
Applying the Dijkstra Algorithm to Solve a Linear Diophantine Fuzzy Environment




Abstract
:1. Introduction
- 1.
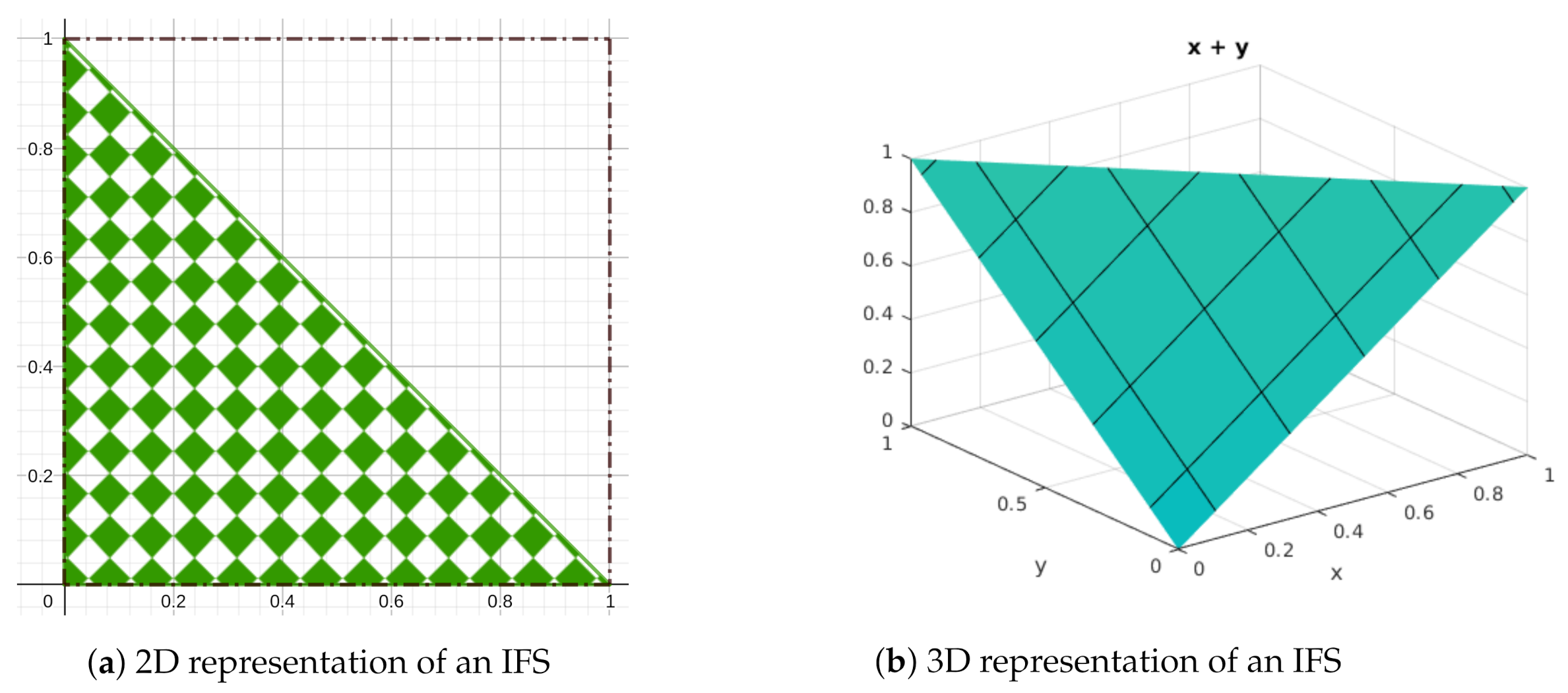
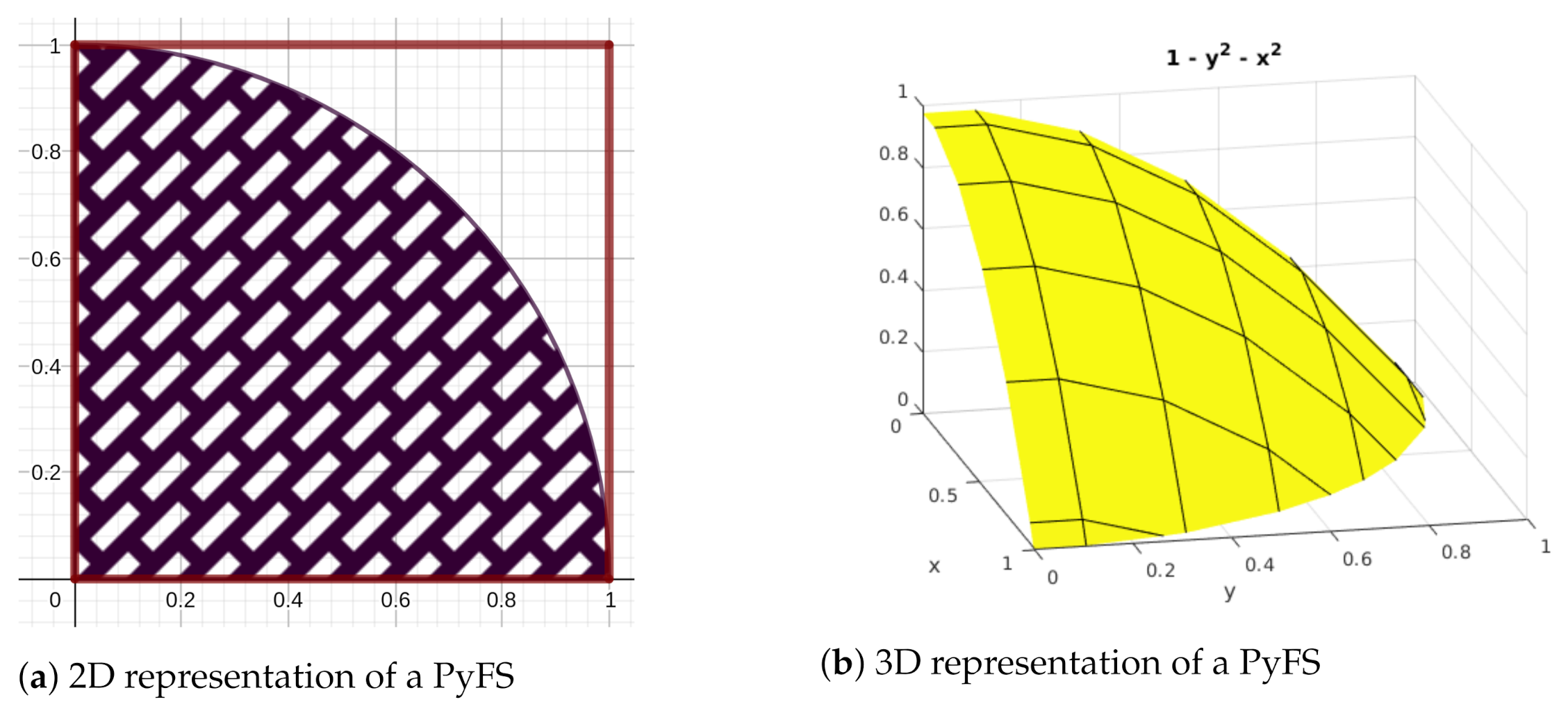
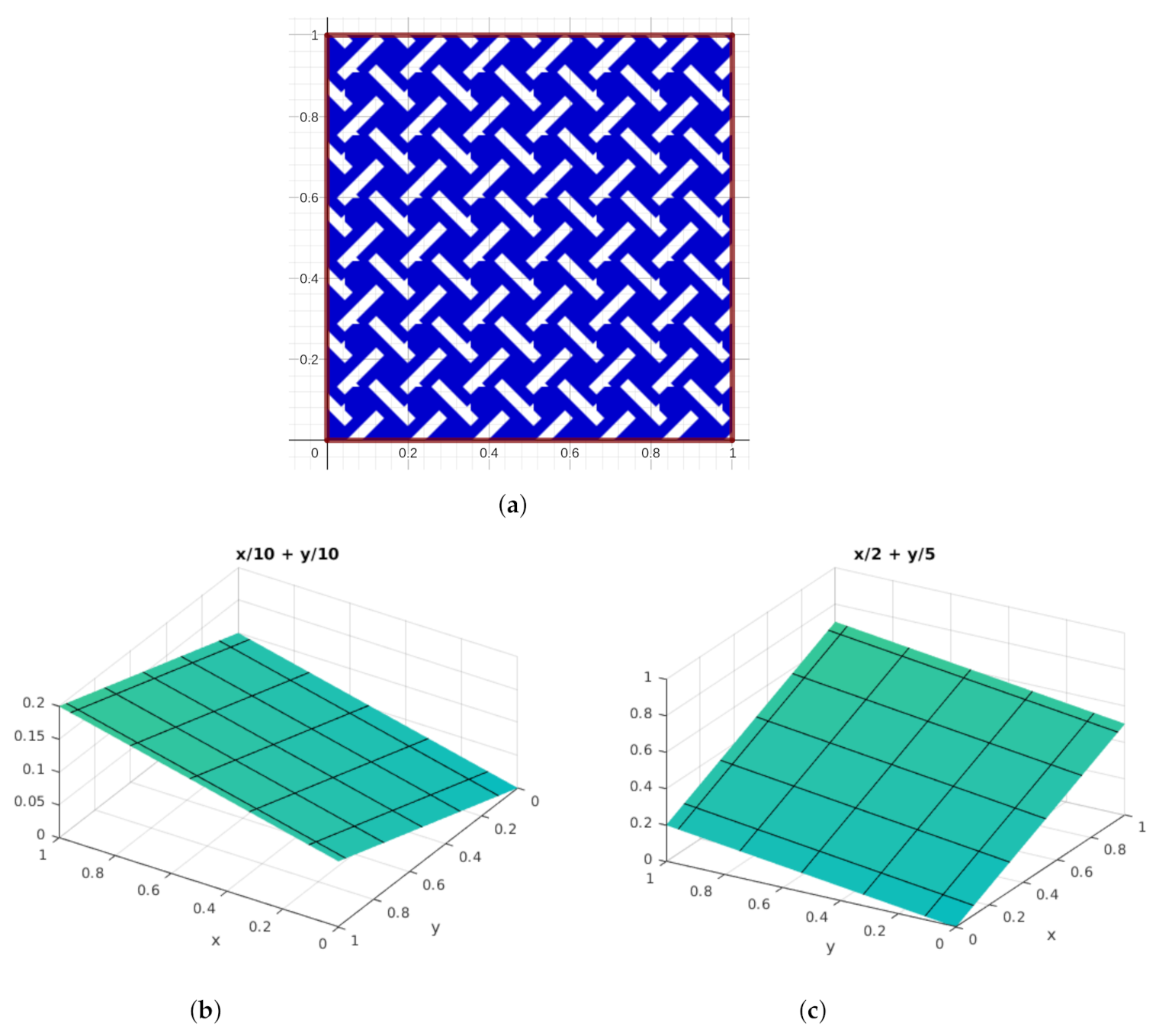
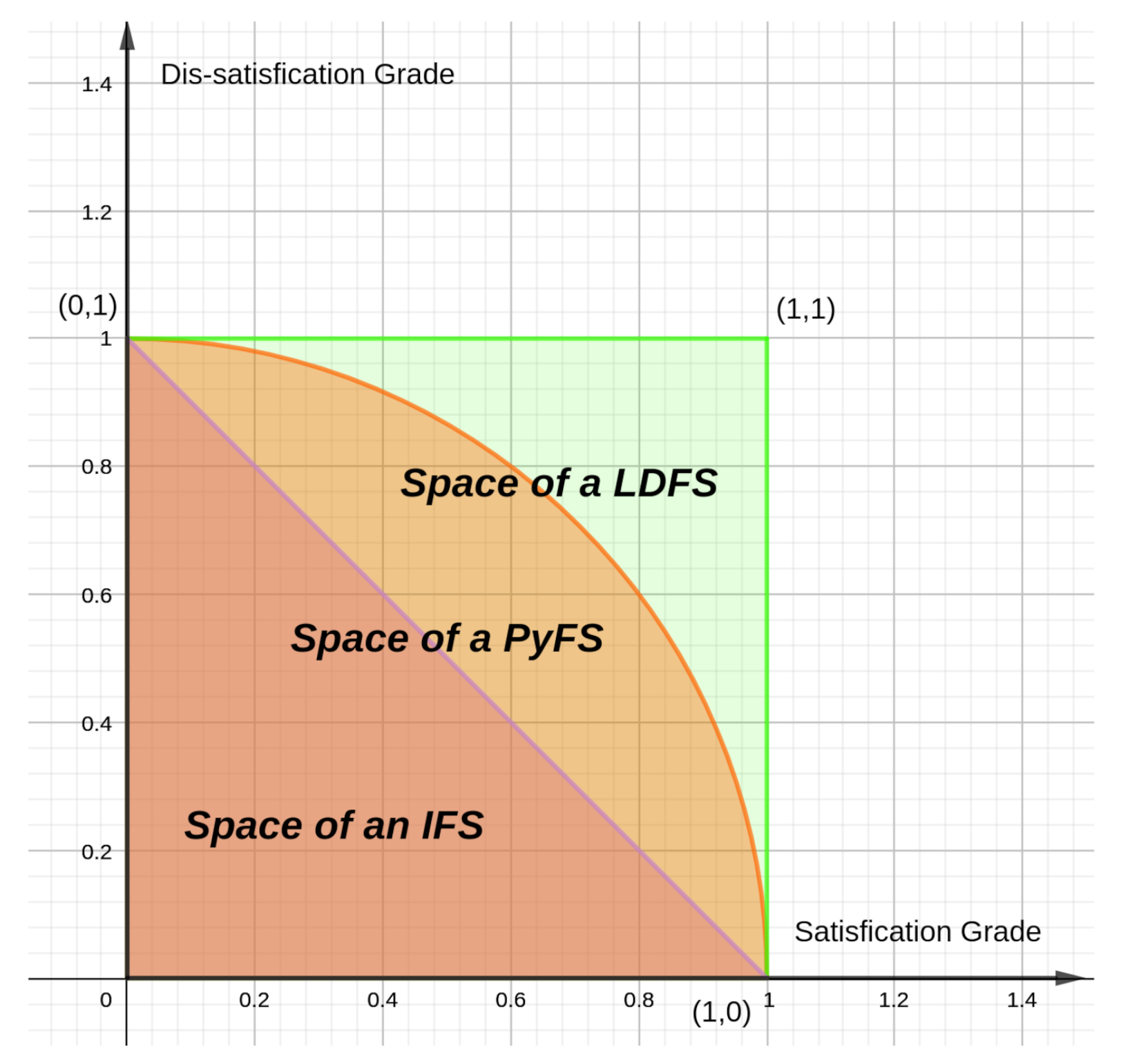
- Linear Diophantine fuzzy set (LDFS) theory is superior to intuitionistic fuzzy set (IFS), Pythagorean fuzzy set (PyFS), and q-rung orthopair fuzzy set (q-ROFS) theories, with a wide space of vague and uncertain information via reference parameters owing to its magnificent feature of a broad depiction area for permissible doublets;
- 2.
- In decision analysis, the membership and nonmembership grades are not enough to analyze objects in the universe. The addition of reference parameters provides freedom to the decision-makers in selecting the membership and nonmembership grades. The LDFS with the associated reference parameters provides a robust approach for modeling uncertainties;
- 3.
