Single-Valued Neutrosophic Set Correlation Coefficient and Its Application in Fault Diagnosis


Abstract
:1. Introduction
1.1. Research Status
1.2. Contribution of This Work
2. Preliminaries
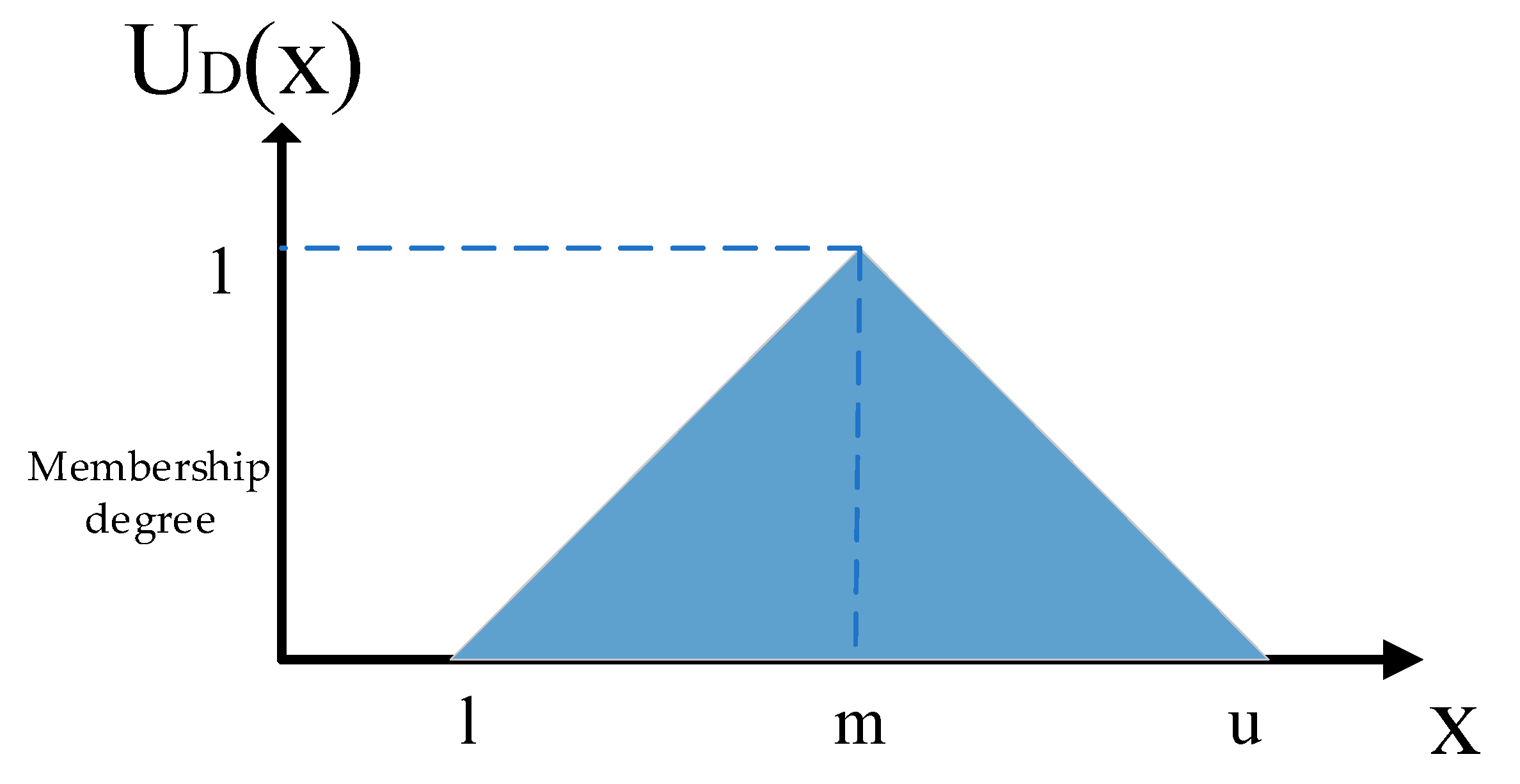
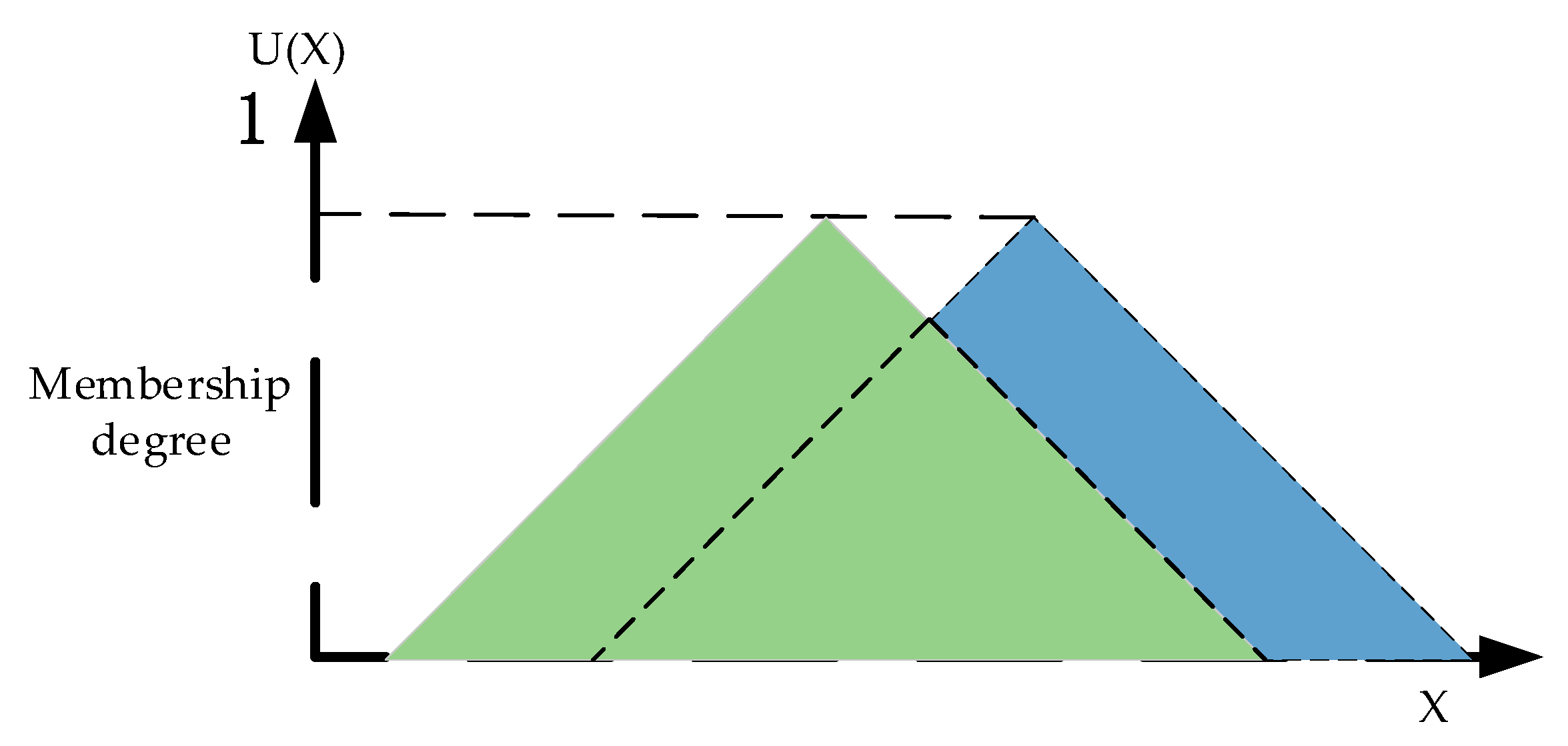
2.1. Triangular Fuzzy Numbers
2.2. Single-Valued Neutrosophic Sets
3. The Proposed Method
3.1. Correlation Coefficient between Single-Valued Neutrosophic Sets
- (1)
- According to the structural symmetry of the Formula (5), the condition is satisfied.
- (2)
- For each element in the Formula (5), they are satisfied , so obviously ; The proof of inequality as follows:And because of the inequality:Therefore, we can get:Therefore:There is:Finally, contacting the previous types, there are:In summary, the condition is satisfied;
- (3)
- If , so for any , all , , , we can see from the structure of Formula (5), .
