
Online Dynamic Load Identification Based on Extended Kalman Filter for Structures with Varying Parameters




Abstract
:1. Introduction
2. Inverse Algorithm
- (1)
- Step 1: State updating
- (2)
- Step 2: Excitation identification
- (3)
- Step 3: Measurement updating
- the unknown parameters are the stiffness or the damping coefficients
- the unknown parameter are the mass coefficients.
| Algorithm 1. Flow of load identification based on extended Kalman filter |
| 1. Given initial conditions 2. Excitation identification step 3. Measurement update step 4. State update step |
3. Model Reduction Strategy
4. Numerical Validation
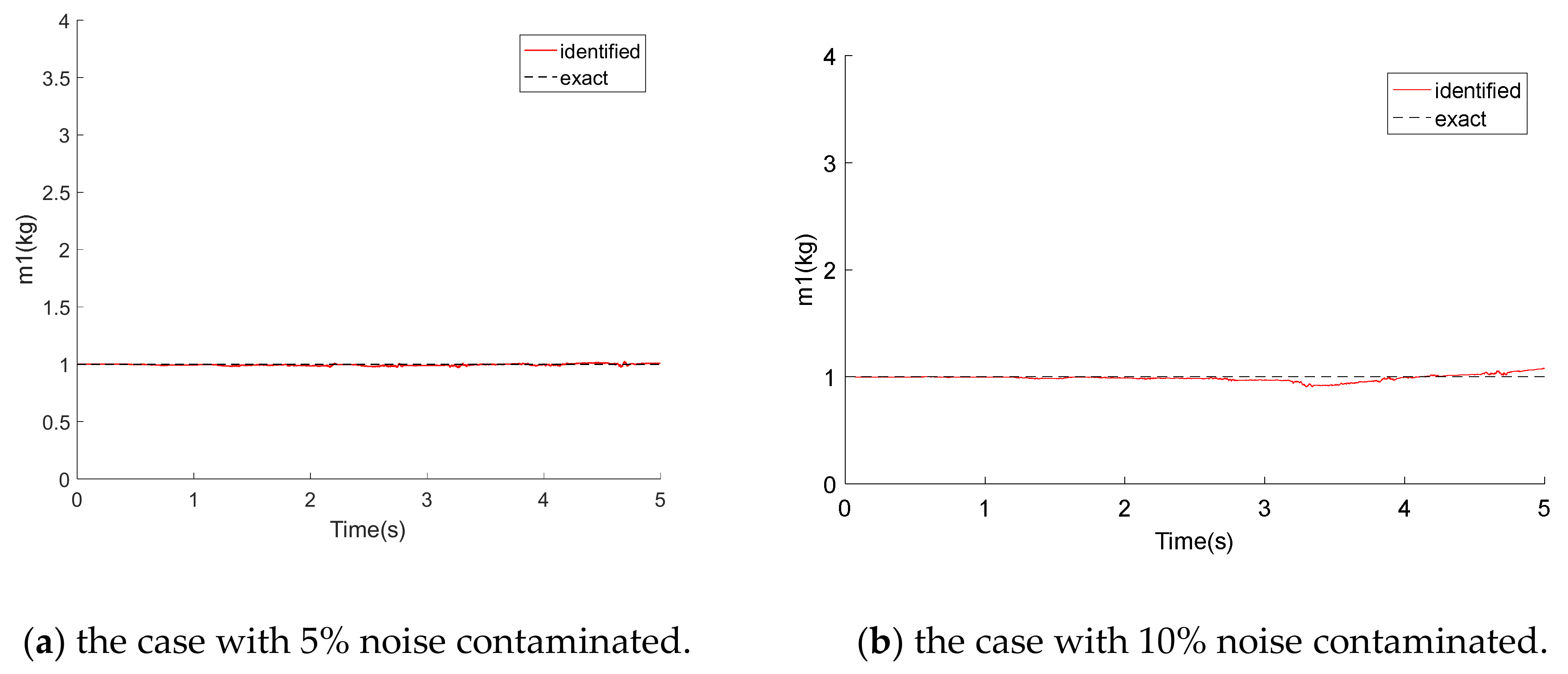
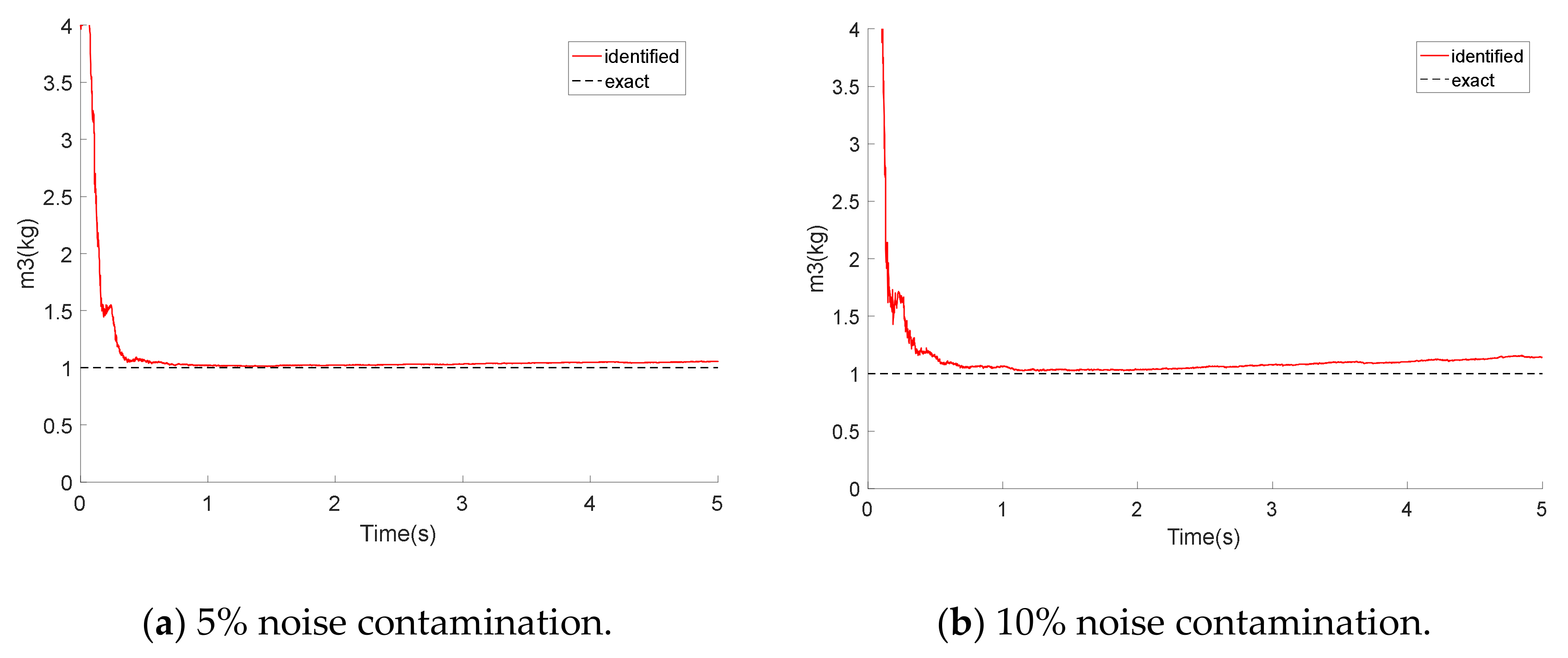
4.1. Three-Degrees-of-Freedom with Varying Mass