- We codify the shortest path (SP) problem for linear Diophantine fuzzy graphs;
- 4.
- Linear Diophantine fuzzy numbers are used to represent the weights associated with arcs (LDFNs);
- 5.
- The main goal of the presented work is to create a solution technique for directed network graphs by introducing linear Diophantine fuzzy (LDF) optimality constraints;
- 6.
- The weights of distinct routes are then calculated using an improved score function (SF) with the arc values represented by LDFNs;
- 7.
- The conventional Dijkstra method is further modified to find the arc weights of linear Diophantine fuzzy shortest path (LDFSP) and coterminal LDFSP based on these enhanced score functions and 11 optimality requirements;
- 8.
- A comparative analysis is carried out with the current approaches demonstrating the benefits of the new algorithm. Finally, to validate the possible use of the proposed technique, a small-sized telecommunication network is presented;
- 9.
- The suggested approach’s efficiency, rationality, and superiority are examined using a numerical example to describe the communications network; the symmetry of the optimal decision and the ranking of possible alternatives are then compared.
- 10.
- The suggested approach’s efficiency, rationality, and superiority are examined using a numerical example to describe the communications network;
- 11.
- A comparative analysis follows the symmetry of the best decision and the ranking of viable alternatives.
2. Preliminaries
- (i)
- An absolute LDFS, if it is of the form ;
- (ii)
- A null or empty LDFS, if it is of the form .
- 1.
- 2.
- (i)
- ;
- (ii)
- ;
- (iii)
- ;
- (iv)
- ;
- (v)
- ;
- (vi)
- ;
- (vii)
- ;
- (viii)
- ;
- (ix)
- .
- (i)
- ;
- (ii)
- by the Definition 6 (iii);
- (iii)
- ;
- (iv)
- ;
- (v)
- ;
- (vi)
- .If , then we have the following:
- (vii)
- ;
- (viii)
- .
- (i)
- if ;
- (ii)
- if ;
- (iii)
- If , then:
- (a)
- if ;
- (b)
- if ;
- (c)
- if .
