1. Introduction
In recent years, numerous exoplanets have been discovered. One of the best Doppler spectrographs to discover low-mass exoplanets using the radial velocity method are HARPS (High Accuracy Radial Velocity Planet Searcher) installed on ESO’s 3.6 m telescope at La Silla and ESPRESSO (Echelle Spectrograph for Rocky Exoplanet- and Stable Spectroscopic Observations) installed on ESO’s VLT at Paranal Observatory in Chile. See, e.g., [
1,
2]. NASA’s Kepler space telescope has discovered more than half of the currently known exoplanets using the so-called transit method. See, e.g., [
3,
4]. For some theoretical work on planetary systems see, e.g., [
5]. In exoplanetary research it is a generally accepted view that Newton’s law of gravitation holds in extrasolar systems [
6]. Orbit mechanics of exoplanets, as is the case of solar planets and satellites, is classical mechanics of the Kepler problem under small perturbations. The common procedure for the study of perturbations to the Kepler motion is the so-called regularization, introduced by Levi–Civita (1906) for the planar motion [
7,
8] and generalized by Kustaanheimo and Stiefel (1965) to the spatial motion [
9]. The regularization in celestial mechanics is a transformation of the singular equation of motion for the Kepler problem to the non-singular equation of motion for the harmonic oscillator problem with or without perturbations. It identifies the Kepler motion with the harmonic oscillation, assuring the dual relation between Newton’s law and Hooke’s law (here, following the tradition, we mean by Newton’s law the inverse-square force law of gravitation and by Hooke’s law the linear force law for the harmonic oscillation. Although Hooke found the inverse square force law for gravitation prior to Newton, he was short of skills in proving that the orbit of a planet is an ellipse in accordance with Kepler’s first law, while Newton was able not only to confirm that the inverse square force law yields an elliptic orbit but also to show conversely that the inverse square force law follows Kepler’s first law. History gave Newton the full credit of the inverse square force law for gravitation. For a detailed account, see, e.g., Arnold’s book [
10]). The Newton–Hooke duality has been discussed by many authors from various aspects [
11,
12]. The basic elements of regularization are: (i) a transformation of space variables, (ii) interpretation of the conserved energy as the coupling constant, and (iii) a transformation of time parameter. The choice of space variables and time parameter is by no means unique. The transformation of space variables has been represented in terms of parabolic coordinates [
7,
8], complex numbers [
13,
14], spinors [
9], quaternions [
6,
15,
16], etc. The time transformation used by Sundman [
13,
17] and by Bohlin [
14] (for Bohlin’s theorem see also reference [
10]) is essentially based on Newton’s finding [
18] that the areal speed
is constant for any central force motion. It takes the form
where
s is a fictitious time related to the eccentric anomaly. To improve numerical integrations for the orbital motion, a family of time transformations
, called generalized Sundman transformations, has also been discussed [
19], in which
s corresponds to the mean anomaly if
, the eccentric anomaly if
, the true anomaly if
, and intermediate anomalies [
20] for other values of
. Even more generalizing, a transformation of the form
has been introduced in the context of regularization [
21].
As has been pointed out in the literature [
10,
18,
22,
23,
24], the dual relation between the Kepler problem and the harmonic oscillator was already known in the time of Newton and Hooke. What Newton posed in their Principia was more general. According to Chandrasekhar’s reading [
18] out of the propositions and corollaries (particularly Proposition VII, Corollary III) in the Principia, Newton established the duality between the centripetal forces of the form,
and
, for the pairs
and
. Revisiting the question on the duality between a pair of arbitrary power forces, Kasner [
25] and independently Arnol’d [
10] obtained the condition,
, for a dual pair. There are a number of articles on the duality of arbitrary power force laws [
26,
27]. Now on, for the sake of brevity, we shall refer to the duality of general power force laws as the power duality. The power duality includes the Newton–Hooke duality as a special case.
The quantum mechanical counterpart of the Kepler problem is the hydrogen atom problem. In 1926, Schrödinger [
28,
29] solved their equation for the hydrogen atom and successively for the harmonic oscillator. Although it must have been known that both radial equations for the hydrogen atom and for the harmonic oscillation are reducible to confluent hypergeometric equations [
30], there was probably no particular urge to relate the Coulomb problem to the Hooke problem, before the interest in the accidental degeneracies arose [
31,
32,
33]. Fock [
31,
32] pointed out that for the bound states the hydrogen atom has a hidden symmetry
and an appropriate representation of the group can account for the degeneracy. In connection with Fock’s work, Jauch and Hill [
34] showed that the
harmonic oscillator has an algebraic structure of
which is doubly-isomorphic to the
algebra possessed by the
hydrogen atom. The transformation of the radial equation from the hydrogen atom to that of the harmonic oscillator or vice verse was studied by Schrödinger [
35] and others, see Johnson’s article [
36] and references therein. The same problem in arbitrary dimensions has also been discussed from the supersymmetric interest [
37]. In the post-Kustaanheimo–Stiefel (KS) era, the relation between the three dimensional Coulomb problem and the four dimensional harmonic oscillator was also investigated by implementing the KS transformation or its variations in the Schrödinger equation. See ref. [
38] and references therein. The duality of radial equations with multi-terms of power potentials was studied in connection with the quark confinement [
36,
39,
40].
The time transformation of the form
used in classical mechanics is in principle integrable only along a classical trajectory. In other words, the fictitious time
s is globally meaningful only when the form of
as a function of
t is known. In quantum mechanics, such a transformation is no longer applicable due to the lack of classical paths. Hence it is futile to use any kind of time transformation formally to the time-dependent Schrödinger equation. The Schrödinger equation subject to the duality transformation is a time-independent radial equation possessing a fixed energy and a fixed angular momentum. The classical time transformation is replaced in quantum mechanics by a renormalization of the time-independent state function [
41]. In summary, the duality transformation applicable to the Schrödinger equation consists of (i) a change of radial variable, (ii) an exchange of energy and coupling constant, and (iii) a transformation of state function. Having said so, when it comes to Feynman’s path integral approach, we should recognize that the classical procedure of regularization prevails.