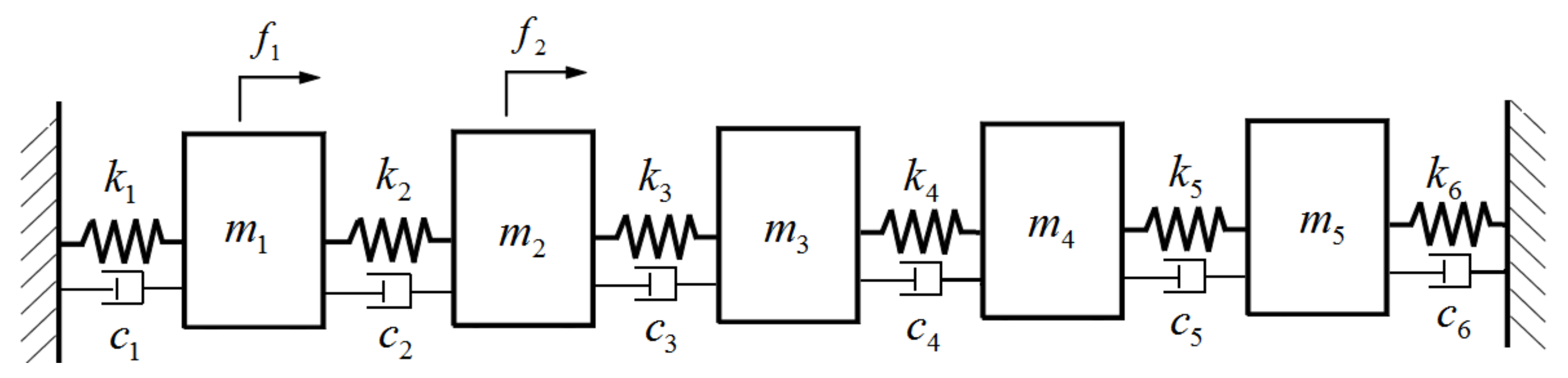
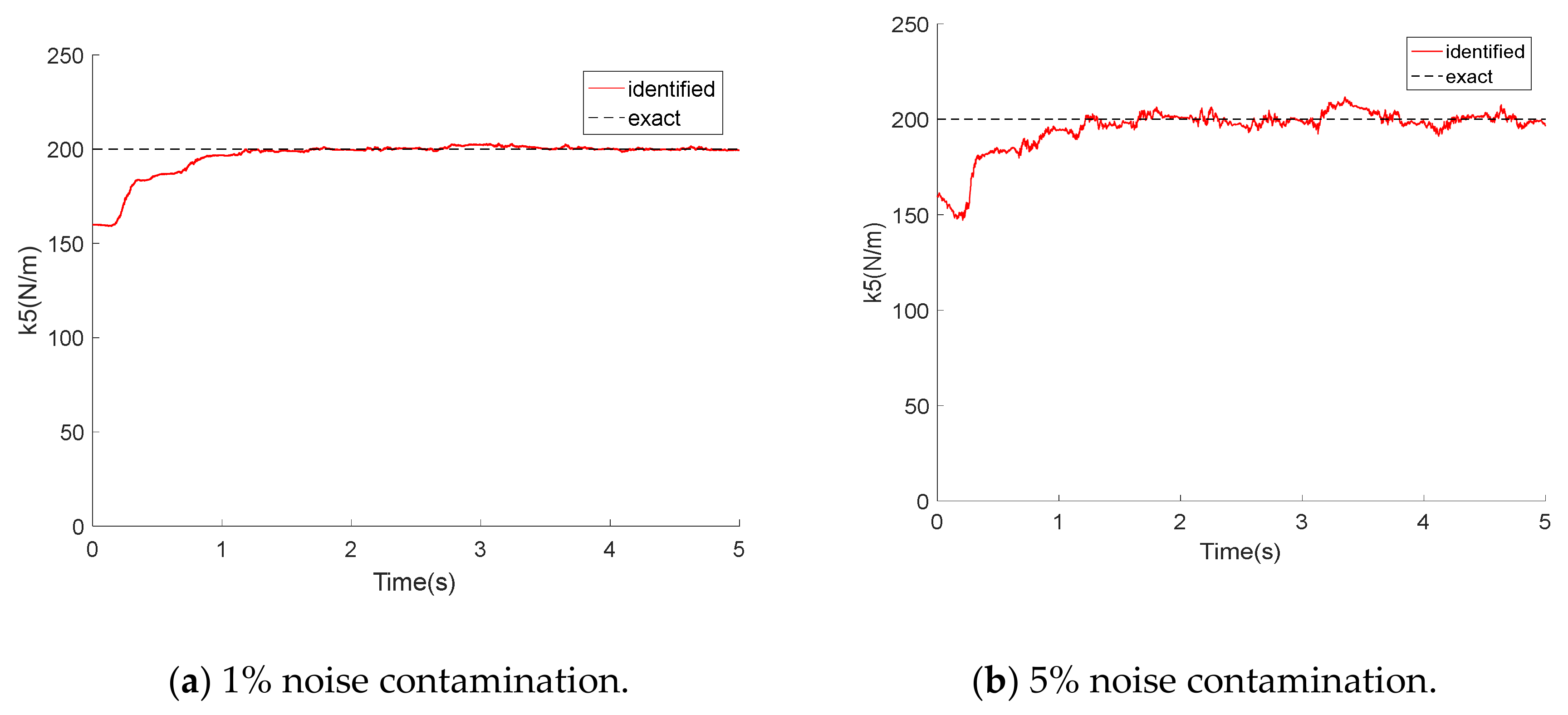
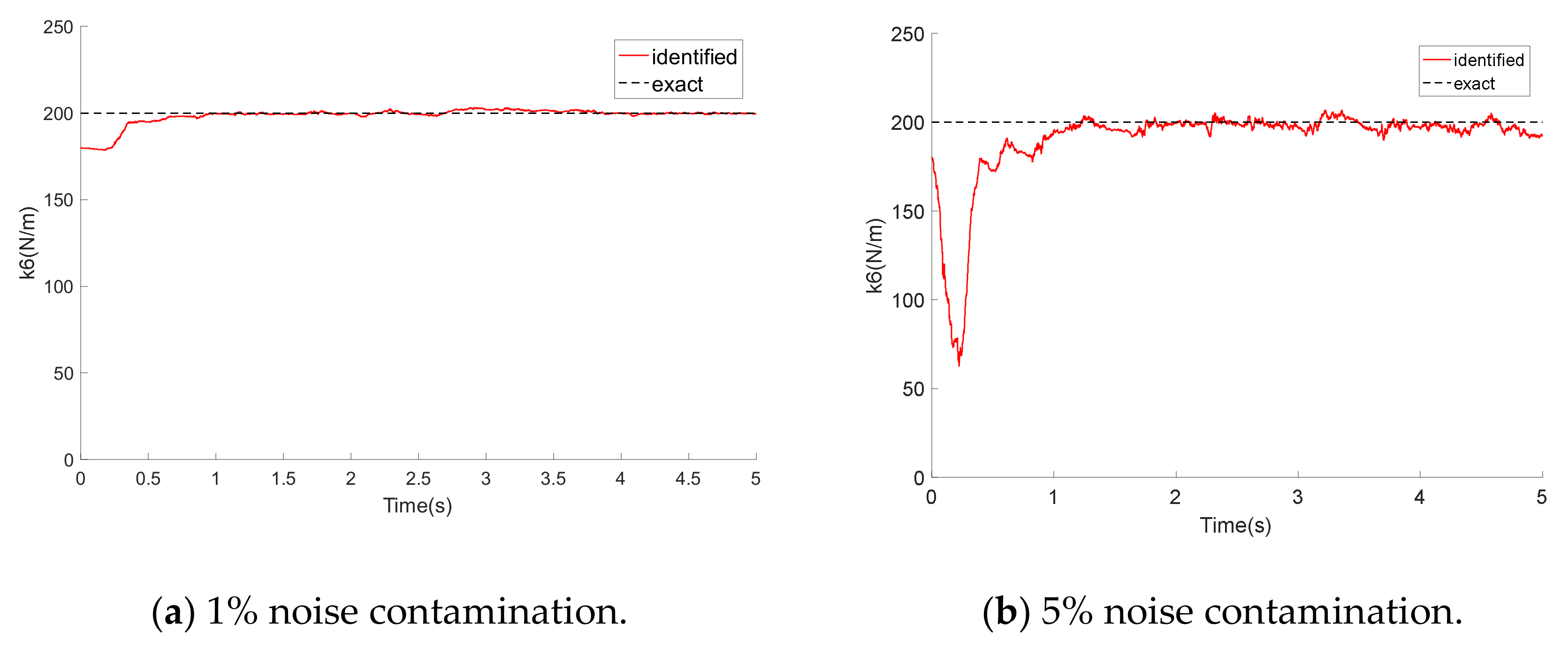
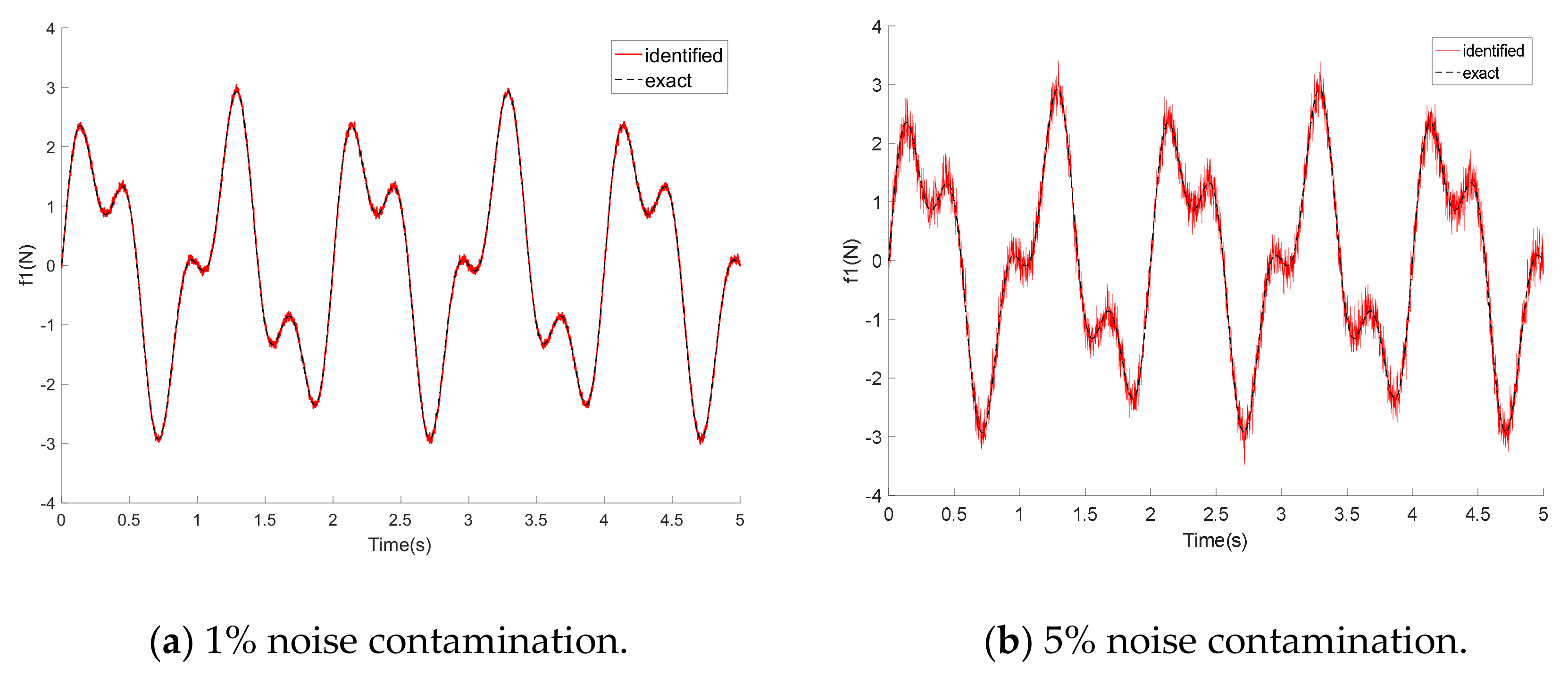
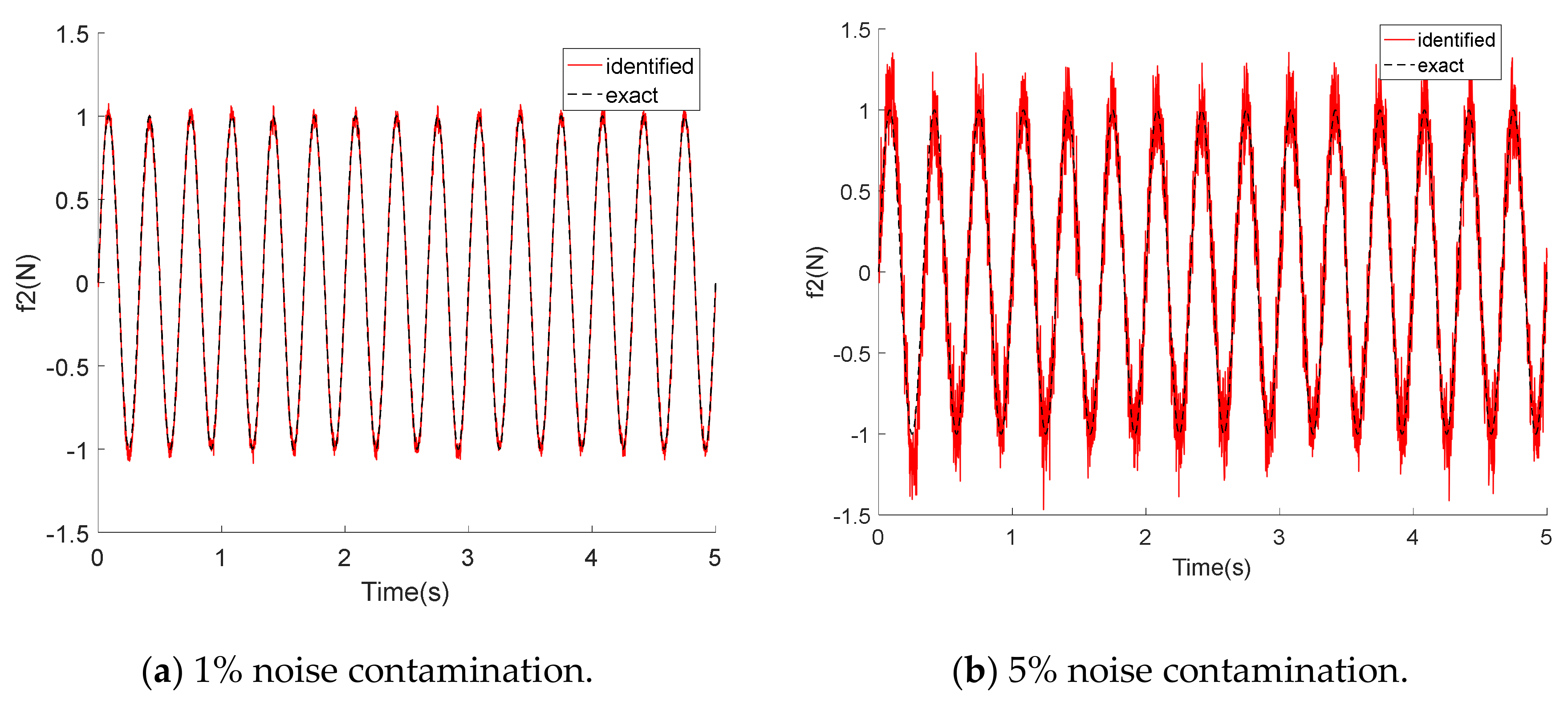
4.2. Five-Degree-of-Freedom with Varying Stiffness
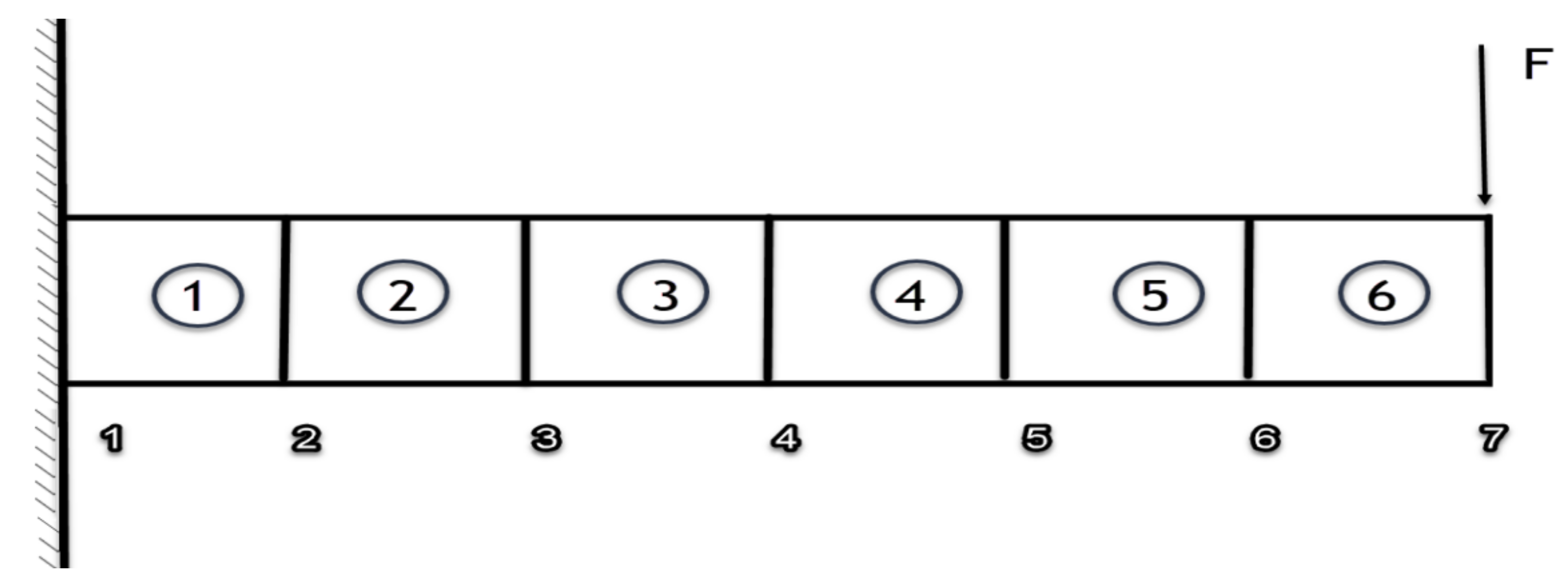
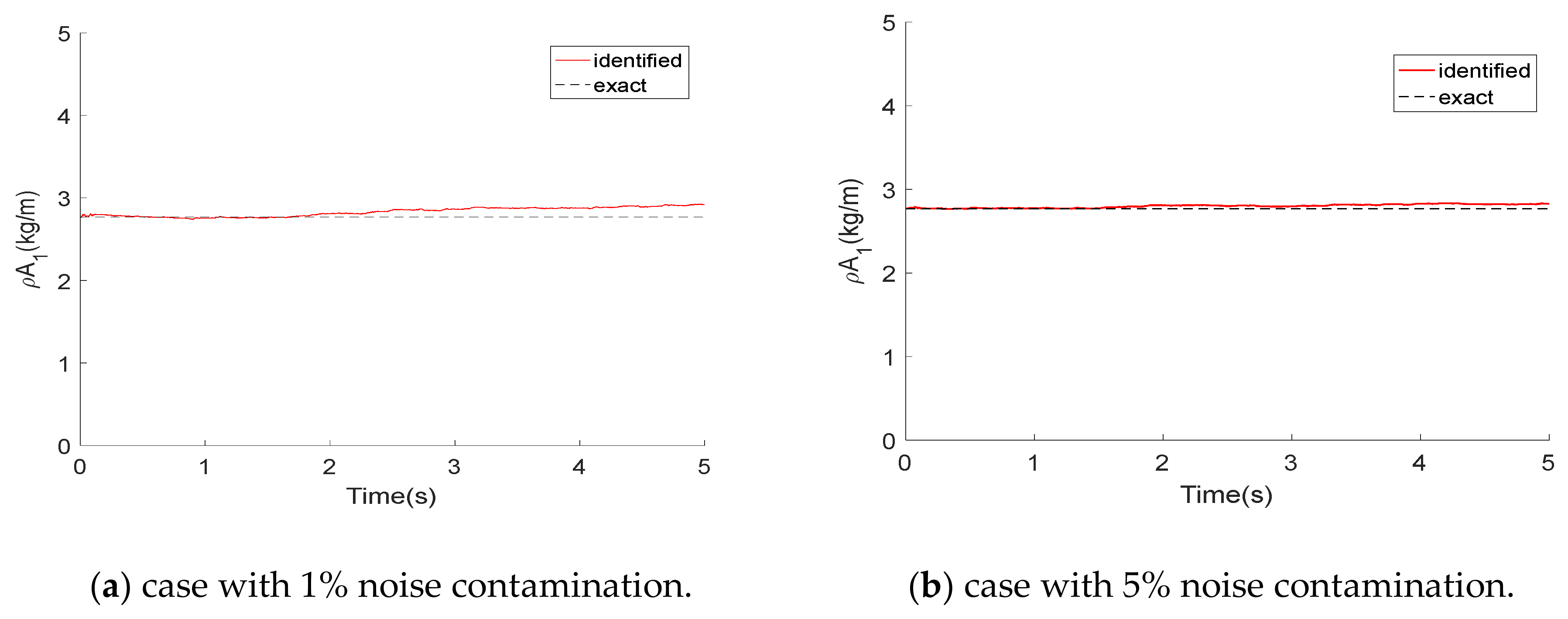
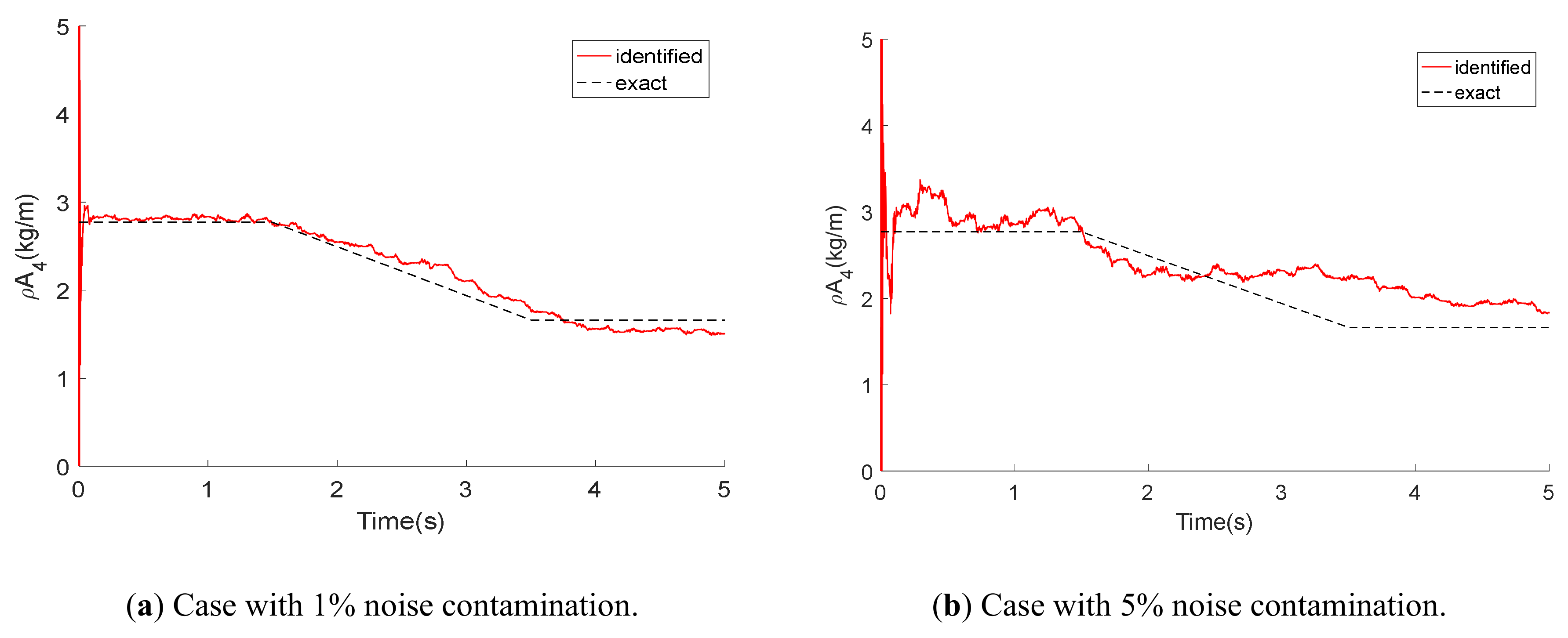
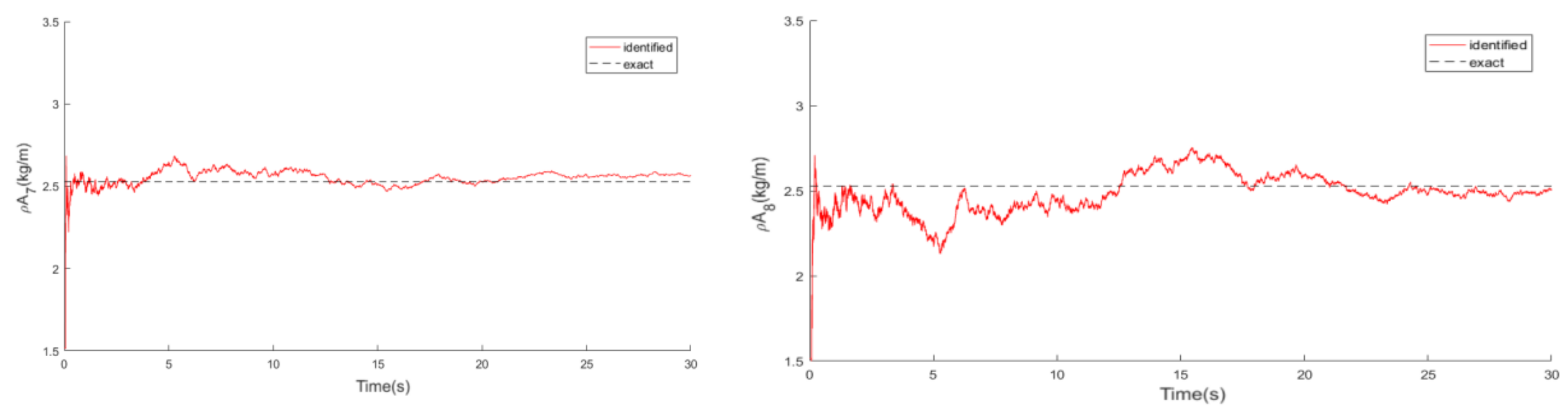
4.3. Cantilever with Varying Mass
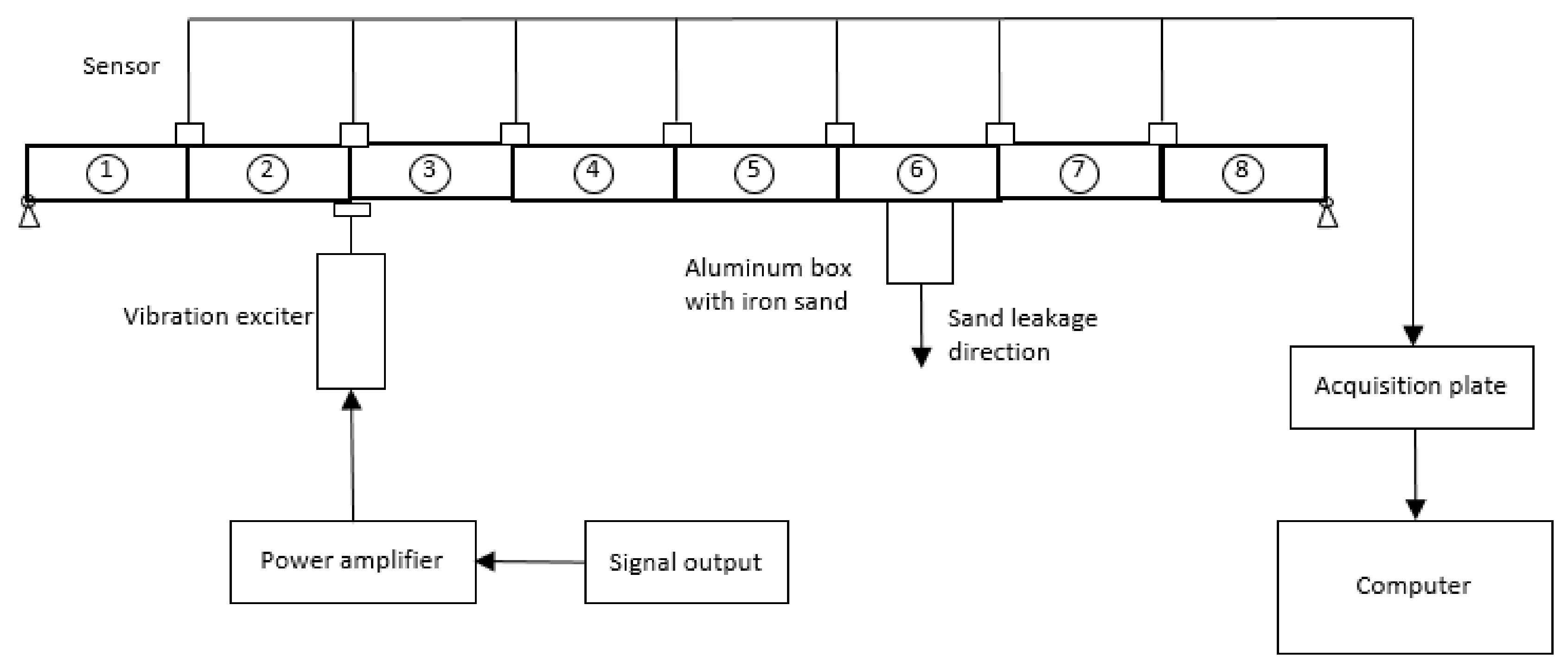
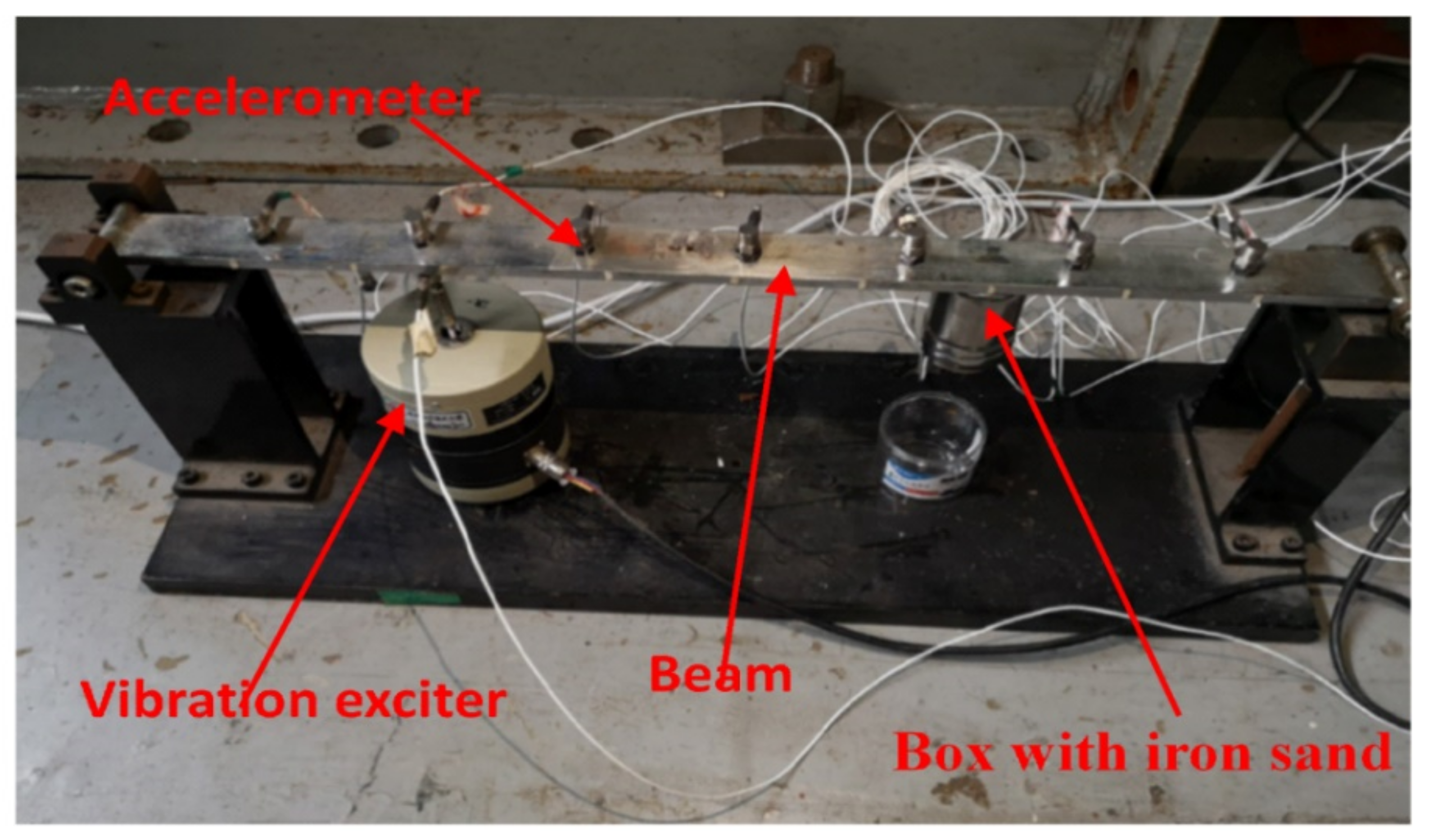
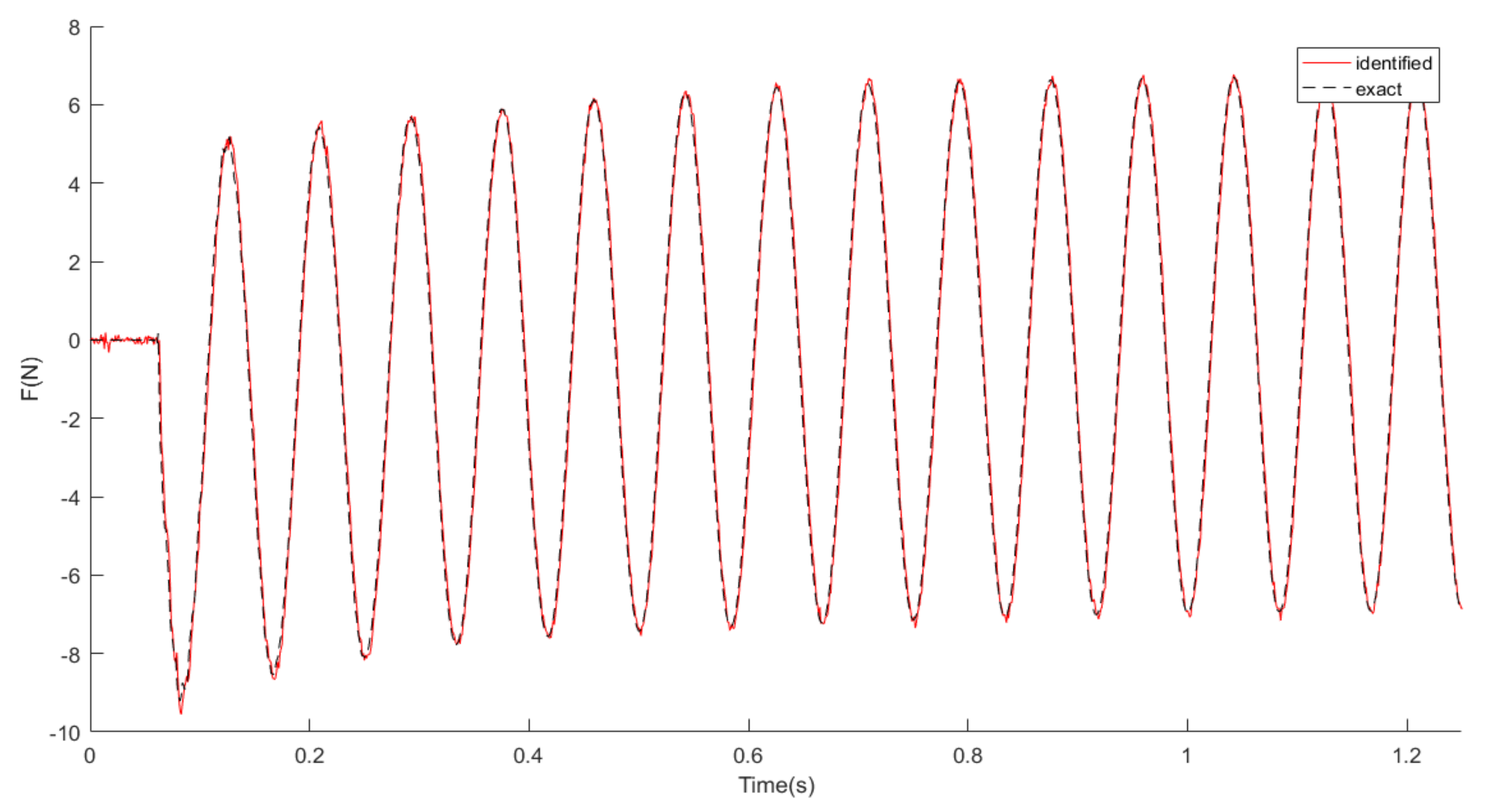
5. Experimental Validation
6. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Conflicts of Interest
References