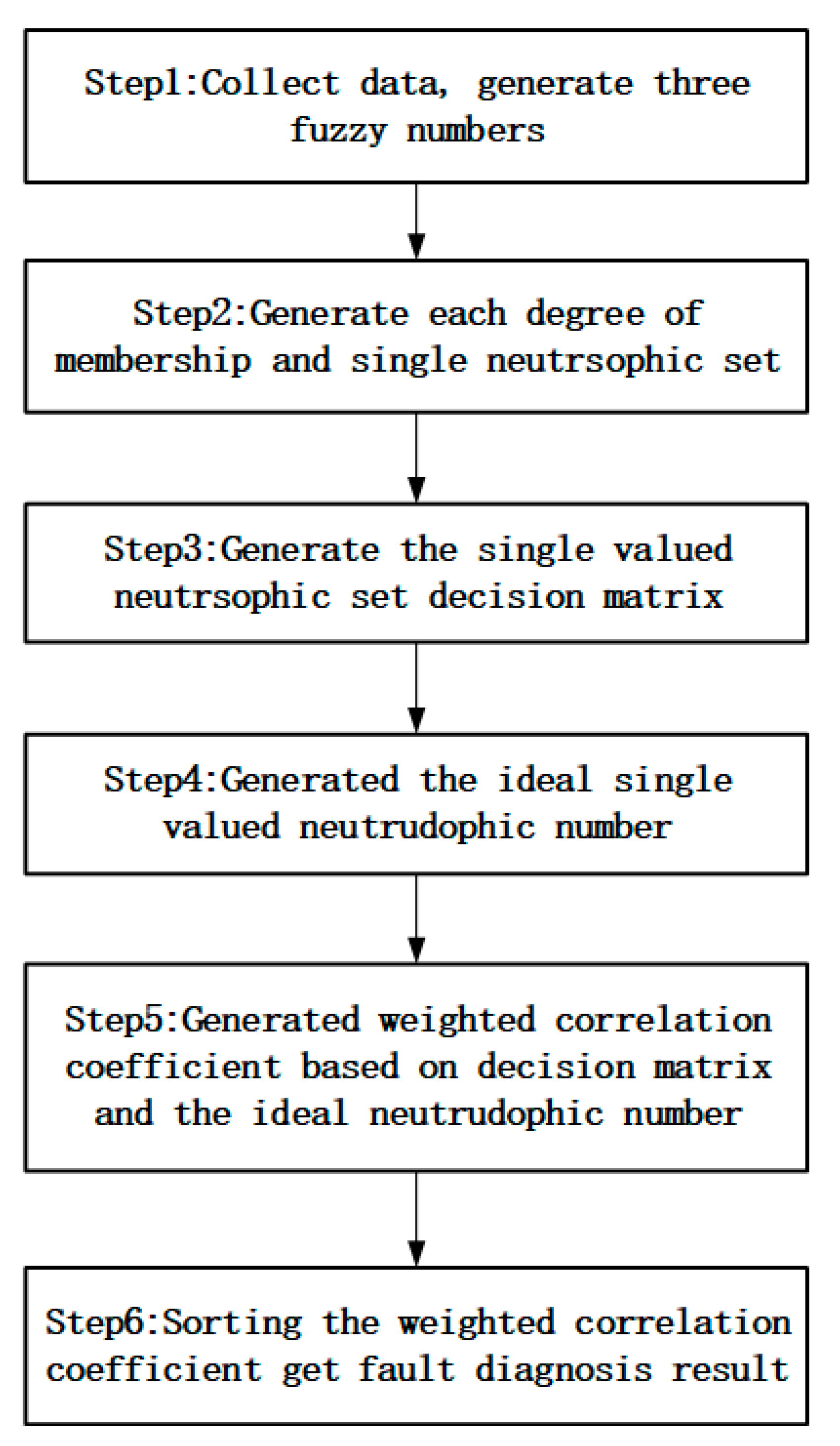
3.2. Fault Diagnosis Method
4. Illustrative Example and Discussion
4.1. Fault Diagnosis
- (i).
- According to the fault template data, the triangular fuzzy numbers under various attributes are obtained, in turn, as shown in Table 1:According to the analyzed sample data, the triangular fuzzy numbers under various attributes are obtained, in turn, as shown in Table 2:For the analyzed sample Xk ( represents the attribute), Xk and (where represent three kinds of faults) are used for matching, respectively. The neutrosophic numbers statistics generated by the determined-membership degree T, non-membership degree F, and indeterminacy-membership degree I, are calculated, as shown in Table 3:
- (ii).
