
Multifrequency Topological Derivative Approach to Inverse Scattering Problems in Attenuating Media



{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
Abstract
:1. Introduction
2. Forward and Inverse Problems
2.1. Forward Problem
2.2. Inverse Problem
3. Topological Derivative-Based Approach
4. Multifrequency Method
5. Multifrequency Iterative Method
- Initialization. We initialize the method by computing the multifrequency topological derivative defined in (17) from the individual ones (as described in Theorem 1) with weights defined by (18). Then, we select a value and define the setFor our numerical experiments, we will set in principle . For numerical purposes, the set needs now to be decomposed in its connected components, which is performed by using the Matlab function bwconncomp as explained in [42], and then each connected component is approximated by a star-shaped parameterization as detailed in [39].
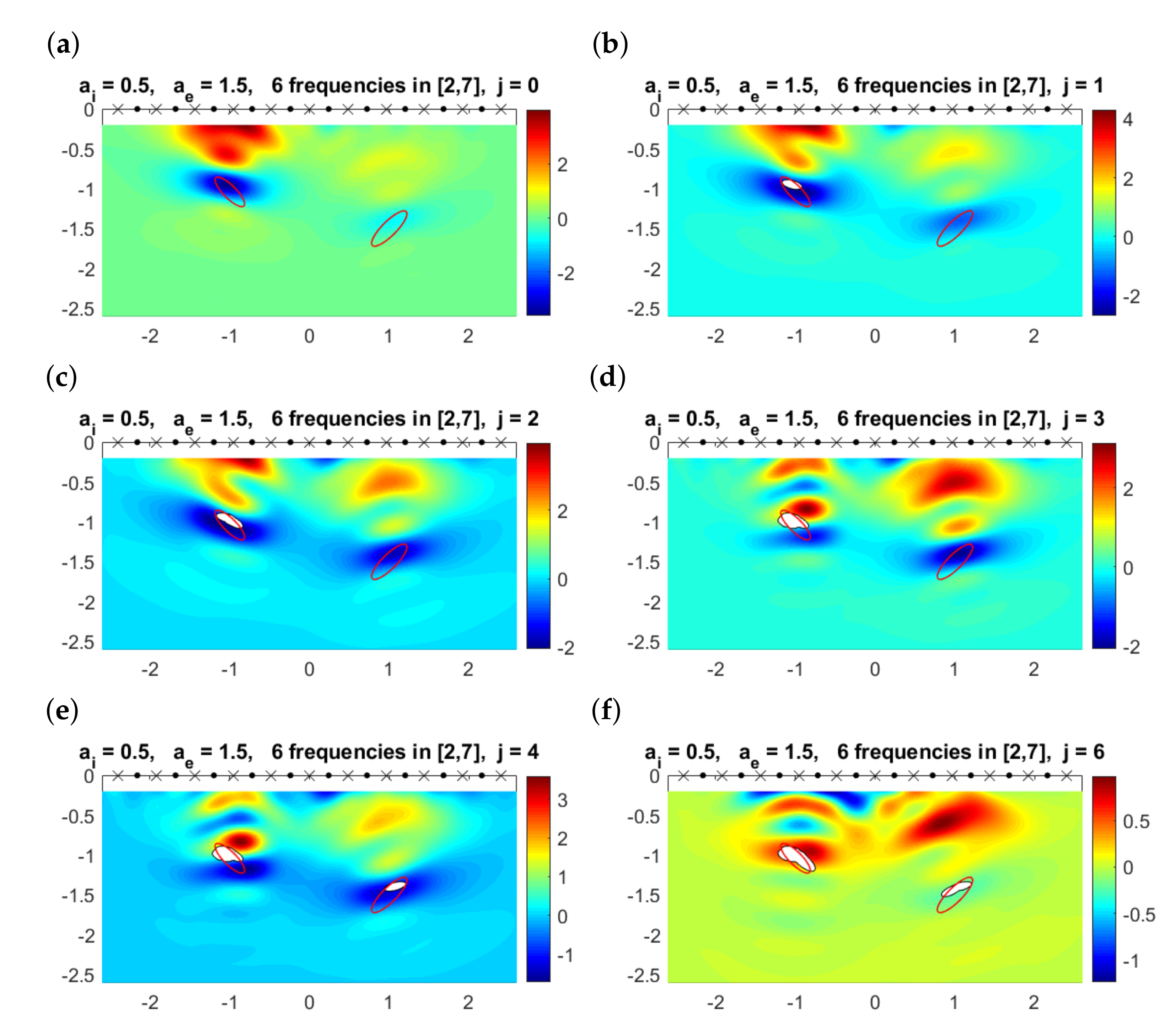
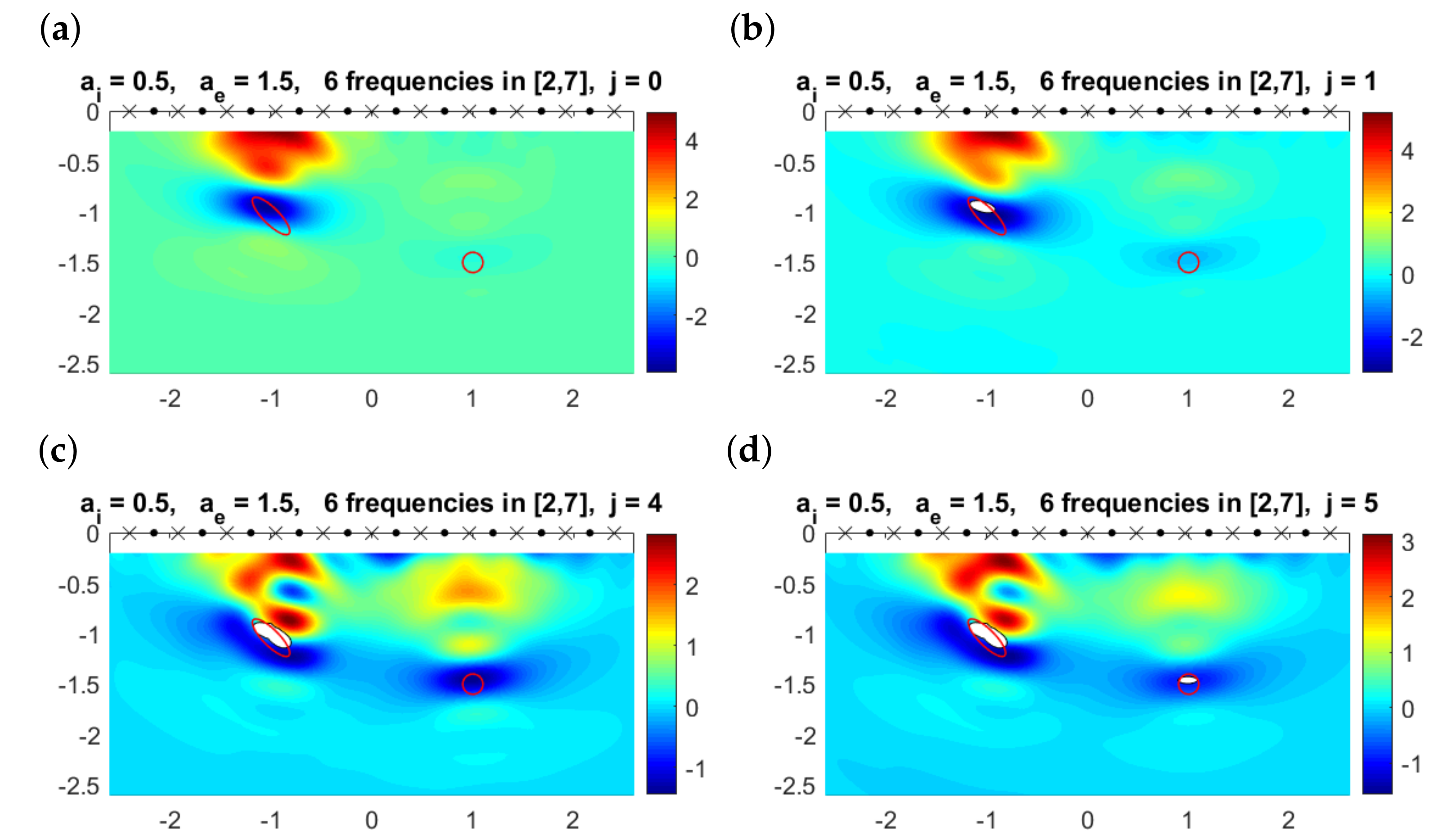
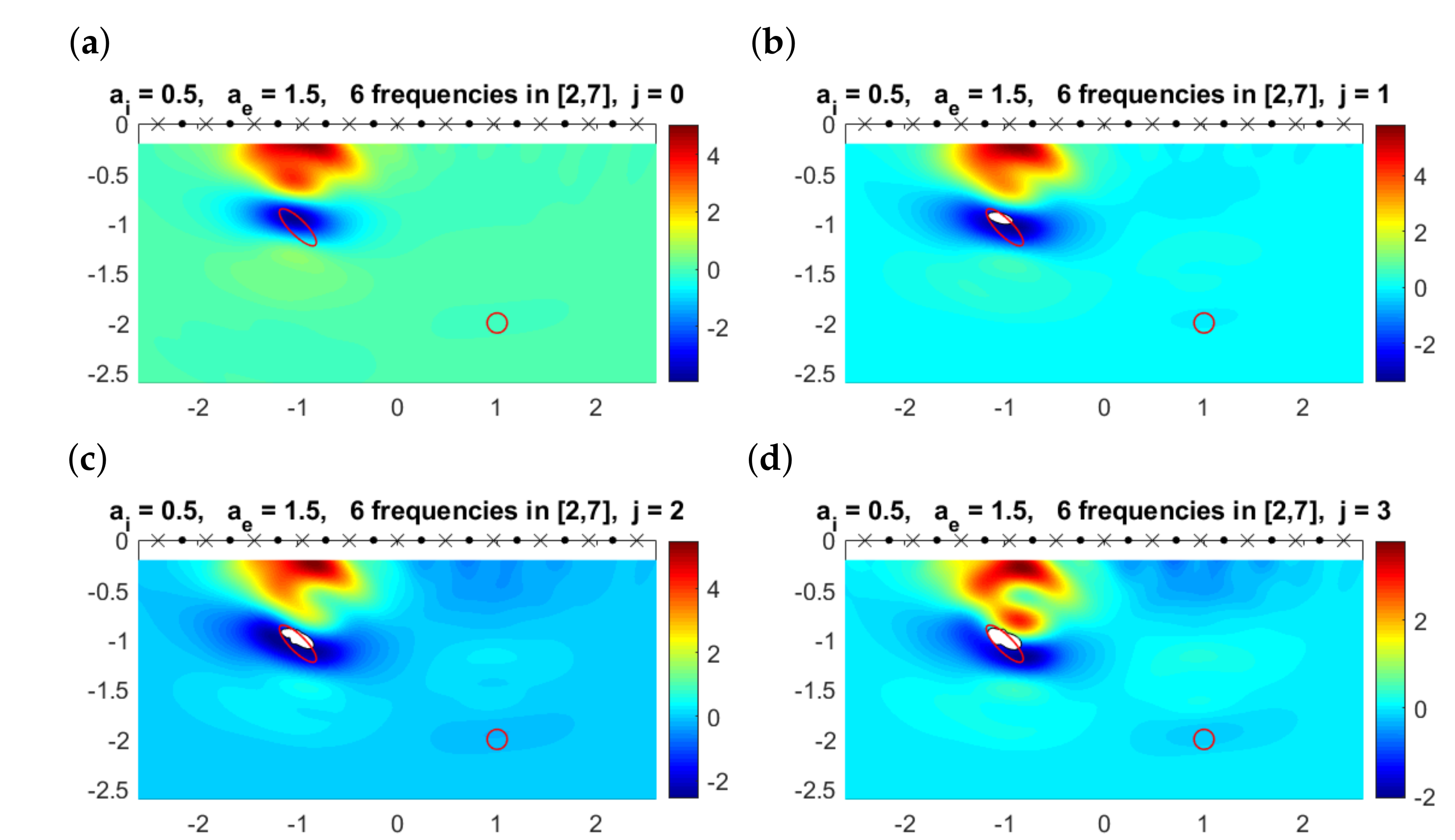
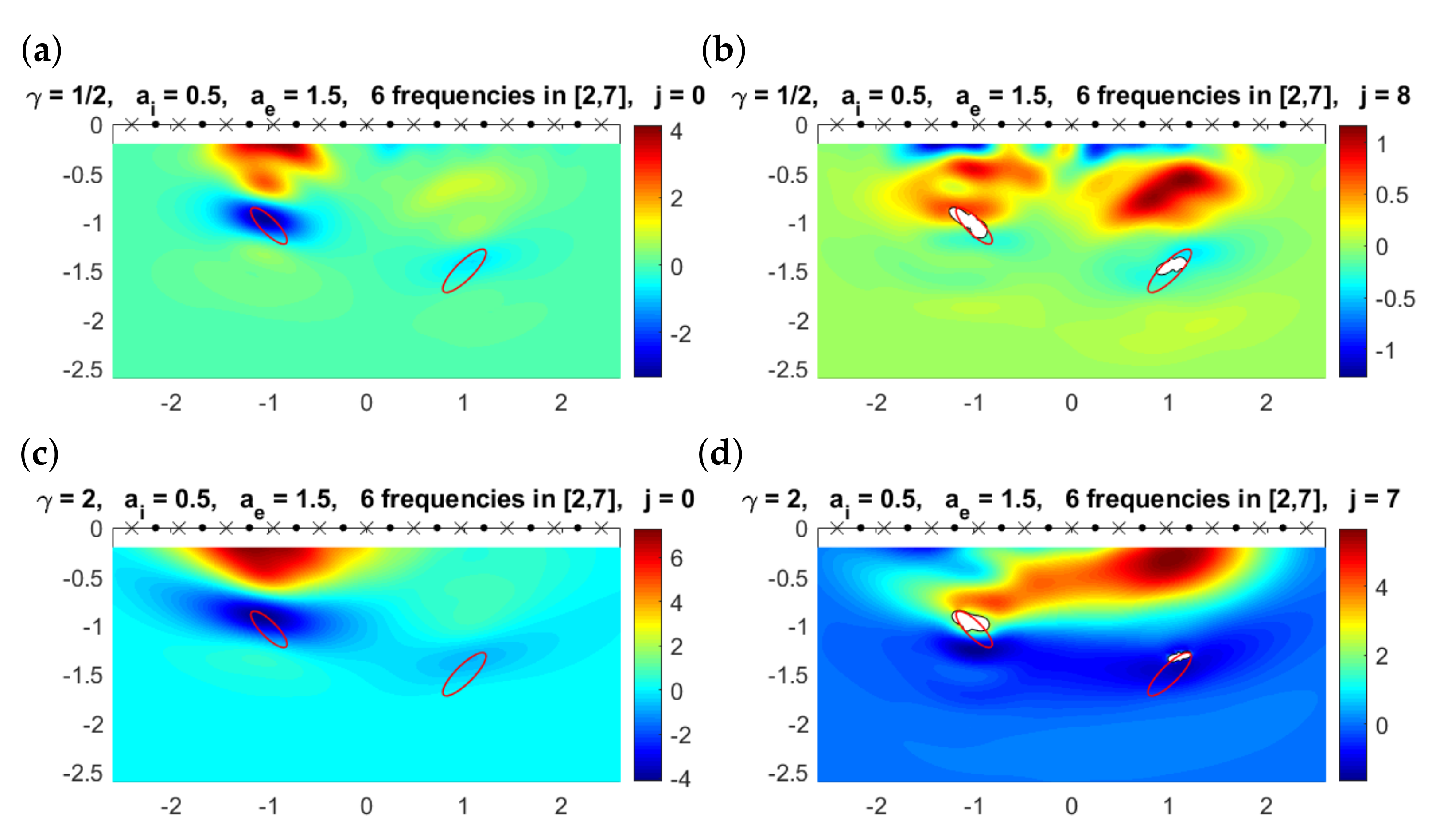
- Iteration. For each step we proceed as follows. Given the current approximation ,
- -
- We compute the monocromatic topological derivatives for making use of Theorem 2 with , to define the new multifrequency topological derivative:with weights . Notice that now the corresponding forward and adjoint problems involve the objects and therefore they have to be numerically solved.