- Bernal, D.; Gunes, B. Flexibility Based Approach for Damage Characterization: Benchmark Application. J. Eng. Mech. 2004, 130, 61–70. [Google Scholar] [CrossRef]
- Cheng, W.; Bo, Y. A Time Domain Identification Method for Distributed Dynamic Loads in Spatial Structures. Appl. Math. Mech. 2017, 38, 967–978. [Google Scholar]
- Koh, C.G.; See, L.M.; Balendra, T. Estimation of structural Parameters in time domain: A substructure approach. Earthq. Eng. Struct. Dyn. 1991, 20, 787–801. [Google Scholar] [CrossRef]
- Brincker, R.; Zhang, L.; Andersen, P. Modal identification of output-only systems using frequency domain decomposition. Smart Mater. Struct. 2001, 10, 441–445. [Google Scholar] [CrossRef] [Green Version]
- Weixin, R.; Harik, I.E. Modal analysis of the Cumberland river bridge on I-24 highway in West Kentucky. In Proceedings of the 19th International Modal Analysis Conference, Kissimmee, FL, USA, 5–8 February 2001; pp. 21–27. [Google Scholar]
- Huokun, L.; Jijian, L. Operational Modal Parameter Identification of High Arch Dam under Flood Discharge Excitation Based on Frequency Domain Decomposition Method. J. Vib. Shock 2008, 27, 149–153. [Google Scholar]
- Xu, B.; He, J.; Rovekamp, R.; Dyked, S.J. Structural parameters and dynamic loading identification from incomplete measurements: Approach and validation. Mech. Syst. Signal Process. 2012, 28, 244–257. [Google Scholar] [CrossRef]
- Cole, H.A. On Line Failure Detection and Damping Measurement of Aerospace Structure by Random Decrement Signature. AIAA 1968, 68, 288–319. [Google Scholar]