3. Dijkstra Algorithm for Finding the Shortest Path in a Network
- 1.
- To the linear Diophantine fuzzy arc prices, two edges are added;
- 2.
- Score functions are used to compare distance values between two distinct paths with edge lengths depicted by LDFNs.
3.1. The Dijkstra Algorithm: Our Extension via the LDFG
| Algorithm 1: Pseudo-code for the proposed linear Diophantine fuzzy Dijkstra’s algorithm (LDFDA). |
| 1. function linear Diophantine fuzzy Dijkstra’s 2. for each node //initialization 3. status label //an attribute specifying the distance value of node 4. previous not defined; //former node in optimized path from the start node 5. end for 6. status label // distance of the start node to itself 7. set of all possible nodes with temporary labels in 8. while is nonvoid // the main loop 9. node in with the minimum distance value 10. if status label 11. stop; // all the other nodes are impenetrable form the start node 12. end if 13. delete from 14. for every such that there exists link 15. //defuzzification of the linear Diophantine fuzzy number 16. if , then // comparison of the distance values values to obtain the smallest distance value 17. 18. previous 19. end if 20. status label //updated distance label 21. end for 22. end while 23. return status label []; 24. end function |
3.2. The Proposed Dijkstra Algorithm: A View
- First of all, our approach modifies the principle of the predicted values for LDFNs. For the predicted values of LDFNs, we obtain novel results;
- We use this method of implementation to solve a well-known shortest path algorithm, the so-called Dijkstra algorithm, under which the method of the defuzzification of LDFNs allocated to network arcs is performed by computing their predicted values;
- To calculate the SD value, a juxtaposition of the LDFNs is accomplished in terms of the score function, gleaned from the predicted LDFN values, leading directly to a crisp number.
4. Numerical Application
4.1. Case Study
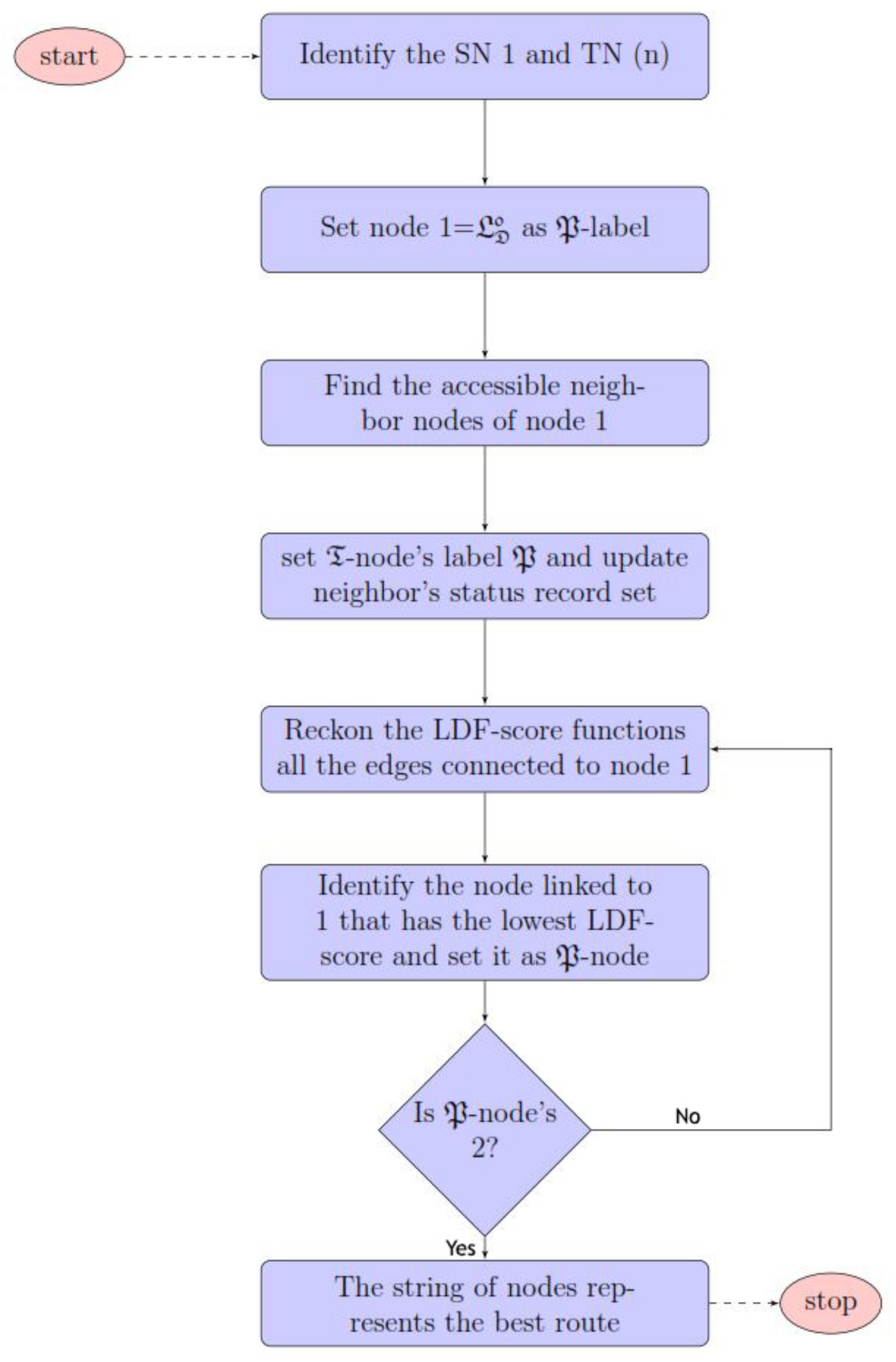
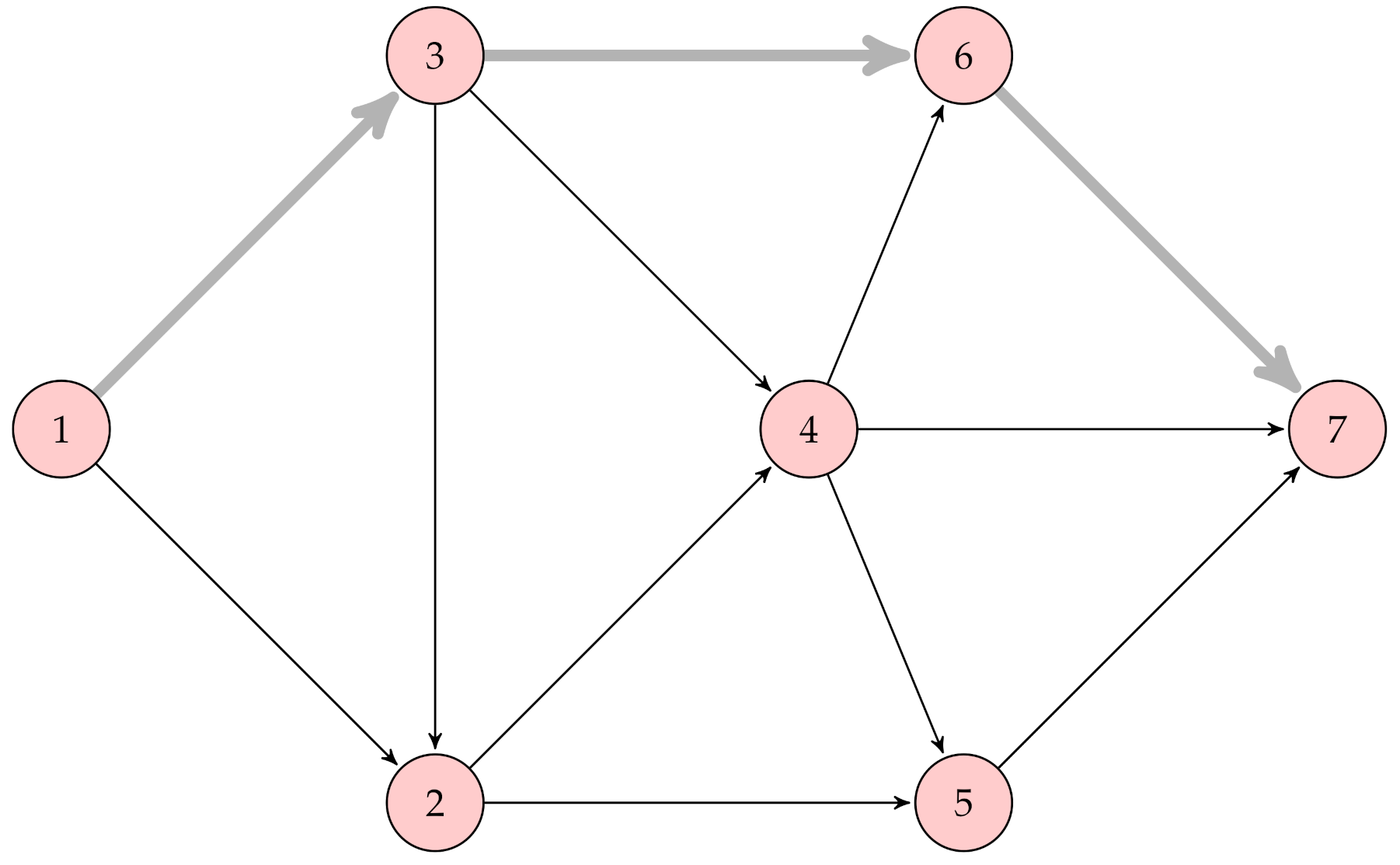
- Iteration 0: Assign Node (1) = the permanent label = ;
- Iteration 1: We calculated the distance from the start (last permanently marked) Node (1) to its accessible neighbor Nodes (2) and (3). Consequently, the lexicon (temporary and permanent) of tagged nodes is:
Nodes Label Status 1 2 3 In order to compare , and, we used Definition 5 (1).Since the score value of is less than the score value of, the status of Node (3) is changed to permanent; - Iteration 2: Nodes (2), (4), and (6) can be accessed from the (last permanently marked) Node (3). Thus, the list (temporary and permanent) of labeled nodes becomes:
Nodes Label Status 1 2 (or) 3 4 (or) 6 (or) .Since the score value of is less than the remaining nodes,the status of Node (2) is changed to permanent; - Iteration 3: Nodes (4) and (5) can be accessed from the (last permanently marked) Node (2). Thus, the list (temporary and permanent) of labeled nodes becomes:
Nodes Label Status 1 2 3 4 (or) 5 (or) 6 (or) .Since the score value of is less than the remainingnodes, the status of Node (6) is changed to permanent; - Iteration 4: Node (7) can be accessed from the (last permanently marked) Node (6). Thus, the list (temporary and permanent) of labeled nodes becomes:
Nodes Label Status 1 2 3 4 (or) 5 (or) 6 7 (or)
(or),,.Since the score value of is less than theremaining nodes, the position of the seventh node is converted to permanent.As the point TN 7 has the permanent label, we can stop the operations at this point, and to change the remaining points as the permanent label, we have.Here, the score of is less than the score.Here, the score of is less than the score:Nodes Label Status 1 2 3 4 5 6 7
4.2. Summary
5. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Conflicts of Interest
Abbreviations
| FS | fuzzy set |
| IFS | intuitionistic fuzzy set |
| PyFS | Pythagorean fuzzy set |
| LDFS | linear Diophantine fuzzy set |
| CN | crisp number |
| DA | Dijkstra’s algorithm |
| FN | fuzzy number |
| IFN | intuitionistic fuzzy number |
| PyFN | Pythagorean fuzzy number |
| LDFN | linear Diophantine fuzzy number |
| SN | start node |
| TN | terminal node |
| SP | shortest path |
| SF | score function |
| SPP | shortest path problem |
| 2D plot | two-dimensional plot |
| 3D plot | three-dimensional plot |
| SD | shortest distance |
| LDFSP | linear Diophantine fuzzy shortest path |
| MCDM | multicriteria decision-making |
References
- Zadeh, L.A. Fuzzy sets. Inf. Control 1965, 8, 338–353. [Google Scholar] [CrossRef] [Green Version]
- Okada, S.; Soper, T. A shortest path problem on a network with fuzzy arc lengths. Fuzzy Sets Syst. 2000, 109, 129–140. [Google Scholar] [CrossRef]
- Keshavarz, E.; Khorram, E. A fuzzy shortest path with the highest reliability. J. Comput. Appl. Math. 2009, 230, 204–212. [Google Scholar]
- Dou, Y.; Zhu, L.; Wang, H.S. Solving the fuzzy shortest path problem using multi-criteria decision method based on vague similarity measure. Appl. Soft Comput. 2012, 12, 1621–1631. [Google Scholar] [CrossRef]
- Deng, Y.; Chen, Y.; Zhang, Y.; Mahadevan, S. Fuzzy Dijkstra algorithm for shortest path problem under uncertain environment. Appl. Soft Comput. 2012, 12, 1231–1237. [Google Scholar] [CrossRef]
- Ebrahimnejad, A.; Karimnejad, Z.; Alrezaamiri, H. Particle swarm optimisation algorithm for solving shortest path problems with mixed fuzzy arc weights. Int. J. Appl. Decis. Sci. 2015, 8, 203–222. [Google Scholar] [CrossRef]
- Ebrahimnejad, A.; Tavana, M.; Alrezaamiri, H. A novel artificial bee colony algorithm for shortest path problems with fuzzy arc weights. Measurement 2016, 93, 48–56. [Google Scholar]
- Atanassov, K.T. Intuitionistic fuzzy sets. In Intuitionistic Fuzzy Sets; Physica: Heidelberg, Germany, 1999; pp. 1–137. [Google Scholar]
- Mukherjee, S. Dijkstra’s algorithm for solving the shortest path problem on networks under intuitionistic fuzzy environment. J. Math. Model. Algorithms 2012, 11, 345–359. [Google Scholar] [CrossRef]
- Geetharamani, G.; Jayagowri, P. Using similarity degree approach for shortest path in intuitionistic fuzzy network. In Proceedings of the 2012 International Conference on Computing, Communication and Applications, Dindigul, India, 22–24 February 2012; pp. 1–6. [Google Scholar]
