Recognition of Crack-Rubbing Coupling Fault of Bearing under High Water Pressure Based on Polar Symmetry Mode Decomposition


Abstract
:1. Introduction
2. Materials and Methods
- (1)
- Dimensionality reduction was carried out for the system to improve the efficiency and the accuracy of the fault recognition and support the fault detection.
- (2)
- The internal characteristics of the signal were extracted.
- (3)
- According to the extraction results of characteristic parameters, the probability neural network was introduced to achieve the final recognition of bearing crack-rub coupling fault under high water pressure.
- (4)
- The validity of the fault recognition method was verified via experiment and discussion.
- (5)
- Summary was proposed, and prospects were put forward.
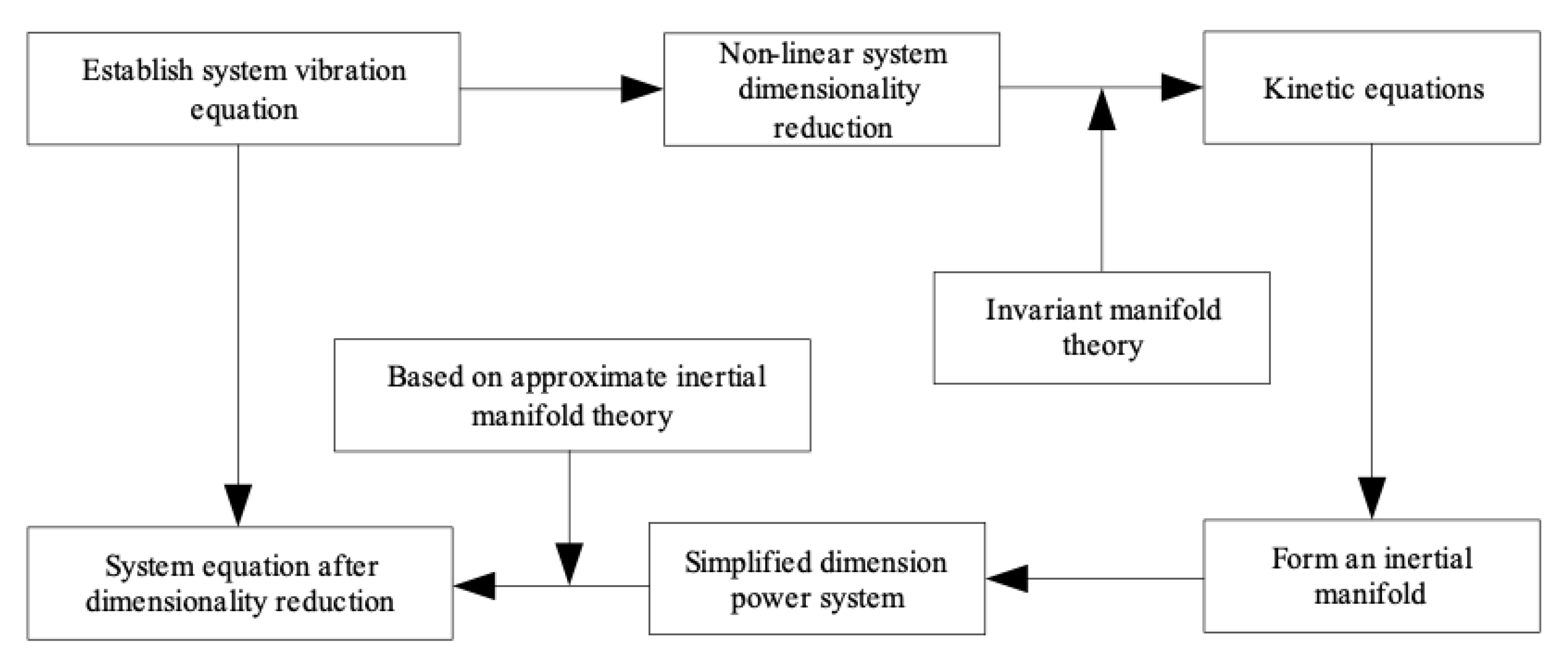
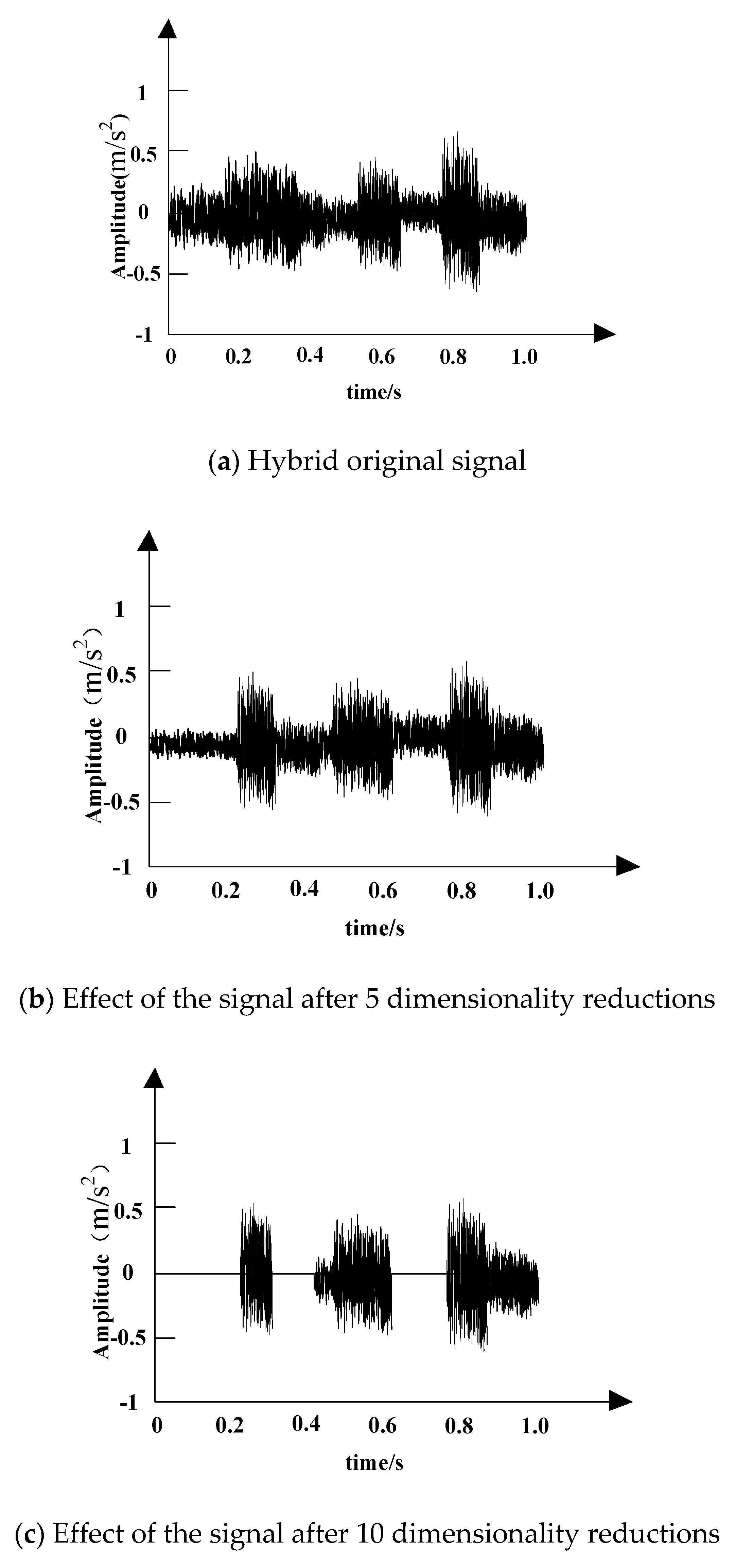
2.1. Dimensionality Reduction of System
2.2. Feature Parameters Extraction Based on Polar Symmetry Mode Decomposition
- (1)
- All the extreme points of time series X’ are marked and expressed via .
- (2)
- The midpoint of the line among the extreme points is marked as .
- (3)
- Boundary points and are added via linear interpolation method.
- (4)
- According to , curves are obtained via direct interpolation algorithm. The is calculated.
- (5)
- . The above four steps are repeated until is set up, where the represents the allowable error.In another situation, when the number iterations achieves the set value , the modal function is obtained.
- (6)
- As shown in Equation (10), for , the is solved repeatedly to obtain , respectively, until the end condition is achieved.
- (7)
- The value of maximum screen number is changed in section . The decomposition method is repeated to obtain a series of results.
- (8)
- The making the minimum value in the section . Then, the is substituted. The IMF is obtained via ESMD decomposition. The obtained R’ is the optimal AGM curve.