Feynman’s path integral is based on the
c-number Lagrangian and, as Feynman asserted [
42], the path of a quantum particle for a short time
can be regarded as a classical path. Therefore, the local time transformation associated with the duality transformation in classical mechanics can be revived in path integration. In fact, the Newton–Hooke duality plays an important role in path integration. Feynman’s path integral in the standard form [
42,
43] provides a way to evaluate the transition probability from a point to another in space (the propagator or the Feynman kernel). The path integral in the original formulation gives exact solutions only for quadratic systems including the harmonic oscillator, but fails in solving the hydrogen atom problem. However, use of the KS transformation enables to convert the path integral for the hydrogen atom problem to that of the harmonic oscillator if the action of Feynman’s path integral is slightly modified with a fixed energy term. In 1979, Duru and Kleinert [
44], formally applying the KS transformation to the Hamiltonian path integral, succeeded to obtain the energy-dependent Green function for the hydrogen atom in the momentum representation. Again, with the help of the KS transformation, Ho and Inomata (1982) [
45] carried out detailed calculations of Feynman’s path integral with a modified action to derive the energy Green function in the coordinate representation. In 1984, on the basis of the polar coordinate formulation of path integral (1969) [
46], without using the KS variables, the radial path integral for the hydrogen atom was transformed to that for the radial harmonic oscillator by Inomata for three dimensions [
47] and by Steiner for arbitrary dimensions [
48,
49]. Since then a large number of examples have been solved by path integration [
50,
51]. Applications of the Newton–Hooke duality in path integration include those to the Coulomb problem on uniformly curved spaces [
52,
53], Kaluza–Klein monopole [
54], and many others [
51]. The idea of classical regularization also helped to open a way to look at the path integral from group theory and harmonic analysis [
50,
55,
56]. The only work that discusses a confinement potential in the context of path integrals is Steiner’s [
57].
As has been briefly reviewed above, the Newton–Hooke duality and its generalizations have been extensively and exhaustively explored. In the present paper we pursue the dual relation (power-duality) between two systems with arbitrary power-law potentials from the symmetry point of view. While most of the previous works deal with equations of motion, we focus our attention on the symmetry of action integrals under a set of duality operations. Our duality discussion covers the classical, semiclassical and quantum-mechanical cases. In
Section 2, we define the dual symmetry by invariance and reciprocity of the classical action in the form of Hamilton’s characteristic function and specify a set of duality operations. Then we survey comprehensively the properties of the power-duality. The energy-coupling exchange relations contained as a part of the duality operations lead to various energy formulas. In
Section 3, we bring the power-duality defined for the classical action to the semiclassical action for quantum mechanical systems. We argue that the power-duality is basically a classical notion and breaks down at the level of angular quantization. To preserve the basic idea of the dual symmetry in quantum mechanics, we propose as an ad hoc procedure to treat angular momentum
L as a continuous parameter and to quantize it only after the transformation is completed. A linear motion in a fractional power-law potential is solved as an example to find the energy spectrum by extended use of the classical energy formulas. We also discussed the dual symmetry of the supersymmetric (SUSY) semiclassical action. Although we are unable to verify general power duality, we find a way to show the Coulomb–Hooke symmetry in the SUSY semiclassical action.
Section 4 analyzes the dual symmetry in quantum mechanics on the basis of an action having wave functions as variables. The energy formulas, eigenfunctions and Green functions for dual systems are discussed in detail, including the Coulomb–Hooke problem. We also explore a quark confinement problem as an application of multi-power potentials, showing that the zero-energy bound state in the confinement potential is in the power-dual relation with a radial harmonic oscillator.
Section 5 gives a summary of the present paper and an outlook for the future work.
Appendix A presents the Newton–Hooke–Morse triality that relates the Newton–Hooke duality to the Morse oscillator.
2. Power-Law Duality as a Symmetry
Duality is an interesting and important notion in mathematics and physics, but it has many faces [
58]. In physics it may mean equivalence, complementarity, conjugation, correspondence, reciprocity, symmetry and so on. Newton’s law and Hooke’s law may be said dual to each other in the sense that a given orbit of one system can be mapped into an orbit of the other (one-to-one correspondence), whereas they may be a dual pair because the equation of motion of one system can be transformed into the equation of motion for the other (equivalence).
In this section, we pursue a view that the power duality is a symmetry of the classical action in the form of Hamiltonian’s characteristic function, and discuss the power duality in classical, semiclassical and quantum mechanical cases.
2.1. Stipulations
Let us begin by proposing an operational definition of the power duality. We consider two distinct systems, A and B. System A (or A in short), characterized by an index or a set of indices a, consists of a power potential and a particle of mass moving in the potential with fixed angular momentum and energy . Similarly, system B (B in short), characterized by an index or a set of indices b, consists of a power potential and a particle of mass moving in the potential with fixed angular momentum and energy .
If there is a set of invertible transformations that takes A to B, then we say that A and B are equivalent. Naturally, the inverse of denoted by takes B to A.
Let and be symbols for replacing the indices b by a and a by b, respectively. If B becomes A under and A becomes B under , then we say that A and B are reciprocal to each other with respect to . If A and B are equivalent and reciprocal, we say they are dual to each other. Since each of the two systems has a power potential, we regard the duality so stipulated as the power duality.
The successive applications of and transform A to B and change B back to A. Consequently the combined actions leave A unchanged. In this sense we can view that the set of operations, , or its inverse, , is a symmetry operation for the power duality.
If a quantity belonging to system A transforms to while takes system A to system B, then we write . If can be converted to by , then we write and say that is form-invariant under . If , then is an invariant under . If every belonging to system A is an invariant under , then is an identity operation.
2.2. Duality in the Classical Action
The power duality in classical mechanics may be most easily demonstrated by considering the action integral of the form of Hamilton’s characteristic function,
, where
S is the Hamilton’s principal function and
E is the energy of the system in question. The action is usually given by Hamilton’s principal function,
which leads to the Euler–Lagrange equations via Hamilton’s variational principle. If the system is spherically symmetric, that is, if the potential
is independent of angular variables, then the action remains invariant under rotations. If the system is conservative, that is, if the Lagrangian is not an explicit function of time, then the action is invariant under time translations. In general, if the action is invariant under a transformation, then the transformation is often called a symmetry transformation.
