1. Introduction
In recent years, fractional calculus has becoming an efficient and successful tool for the analysis of several physical-mathematical problems. The main reason for the increasing number of papers dealing with fractional problems is also explained by the intrinsic and natural possibility of the fractional calculus to take into account also some memory effects, which is quite impossible by using the ordinary differential operators [
1]. In this work, we consider the nonlinear multi-order fractional differential equations (MOFDEs) of the form
subjected by the following boundary or supplementary conditions
where
are linear functions,
, and
are some given points in
. In (
1),
denotes the Caputo fractional derivative operator such that
,
, and
are real constants. The function
F can be either linear or nonlinear function of its arguments. In [
2], some preliminary results both on the existence and uniqueness of the solution of MOFDEs (
1) are obtained.
It is well-known that usually the exact solution of fractional differential equations cannot be obtained analytically. Therefore, many authors have recently developed some suitable numerical methods for such equations. Among the many approximation algorithms for (
1) and (
2), we mention the systems-based decomposition approach [
3], the Adomian decomposition method [
4], the spectral methods [
5,
6,
7,
8], the B-spline approach [
9], and the generalized triangular function [
10].
It is known that the traditional orthogonal polynomials such as Jacobi, Hermit, and Laguerre are solution of a second order differential equation. In addition, the derivatives of these polynomials constitute an orthogonal system. Moreover, there exist another set of polynomials with the two aforementioned properties. They satisfy the following second order differential equation
where
n is a positive integer. Krall and Frink [
11] called these the Bessel polynomials thank to their close relation with the Bessel functions of half-integral order. In fact, they have shown that these polynomials occur naturally as the solutions of the classical wave equation in spherical coordinates. These polynomials also appear in the study of various mathematical topics including transcendental number theory [
12,
13] and student t-distributions [
14]. These polynomials seem to have been considered first by Bochner [
15] as pointed in Grosswald [
16]. However, Krall and Frink considered them in more general setting so that to include also the polynomial solutions of the differential Equation (
3). The properties of Bessel polynomials such as recurrence relations, generating functions, and orthogonality were investigated in [
11]. The algebraic properties of these polynomials were considered by Grosswald [
16]. Some more information about the theory and applications of Bessel polynomials can be found e.g., in [
17].
In this research, we establish a new approximation algorithm based upon the Bessel polynomials to obtain a solution of a fractional model (
1). In fact, one of our motivation comes from a recent paper [
18], which proved the total positiveness of any collocation matrix of theses polynomials evaluated at positive (collocation) points. To the best of our knowledge, this is the first attempt to study these polynomials for approximating MOFDEs. In summary, the main idea behind the presented approximation algorithm based on using the Bessel polynomials with together the collocation points is that it transforms the differential operators in (
1) to an equivalent algebraic form, thus greatly reducing the numerical efforts. It should be mentioned that our Bessel polynomials are different from those Bessel functions known as Bessel functions of the first kind that previously considered in the literature, see [
19] for a recent review.
The content of the paper is structured as follows. In
Section 2 some relevant properties of the Caputo fractional derivative and the generalized Taylor’s formula for the Caputo derivative are presented.
Section 3 is dedicated to the definitions of Bessel polynomials and their generalized fractional-order counterpart. Moreover, the results about the convergence and error bound of these polynomials are established. In
Section 4, where a collocation method also shown to solve the MOFDEs. By using these Bessel basis functions along with collocation points, the proposed method converts the MOFDEs into a nonlinear matrix equation. Hence, the residual error function is introduced to assess the accuracy of Bessel-collocation scheme when the exact solutions are not available. In
Section 5, some examples with various parameters together with error evaluation are given to show the utility and applicability of the method. The obtained results are interpreted through tables and figures. Finally, in
Section 6, the report ends with a summary and conclusion.
4. The Collocation Scheme
To proceed, we approximate the solution
of MOFDEs (
1) in terms of
-terms Bessel polynomials series denoted by
on the interval
. In the matrix representation, we consider
By placing the collocation points (
15) into (
16), we get to a system of matrix equations as
Hence, we write the preceding equations compactly as
where
To handle the fractional derivative of order
in (
1), we differentiate both sides of (
16),
By means of the property (
5) and (6), the calculation of
can be easily obtained as follows
To write the fractional derivative
involved in (
1) in the matrix form, the collocation points (
15) will be inserted into (
18) to have
which can be expressed equivalently as
where
Similarly, the fractional derivative operators
in (
1) for
can be approximated as
where
and
are obtained as in (
20) by replacing
with
.