- Next, for the same fault template, neutrosophic sets with different attributes under fuzzy sample X, we can get the single-valued neutrosophic decision matrix, as shown in Table 4:
- (iii).
- According to the single-valued neutrosophic set decision matrix and Formula (11) under sample X in Table 4, the ideal neutrosophic set can be obtained as follows:
- (iv).
- The weights of attributes are all the same, that is the weight matrix is as follows:Next, according to Table 4, Formula (7), (13), (14), for the fault template type () and the ideal single-valued neutrosophic set , calculate the improved weight correlation coefficient as follows:
- (v).
- Finally, according to Formula (15), , it can be seen that the analyzed samples X1-X4 belong to the first type of fault, namely, the X fault.
4.2. Fault Diagnosis Accuracy
5. Conclusions
Author Contributions
Funding
Conflicts of Interest
References
- Wang, H.; Deng, X.; Zhang, Z.; Jiang, W. A new failure mode and effects analysis method based on dempster–shafer theory by integrating evidential network. IEEE Access 2019, 7, 79579–79591. [Google Scholar]
- Ma, Y.; Wang, J.; Wang, J.; Wu, X. An interval neutrosophic linguistic multi-criteria group decision-making method and its application in selecting medical treatment options. Neural Comput. Appl. 2017, 28, 2745–2765. [Google Scholar]
- Wei, G.; Zhang, Z. Some single-valued neutrosophic bonferroni power aggregation operators in multiple attribute decision making. J. Ambient. Intell. Humaniz. Comput. 2018, 10, 1–20. [Google Scholar]
- Zadeh, L.A. Fuzzy sets. Inf. Control. 1965, 8, 338–353. [Google Scholar]
- Zhang, Y.; Jiang, W.; Deng, X. Fault diagnosis method based on time domain weighted data aggregation and information fusion. Int. J. Distrib. Sens. Netw. 2019, 15. [Google Scholar] [CrossRef]
- Deng, X.; Jiang, W. A total uncertainty measure for d numbers based on belief intervals. Int. J. Intell. Syst. 2019. [Google Scholar] [CrossRef] [Green Version]
- Han, C.; Shih, R.; Lee, L. Quantifying signed directed graphs with the fuzzy set for fault diagnosis resolution improvement. Ind. Eng. Chem. Res. 2010, 33, 1943–1954. [Google Scholar]
- Li, Y.; Shu, N. Transformer fault diagnosis based on fuzzy clustering and complete binary tree support vector machine. Trans. China Electrotech. Soc. 2016, 31, 64–70. [Google Scholar]
- Jiang, W.; Zhong, Y.; Deng, X. A Neutrosophic Set Based Fault Diagnosis Method Based on Multi-Stage Fault Template Data. Symmetry 2018, 10, 346. [Google Scholar]
- Fu, C.; Chang, W.; Liu, W.; Yang, S. Data-driven group decision making for diagnosis of thyroid nodule. Sci. China Inf. Sci. 2019, 62, 212205. [Google Scholar]
- Xu, X.; Wen, C. Theory and Application of Multi-Source and Uncertain Information Fusion; Science Press: Beijing, China, 2012; pp. 98–108. [Google Scholar]
- Geng, J.; Ma, X.; Zhou, X.; Wang, S.; Yang, S.; Jiao, L. Saliency-Guided Deep Neural Networks for SAR Image Change Detection. IEEE Transactions on Geoence and Remote Sensing. Remote. Sens. Lett. 2019, 99, 1–13. [Google Scholar] [CrossRef]
- Sun, C.; Li, S.; Den, Y. Determining Weights in Multi-Criteria Decision Making Based on Negation of Probability Distribution under Uncertain Environment. Mathematics 2020, 8, 191. [Google Scholar] [CrossRef] [Green Version]