- -
- We update the current set by adding to the points where the new topological derivative attains the largest negative values:In principle, . We calculate the number of connected components of and obtain star-shaped approximations of each of them, which form the final .
- -
- We check if each monofrequency shape functional decreases. If for , then is accepted. Otherwise, we replace by and compute again as in (24). The algorithm stops if either:
- *
- A maximum number of iterations is reached.
- *
- The measure of two consecutive approximations is negligible, namely if
- *
- Updating objects produces almost no variation for all the monofrequency functionals, i.e., if
- *
- The discrepancy principle for at least one of the frequencies is reached, that is, for anywhere is the noise level (see the end of Section 2.2).
6. Other Boundary Conditions
7. Conclusions
Author Contributions
Funding
Conflicts of Interest
References
- Jones, J.P.; Leenman, S. Ultrasonic tissue characterization: A review. Acta Electron. 1984, 26, 3–31. [Google Scholar] [CrossRef] [Green Version]
- Gaikovich, K.P.; Gaikovich, P.K.; Khilko, A.I. Multifrequency near-field acoustic tomography and holography of 3D subbottom inhomogeneities. Inverse Probl. Sci. Eng. 2017, 25, 1697–1718. [Google Scholar] [CrossRef]
- Roitner, H.; Burgholzer, P. Efficient modeling and compensation of ultrasound attenuation losses in photoacoustic imaging. Inverse Probl. 2011, 27, 015003. [Google Scholar] [CrossRef]
- Agaltsov, A.D.; Hohage, T.; Novikov, R.G. Global uniqueness in a pasive inverse problem of helioseismology. Inverse Probl. 2020, 36, 055004. [Google Scholar] [CrossRef] [Green Version]
- Liseno, A.; Pierri, R. Imaging of voids by means of a physical optics based shape reconstruction algorithm. J. Opt. Soc. Am. A 2004, 21, 968–974. [Google Scholar] [CrossRef] [Green Version]
- Devaney, A.J. Geophysical diffraction tomography. IEEE Trans. Geosci. Remote Sens. 1984, 22, 3–13. [Google Scholar] [CrossRef]
- Colton, D.; Gieberman, K.; Monk, P. A regularized sampling method for solving three dimensional inverse scattering problems. SIAM J. Sci. Comput. 2000, 21, 2316–2330. [Google Scholar] [CrossRef] [Green Version]
- Colton, D.; Kirsch, A. A simple method for solving inverse scattering problems in the resonance region. Inverse Probl. 1996, 12, 383–393. [Google Scholar] [CrossRef]
- Kirsch, A. Characterization of the shape of a scattering obstacle using the spectral data of the far field operator. Inverse Probl. 1998, 14, 1489–1512. [Google Scholar] [CrossRef]
- Natterer, F.; Wubbeling, F. A propagation backpropagation method for ultrasound tomography. Inverse Probl. 1995, 11, 1225–1232. [Google Scholar] [CrossRef]
- Kleinman, R.E.; van der Berg, P.M. A modified gradient method for two dimensional problems in tomography. J. Comput. Appl. Math. 1992, 42, 17–35. [Google Scholar] [CrossRef] [Green Version]
- Li, J.; Liu, H.; Zou, J. Locating multiple multiscale acoustic scatterers. Multiscale Model. Simul. 2014, 12, 927–952. [Google Scholar] [CrossRef]