By inserting the collocation points into (
1), we have the system
Considering these equations in a matrix form and substituting the relations (
17), (
19), and (
20) into the resulting system, a fundamental matrix equation is obtained to be solved. Let us assume that the function
F in (
21) is the linear form
where
for
and
,
are given functions. In this case, the equations in (
21) can be rewritten in the matrix representation as
where the coefficient matrices
,
with size
and the vector
of size
have the forms
Substituting the relations (
17), (
19), and (
20) into (
22), the fundamental matrix equation is obtained
where
Obviously, (
23) is a linear matrix equation and
,
are the unknowns Bessel coefficients to be determined.
Next aim is to take into account the initial or boundary conditions (
2). For the first condition
, we tend
in (
16) to get the following matrix representation
For the remaining initial conditions, one needs to calculate the integer-order derivatives
,
, which strictly depend on
as well as
N. For example, by choosing
and
we get
Differentiation twice with respect to
t reveals that
Now, by differentiating
k times in (
16), and defining
with the limit
, we conclude for
that
Similarly, for the end conditions
,
, the following matrix expressions are obtained
Now, we replace the first
n rows of the augmented matrix
in (
23) by the row matrices
or
,
to get the (nonlinear) algebraic system of equations
Thus, the unknown Bessel coefficients in (
16) will be known through solving this (nonlinear) system. This can be obtained by using the Newton’s iterative algorithm.
Remark 1. In numerical applications below, we frequently encounter the nonlinear terms like for . To approximate the nonlinear term in terms of , the collocation points (15) will be substituted into . It can be easily seen that in the matrix representation we have Using (16), we further express the matrix as a product of three block diagonal matrices as followswhere Analogously, the higher-order nonlinear terms can be treated recursively , .
Error Estimation
In general, the exact solution of most MOFDEs cannot be explicitly obtained. Thus, we need some measurements to test the accuracy of the proposed scheme. Since the truncated Bessel series (
11) as an approximate solution is satisfied in (
1), our expectation is that the residual error function denoted by
becomes approximately small. Here,
obtained by inserting the computed approximated solution
into the differential equation (
1). More precisely, for testing accuracy of some numerical models we calculate
It should be noticed that the fractional derivatives of order
,
,
of the approximate solution
in (
24) are calculated by using the properties (
5) and (6). Obviously, the residual function is vanished at the collocation points (
15), so our expectation is that
as
N tends to infinity. This implies that the smallness of the residual error function shows the closeness of the approximate solution to the true exact solution.
5. Illustrative Test Problems
Now, we show the benefits of the presented Bessel-collocation scheme by simulating some case examples including various linear and nonlinear initial and boundary value problems. The numerical models and calculations are verified through a comparison with existing computational schemes and experimental measurements. Our computations were carried out using MATLAB software version R2017a.
Problem 1. In the first problem, we consider the following inhomogeneous Bagley–Torvik equation modelling the motion of an immersed plate in a Newtonian fluid [5,6,7]with the initial conditions and . The exact solution of this problem is . By employing
and
, we are looking for an approximate solution in the form
. To this end, we calculate the unknown coefficients
and
. For this example we set
and the collocation points
,
,
are used. Using
and
, the corresponding matrices and vectors in the fundamental matrix Equation (
23) become
By solving the linear system
, the coefficients matrix is found as
Afterwards, by inserting the obtained coefficients into
we get the approximate solution
which is the desired exact solution.
Problem 2. In the next example, the following nonlinear initial-value problem will be considered [5,7] The initial conditions are , , and . It can be easily checked that the exact true solution is .
For this example, we take
,
, and the collocation points are
. To obtain the unknown coefficients
in
, the following nonlinear algebraic system of equations to be solved
By solving the above system, we get
Therefore, we get
which is obviously the exact solution.