For a conserved system, we can choose as the action Hamilton’s characteristic function,
Insofar as the system is conservative, both the principal action
and the characteristic action
yield the same equations of motion. For the radial motion of a particle of mass
m with a chosen value of energy
E and a chosen value of angular momentum
L in a spherically symmetric potential
, the radial action has the form,
where
is the range of
t. We let a system with a specific potential
be system A and append the subscript
a to every parameter involved. In a similar manner, we let a system with
be system B whose parameters are all marked with a subscript
b. For system A with a radial potential
, we rewrite the action (
3) in the form,
with
where
is some fiducial time and
is the range of integration.
In (
4), as is often seen in the literature [
36,
40,
41], we change the radial variable from
r to
by a bijective differentiable map,
where
f is a positive differentiable function of
,
and
. With this change of variable we associate a change of time derivative from
to
by a bijective differentiable map,
In the above, we assume that both
r and
are of the same dimension and that
s has the dimension of time as
t does. As a result of operations
and
on the action (
4), we obtain
whose implication is obscure till the transformation functions
f and
g are appropriately specified.
Suppose there is a set of operations
, including
and
as a subset, that can convert
of (
8) to the form,
with
where
is a real function of
, and
is a constant having the dimension of energy. Then we identify the new action (
9) with the action of system
B representing a particle of mass
which moves in a potential
with fixed values of angular momentum
and energy
. If
where
and
, then
is form-invariant under
. Since
is physically identical with
, if
, then we say that system
A represented by
is dual to system
B represented by
with respect to
.
2.3. Duality Transformations
In an effort to find such a set of operations
, we wish, as the first step, to determine the transformation functions
of (
6) and
of (
7) by demanding that the set of space and time transformations
preserves the form-invariance of each term of the action. In other words, we determine
and
so as to retain (i) form-invariance of the kinetic term, (ii) form-invariance of the angular momentum term and (iii) form-invariance of the shifted potential term.
In the action
of (
8), the functions
and
are arbitrary and independent of each other. To meet the condition (i), it is necessary that
where
is a positive constant. Then the kinetic term expressed in terms of the new variable can be interpreted as the kinetic energy of a particle with mass
In order for the angular momentum term to keep its inverse square form as required by (ii), the transformation functions are to be chosen as
where
is a non-zero real constant and
is an
dependent positive constant which has the dimension of
as
r and
have been assumed to possess the same dimension. With (
12), the angular momentum term of (
8) takes the form,
, when the mass changes by
of (
11), and the angular momentum
transforms to
To date, the forms of
and
in (
12) have been determined by the asserted conditions (i) and (ii), even before the potential is specified. This means that (iii) is a condition to select a potential
pertinent to the given form of
. More explicitly, (iii) demands that
must be of the form,
where
is such that
. Therefore, the space-time transformation
subject to the form-invariance conditions (i)–(iii) is only applicable to a system with a limited class of potentials.
The simplest potential that belongs to this class is the single-term power potential
where
and
. The corresponding shifted potential is given by
which transforms with (
12) into
Under the condition (iii) the expected form of the shifted potential is
where
and
. Comparison of (
16) and (
17) gives us only two possible combinations for the new exponents and the new coupling and energy,
and
Note that is included in the first combination but excluded from the second combination.
In the following, we shall examine the two possible combinations in more detail by expressing the admissible transformations in terms of the exponents,
and separating the set of
into two as
Chandrasekhar in their book [
18] represents a pair of dual forces by
. In a way analogous to their notation, we also use the notation
via
for a pair of the exponents of power potentials when system
A and system
B are related by a transformation with
. We shall put the subscript F to differentiate the pairs of dual forces from those of dual potentials as
whenever needed. Caution must be exercised in interpreting
which may mean
,
and purely
(see the comments in below Subsections). We shall refer to the sets of pairs
related to the first combination (
18)–(
19) and the second combination (
20)–(
21) as Class I and Class II, respectively.
2.3.1. Class I
Class I is the supplementary set of self-dual pairs. Equation (
18) of the first combination implies
which is denoted by
via
. In this case, (
12) yields
and
where
and
are arbitrary dimensionless constants. With these transformation functions, (
6) and (
7) lead to a set of space and time transformations whose scale factors depend on neither space nor time,
and
Associated with the space and time transformations (
25) and (
26) are the scale changes in coupling and energy, as shown by (
19),
According to (
11), the mass also changes its scale,
From (
13) and (
24) follows the scale-invariant angular momentum (we use the subscript 0 for trivial transformations representing an identity),
In this manner we obtain a set of operations that leaves form-invariant the action for the power potential system. System B reached from system A by can go back to system A by . Hence, system A is dual to system B. Notice, however, that leads to a self-dual pair via for any given . In particular, .
Remark 1. Class I consists of self-dual pairs via for all . All pairs in this class are supplemental in the sense that they are not traditionally counted as dual pairs. Since is a qualified set of operations for preserving the form-invariance of the action, we include self-dual pairs of Class I in order to extend slightly the scope of the duality discussion.
Remark 2. The space transformation of (25) is a simple scaling of the radial variable as . The scaling is valid for any chosen positive value of . Hence it can be reduced, as desired, to the identity transformation by letting . Those dual pairs linked by scaling may be regarded as trivial. Remark 3. The scale transformation with induces the time scaling whereas the time has its own scaling behavior. The change in time (26) integrates to where ν is a constant of integration. The resulting time equation may be understood as consisting of a time translation , a scale change due to the space scaling , and an intrinsic time scaling . The time translation, under which the energy has been counted as conserved, is implicit in . The scale factor μ of time scaling, independent of space scaling, can take any positive value. If and , then becomes the identity transformation of time, . Remark 4. The scale change in mass is only caused by the intrinsic time scaling . If , then the mass of the system is conserved. Conversely, if is preferred, the time scaling with must be chosen. The time scaling in classical mechanics has no particular significance. In fact, it adds nothing significant to the duality study. Therefore, in addition to the form-invariant requirements (i)–(iii), we demand (iv) the mass invariance by choosing . In this setting the time scaling occurs only in association with the space-scaling. In accordance with the condition (iv), we shall deal with systems of an invariant mass m for the rest of the present paper.