- Kandasamy, W.B.V.; Smarandache, I.; Neutrosophic, F. Components Semigroups and Multiset Neutrosophic Components Semigroups. Symmetry 2020, 12, 818. [Google Scholar]
- Yang, W.; Cai, L.; Edalatpanah, S.A.; Smarandache, F. Triangular Single Valued Neutrosophic Data Envelopment Analysis: Application to Hospital Performance Measurement. Symmetry 2020, 12, 588. [Google Scholar]
- Zhou, Q.; Mo, H.; Deng, Y. A New Divergence Measure of Pythagorean Fuzzy Sets Based on Belief Function and Its Application in Medical Diagnosis. Mathematics 2020, 8, 142. [Google Scholar] [CrossRef] [Green Version]
- Zhou, X.; Li, P.; Smarandache, F.; Khalil, A.M. New Results on Neutrosophic Extended Triplet Groups Equipped with a Partial Order. Symmetry 2019, 11, 1514. [Google Scholar] [CrossRef] [Green Version]
- Saber, Y.; Alsharari, F.; Smarandache, F. On Single-Valued Neutrosophic Ideals in Šostak Sense. Symmetry 2020, 12, 193. [Google Scholar] [CrossRef] [Green Version]
- Liu, B.; Deng, Y. Risk Evaluation in Failure Mode and Effects Analysis Based on D Numbers Theory. Int. J. Comput. Commun. Control. 2019, 14, 672–691. [Google Scholar]
- Caliskan, F.; Zhang, Y.; Wu, N.E.; Shin, J.-Y. Actuator Fault Diagnosis in a Boeing 747 Model via Adaptive Modified Two-Stage Kalman Filter. Int. J. Aerosp. Eng. 2014, 2014, 10. [Google Scholar] [CrossRef] [Green Version]
- Deng, X.; Jiang, W. Evaluating Green Supply Chain Management Practices under Fuzzy Environment: A Novel Method Based on D Number Theory. Int. J. Fuzzy Syst. 2019, 21, 1389–1402. [Google Scholar] [CrossRef]
- Deng, X.; Jiang, W. D number theory based game-theoretic framework in adversarial decision making under a fuzzy environment. Int. J. Approx. Reason. 2019, 106, 194–213. [Google Scholar] [CrossRef]
- Deng, X.; Jiang, W.; Wang, Z. Zero-sum polymatrix games with link uncertainty: A Dempster-Shafer theory solution. Appl. Math. Comput. 2019, 340, 101–112. [Google Scholar]
- Zieja, M.; Golda, P.; Zokowski, M.; Majewski, P. Vibroacoustic technique for the fault diagnosis in a gear transmission of a military helicopter. J. Vibroengineering 2017, 19, 1039–1049. [Google Scholar] [CrossRef] [Green Version]
- Zhang, C.; Li, D.; Broumi, S.; Kumar, A. Medical Diagnosis Based on Single-Valued Neutrosophic Probabilistic Rough Multisets over Two Universes. Symmetry 2018, 10, 213. [Google Scholar] [CrossRef] [Green Version]
- Jiang, W.; Cao, Y.; Deng, X. A Novel Z-network Model Based on Bayesian Network and Z-number. IEEE Trans. Fuzzy Syst. 2019. [Google Scholar] [CrossRef]
- Jiang, W. A correlation coefficient for belief functions. Int. J. Approx. Reason. 2018, 103, 94–106. [Google Scholar] [CrossRef] [Green Version]
- Oliveira, C.C.; da Silva, J.M. Fault Diagnosis in Highly Dependable Medical Wearable Systems. J. Electron. Test. 2016, 32, 467–479. [Google Scholar] [CrossRef] [Green Version]
- Strydom, J.J.; Miskin, J.J.; Mccoy, J.T.; Auret, L.; Dorfling, C. Fault diagnosis and economic performance evaluation for a simulated base metal leaching operation. Miner. Eng. 2018. [Google Scholar] [CrossRef]
- Huang, Z.; Yang, L.; Jiang, W. Uncertainty measurement with belief entropy on the interference effect in the quantum-like Bayesian Networks. Appl. Math. Comput. 2019, 347, 417–428. [Google Scholar]