In the next example, we show the advantage of using the fractional-order Bessel functions in the computations.
Problem 3. In this test example, we solve the initial-value problem [7]with initial condition . The exact solution is . We first consider
and
. The approximated solution
for
takes the form
However, with a lower number of basis functions one can also obtain an accurate result. Using
,
and
,
, the following approximations are obtained
Moreover, to show the advantage of the presented approach and to validate our obtained approximated solutions, we make a comparison in terms of errors in the
and
norms in
Table 1. We compare the Bessel-collocation approach and the Chelyshkov collocation spectral method [
7]. In this comparison, we use different
and
.
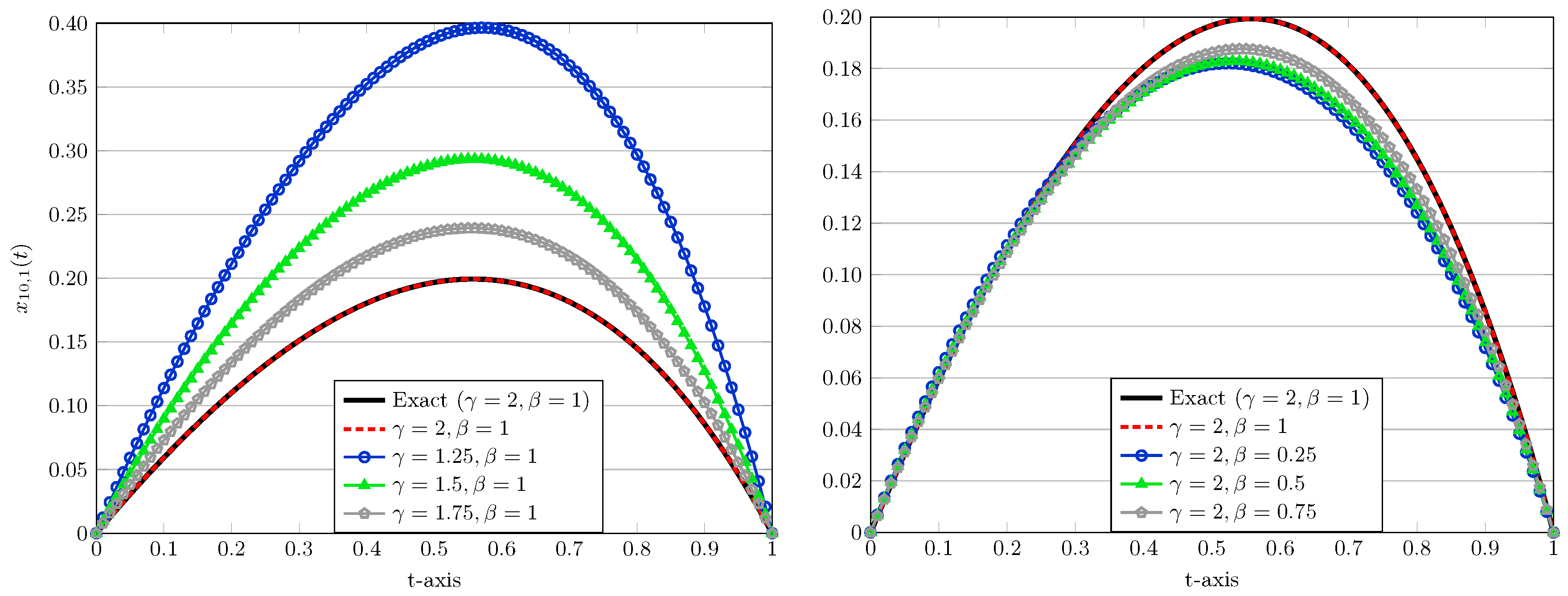
Problem 4. Consider the boundary value problem [22,23]with initial conditions and . The exact solution corresponds to and is given as . Let
and set
. For
,
, the approximate solution
of the model Problem 4 using Bessel functions in the interval
is
In
Table 2, we report the numerical results corresponding to these values of
,
using different
evaluated at some points
. The corresponding absolute errors
are also reported in this table. Moreover, the numerical results based on Haar wavelet operational matrices [
22] are given in the last column of
Table 2. As can see from
Table 2, our approximate solutions agree with the results obtained in [
22]. The next observation is that more accurate solutions are obtained if one increases the number of Bessel functions
N.
