
Identifying the Locations of Atmospheric Pollution Point Source by Using a Hybrid Particle Swarm Optimization

Abstract
:1. Introduction
2. Preliminaries
2.1. Introduction to Particle Swarm Optimization (PSO)
- •
- P is the swarm’s size.
- •
- is the inertia weight.
- •
- and are two positive constants, which are called cognitive and social parameter, respectively.
- •
- and are two random numbers uniformly distributed within range .
- •
- is the i-th particle of the D-dimensional in n-th iteration.
- •
- is the best previous position of i-th particle in n-th iteration.
- •
- is the best position of the swarm in n-th iteration.
- •
- is velocity of i-th particle in n iteration.
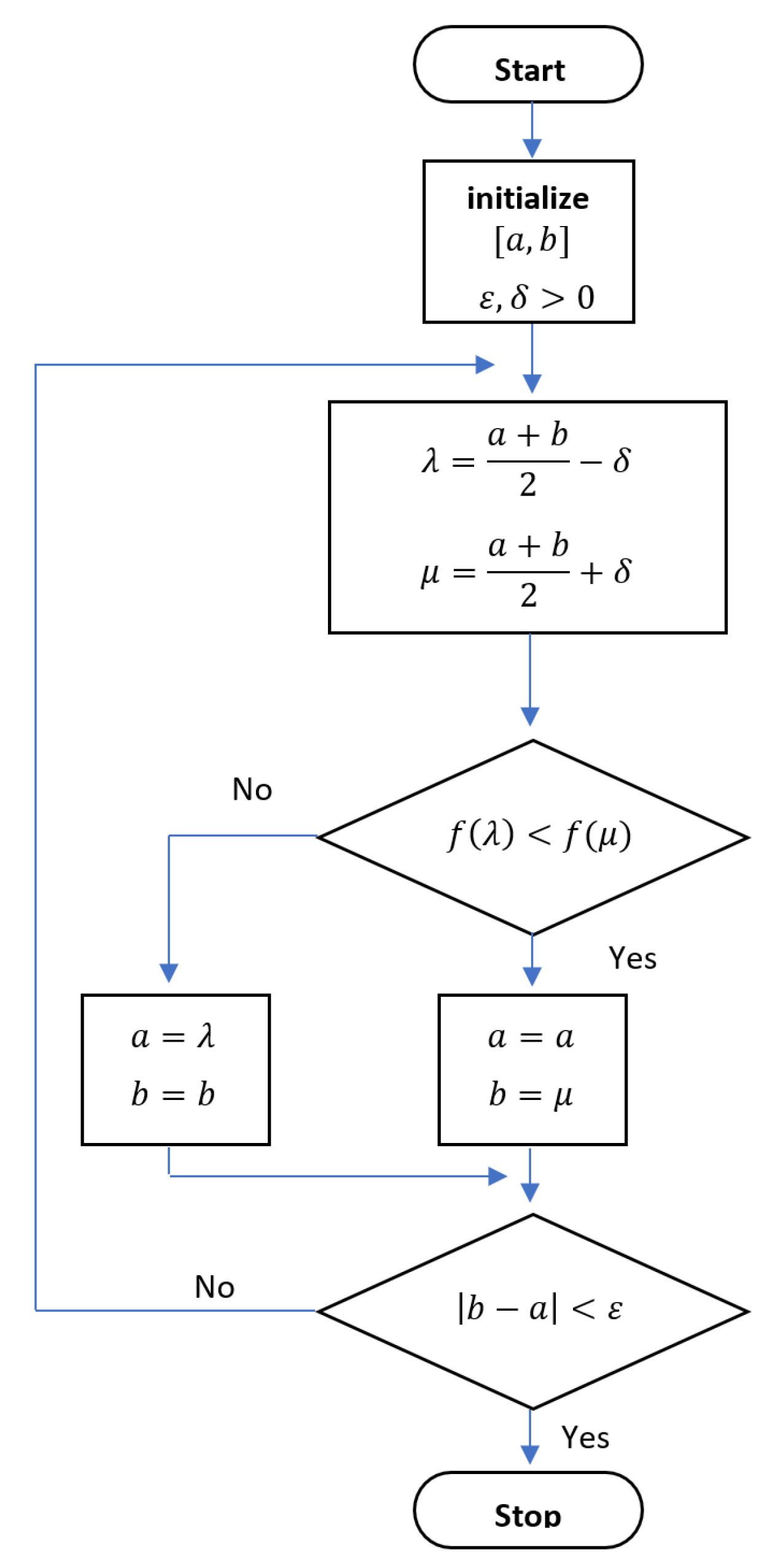
2.2. Dichotomous Search Method
- Consider and given below.
- If then and . Otherwise, let and .
- If , stop. Give and do step 1.
2.3. Cyclic Coordinate Method
- Begin with finding the optimal solution from minimizing the problemand then let
- If , replace j by and repeat step 1. Otherwise, if , go to step 3.
- Let . If , then stop. Otherwise, give and , surrogate k by and go to step 1.