- He, Z.; Jiang, W. An evidential Markov decision making model. Inf. Sci. 2018, 467, 357–372. [Google Scholar] [CrossRef] [Green Version]
- Gong, X.; Qiao, W. Bearing Fault Diagnosis for Direct-Drive Wind Turbines via Current-Demodulated Signals. Ind. Electron. IEEE Trans. 2013, 60, 3419–3428. [Google Scholar]
- Ji, W.; Li, B. Fault Diagnosis Method of Exhaust System of Port Vehicle. J. Coast. Res. 2018, 83, 469–473. [Google Scholar]
- Askarian, M.; Zarghami, R.; Jalali-Farahani, F.; Navid, M. Fault Diagnosis of Chemical Processes Considering Fault Frequency via Bayesian Network. Can. J. Chem. Eng. 2016, 94, 2315–2325. [Google Scholar] [CrossRef]
- Daroogheh, N.; Meskin, N.; Khorasani, K. Particle Filter-Based Fault Diagnosis of Nonlinear Systems Using a Dual Particle Filter Scheme. IEEE Trans. Control Syst. Technol. 2016. [Google Scholar] [CrossRef]
- Tra, V.; Kim, J.; Khan, S.A.; KIM, J.-M. Incipient fault diagnosis in bearings under variable speed conditions using multiresolution analysis and a weighted committee machine. J. Acoust. Soc. Am. 2017, 142, EL35. [Google Scholar] [CrossRef] [Green Version]
- Lu, W.; Liang, B.; Cheng, Y.; Meng, D.; Yang, J.; Zhang, T. Deep Model Based Domain Adaptation for Fault Diagnosis. IEEE Trans. Ind. Electron. 2016, 64, 2296–2305. [Google Scholar] [CrossRef]
- Smarandache, F. Neutrosophy: Neutrosophic Probability, Set, and Logic: Analytic Synthesis and Synthetic Analysis; American Research Press: Rehoboth, MI, USA, 1998. [Google Scholar]
- Wang, H.; Smarandache, F.; Zhang, Y.; Sunderraman, R. Single valued neutrosophic sets. In Proceedings of the 8th Joint Conference on Information Sciences. Joint Conference Information Science, Salt Lake City, UT, USA, 21–26 July 2005; pp. 94–97. [Google Scholar]
- Ye, J. A multicriteria decision-making method using aggregation operators for simplified neutrosophic sets. J. Intell. Fuzzy Syst. 2014, 26, 2459–2466. [Google Scholar] [CrossRef]
- Ye, J. Another Form of Correlation Coefficient between Single Valued Neutrosophic Sets and Its Multiple Attribute Decision-Making Method. Neutrosophic Sets Syst. 2013. [Google Scholar] [CrossRef]
- Zhang, H.; Deng, Y. Weighted belief function of sensor data fusion in engine fault diagnosis. Soft Comput. 2020, 24, 2329–2339. [Google Scholar] [CrossRef]
- Xiao, F.; Ding, W. Divergence measure of Pythagorean fuzzy sets and its application in medical diagnosis. Appl. Soft Comput. 2019, 79, 254–267. [Google Scholar]
- Xiao, F. Multi-sensor data fusion based on the belief divergence measure of evidences and the belief entropy. Inf. Fusion 2019, 46, 23–32. [Google Scholar] [CrossRef]
- Gou, L.; Zhong, Y. A New Fault Diagnosis Method Based on Attributes Weighted Neutrosophic Set. IEEE Access 2019, 7, 117740–117748. [Google Scholar] [CrossRef]
- Jiang, W.; Huang, C.; Deng, X. A new probability transformation method based on a correlation coefficient of belief functions. Int. J. Intell. Syst. 2019, 34, 1337–1347. [Google Scholar] [CrossRef]
- Broumi, S.; Nagarajan, D.; Bakali, A.; Talea, M.; Smarandache, F.; Lathamaheswari, M. The shortest path problem in interval valued trapezoidal and triangular neutrosophic environment. Complex Intell. Syst. 2019, 5, 391–402. [Google Scholar] [CrossRef] [Green Version]