- Biswas, S.S.; Alam, B.; Doja, M.N. An algorithm for extracting intuitionistic fuzzy shortest path in a graph. Appl. Comput. Intell. Soft Comput. 2013, 2013, 970197. [Google Scholar] [CrossRef] [Green Version]
- Kumar, G.; Bajaj, R.K.; Gandotra, N. Algorithm for shortest path problem in a network with interval-valued intuitionistic trapezoidal fuzzy number. Procedia Comput. Sci. 2015, 70, 123–129. [Google Scholar] [CrossRef] [Green Version]
- Sujatha, L.; Hyacinta, J.D. The shortest path problem on networks with intuitionistic fuzzy edge weights. Glob. J. Pure Appl. Math. 2017, 13, 3285–3300. [Google Scholar]
- Motameni, H.; Ebrahimnejad, A. Constraint shortest path problem in a network with intuitionistic fuzzy arc weights. In Proceedings of the International Conference on Information Processing and Management of Uncertainty in Knowledge-Based Systems, Cadiz, Spain, 11–15 June 2018; Springer: Cham, Switzerland, 2018; pp. 310–318. [Google Scholar]
- Yager, R.R. Pythagorean fuzzy subsets. In Proceedings of the 2013 Joint IFSA World Congress and NAFIPS Annual Meeting (IFSA/NAFIPS), Edmonton, AB, Canada, 24–28 June 2013; pp. 57–61. [Google Scholar]
- Yager, R.R.; Abbasov, A.M. Pythagorean membership grades, complex numbers, and decision-making. Int. J. Intell. Syst. 2013, 28, 436–452. [Google Scholar] [CrossRef]
- Yager, R.R. Pythagorean membership grades in multicriteria decision-making. IEEE Trans. Fuzzy Syst. 2013, 22, 958–965. [Google Scholar] [CrossRef]
- Zhang, X.; Xu, Z. Extension of TOPSIS to multiple criteria decision-making with Pythagorean fuzzy sets. Int. J. Intell. Syst. 2014, 29, 1061–1078. [Google Scholar] [CrossRef]
- Akram, M.; Habib, A.; Ilyas, F.; Mohsan Dar, J. Specific types of Pythagorean fuzzy graphs and application to decision-making. Math. Comput. Appl. 2018, 23, 42. [Google Scholar] [CrossRef] [Green Version]
- Akram, M.; Dar, J.M.; Naz, S. Certain graphs under Pythagorean fuzzy environment. Complex Intell. Syst. 2019, 5, 127–144. [Google Scholar] [CrossRef]
- Karthikeyan, P.; Mani, P. Applying Dijkstra Algorithm for Solving Spherical fuzzy Shortest Path Problem. Solid State Technol. 2020, 63, 4239–4250. [Google Scholar]
- Mani, P.; Vasudevan, B.; Sivaraman, M. Shortest path algorithm of a network via picture fuzzy digraphs and its application. Mater. Today Proc. 2021, 45, 3014–3018. [Google Scholar] [CrossRef]
- Parimala, M.; Broumi, S.; Prakash, K.; Topal, S. Bellman-Ford algorithm for solving shortest path problem of a network under picture fuzzy environment. Complex Intell. Syst. 2021. [Google Scholar] [CrossRef]
- Broumi, S.; Talea, M.; Bakali, A.; Smarandache, F.; Nagarajan, D.; Lathamaheswari, M.; Parimala, M. Shortest path problem in fuzzy, intuitionistic fuzzy and neutrosophic environment: An overview. Complex Intell. Syst. 2019, 5, 371–378. [Google Scholar] [CrossRef] [Green Version]
- Starczewski, J.T.; Goetzen, P.; Napoli, C. Triangular fuzzy-rough set based fuzzification of fuzzy rule-based systems. J. Artif. Intell. Soft Comput. Res. 2020, 10, 271–285. [Google Scholar] [CrossRef]