Remark 5. If and , then operations, , , and , become identities of respective quantities. Thus, for and is the set of identity operations, which we denote . The set of operations for is trivial in the sense that it is reducible to the set of identity operations .
Remark 6. If Class I is based only on the scale transformation, it may not be worth pursuing. As will be discussed in the proceeding sections, there are some examples that do not belong to the list of traditional dual pairs (Class II). In an effort to accommodate those exceptional pairs within the present scheme for the duality discussion, we look into the details hidden behind the space identity transformation . The radial variable as a solution of the orbit equations, such as the Binet equation, depends on an angular variable and is characterized by a coupling parameter. In application to orbits, the identity transformation means , which occurs when . The angular transformation where causes a rotation of a given orbit about the center of force by . For instance, the cardioid orbit in a potential with power maps into by a rotation . This example belongs to the self-dual pair via . In this regard, we argue that the identity transformation includes rotations about the center of forces. Of course, the rotation with is the bona fide identity transformation.
Remark 7. Suppose two circular orbits pass through the center of attraction. It is known that the attraction is an inverse fifth-power force. If the radii of the two circles are the same, then the inverse fifth-power force is self-dual under a rotation. If the radii of the two circles are different, the two orbiting objects must possess different masses. A map between two circles with different radius, passing through the center of the same attraction, is precluded from possible links for the self-dual pair by the mass invariance requirement (iv).
Remark 8. If in (25), either r or ρ must be negative contrary to our initial assumption. However, when we consider the mapping of orbits, as we do in Remark 6, we recognize that there is a situation where the angular change induces . For instance, consider an orbit given by a conic section where and . If , then it is possible to find such that by . Consequently the image of the given orbit is . Certainly the result is unacceptable. The latus rectum p is inversely proportional to . Hence in association with the sign change in coupling , we are able to obtain a passable orbit . The orbit mapping of this type cannot be achieved by a rotation. To include the situation like this in the space transformation, we formally introduce the inversion,and treat it as if the case of . Then we interpret the negative sign of the radial variable as a result of a certain change in the angular variable θ involved in the orbital equation by associating it with a sign change in coupling so that both r and ρ remain positive. If , the inversion causes no change in time, mass, energy, and angular momentum, but entails, as is apparent from (27), a change in coupling, The inversion set with and , denoted by , is partially qualified as a duality transformation. The reason why is ”partially” qualified is that it is admissible only when a is an integer. Notice that appearing in (31) is a complex number unless a is an integer. As and are both assumed to be real numbers, a must be integral. Having said so, in the context of the inversion, we need a further restriction on a. The sign change in coupling is induced by the inversion only when a is an odd number. Since is not generally reducible to the identity set , it is non-trivial. 2.3.2. Class II
Class II is the set of proper (traditional) dual pairs. Equation (
20) of the second combination can be expressed as
which implies that a pair
is linked by
when
. The above operation
may as well be given by
which means a pair
linked via
. Another expression for
is
which is a version of what Needham [
22,
23] calls the Kasner–Arnol’d theorem for dual forces. If
and
,
from which follows that to every
via
there corresponds
via
if
. If
, then
and
. Hence
via
, which overlaps with
of Class I in the limit but differs in approach. In the above
stand for
with a fixed
a.
In this case, the transformation functions of (
12) can be written as
and
where
. Here we choose
by the reason stated in Remark 4. The change of radial variable (
6) and the change of time derivative (
7) become, respectively,
and
Equation (
21) of the second combination, associated with
, yields the coupling-energy exchange operation,
The time scaling has been chosen so as to preserve the mass invariance (
11),
and the scale change in the angular momentum follows from (
13) with
,
Now we see that each of the sets
preserves the form-invariance of the action (
4) with a power potential. The form-invariance warrants that
. Hence system
B is dual to system
A with respect to
. Let
. The set
links
and
of
, whereas
relates
to
. No
links
to
. Hence there is no pair
consisting of
and
.