- Broumi, S.; Nagarajan, D.; Bakali, A.; Talea, M.; Smarandache, F.; Lathamaheswari, M.; Kavikumar, J. Implementation of neutrosophic function memberships using matlab program. Neutrosophic Sets Syst. 2019, 27, 44–52. [Google Scholar]
- Chakraborty, A. A new score function of pentagonal neutrosophic number and its application in networking problem. Int. J. Neutrosophic Sci. 2020, 1, 40–51. [Google Scholar]




{kind=link}
{kind=link}
{kind=link}
| Min Value | Average Value | Max Value | Area | ||
|---|---|---|---|---|---|
| X | X11-X15 | 0.0661 | 0.1614605 | 0.2006 | 0.06725 |
| X21-X25 | 0.121 | 0.149226 | 0.3468 | 0.1129 | |
| X31-X35 | 0.0899 | 0.1123885 | 0.1296 | 0.01985 | |
| X41-X45 | 0.357 | 4.3256515 | 4.666 | 2.1545 | |
| Y | Y11-Y15 | 0.1567 | 0.181797 | 0.2038 | 0.02355 |
| Y21-Y25 | 0.3071 | 0.329311 | 0.351 | 0.02195 | |
| Y31-Y35 | 0.1865 | 0.242014 | 0.3218 | 0.06765 | |
| Y41-Y45 | 4.094 | 4.715255 | 8.896 | 2.401 | |
| Z | Z11-Z15 | 0.3006 | 0.3294004 | 0.3476 | 0.0235 |
| Z21-Z25 | 0.2801 | 0.343854 | 0.3647 | 0.0423 | |
| Z31-Z35 | 0.1151 | 0.136169 | 0.1864 | 0.03565 | |
| Z41-Z45 | 9.385 | 9.810633 | 10.112 | 0.3635 |
| Min Value | Average Value | Max Value | Area | ||
|---|---|---|---|---|---|
| X | X1 | 0.1416 | 0.14265 | 0.144 | 0.0012 |
| X2 | 0.1028 | 0.11092 | 0.3058 | 0.1015 | |
| X3 | 0.1279 | 0.133655 | 0.1378 | 0.00495 | |
| X4 | 4.06 | 4.0938 | 4.18 | 0.06 |
| Analyzed Sample | Fault Template | Neutrosophic Number |
|---|---|---|
| X1 | X11-X15 | (0.9612,0.0388,0.9914) |
| Y11-Y15 | (0,1,0.6751) | |
| Z11-Z15 | (0,1,0.6747) | |
| X2 | X21-X25 | (0.7540,0.2460,0.6610) |
| Y21-Y25 | (0,1,0.5972) | |
| Z21-Z25 | (0.0126,0.9874,0.6722) | |
| X3 | X31-X35 | (0.0127,0.9873,0.6451) |
| Y31-Y35 | (0,1,1) | |
| Z31-Z35 | (0.9836,0.0164,0.6952) | |
| X4 | X41-X45 | (0.9966,0.0034,0.9348) |
| Y41-Y45 | (0.0871,0.9129,0.9989) | |
| Z41-Z45 | (0,1,0.5757) |
| Diagnosis Fault | X1 | X2 | X3 | X4 |
|---|---|---|---|---|
| X11-X45 | (0.9612,0.0388,0.9914) | (0.7540,0.2460,0.6610) | (0.0127,0.9873,0.6451) | (0.9966,0.0034,0.9348) |
| Y11-Y45 | (0,1,0.6751) | (0,1,0.5972) | (0,1,1) | (0.0871,0.9129,0.9989) |
| Z11-Z45 | (0,1,0.6747) | (0.0126,0.9874,0.6722) | (0.9836,0.0164,0.6952) | (0,1,0.5757) |
| Unknow Fault | SVNPWA | The Proposed Algorithm | ||
|---|---|---|---|---|
| Times of Right | Times of Error | Times of Right | Times of Error | |
| X | 38 | 2 | 40 | 0 |
| Y | 40 | 0 | 39 | 1 |
| Z | 40 | 0 | 40 | 0 |
© 2020 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Iryna, S.; Zhong, Y.; Jiang, W.; Deng, X.; Geng, J. Single-Valued Neutrosophic Set Correlation Coefficient and Its Application in Fault Diagnosis. Symmetry 2020, 12, 1371. https://doi.org/10.3390/sym12081371
Iryna S, Zhong Y, Jiang W, Deng X, Geng J. Single-Valued Neutrosophic Set Correlation Coefficient and Its Application in Fault Diagnosis. Symmetry. 2020; 12(8):1371. https://doi.org/10.3390/sym12081371
Chicago/Turabian StyleIryna, Shchur, Yu Zhong, Wen Jiang, Xinyang Deng, and Jie Geng. 2020. "Single-Valued Neutrosophic Set Correlation Coefficient and Its Application in Fault Diagnosis" Symmetry 12, no. 8: 1371. https://doi.org/10.3390/sym12081371
APA StyleIryna, S., Zhong, Y., Jiang, W., Deng, X., & Geng, J. (2020). Single-Valued Neutrosophic Set Correlation Coefficient and Its Application in Fault Diagnosis. Symmetry, 12(8), 1371. https://doi.org/10.3390/sym12081371