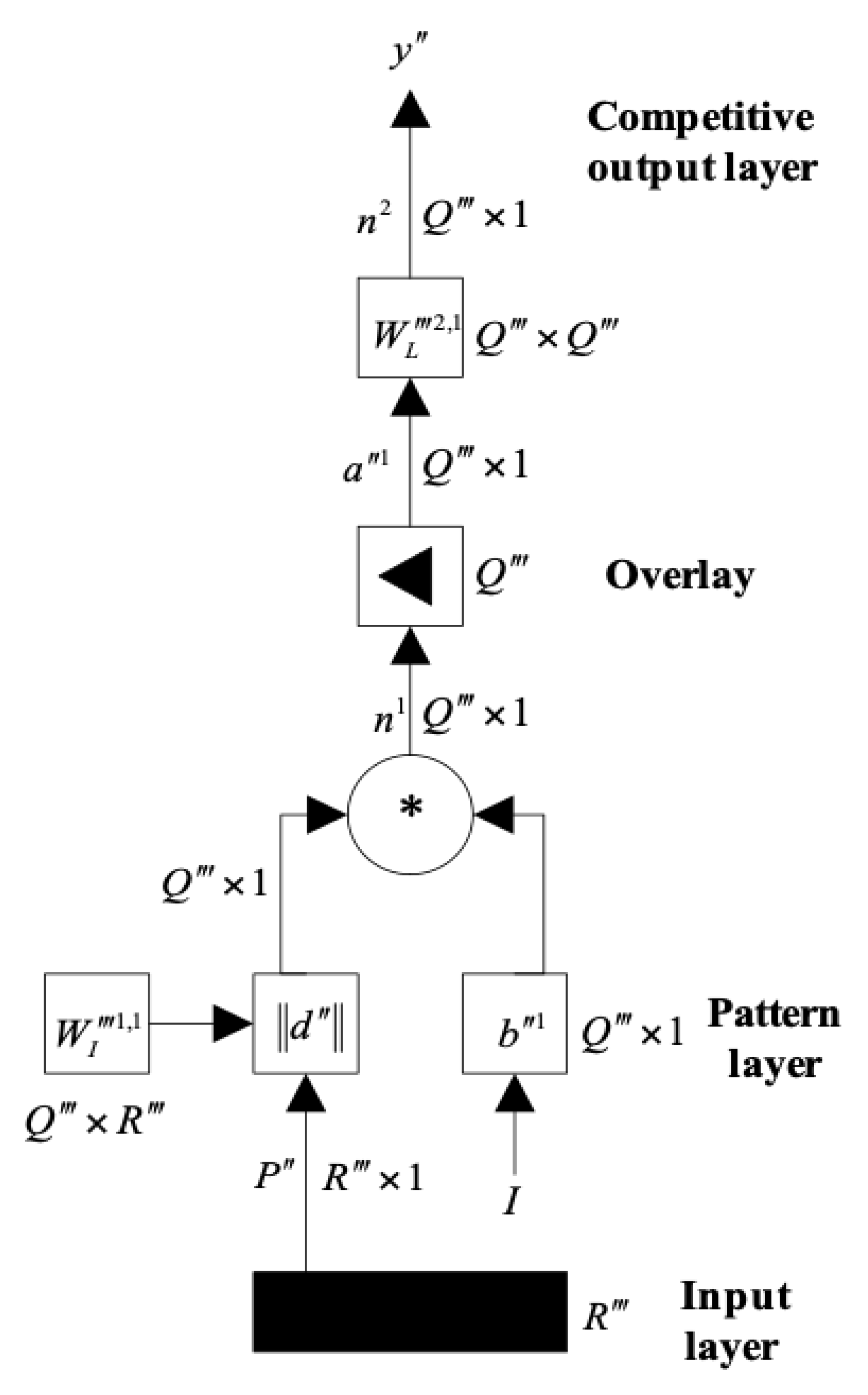
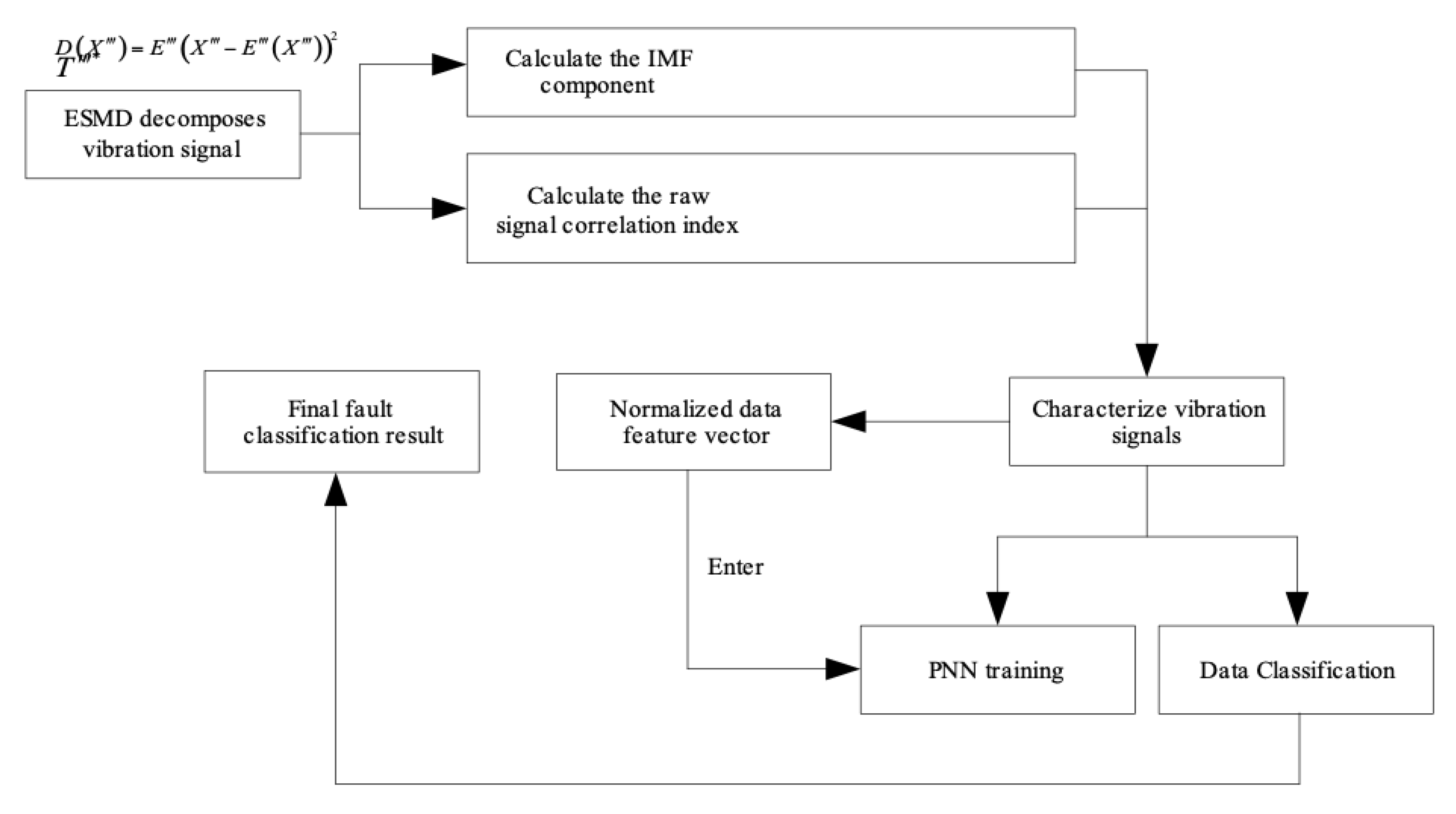
2.3. Fault Recognition
- (1)
- ESMD decomposition was carried out for the vibration signal.
- (2)
- The correlation index of the obtained IMF components and the original signal were calculated and ranked respectively. The former n IMF components were taken to characterize the vibration signal (the value of n depended on the specific vibration signal decomposition).
- (3)
- In order to facilitate PNN training and classification of the data, the obtained IMF component with high correlation was calculated in terms of energy. We created a vector and normalize the obtained vector as a whole.
- (4)
- was input into the PNN as the eigenvector to train until the optimal solution was output. The final classification results of the fault were obtained.
