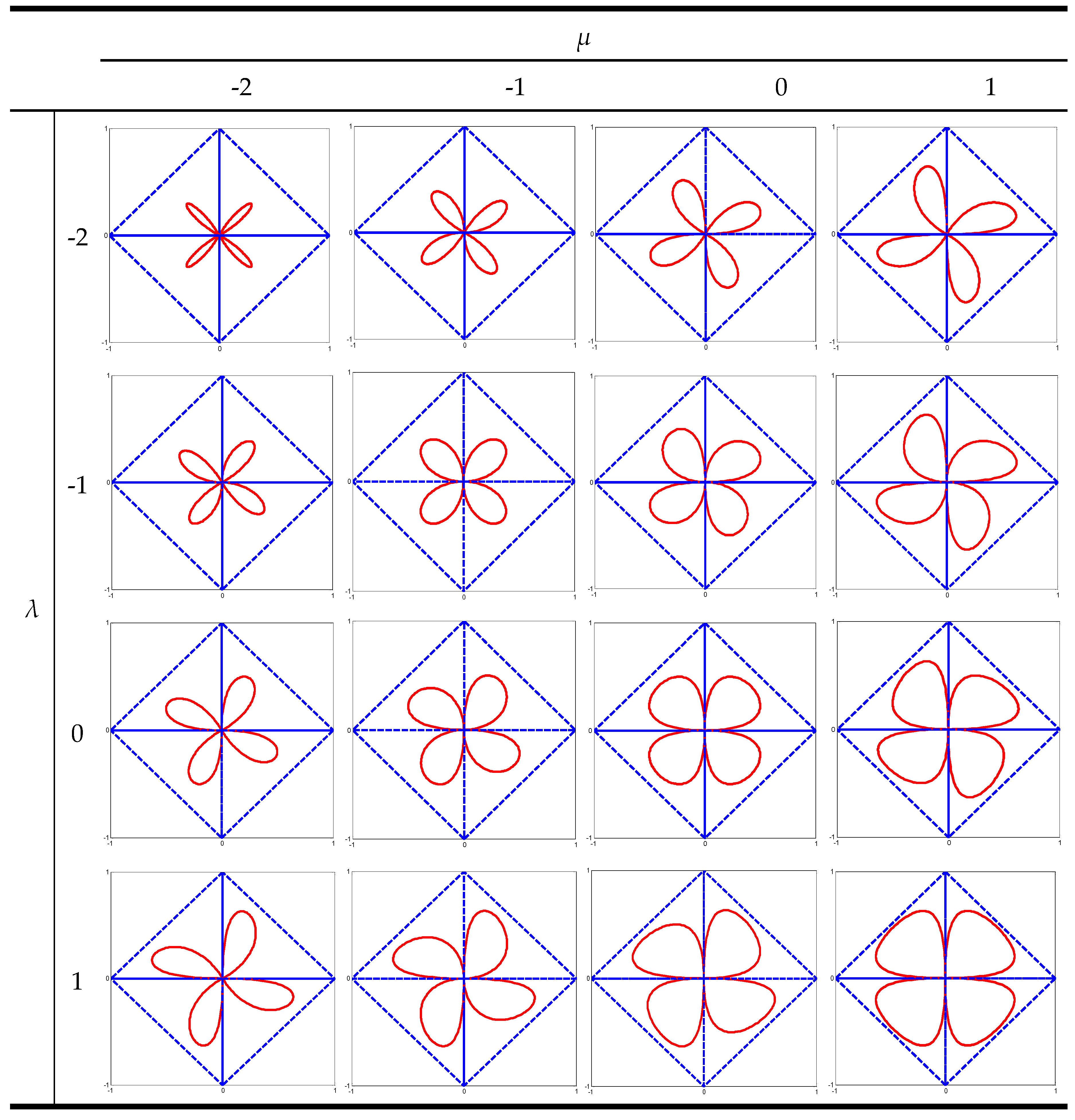
- For a contour curve of kitchen cabinets, designers can adjust the global and local shape of the curve by changing the multiple shape parameters.
- (3)
- Our proposed method not only quickly obtained various styles of kitchen cabinet modeling schemes but also easily realized the shape optimization design by finding optimal shape parameters.
- (4)
- The proposed method in this paper is easy to apply or extend to the parametric design of other products.