- Ibrahim, S.R. Efficient Random Decrement Computation for identification of Ambient Responses. In Proceedings of the 19th International Modal Analysis Conference, Kissimmee, FL, USA, 5–8 February 2001; pp. 1–6. [Google Scholar]
- Peeters, B.; De Roeck, G. Reference-based stochastic subspace identification for out-put-only modal analysis. Mech. Syst. Signal Process. 1999, 13, 855–878. [Google Scholar] [CrossRef] [Green Version]
- Juang, J.N.; Pappa, R.S. An eigensystem realization algorithm for modal parameter identification and model reduction. J. Guid. Control Dyn. 1985, 8, 620–627. [Google Scholar] [CrossRef]
- James, G.H.; Carne, T.G.; Lauffer, J.P. The natural excitation technique(NEXT)for modal parameter extraction from operating structures. Int. J. Anal. Exp. Modal Anal. 1995, 10, 260–277. [Google Scholar]
- Arrar, C.R.; James, G.H. System identification from ambient vibration measurements on a Bridge. J. Sound Vib. 1997, 205, 1–18. [Google Scholar]
- Hoshiya, M.; Saito, E. Structural Identification by Extended Kalman Filter. J. Eng. Mech. 1984, 110, 1757–1770. [Google Scholar] [CrossRef]
- Loh, C.H.; Lin, C.Y.; Huang, C.C. Time Domain Identification of Frames under Earthquake Loading. J. Eng. Mech. 2000, 126, 693–703. [Google Scholar] [CrossRef]
- Sato, T.; Qi, K. Adaptive H∞ Filter: Its Application to Structural Identification. J. Eng. Mech. 1998, 124, 1233–1240. [Google Scholar] [CrossRef]
- Yoshida, I. Damage detection using Monte Carlo filter based on non-Gaussian noise. In Proceedings of the Structural Safety and Reliability, ICOSSAR’01, Newport Beach, CA, USA, 17–22 June 2001; Swet Zeitinger: Lisse, The Netherlands, 2001. [Google Scholar]