Remark 9. Class II consists of proper dual pairs linked by , which have been widely discussed in the literature [10,18,22,23,24,36,40]. Here a and b are distinct except for two self-dual pairs, via and via . Remark 10. Note that the time transformation (37) is not integrable unless the time-dependence of the space variable (i.e., the related orbit) is specified. Remark 11. The scale factor appeared in Case I was dimensionless. A space transformation of (12) for a given value of contains a constant which has a dimension of . Let where and are a dimensionless magnitude and the dimensional unit of , respectively. Use of an appropriate scale transformation which is admissible as seen in Case I enables to reduce to unity. More over, the dimensional unit may be suppressed to . Therefore, if desirable, the space transformation (36) may simply be written as without altering physical contents. Remark 12. Let be a dual pair satisfying the relation . Then the left element of maps via into , and the right element into . Hence the self-dual pair can be taken by to the self-dual pair . Schematically,We call a grand dual pair. 2.4. Graphic Presentation of Dual Pairs
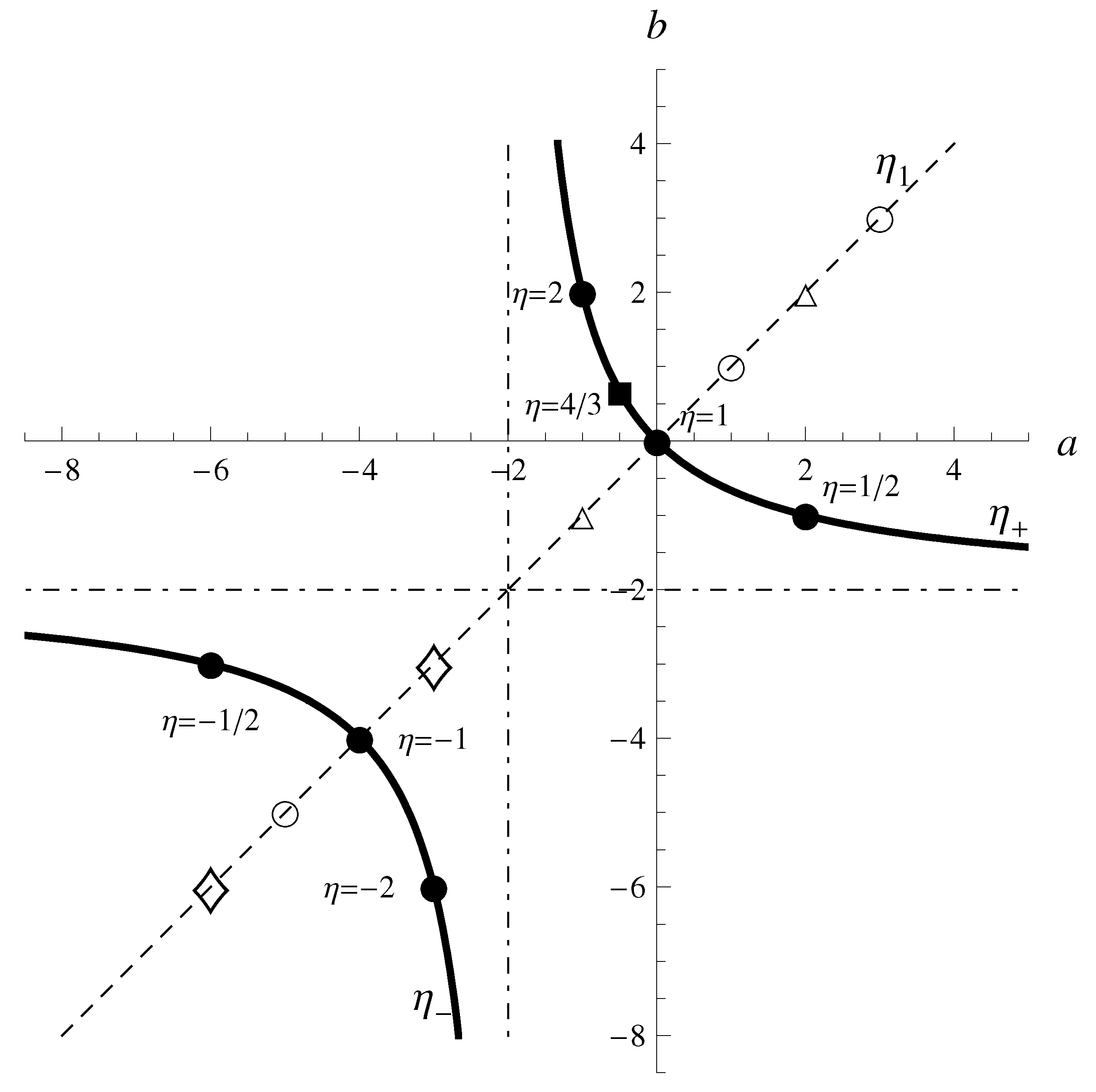
A dual pair
is presented as a point in a two-dimensional
plane as shown in
Figure 1. All self-dual pairs
of Class I are on a dashed straight line
denoted by
. Every dual pair
of Class II is shown as a point on two branches
of a hyperbola described by the equation
of (
34). The graph for Class II is similar to the one given by Arnol’d for dual forces [
10].
Among the dual pairs of Class I, there are pairs linked by scale transformations (inclusive of rotations), which cover all real a, and those related by the inversion, which are defined only when a is an odd number. In this regard, every pair , occupying a single point on , plays multiple roles. While the pairs linked by scale transformations admissible for all real values of a form a continuous line indicated by a dashed line, those pairs linked by the inversion appear as discrete points on and are indicated by circles.
The hyperbola representing all pairs of Class II has its center at , transverse axis along , and asymptotes on the lines and . The bullets indicate all pairs via with integral a’s; namely, via , via , via , and via . There are no integer pairs other than those listed above in Class II. The square represents the dual pair to be discussed in Section III D. On the branch of , a dual pair via and its inverse pair via are symmetrically located about the transverse axis . Since both and signify that system A and system B are dual to each other, the curves have redundancy in describing the duality. An example is the Newton–Hooke duality for which two equivalent pairs via and via appear in symmetrical positions on .
We notice that there are two special points on the graph. They are the intersections of and ; namely, with , and with . The former is an overlapping point of and where . The latter is like an overhead crossing of and where the pair belonging to is linked by a transformation with while the one belonging to is linked with .
In approaching the crossing of
and
, the pair
at
has a limiting behavior as
, while
at
behaves like
via
. As has been mentioned earlier,
. However, the counterpart of
is not exactly equal to
. The potential corresponding to the inverse force
is
. Thus, it is more appropriate to put symbolically
. Yet,
. Consider
. For
small,
, which gives rise to the force
where
. As long as
can be treated as finite,
. Chandrasekhar [
18] excluded
from the list of dual pairs on physical grounds. We exclude
because the logarithmic potential, being not a power potential, lies outside our interest.
By analyzing Corollaries and Propositions in the Principia, Chandrasekhar [
18] pointed out that Newton had found not only the Newton–Hooke dual pair but also the self-dual pairs
,
and
. He also mentioned that
was not included in the Prinpicia. For
a integral, there are only two grand dual pairs
and
. In
Figure 1,
and
are marked with triangles on
, while
and
are marked with diamonds on
.
2.5. Classical Orbits
Here we discuss the orbital behaviors for the dual pairs in relation with energy and coupling.
First, we consider self-dual pairs
of Class I. If an effective shifted potential is defined by
, the space transformation
induces
resulting in self-dual pairs
for any real
a. The space transformation includes scale transformations
with
, identity transformation
(inclusive of rotations), and inversion formally defined by
.
Statement 1. System A and system B linked by a scale transformation are physically identical but described in different scale. Typically an orbit of system A maps to an orbit of system B similar in shape but different in scale.