3. Methodology
3.1. Hybrid Particle Swarm Optimization Method (HPSO)
3.1.1. Optimization Problem Formulation
- •
- The foul gas is discharged at a constant rate Q (kg/s) form the source , which is placed at height H above the ground surface.
- •
- The wind velocity is constant and aligns in the x-axis direction, which is written as when has a unit of m/s.
- •
- The solution is in steady state, which makes the wind velocity and other functions independent of time.
The HPSO for Identifying the Single Air Pollution Location and Its Emission Rate
The HPSO for Identifying the Two Air Pollution Locations and Their Emission Rates
| Algorithm 1. HPSO algorithm. |
|
4. Numerical Results
4.1. Complexity
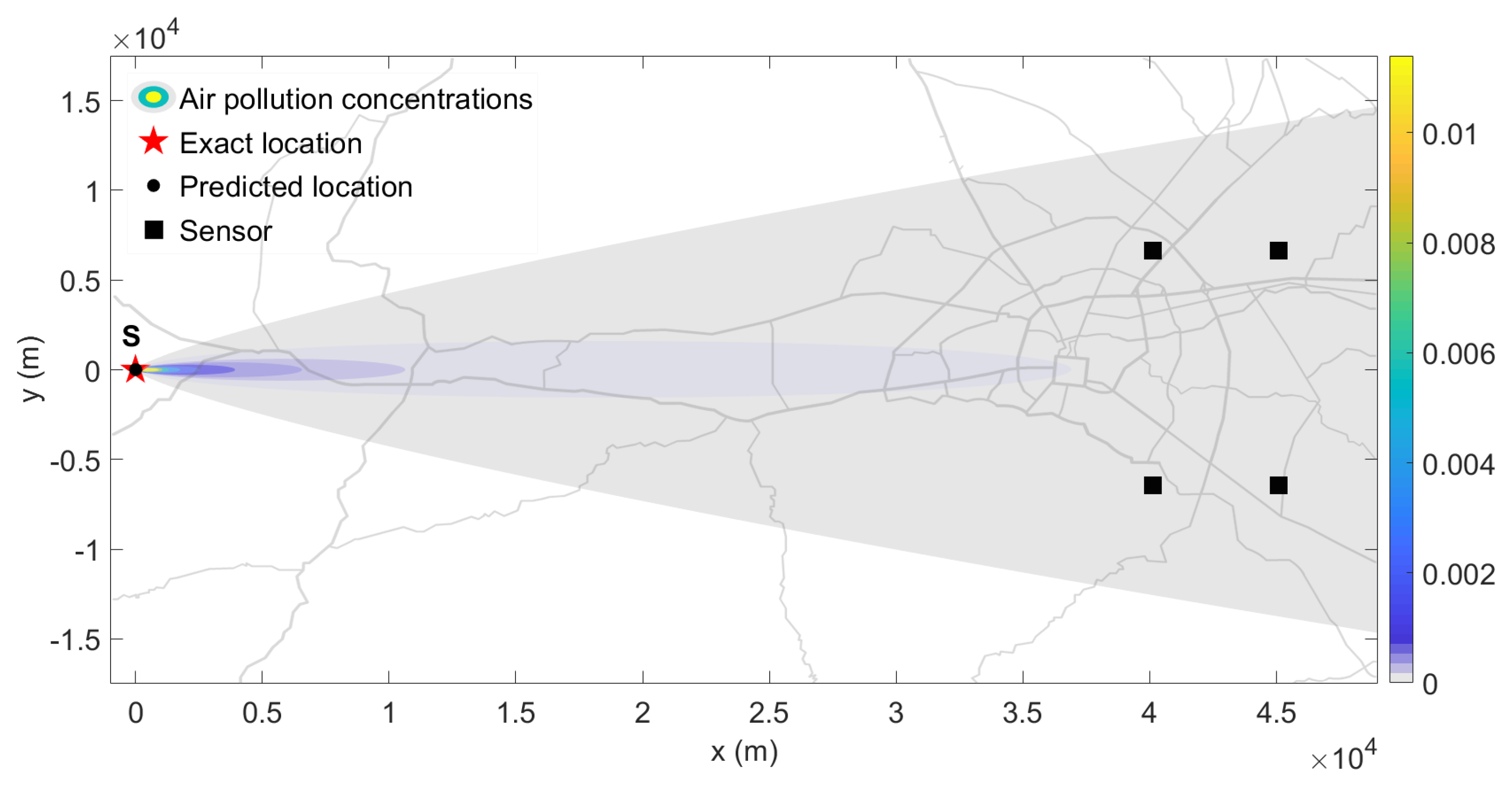
4.2. The Results in Two-Dimensional Domains
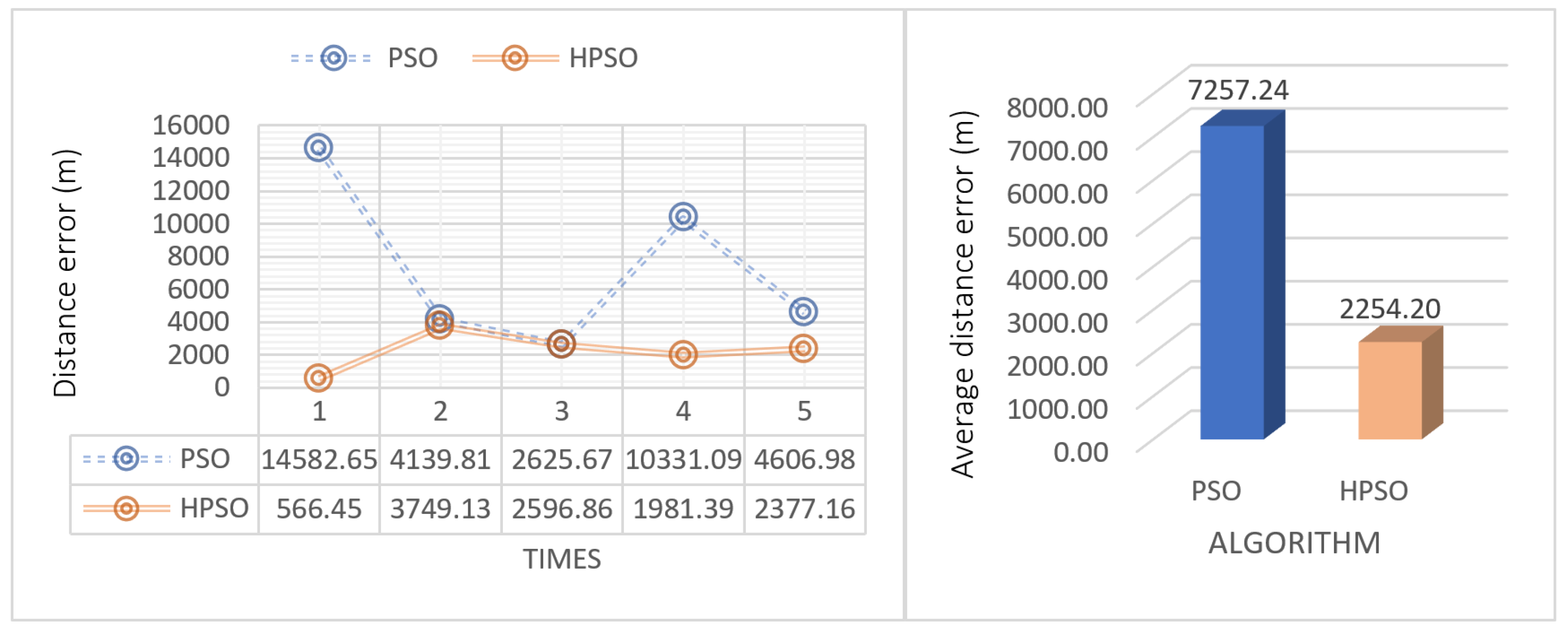
4.2.1. Identification the Air Pollution Locations without Finding Emission Rate in Two Dimensions
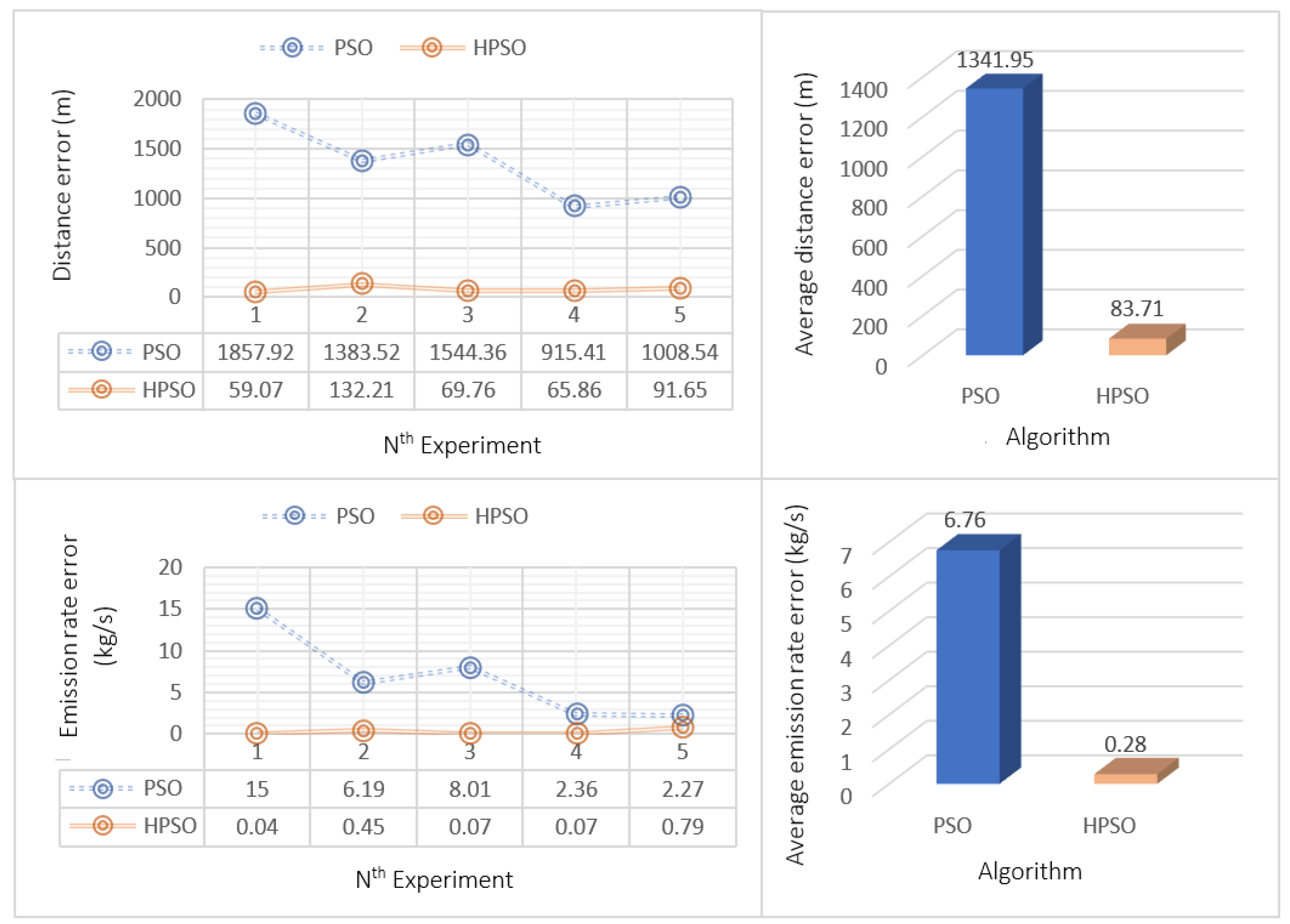
4.2.2. Identification the Air Pollution Locations and Emission Rate in Two Dimensions
4.3. The Result in Three Dimensional Domains
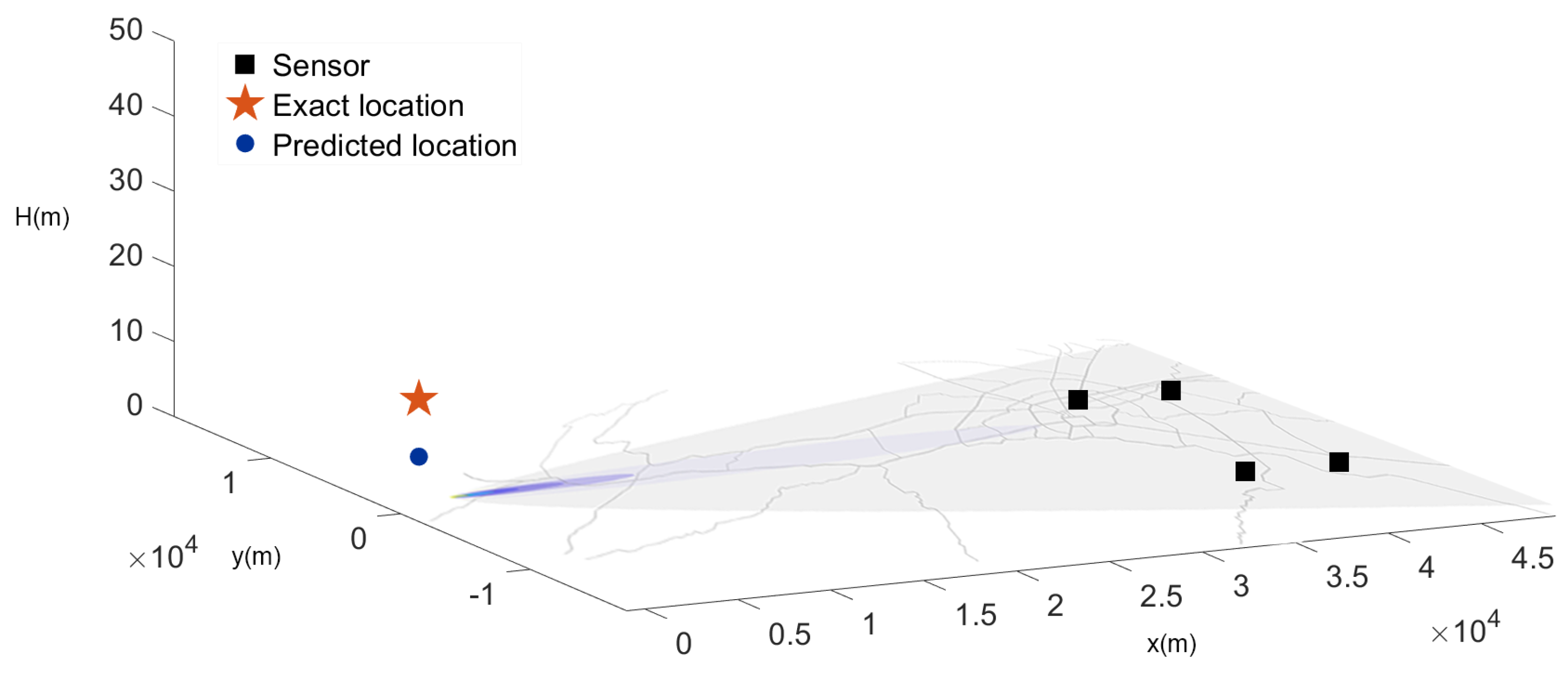
4.3.1. Identification the Air Pollution Locations and Emission Rate in Three Dimensions
4.3.2. Identification the Air Pollution Locations without Finding Emission Rate in Three Dimensions
4.4. The Result with a Numerical Method in PDE
4.4.1. Numerical Method
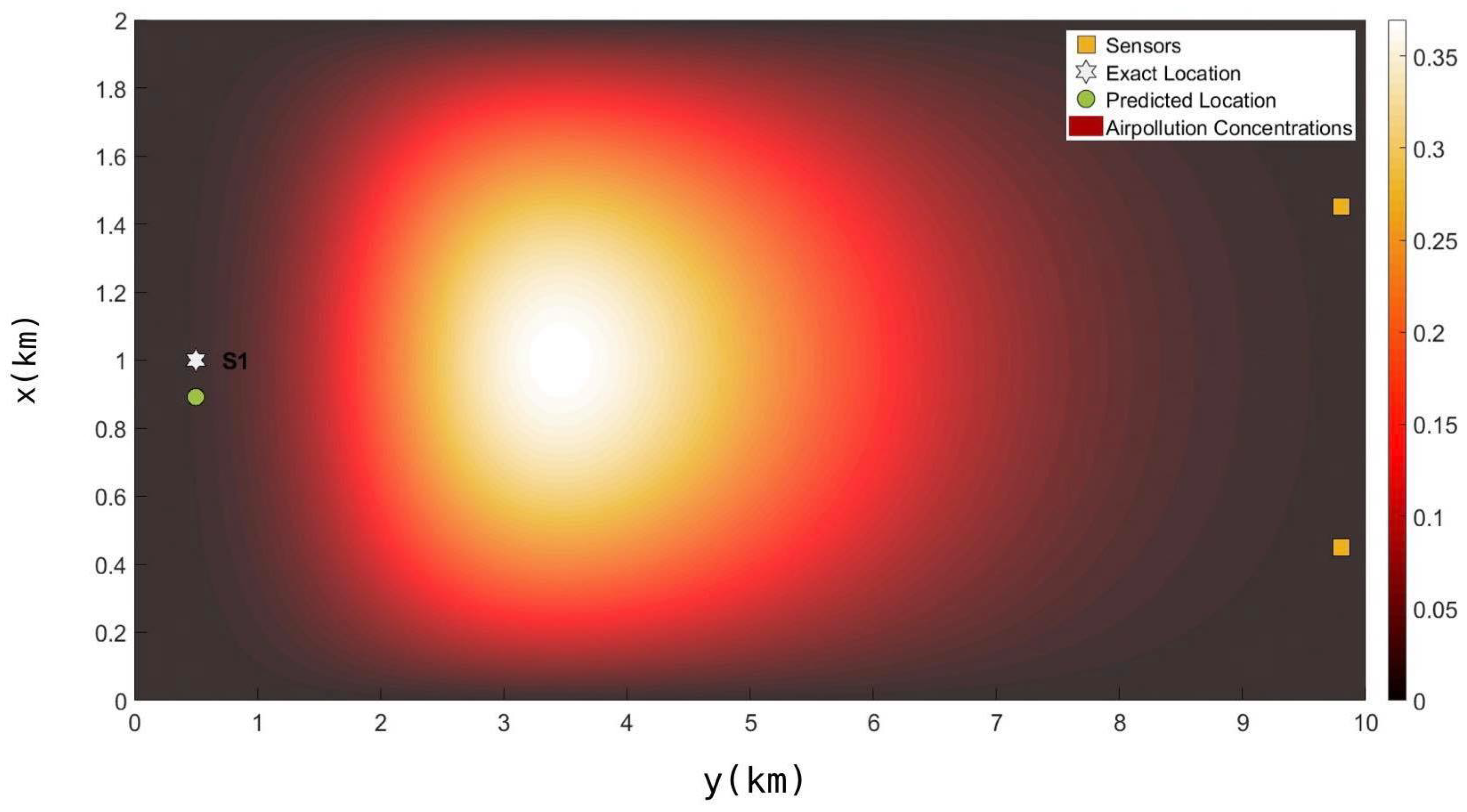
4.4.2. Results of Identifying Single Pollution Point Source
- •
- Domain size: 10 × 2
- •
- The number of particles is 10
- •
- The number of iterations is 30
- •
- Exact location is (0.5, 1)
5. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Acknowledgments
Conflicts of Interest
References
- Khedo, K.K.; Perseedoss, R.; Mungur, A. A wireless sensor network air pollution monitoring system. arXiv 2010, arXiv:1005.1737. [Google Scholar] [CrossRef]