In
Figure 1,
is plotted when
(
) is fixed and different values of
(
) are examined. It is observed that as
and
approached to 1 and 2 respectively, numerical solutions tend to the exact solutions.
Problem 5. Let us consider the initial-value problem of Bagley–Torvik equation of fractional order with variable coefficients [24,25]with initial conditions , . The exact solution is . Clearly, the exact solution is a third-degree polynomial. Therefore, we take
and
, which are sufficient to get the desired approximations. Using the usual collocation points as in Problem 2 and similar to Problem 1, we get the final augmented matrix
Solving the resulting linear system, we find
Therefore, the approximated solution
is obtained as
which is the exact solution.
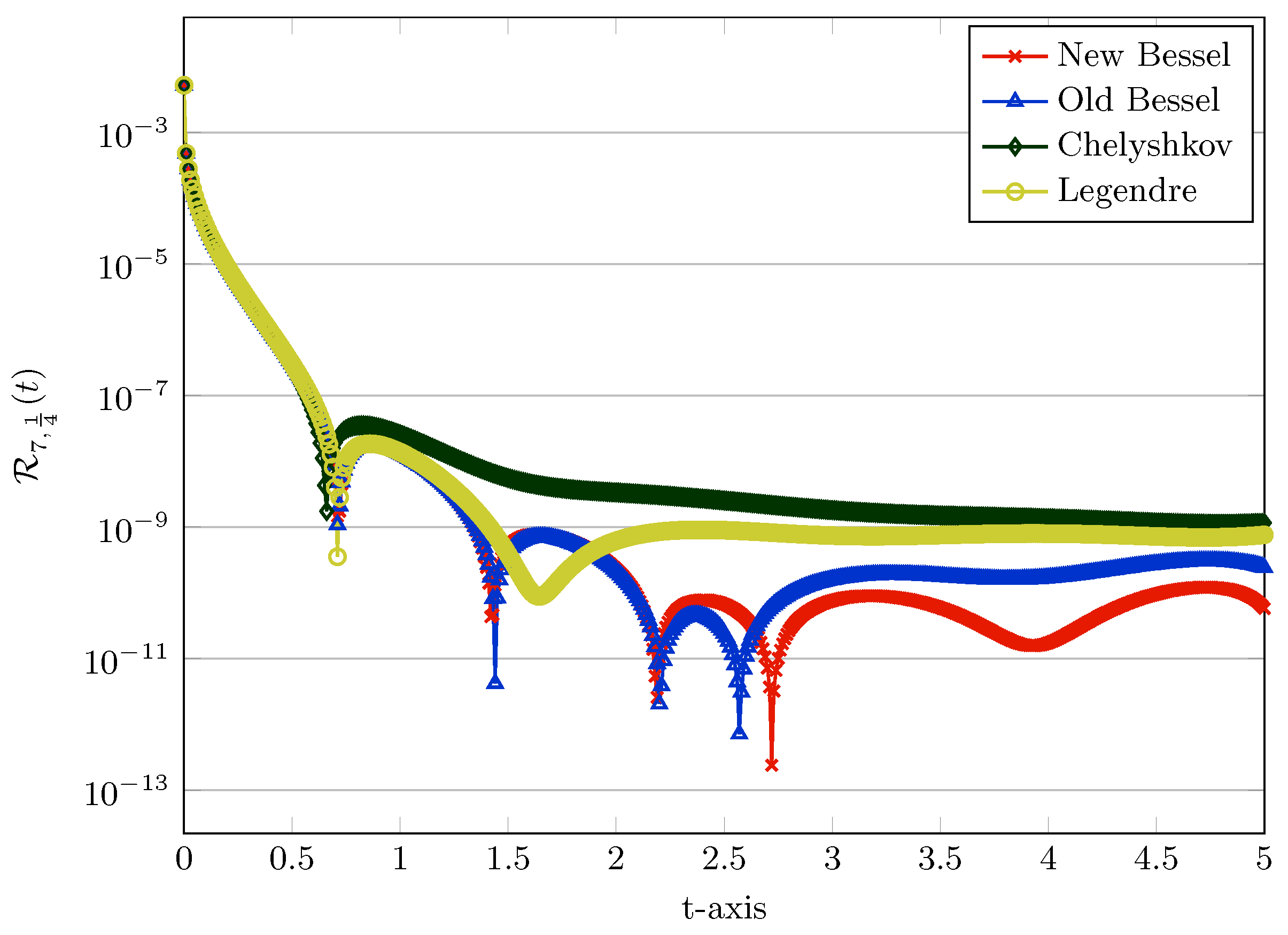
Problem 6. Consider the fractional Riccati equation [23,26]on a long time interval with and initial condition . When , the exact solution is . We calculate the approximated solution
using
and
equals to
. Thus, we get
To validate this solution, we also employ the old fractional-order Bessel polynomials as well as Chelyshkov and Legendre functions from the previous works [
26,
27] with the same parameters as above. The corresponding solutions take the forms respectively
To further compare these collocation schemes based on various polynomials, we calculate the estimated residual errors obtained by the relation (
24). The graphs of
on the interval
correspond to
and for
are shown in
Figure 2. With respect to
Figure 2, it is obviously seen that the residual error functions obtained by the presented Bessel-collocation method are smaller compared to the errors of other polynomial-based numerical collocation schemes.
Problem 7. Consider the following nonlinear boundary value problem with variable coefficients [6]with boundary conditions and . The exact solution of this example is . In this example, we have
,
, and
. First, we set
. The approximate solutions
of Problem 7 for
on
are obtained as follows, respectively
To show the gain of the proposed scheme, we compare our results with the collocation method based on Bernstein operational matrix (BOM) of fractional derivative from [
6].
Table 3 reports the errors in
and
norms of the new Bessel-collocation procedure and the errors of the BOM algorithm. This comparison shows the thoroughness of the proposed method.
Problem 8. We consider the following initial-value problem of multi-term nonlinear fractional differential equation [6]where , , and and the initial conditions are , , and . An easy calculation shows that is the exact solution. For this example, we set