Author Contributions
Funding
Acknowledgments
Conflicts of Interest
References
- Millman, D. Brand Thinking and Other Noble Pursuits: Insights and Provocations from World-Renowned Brand Consultants, Thought Leaders Designers, and Strategists; All Worth Press: New York, NY, USA, 2011. [Google Scholar]
- Berghman, M.; Hekkert, P. Towards a unified model of aesthetic pleasure in design. New Ideas Psychol. 2017, 47, 136–144. [Google Scholar] [CrossRef]
- Moulson, T.; Sproles, G. Styling strategy. Bus. Horiz. 2000, 43, 45–52. [Google Scholar] [CrossRef]
- Farin, G. Curves and Surfaces for CAGD: A Practical Guide, 5th ed.; Academic Press: San Diego, CA, USA, 2002. [Google Scholar]
- Tovey, M. Computer-aided vehicle styling. Comput. Aided Des. 1989, 21, 172–179. [Google Scholar] [CrossRef]
- Oxman, R. Thinking difference: Theories and models of parametric design thinking. Des. Stud. 2017, 52, 4–39. [Google Scholar] [CrossRef]
- Shajay, B. Parametric design thinking: Symmetry a case-study of practice-embedded architectural research. Des. Stud. 2017, 52, 115–143. [Google Scholar]
- Hyun, K.H.; Lee, J.H. Balancing homogeneity and heterogeneity in design exploration by synthesizing novel design alternatives based on genetic algorithm and strategic styling decision. Adv. Eng. Inform. 2018, 38, 113–128. [Google Scholar] [CrossRef]
- Padmanabhan, R.; Oliveira, M.C.; Baptista, A.J.; Alves, J.L.; Menezes, L.F. Blank design for deep drawn parts using parametric NURBS surfaces. J. Mater. Process. Technol. 2009, 209, 2402–2411. [Google Scholar] [CrossRef] [Green Version]
- Wang, C.C.L. Parameterization and parametric design of mannequins. Comput. Aided Des. 2005, 37, 83–98. [Google Scholar] [CrossRef]
- Huang, J.; Kwok, T.H.; Zhou, C. Parametric design for human body modeling by wireframe-assisted deep learning. Comput. Aided Des. 2018, 108, 19–29. [Google Scholar] [CrossRef]
- Pérez-Arribas, F.; Pérez-Fernández, R. A B-spline design model for propeller blades. Adv. Eng. Softw. 2018, 118, 35–44. [Google Scholar] [CrossRef]
- Koini, G.N.; Sarakinos, S.S.; Nikolos, I.K. A software tool for parametric design of turbomachinery blades. Adv. Eng. Softw. 2009, 40, 41–51. [Google Scholar] [CrossRef]
- Yu, S.L.; Wang, Z.W.; Li, J. NURBS on the design of the horse-hoof-shaped leg. J. Nanjing For. Univ. 2001, 25, 77–79. [Google Scholar]
- Khan, S.; Gunpinar, E.; Dogan, K.M. A novel design framework for generation and parametric modification of yacht hull surfaces. Ocean Eng. 2017, 136, 243–259. [Google Scholar] [CrossRef] [Green Version]
- Merrell, P.; Dinesh, M. Example-based curve synthesis. Comput. Graph. 2010, 34, 304–311. [Google Scholar] [CrossRef]
- Hu, G.; Wu, J.L.; Qin, X.Q. A novel extension of the Bézier model and its applications to surface modeling. Adv. Eng. Softw. 2018, 125, 27–54. [Google Scholar] [CrossRef]
- Hu, G.; Bo, C.; Wu, J.; Wei, G.; Hou, F. Modeling of free-form complex curves using SG-Bézier curves with constraints of geometric continuities. Symmetry 2018, 10, 545. [Google Scholar] [CrossRef] [Green Version]
- Liu, F.; Ji, X.; Hu, G.; Gao, J. A novel shape-adjustable surface and its applications in car design. Appl. Sci. 2019, 9, 2339. [Google Scholar] [CrossRef] [Green Version]
- Guo, L.; Zhao, J.; Hu, G. Ceramic product form design based on quartic ω-Bézier curves. China Ceram. 2015, 51, 41–44. [Google Scholar]
- Zhou, M.; Yang, J.Q.; Zheng, H.C.; Song, W.J. Design and shape adjustment of developable surfaces. Appl. Math. Model. 2013, 37, 3789–3801. [Google Scholar] [CrossRef]