- Sokolowski, J.; Zolésio, J.P. Introduction to Shape Optimization. Shape Sensitivity Analysis; Springer: Berlin/Heidelberg, Germany, 1992. [Google Scholar]
- Litman, A.; Lesselier, D.; Santosa, F. Reconstruction of a two-dimensional binary obstacle by controlled evolution of a level-set. Inverse Probl. 1998, 14, 685–706. [Google Scholar] [CrossRef]
- Dorn, O.; Lesselier, D. Level set methods for inverse scattering. Inverse Probl. 2006, 22, R67–R131. [Google Scholar] [CrossRef] [Green Version]
- Novotny, A.A.; Sokolowski, J. Topological derivatives in shape optimization. In Interaction of Mechanics and Mathematics; Springer: Berlin/Heidelberg, Germany, 2013. [Google Scholar]
- Feijoo, G.R. A new method in inverse scattering based on the topological derivative. Inverse Probl. 2004, 20, 1819–1840. [Google Scholar] [CrossRef]
- Novotny, A.A.; Sokolowski, J.; Zochowski, A. Topological derivatives of shape functionals. Part II: First-order method and applications. J. Optim. Theory Appl. 2019, 180, 683–710. [Google Scholar] [CrossRef]
- Novotny, A.A.; Sokolowski, J.; Zochowski, A. Applications of the topological derivative method. In Studies in Systems, Decision and Control; Springer: Cham, Switzerland, 2019; Volume 188. [Google Scholar]
- Park, W.K. Multi-frequency topological derivative for approximate shape acquisition of curve-like thin electromagnetic inhomogeneities. J. Math. Anal. Appl. 2013, 404, 501–518. [Google Scholar] [CrossRef] [Green Version]
- Park, W.K. Analysis of a multi-frequency electromagnetic imaging functional for thin, crack-like electromagnetic inclusions. Appl. Numer. Math. 2014, 77, 31–42. [Google Scholar] [CrossRef] [Green Version]
- Funes, J.F.; Perales, J.M.; Rapún, M.-L.; Vega, J.M. Defect detection from multi-frequency limited data via topological sensitivity. J. Math. Imaging Vis. 2016, 55, 19–35. [Google Scholar] [CrossRef]
- Tokmashev, R.; Tixier, A.; Guzina, A.B.B. Experimental validation of the topological sensitivity approach to elastic-wave imaging. Inverse Probl. 2013, 29, 125005. [Google Scholar] [CrossRef]
- Guzina, B.B.; Pourahmadian, F. Why the high-frequency inverse scattering by topological sensitivity may work. Proc. R. Soc. A Math. Phys. Eng. Sci. 2015, 471, 20150187. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Park, W.K. Performance analysis of multifrequency topological derivative for reconstructing perfectly conducting cracks. J. Comput. Phys. 2017, 335, 865–884. [Google Scholar] [CrossRef] [Green Version]
- Bonnet, M.; Cakoni, F. Analysis of topological derivative as a tool for qualitative identification. Inverse Probl. 2019, 35, 104007. [Google Scholar] [CrossRef] [Green Version]
- Abramowitz, M.; Stegun, I.A. Handbook of Mathematical Functions with Formulas, Graphs, and Mathematical Tables, Reprint of the 1972 ed.; Milton, A., Irene, A.S., Eds.; Dover Publications, Inc.: New York, NY, USA, 1992. [Google Scholar]
- Rapún, M.-L.; Sayas, F.-J. Boundary integral approximation of a heat-diffusion problem in time-harmonic regime. Numer. Algorithms 2006, 41, 127–160. [Google Scholar] [CrossRef]