- Hasenfratz, D.; Saukh, O.; Sturzenegger, S.; Thiele, L. Participatory air pollution monitoring using smartphones. Mob. Sens. 2012, 2, 1–5. [Google Scholar]
- James, J.Q.; Li, V.O.K.; Lam, A.Y.S. Sensor deployment for air pollution monitoring using public transportation system. In Proceedings of the 2012 IEEE Congress on Evolutionary Computation (CEC), Brisbane, Australia, 10–15 June 2012; pp. 1–7. [Google Scholar]
- Cervone, G.; Franzese, P. Non-Darwinian evolution for the source detection of atmospheric releases. Atmos. Environ. 2011, 45, 4497–4506. [Google Scholar] [CrossRef]
- Bu, Q.; Wang, Z.; Tong, X. An improved genetic algorithms for searching for pollution sources. Water Sci. Eng. 2013, 6, 392–401. [Google Scholar]
- Cantelli, A.; D’orta, F.; Cattini, A.; Sebastianelli, F.; Cedola, L. Application of genetic algorithm for the simultaneous. identification of atmospheric pollution sources. Atmos. Environ. 2015, 115, 36–46. [Google Scholar] [CrossRef]
- Sharan, M.; Yadav, A.K.; Singh, M.P.; Agarwal, P.; Nigam, S. A Mathematical Model for the Dispersion of Air Pollutants in Low Wind Conditions. Atmos. Environ. 1996, 30, 1209–1220. [Google Scholar] [CrossRef]
- Chaiwino, W.; Mouktonglang, T. Identication of Atmospheric Pollution Source Based on Particle Swarm Optimization. Thai J. Math. 2019, 17, 125–140. [Google Scholar]
- Deb, K. An introduction to Genetic Algorithms. Sadhana 1999, 24, 293–315. [Google Scholar] [CrossRef] [Green Version]
- Sivanandam, S.N.; Deepa, S.N. Introduction to Genetic Algorithms; Springer Science & Business Media: Berlin/Heidelberg, Germany, 2008. [Google Scholar]
- Houck, C.R.; Joines, J.; Kay, M.G. A Genetic Algorithm for Function Optimization: A Matlab Implementation. Ncsu-ie tr 1995, 95, 1–10. [Google Scholar]