- Hu, G.; Cao, H.X.; Qin, X.Q.; Wang, X. Geometric design and continuity conditions of developable λ-Bézier surfaces. Adv. Eng. Softw. 2017, 114, 235–245. [Google Scholar] [CrossRef]
- Hu, G.; Wu, J.L.; Qin, X.Q. A new approach in designing of local controlled developable H-Bézier surfaces. Adv. Eng. Softw. 2018, 121, 26–38. [Google Scholar] [CrossRef]
- Hu, G.; Wu, J.L. Generalized quartic H-Bézier curves: Construction and application to developable surfaces. Adv. Eng. Softw. 2019, 138, 102723. [Google Scholar] [CrossRef]
- Han, X.A.; Ma, Y.C.; Huang, X.L. The cubic trigonometric Bézier curve with two shape parameters. Appl. Math. Lett. 2009, 22, 226–231. [Google Scholar] [CrossRef] [Green Version]
- Li, J.C. Planar T-Bézier curve with approximate minimum curvature variation. J. Adv. Mech. Des. Syst. 2018, 12, 1–7. [Google Scholar] [CrossRef] [Green Version]
- Huang, J.; Li, Z.; Hu, J.L. Research on connection conditions of two T-Bézier surfaces and its application in textile modeling. Comput. Eng. Des. 2009, 32, 481–486. [Google Scholar]
- Liu, F.; Ji, X.M.; Gong, L.Q. A CAD modeling method for car form design based on CE-Bézier. In Proceedings of the 11th International Conferences on Computer Graphics, Visualization, Computer Vision and Image Processing (IADIS: 2017), Lisbon, Portugal, 21 July 2017. [Google Scholar]
- Guo, L.; Ji, X.M.; Hu, G.; Chu, J.J. Car headlight shape design based on cubic Q-Bézier curves. China Mech. Eng. 2013, 24, 1961–1969. [Google Scholar]
- Gao, J.; Cui, Y.; Ji, X.; Wang, X.; Hu, G.; Liu, F. A Parametric Identification Method of Human Gait Differences and its Application in Rehabilitation. Appl. Sci. 2019, 9, 4581. [Google Scholar] [CrossRef] [Green Version]
- Hwang, J.H.; Lee, H. Parametric Model for Window Design Based on Prospect-Refuge Measurement in Residential Environment. Sustainability 2018, 10, 3888. [Google Scholar] [CrossRef] [Green Version]
- Farin, G. Geometric Hermite interpolation with circular precision. Comput. Aided Geom. Des. 2008, 40, 476–479. [Google Scholar] [CrossRef] [Green Version]
- Lu, L.Z. A note on curvature variation minimizing cubic Hermite interpolants. Appl. Math. Comput. 2015, 259, 596–599. [Google Scholar] [CrossRef]
- Lu, L.Z.; Jiang, C.K.; Hu, Q.Q. Planar cubic G1 and quintic G2 Hermite interpolations via curvature variation minimization. Comput. Graph. 2017, 70, 92–98. [Google Scholar] [CrossRef]
- Lucchi. Non-invasive method for investigating energy and environmental performances in existing buildings. In PLEA 2011-Architecture and Sustainable Development, Conference Proceedings of the 27th International Conference on Passive and Low Energy Architecture; Altamira Press: Brussels, Belgium, 2011. [Google Scholar]

















© 2020 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Sun, X.; Ji, X. Parametric Model for Kitchen Product Based on Cubic T-Bézier Curves with Symmetry. Symmetry 2020, 12, 505. https://doi.org/10.3390/sym12040505
Sun X, Ji X. Parametric Model for Kitchen Product Based on Cubic T-Bézier Curves with Symmetry. Symmetry. 2020; 12(4):505. https://doi.org/10.3390/sym12040505
Chicago/Turabian StyleSun, Xin, and Xiaomin Ji. 2020. "Parametric Model for Kitchen Product Based on Cubic T-Bézier Curves with Symmetry" Symmetry 12, no. 4: 505. https://doi.org/10.3390/sym12040505
APA StyleSun, X., & Ji, X. (2020). Parametric Model for Kitchen Product Based on Cubic T-Bézier Curves with Symmetry. Symmetry, 12(4), 505. https://doi.org/10.3390/sym12040505