- Colton, D.; Kress, R. Integral equation methods in scattering theory. Reprint of the 1983 original. In Classics in Applied Mathematics; Society for Industrial and Applied Mathematics (SIAM): Philadelphia, PA, USA, 2013; Volume 72. [Google Scholar]
- Chen, G.; Zhou, J. Boundary Element Methods. Computational Mathematics and Applications; Academic Press, Ltd.: London, UK, 1992. [Google Scholar]
- Rapún, M.-L.; Sayas, F.-J. Boundary element simulation of thermal waves. Arch. Comput. Methods Eng. 2007, 14, 3–46. [Google Scholar] [CrossRef]
- Costabel, M.; Stephan, E. A direct boundary integral equation method for transmission problems. J. Math. Anal. Appl. 1985, 106, 367–413. [Google Scholar] [CrossRef] [Green Version]
- Laliena, A.R.; Rapún, M.-L.; Sayas, F.J. Symmetric boundary integral formulations for Helmholtz transmission problems. Appl. Numer. Math. 2009, 59, 2814–2823. [Google Scholar] [CrossRef]
- Eschenauer, H.; Kobelev, V.; Shumacher, A. Bubble method for topology and shape optimization of structures. Struct. Optim. 1994, 8, 42–51. [Google Scholar] [CrossRef]
- Sokolowski, J.; Zochowski, A. On the topological derivative in shape optimization. SIAM J. Control Optim. 1999, 37, 1251–1272. [Google Scholar] [CrossRef] [Green Version]
- Guzina, B.B.; Bonnet, M. Small-inclusion asymptotic of misfit functionals for inverse problems in acoustics. Inverse Probl. 2006, 22, 1761–1785. [Google Scholar] [CrossRef]
- Carpio, A.; Rapún, M.-L. Domain reconstruction using photothermal techniques. J. Comput. Phys. 2008, 227, 8083–8106. [Google Scholar] [CrossRef]
- Carpio, A.; Rapún, M.-L. Parameter Identification in Photothermal Imaging. J. Math. Imaging Vis. 2014, 49, 273–288. [Google Scholar] [CrossRef]
- Carpio, A.; Rapún, M.-L. Topological derivatives for shape reconstruction. In Inverse Problems and Imaging; Lecture Notes Mathematics 1943; Springer: Berlin/Heidelberg, Germany, 2008; pp. 85–133. [Google Scholar]
- Li, J.; Li, P.; Liu, H.; Liu, X. Recovering multiscale buried anomalies in a two-layered medium. Inverse Probl. 2015, 31, 105006. [Google Scholar] [CrossRef] [Green Version]
- Ammari, H.; Chow, Y.T.; Liu, K. Optimal mesh size for inverse medium scattering problems. SIAM J. Numer. Anal. 2020, 58, 733–756. [Google Scholar] [CrossRef] [Green Version]
- Louër, F.L.; Rapún, M.-L. Topological sensitivity for solving inverse multiple scattering problems in three-dimensional electromagnetism. Part I: One step method. SIAM J. Imaging Sci. 2017, 10, 1291–1321. [Google Scholar] [CrossRef]
- Carpio, A.; Rapún, M.-L. Solving inhomogeneous inverse problems by topological derivative methods. Inverse Probl. 2008, 24, 045014. [Google Scholar] [CrossRef]
- Sarvazyan, A. Elastic properties of soft tissues. In Handbook of Elastic Properties of Solids, Liquids and Gases; Academic Press: New York, NY, USA, 2001; Volume 3, pp. 107–127. [Google Scholar]
- Carpio, A.; Pena, M.; Rapún, M.-L. Processing the 2D and 3D Fresnel experimental databases via topological derivative methods. Inverse Probl. 2021. Available online: https://iopscience.iop.org/article/10.1088/1361-6420/ac21c8 (accessed on 15 September 2021).