- Napoli, C.; Pappalardo, G.; Tramontana, E. A mathematical model for file fragment diffusion and a neural predictor to manage priority queues over BitTorrent. Int. J. Appl. Math. Comput. Sci. 2016, 26, 147–160. [Google Scholar] [CrossRef] [Green Version]
- Wróbel, M.; Starczewski, J.T.; Napoli, C. Grouping Handwritten Letter Strokes Using a Fuzzy Decision Tree. In Proceedings of the International Conference on Artificial Intelligence and Soft Computing, Zakopane, Poland, 12–14 October 2020; pp. 103–113. [Google Scholar]
- Fornaia, A.; Napoli, C.; Tramontana, E. Cloud services for on-demand vehicles management. Inf. Technol. Control 2017, 46, 484–498. [Google Scholar] [CrossRef] [Green Version]
- Riaz, M.; Hashmi, M.R. Linear Diophantine fuzzy set and its applications towards multi-attribute decision-making problems. J. Intell. Fuzzy Syst. 2019, 37, 5417–5439. [Google Scholar] [CrossRef]
- Riaz, M.; Hashmi, M.R.; Kalsoom, H.; Pamucar, D.; Chu, Y.M. Linear Diophantine Fuzzy Soft Rough Sets for the Selection of Sustainable Material Handling Equipment. Symmetry 2020, 12, 1215. [Google Scholar] [CrossRef]
- Ayub, S.; Shabir, M.; Riaz, M.; Aslam, M.; Chinram, R. Linear Diophantine Fuzzy Relations and Their Algebraic Properties with Decision Making. Symmetry 2021, 13, 945. [Google Scholar] [CrossRef]
- Almagrabi, A.O.; Abdullah, S.; Shams, M.; Al-Otaibi, Y.D.; Ashraf, S. A new approach to q-linear Diophantine fuzzy emergency decision support system for COVID19. J. Ambient. Intell. Humaniz. Comput. 2021. [Google Scholar] [CrossRef]
- Kamacı, H. Linear Diophantine fuzzy algebraic structures. J. Ambient. Intell. Humaniz. Comput. 2021. [Google Scholar] [CrossRef]
- Iampan, A.; García, G.S.; Riaz, M.; Athar Farid, H.M.; Chinram, R. Linear Diophantine Fuzzy Einstein Aggregation Operators for Multi-Criteria Decision-Making Problems. J. Math. 2021, 2021, 5548033. [Google Scholar] [CrossRef]
- Riaz, M.; Farid, H.M.A.; Aslam, M.; Pamucar, D.; Bozanic, D. Novel Approach for Third-Party Reverse Logistic Provider Selection Process under Linear Diophantine Fuzzy Prioritized Aggregation Operators. Symmetry 2021, 13, 1152. [Google Scholar] [CrossRef]
- Chuang, T.N.; Kung, J.Y. A new algorithm for the discrete fuzzy shortest path problem in a network. Appl. Math. Comput. 2006, 174, 660–668. [Google Scholar] [CrossRef]
- Gani, A.N.; Jabarulla, M.M. On searching intuitionistic fuzzy shortest path in a network. Appl. Math. Sci. 2010, 4, 3447–3454. [Google Scholar]
- Hernandes, F.; Lamata, M.T.; Verdegay, J.L.; Yamakami, A. The shortest path problem on networks with fuzzy parameters. Fuzzy Sets Syst. 2007, 158, 1561–1570. [Google Scholar] [CrossRef]
- Warshall, S. A theorem on boolean matrices. J. ACM 1962, 9, 11–12. [Google Scholar] [CrossRef]
- Dijkstra, E.W. A note on two problems in connexion with graphs. Numer. Math. 1959, 1, 269–271. [Google Scholar] [CrossRef] [Green Version]
- Bellman, R. On a routing problem. Q. Appl. Math. 1958, 16, 87–90. [Google Scholar] [CrossRef] [Green Version]
- Floyd, R.W. Algorithm 97: Shortest path. Commun. ACM 1962, 5, 345. [Google Scholar] [CrossRef]