- Razvan, C. Comparison between the Performance of GA and PSO in Structural Optimization Problems. Am. J. Eng. Res. (AJER) 2016, 5, 268–272. [Google Scholar]
- Shahid, S.; Ruchi, S. A Comparative Study of Genetic Algorithm and the Particle Swarm Optimization. Int. J. Electr. Eng. 2016, 9, 215–223. [Google Scholar]
- Das, P.K.; Behera, H.S.; Panigrahib, B.K. A hybridization of an Improved Particle Swarm Optimization and Gravitational Search Algorithm for Multi-robot Path Planning. Swarm Evol. Comput. 2016, 28, 14–28. [Google Scholar] [CrossRef]
- Fernandes, C.; Pontes, A.J.; Viana, J.C.; Gaspar-Cunha, A. Using multiobjective evolutionary algorithms in the optimization of operating conditions of polymer injection molding. Polym. Eng. Sci. 2010, 50, 1667–1678. [Google Scholar] [CrossRef]
- Fernandes, C.; Pontes, A.J.; Viana, J.C.; Gaspar-Cunha, A. Using Multi-objective Evolutionary Algorithms for Optimization of the Cooling System in Polymer Injection Molding. Int. Polym. Process. 2012, 27, 213–223. [Google Scholar] [CrossRef] [Green Version]
- Fereshteh, S.; Nima, J. Service Allocation in the Cloud Environments Using Multi-objective Particle Swarm Optimization Algorithm Based on Crowding Distance. Swarm Evol. Comput. 2017, 35, 53–64. [Google Scholar]
- Shahid, S.; Ruchi, S. Multi-Objective Optimization of Gate Location and Processing Conditions in Injection Molding Using MOEAs: Experimental Assessment. In Proceedings of the International Conference on Evolutionary Multi-Criterion Optimization (EMO 2015), Guimarães, Portugal, 29 March–1 April 2015; pp. 373–387. [Google Scholar]
- Cui, J.; Lang, J.; Chen, T.; Cheng, S.; Shen, Z.; Mao, S. Investigating the Impacts of Atmospheric Diffusion Conditions on Source Parameter Identification based on an Optimized Inverse Modelling Method. Atmos. Environ. 2019, 205, 19–29. [Google Scholar] [CrossRef]