3. Results
4. Discussion
5. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Acknowledgments
Conflicts of Interest
References
- Esmaeili, K.; Zuercher, M.; Wang, L.; Harvey, T.; White, N.; Holweger, W.; Schlücker, E. A study of white etching crack bearing failure detection using electrostatic sensing in wind turbine gearboxes. Int. J. Cond. Monit. 2018, 12, 12–18. [Google Scholar] [CrossRef]
- Tang, C.; Yao, Q.; Li, Z.; Zhang, Y.; Ju, M. Experimental study of shear failure and crack propagation in water-bearing coal samples. Energy Sci. Eng. 2019, 7, 54–58. [Google Scholar] [CrossRef]
- Shaohu, L.; Yuandeng, W.; Hao, Z. Critical Ultimate Load and Ultimate Bearing Failure of CT110 with Initial Crack Defect. J. Fail. Anal. Prev. 2020, 12, 1–9. [Google Scholar] [CrossRef]
- Corne, B.; Vervisch, B.; Derammelaere, S.; Knockaert, J.; Desmet, J. Emulating single point bearing faults with the use of an active magnetic bearing. IET Sci. Meas. Technol. 2018, 12, 39–48. [Google Scholar] [CrossRef]
- Sathujoda, P. Detection of a slant crack in a rotor bearing system during shut-down. J. Struct. Mech. 2020, 48, 266–276. [Google Scholar] [CrossRef]
- Liu, Y.; Li, Y.Z.; Shi, T.; Ma, H.; Wen, B. Study on misalignment-rubbing coupling fault of rotor system supported by oil film force. J. Mech. Eng. 2016, 52, 79–86. [Google Scholar] [CrossRef]
- Xiang, L.; Gao, X.Y.; Zhang, L.J.; Di, W.W. Dynamic Analysis of a Rotor with Coupling Faults of Crack and Rub-Impact Under Nonlinear Oil-film Force. J. Chin. Soc. Power Eng. 2016, 36, 788–794. [Google Scholar]
- Zhuang, Z.; Chen, X.; Shi, Y.; Liu, Z.C. Research on fault detection of wheel set bearing based on IMF-SVD envelop spectrum method. China Meas. Test 2017, 43, 93–98. [Google Scholar]
- Bruce, T.; Long, H.; Dwyer-Joyce, R.S. Threshold Maps for Inclusion-Initiated Micro-Cracks and White Etching Areas in Bearing Steel: The Role of Impact Loading and Surface Sliding. Springer Open Choice 2018, 66, 223–241. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Li, Z.; Niu, Y.; Wang, E.; Liu, L.; Wang, H.; Wang, M.; Ali, M. Experimental Study on Electric Potential Response Characteristics of Gas-Bearing Coal During Deformation and Fracturing Process. Processes 2019, 7, 72. [Google Scholar] [CrossRef] [Green Version]
- Caesarendra, W.; Pratama, M.; Kosasih, B.; Tjahjowidodo, T.; Glowacz, A. Parsimonious Network Based on a Fuzzy Inference System (PANFIS) for Time Series Feature Prediction of Low Speed Slew Bearing Prognosis. Appl. Sci. 2018, 8, 2656. [Google Scholar] [CrossRef] [Green Version]
- Zhang, T.T.; Jia, M.Y. Common methods of mechanical equipment fault diagnosis technology and application research of new technology. Autom. Instrum. 2017, 10, 38–39. [Google Scholar]
- Glowacz, A. Acoustic fault analysis of three commutator motors. Mech. Syst. Signal Process. 2019, 133, 106226. [Google Scholar] [CrossRef]
- Adam, G.; Witold, G.; Jarosław, K.; Krzysztof, P.; Miroslav, G.; Wahyu, C.; Hui, L.; Frantisek, B.; Muhammad, I.; Faizal, K. Detection of Deterioration of Three-phase Induction Motor using Vibration Signals. Meas. Sci. Rev. 2019, 19, 241–249. [Google Scholar]
- Huang, D.; Yang, J.; Zhou, D.; Litak, G. Novel adaptive search method for bearing fault frequency using stochastic resonance quantified by amplitude-domain index. IEEE Trans. Instrum. Meas. 2019, 99, 1–13. [Google Scholar] [CrossRef]










{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Model | SKF6203 | SKF6205 |
|---|---|---|
| Rolling element diameter | 6.746 | 15.001 |
| Outer ring diameter | 39.99 | 51.9989 |
| Inner diameter | 17.0002 | 25.001 |
| Pitch diameter | 28.50 | 39.0398 |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2020 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Huang, J.; Hua, W.; Xie, T.; Yao, Y.; Dong, S. Recognition of Crack-Rubbing Coupling Fault of Bearing under High Water Pressure Based on Polar Symmetry Mode Decomposition. Symmetry 2021, 13, 59. https://doi.org/10.3390/sym13010059
Huang J, Hua W, Xie T, Yao Y, Dong S. Recognition of Crack-Rubbing Coupling Fault of Bearing under High Water Pressure Based on Polar Symmetry Mode Decomposition. Symmetry. 2021; 13(1):59. https://doi.org/10.3390/sym13010059
Chicago/Turabian StyleHuang, Jiuzhou, Wen Hua, Tianzhou Xie, Yanchao Yao, and Shiming Dong. 2021. "Recognition of Crack-Rubbing Coupling Fault of Bearing under High Water Pressure Based on Polar Symmetry Mode Decomposition" Symmetry 13, no. 1: 59. https://doi.org/10.3390/sym13010059
APA StyleHuang, J., Hua, W., Xie, T., Yao, Y., & Dong, S. (2021). Recognition of Crack-Rubbing Coupling Fault of Bearing under High Water Pressure Based on Polar Symmetry Mode Decomposition. Symmetry, 13(1), 59. https://doi.org/10.3390/sym13010059