. By applying the collocation technique based upon new Bessel functions at C1:
and for
, the following approximative solutions on
are obtained
A comparison between our collocation scheme at C1 and the method of shifted Jacobi operational matrix (SJOM) [
6] with
is made in
Table 4. Besides the cases C1 and C2:
, the following values of
are used in
Table 5 for comparison purposes
Looking at
Table 4 and
Table 5 reveals that our numerical solutions obtained via novel Bessel-collocation method are in excellent agreement with the corresponding exact solutions. Moreover, our proposed scheme is superior compared to the SJOM.
Problem 9. We consider the fractional relaxation-oscillation equation [5,6]with the initial condition . If we also have . The exact solution in terms of Mittag–Leffler function is given by . Here, . First, we consider
and set
equals to
. We get the approximated solution
using
terms on
as follows
In
Table 6, we calculate the maximum absolute errors using
and
. In addition, a comparison is done in this table with the results obtained via SJOM [
6]. Looking at
Table 6 one can find that the achievement of good approximations to the exact solution is possible using only a few terms of fractional Bessel polynomials.
In the next experiments, we investigate the impact of varying
on the maximum absolute errors while
is fixed.
Table 7 presents the
errors for
as well as
. In all cases, we exploit
. Comparisons with existing approximation techniques based on operational matrix of fractional derivatives via B-spline functions [
9] and shifted Jacobi functions [
6] are also carried out in
Table 7.
Problem 10. In the last case example, let us consider the following singular fractional Lane-Emden type equation [28,29]where , , , and The exact solution is .
To proceed, we take
,
, and
. Using the collocation points
for
and with
, the following approximation solutions are obtained by the Bessel-collocation procedure
Obviously, these approximations are accurate up to machine epsilon.
Table 8 reports the comparison of the absolute errors evaluated at some points
obtained by the Bessel-collocation method. For comparison, the results obtained by the collocation method (CM) [
29] and the reproducing kernel method (RKM) [
28] are also shown in
Table 8. The comparisons show that the proposed method is considerably more accurate than other methods.






{kind=link}
{kind=link}