- Li, H.; Zhang, J.; Yi, J. Computational Source Term Estimation of the Gaussian Puff Dispersion. Soft Comput. 2019, 23, 59–75. [Google Scholar] [CrossRef]
- Albani, R.A.S.; Albani, V.V.L.; Silva, N.A.J. Source Characterization of Airborne Pollutant Emissions by Hybrid Metaheuristic/ Gradient-based Optimization Techniques. Environ. Pollut. 2020, 267, 115618. [Google Scholar] [CrossRef]
- Stockie, J.M. The Mathematics of Atmospheric Dispersion Modeling. SIAM Rev. 2011, 53, 349–375. [Google Scholar] [CrossRef]
- Sharan, M.; Singh, S.K.; Issartel, J.P. Least square data assimilation for identification of the point source emissions. Pure Appl. Geophys. 2012, 169, 483–497. [Google Scholar] [CrossRef]
- Kennedy, J.; Eberhart, R. Particle Swarm Optimization. In Proceedings of the ICNN’95—International Conference on Neural Networks, Perth, Australia, 27 November–1 December 1995. [Google Scholar]
- Bai, Q. Analysis of Particle Swarm Optimization Algorithm. Comput. Inf. Sci. 2010, 3, 180–184. [Google Scholar] [CrossRef] [Green Version]
- Shi, Y.; Eberhart, R. A Modified Particle Swarm Optimizer. In Proceedings of the 1998 IEEE International Conference on Evolutionary Computation Proceedings, IEEE World Congress on Computational Intelligence (Cat. No.98TH8360), Anchorage, AK, USA, 4–9 May 1998; pp. 69–73. [Google Scholar]
- Clerc, M. The Swarm and the Queen: Towards a Deterministic and Adaptive Particle Swarm Optimization. In Proceedings of the 1999 Congress on Evolutionary Computation-CEC99 (Cat. No. 99TH8406), Washington, DC, USA, 6–9 July 1999; Volume 3, pp. 1951–1957. [Google Scholar]
- Eberhart, R.; Shi, Y. Comparing Inertia Weights and Constriction Factors in Particle Swarm Optimization. In Proceedings of the 2000 Congress on Evolutionary Computation, CEC00 (Cat. No.00TH8512), La Jolla, CA, USA, 16–19 July 2000; Volume 1, pp. 84–88. [Google Scholar]