Statement 2. In the limit , the two orbits become congruent (identical) to each other. Any self-dual pair due to a scale transformation is reducible to a trivial pair linked by the identity transformation. However, in dealing with the orbital behaviors, we have to look into the angular dependence of radial variables by allowing the identity transformation to contain with , which represents a rotation of a given orbit about the center of force by .
The inversion
entails
, as is apparent from (
41). If
a is an even number, the sign change in coupling does not occur. Hence the inversion for even
a cannot properly be defined and must be precluded. Only when
a is odd, the inversion is meaningful. However, we have to notice that orbits in a potential with
are all bounded if
and all unbounded if
. Under the inversion, the sign of
changes, so that a bound orbit with
is supposed to go to an unbounded orbit with
. It is uncertain whether there are such examples to which the inversion works.
Statement 3. If a is a negative odd number, under the inversion, an orbit in an attractive (repulsive) potential maps to an orbit in a repulsive (attractive) potential, keeping the energy unchanged.
In the Principia, Newton proved that if an orbit passing through the center of attraction is a circle then the force is inversely proportional to the fifth-power of the distance from the center (Corollary I to Proposition VII). From Corollary I of Proposition VII and other corollaries in the Principia Chandrasekhar [
18] shows in essence that if an object moves on a circular orbit under centripetal attraction emanating from two different points on the circumference of the circle then the forces from the two points exerted on the orbiting object are of the same inverse fifth-power law. Then he suggests, in this account, that the inverse fifth power law of attraction is self-dual for motion in a circle. In contrast to Chandrasekhar’s view on the self-dual pair
, we maintain that
can be understood as a member of Class I and Class II. The circular orbit in an attractive potential
, which occurs when
, can be described by the equation
where
is the radius of the circle and
is the range of
. The scale transformation
with
converts the orbit equation into
where
. Apparently it is consistent with the requirements
and
of (
41). Thus, the radius of the circle is rescaled while the center of force is fixed at the origin and the range of
is unaltered. The inverse fifth-power law of attraction may be viewed as self-dual under a scale change for motion in a circle. If the identity map
may include a rotation
, then
with the angular range
. In particular, if
, then
with
. The circular orbit maps into itself, though rotated about the center of force. In this sense, the inverse fifth-power law of attraction is self-dual under a rotation for motion in a circle. In much the same way, the inverse fifth-power force, whether attractive or repulsive, may be considered as self-dual under a scale change and a rotation for motion in any other orbits. Hence the self-dual pair
linked by the scale transformation (including rotations) is a member of Class I. The same self-dual pair
has another feature as a member of Class II which will be discussed in Remark 13.
Secondly, we consider dual pairs of Class II.
All dual pairs of Class II are subject to the proper dual transformation . The members a and b of each pair obey the Kasner–Arnol’d formula , and are related via (or if ). These dual pairs belong to branch if , and branch if .
Now the space and time transformations
and
induce the energy-coupling exchange,
where
and
. Hence the effective shifted potential transforms as
where
and
.
The two equations in (
42) are not simply to exchange the roles of energy and coupling. They also provide a useful relation between
and
. In general
depends on
. So we let
, and invert it as
with the help of the first equation of (
42). Substitution of this into the second equation of (
42) yields
which shows that
depends on
through the coupling
.
Statement 4. For a dual pair of Class II, if the coupling dependence of is explicitly known, then can be determined by (44), and vice versa. From (
42) there follow four possible mapping patters,
In the above, pattern (0) implies that any zero energy orbit of system A goes to a rectilinear orbit of system B with no potential. Patterns (1)–(4) imply that any positive energy orbit of system A, regardless of the sign of , maps to an orbit of system B with a coupling , and any negative energy orbit of system A, independent of , maps to an orbit of system B with a coupling .
The dual pairs of Class II can be grouped into those on and those on . Furthermore, the pairs of the first group can be divided into two parts for and . If we let denote the part for , then . Similarly, let denote the part for . Then . Thus, . It is sufficient to consider the set . The same can be said for the second group on . We take up only the set .
For the case of
,
implies a repulsion (attraction), while
means an attraction (repulsion). There are no negative energy orbits in a repulsive potential with
and in an attractive potential with
. For
, both
and
are repulsive, and both
and
are attractive. In any repulsive potential with
or
, no negative energy orbits are present. Pattern (4) is not physically meaningful. Taking these features of potentials into account, we can restate the implication of the relations in (
42) as follows.
Statement 5. Under the proper duality transformation , if (i.e., ), then any positive energy orbit in the potential of system A, whether attractive or repulsive, maps to an orbit in a repulsive potential of system B, and any negative energy (bound) orbit maps to a positive energy (bound) orbit in an attractive potential. If (i.e., ), then the above situations are reversed. If (i.e., ), then any positive orbit in an attractive potential maps to a positive orbit under attraction, any negative bound orbit in an attractive potential maps to a positive orbit under repulsion, and any positive orbit under repulsion maps to a negative bound orbit in an attractive potential. Even for the case where (i.e., ), the mapping patterns are the same as those for . In all cases, zero energy orbits map to force-free rectilinear orbits.
This is a modified version of Needham’s statement made in supplementing the Kasner–Arnol’d theorem [
22,
23].
Remark 13. The pair has another feature as a point on , that is, as a member of Class II. From (42), it is obvious that for the circular zero energy orbit. Hence the duality transformation maps the orbit into a force-free rectilinear orbit. According to Statement 5, any positive energy orbit must map to an orbit in an attractive potential, and any negative energy orbit maps to an orbit in a repulsive potential. Therefore, the self-dual pair Newton established is not a member of Class II. It must be on , belonging to Class I. In what follows, we make remarks on the Newton–Hooke pairs and related self-dual pairs.