- Carpio, A.; Iakunin, S.; Stadler, G. Bayesian approach to inverse scattering with topological priors. Inverse Probl. 2020, 36, 105001. [Google Scholar] [CrossRef]
- Pommier, J.; Samet, B. The topological asymptotic for the Helmholtz equation with Dirichlet condition on the boundary of an arbitrarily shaped hole. SIAM J. Control Optim. 2004, 43, 899–921. [Google Scholar] [CrossRef]
- Samet, B.; Amstutz, S.; Masmoudi, M. The topological asymptotic for the Helmholtz equation. SIAM J. Control Optim. 2003, 42, 1523–1544. [Google Scholar] [CrossRef]
- Carpio, A.; Johansson, B.T.; Rapún, M.-L. Determining planar multiple sound-soft obstacles from scattered acoustic fields. J. Math. Imaging Vis. 2010, 36, 185–199. [Google Scholar] [CrossRef]
- Dominguez, N.; Gibiat, N. Non-destructive imaging using the time domain topological energy method. Ultrasonics 2010, 50, 367–372. [Google Scholar] [CrossRef]
- Rapún, M.-L. On the solution of direct and inverse multiple scattering problems for mixed sound-soft, sound-hard and penetrable objects. Inverse Probl. 2020, 36, 095014. [Google Scholar] [CrossRef]
- Carpio, A.; Dimiduk, T.G.; Rapún, M.-L.; Selgas, V. Noninvasive imaging of three-dimensional micro and nanostructures by topological methods. SIAM J. Imaging Sci. 2016, 9, 1324–1354. [Google Scholar] [CrossRef] [Green Version]
- Park, W.K. Non-iterative imaging of thin electromagnetic inclusions from multi-frequency response matrix. Prog. Electromagn. Res. 2010, 106, 225–241. [Google Scholar] [CrossRef] [Green Version]
- Griesmaier, R. Multi-frequency orthogonality sampling for inverse obstacle scattering problems. Inverse Probl. 2011, 27, 085005. [Google Scholar] [CrossRef]
- Joh, Y.-D.; Park, W.K. Analysis of multi-frequency subspace migration weighted by natural logarithmic function for fast imaging of two-dimensional thin, arc-like electromagnetic inhomogeneities. Comput. Math. Appl. 2014, 68, 1892–1904. [Google Scholar] [CrossRef] [Green Version]
- Potthast, R. A study on orthogonality sampling. Inverse Probl. 2010, 26, 074015. [Google Scholar] [CrossRef]
- Hohage, T.; Schormann, C. A Newton-type method for a transmission problem in inverse scattering. Inverse Probl. 1998, 14, 1207–1227. [Google Scholar] [CrossRef]
- Amstutz, S.; Andrä, H. A new algorithm for topology optimization using a level-set method. J. Comput. Phys. 2006, 216, 573–588. [Google Scholar] [CrossRef] [Green Version]
- Amstutz, S.; Giusti, S.M.; Novotny, A.A.; de Souza Neto, E.A. Topological derivative for multi-scale linear elasticity models applied to the synthesis of microstructures. Int. J. Numer. Methods Eng. 2010, 84, 733–756. [Google Scholar] [CrossRef]
- Amstutz, S. Analysis of a level set method for topology optimization. Optim. Methods Softw. 2011, 26, 555–573. [Google Scholar] [CrossRef]
- Ferrer, A. SIMP-ALL: A generalized SIMP method based on the topological derivative concept. Int. J. Numer. Methods Eng. 2019, 120, 361–381. [Google Scholar] [CrossRef] [Green Version]
- Gangl, P. A multi-material topology optimization algorithm based on the topological derivative. Comput. Methods Appl. Mech. Eng. 2020, 366, 113090. [Google Scholar] [CrossRef]
- Carpio, A.; Dimiduk, T.G.; Louër, F.L.; Rapún, M.-L. When topological derivatives met regularized Gauss-Newton iterations in holographic 3D imaging. J. Comput. Phys. 2019, 388, 224–251. [Google Scholar] [CrossRef] [Green Version]

















Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2021 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Carpio, A.; Rapún, M.-L. Multifrequency Topological Derivative Approach to Inverse Scattering Problems in Attenuating Media. Symmetry 2021, 13, 1702. https://doi.org/10.3390/sym13091702
Carpio A, Rapún M-L. Multifrequency Topological Derivative Approach to Inverse Scattering Problems in Attenuating Media. Symmetry. 2021; 13(9):1702. https://doi.org/10.3390/sym13091702
Chicago/Turabian StyleCarpio, Ana, and María-Luisa Rapún. 2021. "Multifrequency Topological Derivative Approach to Inverse Scattering Problems in Attenuating Media" Symmetry 13, no. 9: 1702. https://doi.org/10.3390/sym13091702
APA StyleCarpio, A., & Rapún, M. -L. (2021). Multifrequency Topological Derivative Approach to Inverse Scattering Problems in Attenuating Media. Symmetry, 13(9), 1702. https://doi.org/10.3390/sym13091702