- Alanis-Tamez, M.D.; López-Martín, C.; Villuendas-Rey, Y. Particle Swarm Optimization for Predicting the Development Effort of Software Projects. Mathematics 2020, 8, 1819. [Google Scholar] [CrossRef]
- Zhang, M.; Long, D.; Qin, T.; Yang, J. A Chaotic Hybrid Butterfly Optimization Algorithm with Particle Swarm Optimization for High-Dimensional Optimization Problems. Symmetry 2020, 12, 1800. [Google Scholar] [CrossRef]
- Liang, X.; Li, X.; Ercan, M. A PSO—Line Search Hybrid Algorithm. In Proceedings of the Conference: Computational Science and Its Applications—ICCSA 2009, International Conference, Seoul, Korea, 29 June–2 July 2009; pp. 547–556. [Google Scholar]
- Liu, Y.; Qin, Z.; Shi, Z. Hybrid Particle Swarm Optimizer with Line Search. In Proceedings of the 2004 IEEE International Conference on Systems, Man and Cybernetics (IEEE Cat. No.04CH37583), The Hague, The Netherlands, 10–13 October 2004; Volume 4, pp. 3751–3755. [Google Scholar]




















{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| The Experiment in 2D | ||||
| Problem case | c | c | ||
| (PSO) | (PSO) | (HPSO) | (HPSO) | |
| Specifying single-source locations | 0.7 | 0.5 | 0.4 | 0.7 |
| Specifying two-source locations | 0.8 | 0.5 | 0.6 | 0.3 |
| Specifying single-source locations and its corresponding emission rate | 0.8 | 0.6 | 0.8 | 0.4 |
| The Experiment in 3D | ||||
| Specifying single-source locations | 0.7 | 0.3 | 0.5 | 0.7 |
| Specifying single-source locations and its corresponding emission rate | 0.7 | 0.5 | 0.6 | 0.2 |
| The Number of Particles | HPSO | PSO | ||
|---|---|---|---|---|
| Average Distance | Computational | Average Distance | Computational | |
| Error (m) | Time (s) | Error (m) | Time (s) | |
| 10 | 3218.63 | 0.71610 | 7689.64 | 0.268653 |
| 20 | 2628.88 | 0.86134 | 2631.55 | 0.479630 |