Remark 14. Statement 5 applies to the pair . The mapping patterns (0)–(3) works in going from the Newton system with to the Hooke system with . Namely, (0) the zero energy orbit of the attractive Newton system maps to a rectilinear orbit; (1) a positive unbound orbit of the attractive Newton system maps to a positive unbound orbit of the repulsive Hooke system; (2) a negative energy bound orbit of the attractive Newton system maps to a positive energy bound orbit of the attractive Hooke system; and (3) a positive unbound orbit of the repulsive Newton system maps to a negative unbound orbit of the repulsive Hooke system. Since there are no negative orbits for the repulsive Newton system and the attractive Hooke system, pattern (4) is irrelevant.
Remark 15. In view of the orbit structure, we study in more detail the mapping process from the Newton system to the Hooke system. As is well-known, for the motion in the inverse-square force, the orbit equation in polar coordinates has the form,where p is the semi-latus rectum, e the eccentricity. The orbit is of conic sections and the origin of the coordinates is at the focus closest to the pericenter of the orbit. The angle θ is between the position of the orbiting object and the direction to the pericenter located at and . The semi-latus rectum, the semi-major axis, and the eccentricity of the orbit are determined by , , and , respectively. If the inverse square force is attractive, i.e., if , then , , and . If repulsive, i.e., if , then , and . (i) For the bound motion, , and . The Equation (45) describes an elliptic orbit with semi-major axis and eccentricity e. Apparently, . For the duality mapping, a more suited choice is the orbit equation expressed in terms of the eccentric anomaly ψ, which may be put in the form,Here ψ is related to the polar angle θ by . Since , use of (47) leads towhere Let in cartesian coordinates, and let Then it is clear that the trajectory drawn by ρ is given as an ellipse,with semi-major axis α and semi-minor axis β, centered at the origin of the plane. It is obvious that is the semi-minor axis of the ellipse on the plane. The above calculation shows that the elliptic Kepler orbit with semi-major axis and eccentricity e maps to an ellipse with semi-major axis and eccentricity . The semi-major and semi-minor axes of the resultant ellipse depend on the scaling factor . With different values of , a Kepler ellipse of eccentricity e is mapped to ellipses of different sizes having a common eccentricity ϵ. In general, the resultant ellipse having eccentricity ϵ is not similar to the Kepler orbit with eccentricity e. If , then . Namely, a circular orbit of radius under an inverse-square force maps to a circle with radius . With a particular scale , the mapped circle is congruent to the original orbit. In the limit , the Kepler orbit becomes a parabola with , which maps to a force-free rectilinear orbit described by . (ii) If , then and for . The semi-latus rectum in (45) must be modified as . Again . The orbit is a branch of a hyperbola with semi-major axis and eccentricity e. The center of attraction is at the interior focus of the branch, so that . In much the same fashion that the eccentric anomaly is used in (46), we introduce a parameter ψ related to the angle θ by . Here . Now the orbit equation in parametric representation iswhich may further be written aswhose minimum occurs when . Correspondingly, is expressed aswhere Hence . Lettingwe obtain and the equation for a hyperbola having two branches,which has the semi-major axis and the eccentricity . Thus, the positive energy orbit in the attractive inverse potential, given by a branch of the hyperbola, maps to a positive energy orbit given by either branch of a hyperbola whose center coincides with the center of the repulsive Hooke force. (iii) For a repulsive potential with such as the repulsive Coulomb potential, the orbit Equation (45) describing a hyperbola holds true insofar as , i.e., . Since for , the semi-lotus rectum must be replaced by . At the same time, the angular variable has to be changed from θ to where and . The conversion of the hyperbolic Equation (45) for the attractive potential to the hyperbolic equation for the repulsive potential,is indeed the inversion process mentioned in Remark 8. Since (45) and (58) have the same form, we can follow the procedure given in (ii) to show that under the positive energy orbit in the repulsive inverse potential, given by a branch of the hyperbola, maps to a negative energy orbit given by either branch of a hyperbola whose center coincides with the center of the repulsive Hooke force. Remark 16. In connection with Remark 14, we look at the self-dual pairs and which do not belong to Class II. Apparently the two pairs are closely related to each other via the Newton–Hooke pair , so as to form a grand dual pair . As they are both on , each of them is self-dual under scale changes and rotations. In addition, is self-dual under the inversion. From (iii) of Remark 15, it is clear that due to the inversion the orbit equation takes the form (45). There the angular range for is where . Hence the resultant orbit has the center of orbit at the exterior focus. This means that a hyperbolic orbit in attraction with the center of force at the interior focus maps to the conjugate hyperbola in repulsion with the center of force at the exterior focus. In contrast, any rotation maps a hyperbolic orbit under attraction (repulsion) into a hyperbolic orbit under attraction (repulsion). In summary, the inversion maps a hyperbolic orbit under attraction into a hyperbolic orbit under repulsion, whereas any rotation takes a hyperbolic orbit under attraction (repulsion) to a hyperbolic orbit under attraction (repulsion). According to Chandrasekhar’s book [18], what Newton established for and are that the attractive inverse square force law is dual to the repulsive inverse square force law, and that the repulsive linear force law is dual to itself. Thus, we are led to a view that Newton’s is due to the inversion and their is due to a rotation. Finally we wish to point out that by the mapping patterns (1) and (3) of a hyperbolic orbit of the attractive Newton system, whether attractive or repulsive, maps to a hyperbolic orbit of the repulsive Hooke system. In other words, the pair of forces for goes to the pair of force for with the help of . This is compatible with the assertion that Newton’s two self-dual pairs form the grand dual pair via . 2.6. Classical Energy Formulas
We have used the energy-coupling exchange relations,
as essential parts of the power-duality operations. They demand primarily that the roles of energy and coupling be exchanged. Using these relations, we can also derive energy formulas which enable us to determine the energy value of one system from that of the other when two systems are power-dual to each other.
In general
depends on
,
and possibly other parameters. So let the energy function be
where
represents those additional parameters. Then we pull
out from the inside of
as
Now we insert this coupling parameter
into the first equation of (
59). Substituting the second relation
and the angular momentum transformation
to the right-hand side of (
60), we can convert the first relation of (
59) into an energy formula,
Thus, if
is known, then
can be determined without solving the equations of motion for system
B. By making an appropriate choice of
C, the value of
may be specified by the second relation of (
59).