- Makariye, N. Towards shortest path computation using Dijkstra algorithm. In Proceedings of the 2017 International Conference on IoT and Application (ICIOT), Nagapattinam, India, 19–20 May 2017; pp. 1–3. [Google Scholar]
- Enayattabar, M.; Ebrahimnejad, A.; Motameni, H. Dijkstra algorithm for shortest path problem under interval-valued Pythagorean fuzzy environment. Complex Intell. Syst. 2019, 5, 93–100. [Google Scholar] [CrossRef] [Green Version]









{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Vertices | ||||||
|---|---|---|---|---|---|---|
| {all temporary labeled nodes} | |
| {all permanent labeled nodes} | |
| the SD from the start node to a node | |
| a variant | |
| renovated distance from the start node | |
| cost value between nodes and | |
| alternate variant |
| SPP under Models | Links or Edges | Satisfaction Grade | Dissatisfaction Grade | Parameterization |
|---|---|---|---|---|
| Crisp set | CN | - | - | - |
| FS | FN | ✓ | - | - |
| IFS | IFN | ✓ | ✓ | - |
| PyFS | PyFN | ✓ | ✓ | - |
| LDFS | LDFN | ✓ | ✓ | ✓ |
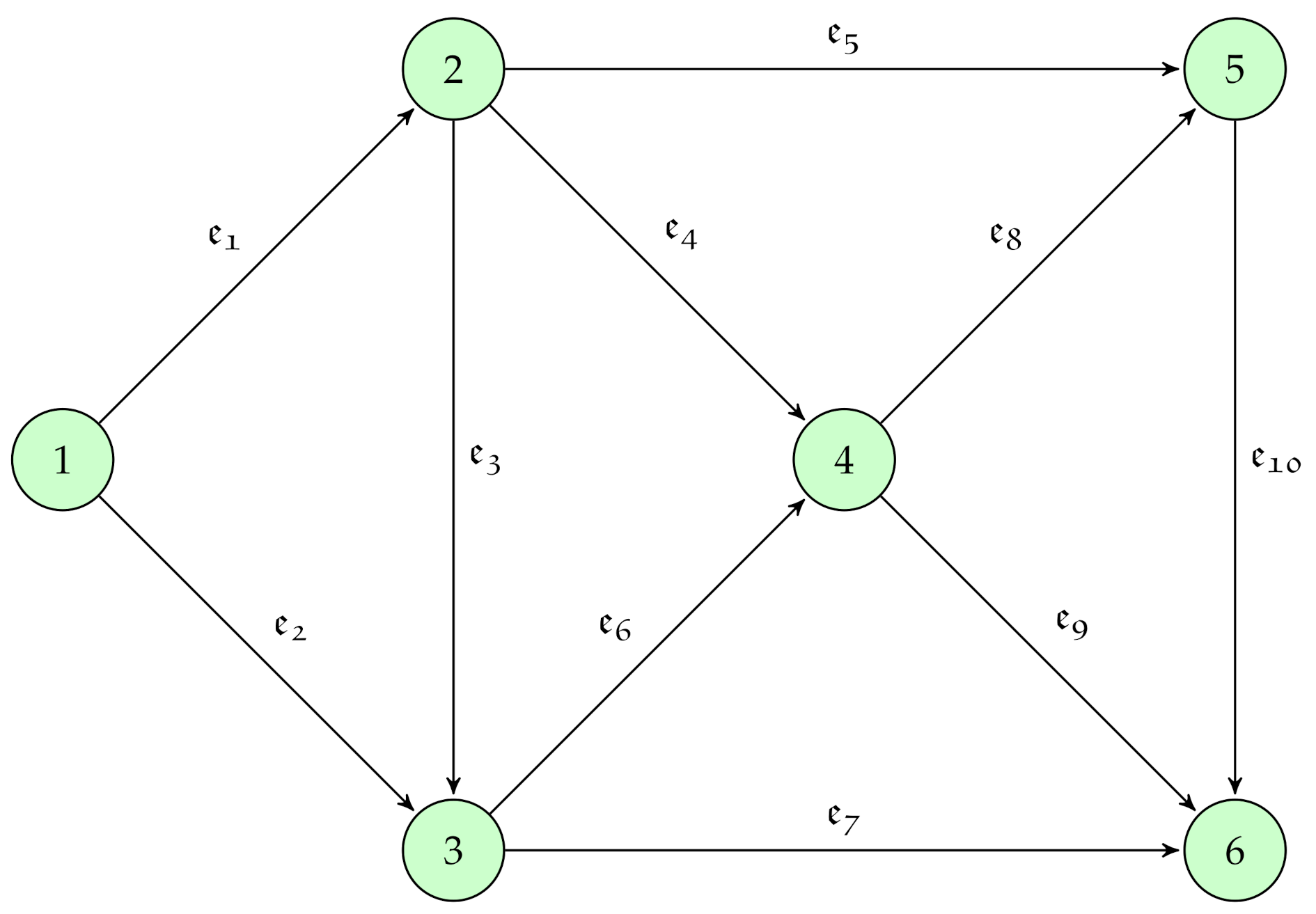
| Edges | LDFN | Edges | LDFN |
|---|---|---|---|
| (1,2) | (3,6) | ||
| (1,3) | (4,5) | ||
| (2,4) | (4,6) | ||
| (2,5) | (4,7) | ||
| (3,2) | (5,7) | ||
| (3,4) | (6,7) |
| Types of DAs | Advantages | Limitations |
|---|---|---|
| Classical DA [40] | It can be applied when precise arc weights are available | Its performance is degradedwhen arc weights are imprecise |
| Fuzzy DA [5] | It can be applied when arc weights are imprecise | It is degradedby the degree of rejection present in the arc weight |
| IF DA [9] | It deals with imprecise arc weights involving both the degree of acceptance and the degree of rejection | It does not work if the sum of the acceptance grade and the rejection grade of an arc weight exceeds 1 |
| PyF DA [44] | It can handle imprecise arc weights even if the sum of the acceptance grade and the rejection grade exceeds 1 with some constraints | It does not work if a reference parameter is added to the arc weight |
| LDF DA (proposed method) | It can be applied in many real-time situations that ave the reference parameters | It cannot work if the indeterminacy grade is present in the arc weight |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2021 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Parimala, M.; Jafari, S.; Riaz, M.; Aslam, M. Applying the Dijkstra Algorithm to Solve a Linear Diophantine Fuzzy Environment. Symmetry 2021, 13, 1616. https://doi.org/10.3390/sym13091616
Parimala M, Jafari S, Riaz M, Aslam M. Applying the Dijkstra Algorithm to Solve a Linear Diophantine Fuzzy Environment. Symmetry. 2021; 13(9):1616. https://doi.org/10.3390/sym13091616
Chicago/Turabian StyleParimala, Mani, Saeid Jafari, Muhamad Riaz, and Muhammad Aslam. 2021. "Applying the Dijkstra Algorithm to Solve a Linear Diophantine Fuzzy Environment" Symmetry 13, no. 9: 1616. https://doi.org/10.3390/sym13091616
APA StyleParimala, M., Jafari, S., Riaz, M., & Aslam, M. (2021). Applying the Dijkstra Algorithm to Solve a Linear Diophantine Fuzzy Environment. Symmetry, 13(9), 1616. https://doi.org/10.3390/sym13091616