| 30 | 1175.62 | 1.69867 | 1942.41 | 0.716689 |
| 40 | 699.23 | 2.06156 | 682.51 | 0.907543 |
| 50 | 238.14 | 2.47007 | 517.01 | 1.136285 |
| 60 | 50.04 | 2.87347 | 764.96 | 1.342402 |
| 70 | 3.74 | 3.27136 | 461.86 | 1.562531 |
| 80 | 1.41 | 3.66756 | 407.51 | 1.767342 |
| 90 | 0.37 | 4.08449 | 351.72 | 2.004292 |
| 100 | 0.17 | 4.45915 | 170.14 | 2.189354 |
| 110 | 0.04 | 4.86884 | 120.02 | 2.394523 |
| 120 | 0.0042 | 5.28437 | 90.31 | 2.642548 |
| 130 | 5.71370 | 76.18 | 2.856800 | |
| 140 | 6.09393 | 70.85 | 3.057815 | |
| 150 | 6.51467 | 40.93 | 3.264904 | |
| 160 | 6.60431 | 40.01 | 3.510096 | |
| 170 | 6.95562 | 20.18 | 3.730219 | |
| 180 | 7.36398 | 21.12 | 3.900210 | |
| 190 | 7.69186 | 10.22 | 4.140191 | |
| 200 | 8.13077 | 10.36 | 4.390146 | |
| 210 | 8.69686 | 11.47 | 4.579430 | |
| 220 | 8.91746 | 15.31 | 4.776681 | |
| 230 | 9.17680 | 12.47 | 4.964160 | |
| 240 | 9.47666 | 20.21 | 5.152613 | |
| 250 | 9.70849 | 8.98 | 5.570200 | |
| The Number of Iterations | HPSO | PSO | ||
|---|---|---|---|---|
| Average Distance | Computational | Average Distance | Computational | |
| Error (m) | Time (s) | Error (m) | Time (s) | |
| 10 | 4195.36 | 0.437180 | 14,840.15 | 0.2475500 |
| 20 | 1640.33 | 0.854225 | 12,164.85 | 0.4676400 |
| 30 | 236.27 | 1.284434 | 11,535.78 | 0.6864380 |
| 40 | 34.92 | 1.643332 | 5759.85 | 0.9030310 |
| 50 | 11.34 | 2.027071 | 3168.66 | 1.1229110 |
| 60 | 11.18 | 2.422206 | 1125.05 | 1.3300200 |
| 70 | 3.37 | 2.851604 | 913.43 | 1.5588340 |
| 80 | 0.94 | 3.259195 | 673.01 | 1.7654640 |
| 90 | 0.35 | 3.625978 | 418.90 | 1.9691390 |
| 100 | 0.20 | 4.022224 | 125.63 | 2.2105750 |
| 110 | 0.0059 | 4.462938 | 110.10 | 2.4005550 |
| 120 | 4.866495 | 109.20 | 2.6671640 | |
| 130 | 5.320598 | 90.04 | 2.8114300 | |
| 140 | 5.640714 | 75.00 | 3.0862320 | |
| 150 | 6.042532 | 65.51 | 3.2879560 | |