Alternatively, let us combine the two relations in (
59) by eliminating the constant
C to get another energy formula,
This formula can be rearranged to the symmetric form,
Note that the signs of the energies and coupling constants are related via (
59). See also the four patterns discussed in
Statement 4 above.
When the parameters
w contained in
are invariant, that is,
, under the duality operations, the last equation suggests that there is some positive function
, independent of
and
, such that
where
. If such a function is specified for
by (
64), then
can be determined by (
65) with the sign to be obtained via (
59). Notice that (
65) is useful as an energy formula to find
only when
has the form of (
64).
Remark 17. As an example, let us consider the Newton–Hooke dual pair for which , and . Let system A be consisting of a particle of mass m moving around a large point mass under the influence of the gravitational force with . Let system B be an isotropic harmonic oscillator with . Then, as the exchange relations of (59) demand, and . Hence the orbits of the two systems are bounded. This means that the Newton–Hooke duality occurs only when both systems are in bound states. Suppose the total energy of the particle is given in the form,
where
is the minimum value of the radial variable
r and
. Then we obtain the inverse function,
With this result, the Formula (
60) immediately leads to the energy of the Hooke system in the form,
where
and
. Although
may be interpreted as Hooke’s constant, its detailed form
cannot be determined by the energy formula. Noticing that
is a constant, we let
. If we choose
, then we have
from the second relation of (
59). With the same choice of
C, we have
.
Suppose the energy of system
A is alternatively given in the form,
where
J is the radial action variable,
, or more explicitly,
which is a constant of motion. Let
of (
69) be put into the form given via (
64) then we may identify
Since the first relation of (
59) indicates that
for
, the relation (
65) together with
results in
which is an energy expression of the Hooke system obtainable from the Hamilton- Jacobi equation.
2.7. Generalization to Multi-Term Power Laws
In the following, on a parallel with Johnson’s treatment [
36], we examine how the duality can be realized with a sum of power potentials (i.e., a multi-term potential) in the present framework.
Let the potential
be a sum of
N distinct power potentials as
where
is the coupling constant of the
i-th sub-potential in
. Then
and
take the shifted potential in (
16) to
Let us pick one of the terms in the sum in (
75), say, the
term, and make its exponent zero by letting
where
is
k-dependent. If the exponent of the
term, instead of the
term, is made vanishing, then
is to be given in terms of
where
. Since
, there are
N possible choices of
. Thus, it is appropriate to write
in (
76) with the subscript
k as
. Apparently,
is a possible one of
. Let the operations
and
for
be denoted by
and
, respectively.
For the remaining potential terms
and the energy term in (
75), we rename the exponents of
as
which can easily be inverted to express
and
in terms of
and
in the same form. These relations are equivalent to the conditions on the exponents,
From (
77) there also follows
for all
i if
for all
i. The first relation of (
78) leads to alternative but equivalent expressions of
in (
76),
To
and
, we have to add two more operations,
and
Then, we express the shifted potential of (
75) in the new notation as
where
The set of operations
transforms the radial action of the
A system into
Thus, we find the duality between the A-system and -system with respect to . Again, this duality is only one of the N dualities; there are N pairs of dual systems, for .
5. Summary and Outlook
In the present paper we have revisited the Newton–Hooke power-law duality and its generalizations from the symmetry point of view.
(1) We have stipulated the power-dual symmetry in classical mechanics by form-invariance and reciprocity of the classical action in the form of Hamilton’s characteristic function, and clarified the roles of duality operations . The exchange operation has a double role; it may decide the constant C appearing in the transformation , while it leads to an energy formula that relates the new energy to the old energy.
(2) We have shown that the semiclassical action is symmetric under the set of duality operations without insofar as angular momentum L is treated as a continuous parameter, and observed that the power-duality is essentially a classical notion and breaks down at the level of angular quantization. To preserve the basic spirit of power-duality in the semiclassical action, we have proposed an ad hoc procedure in which angular momentum transforms as , as the classical case, rather than ; after that each of L is quantized as with . As an example, we have solved by the WKB formula a simple problem for a linear motion in a fractional power potential.
(3) We have failed to verify the dual symmetry of the supersymmetric (SUSY) semiclassical action for an arbitrary power potential, but have succeeded to reveal the Coulomb–Hooke duality in the SUSY action.
(4) To study the power-dual symmetry in quantum mechanics, we have chosen the action in which the variables are the wave function and its complex conjugate and from which the radial Schrödinger equation can be derived. The potential appearing in the action is a two-term power potential. We have shown that the action is symmetric under the set of operations plus the transformation of wave function provided that angular momentum L is a continuous parameter. Again the ad hoc procedure introduced for the semiclassical case must be used in quantum mechanics. Associated with is the transformation of Green functions from which we have derived a formula that relates the new Green function and the old one. We have studied the Coulomb–Hooke duality to verify the energy formula and the formula for the Green functions. We also discussed a confinement potential and the Coulomb–Hooke–Morse triality.
There are more topics that we considered important but left out for the future work. They include the power-dual symmetry in the path integral formulation of quantum mechanics, the Coulomb–Hooke duality in Dirac’s equation, and the confinement problem in Witten’s framework of supersymetric quantum mechanics. Feynman’s path integral is defined for the propagator (or the transition probability) with the classical action in the form of Hamilton’s principal function, whereas the path integral pertinent to the duality discussion is based on the classical action in the form of Hamilton’s characteristic function. Since the power-dual symmetry of the characteristic action has been shown, it seems obvious that the path integral remains form-invariant under the duality operations, but the verification of it is tedious. As is well-known, Dirac’s equation is exactly solvable for the hydrogen atom. There are also solutions of Dirac’s equation for the harmonic oscillator. However, the Coulomb–Hooke duality of Dirac’s equation has never been established. The situation is similar to Witten’s model of SUSYQM. Using the same superpotential as that used for the semiclassical case in
Section 4, we may be able to show the Coulomb–Hooke symmetry and handle the confinement problem in Witten’s framework.






{kind=link}
{kind=link}