| 160 | 6.435387 | 30.60 | 3.5156750 | |
| 170 | 6.872544 | 30.10 | 3.7261230 | |
| 180 | 7.270416 | 20.46 | 3.9712130 | |
| 190 | 7.745574 | 20.39 | 4.1502190 | |
| 200 | 8.177410 | 11.66 | 4.3569590 | |
| 210 | 8.480385 | 17.41 | 4.5510942 | |
| 220 | 8.929684 | 14.55 | 4.8100910 | |
| 230 | 9.183009 | 21.95 | 5.0166410 | |
| 240 | 9.468920 | 4.12 | 5.2980970 | |
| 250 | 9.711908 | 31.09 | 5.4158020 | |
| The Number of Sensors | Average Distance Error (m) | |
|---|---|---|
| PSO | HPSO | |
| 2 | 5912.48 | 1109.41 |
| 4 | 15.42 | |
| 6 | 12.41 | |
| 8 | 15.89 | |
| 10 | 10.24 | |
| Time Steps | The Best Predicted Location | Average Error |
|---|---|---|
| 20 | (0.548, 1.785) | 0.0787 |
| 40 | (0.499, 0.899) | 0.0154 |
| 60 | (0.500, 1.015) | 0.0109 |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2021 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Chaiwino, W.; Manorot, P.; Poochinapan, K.; Mouktonglang, T. Identifying the Locations of Atmospheric Pollution Point Source by Using a Hybrid Particle Swarm Optimization. Symmetry 2021, 13, 985. https://doi.org/10.3390/sym13060985
Chaiwino W, Manorot P, Poochinapan K, Mouktonglang T. Identifying the Locations of Atmospheric Pollution Point Source by Using a Hybrid Particle Swarm Optimization. Symmetry. 2021; 13(6):985. https://doi.org/10.3390/sym13060985
Chicago/Turabian StyleChaiwino, Wipawinee, Panasun Manorot, Kanyuta Poochinapan, and Thanasak Mouktonglang. 2021. "Identifying the Locations of Atmospheric Pollution Point Source by Using a Hybrid Particle Swarm Optimization" Symmetry 13, no. 6: 985. https://doi.org/10.3390/sym13060985
APA StyleChaiwino, W., Manorot, P., Poochinapan, K., & Mouktonglang, T. (2021). Identifying the Locations of Atmospheric Pollution Point Source by Using a Hybrid Particle Swarm Optimization. Symmetry, 13(6), 985. https://doi.org/10.3390/sym13060985