- Ellis, N. A technique for evaluating the fluctuating aerodynamic forces on a flexible building. In Proceedings of the International Symposium on Vibrating Problems in Industry, Keswick, UK, 10–12 April 1973. [Google Scholar]
- Bartlett, F.D.; Flannelly, W.D. Model verification of force determination for measuring vibration loads. J. Am. Helicopter Soc. 1979, 19, 10–18. [Google Scholar] [CrossRef]
- Hirotsugu, I.; Hiroyuki, I.; Kikuo, K.; Toshikazu, S. Measurement of Impact Load by Using an Inverse Analysis Technique. JSME Int. J. Ser. 1 Solid Mech. Strength Mater. 1991, 34, 453–458. [Google Scholar]
- Milana, S.; Sinibaldi, G.; Marino, L.; Culla, A. Load identification by coherence analysis of structural response. Acoust. Soc. Am. J. 2017, 141, 3833. [Google Scholar] [CrossRef]
- Yang, J.N.; Huang, H.; Lin, S. Sequential non-linear least-square estimation for damage identification of structures. Int. J. Non-Linear Mech. 2006, 41, 124–140. [Google Scholar] [CrossRef]
- Zhang, F.; Tang, X.; Qin, Y. The Identification Method Research of Dynamic Random Load Distributing on Structure. J. Vibrat. Shock 2012, 31, 1–4, 15. [Google Scholar]
- Jiang, J.; Mohamed, M.S.; Seaid, M.; Li, H. Identifying the wavenumber for the inverse Helmholtz problem using an enriched finite element formulation. Comput. Methods Appl. Mech. Eng. 2018, 340, 615–629. [Google Scholar] [CrossRef] [Green Version]
- Jiang, J.; Mohamed, M.S.; Seaid, M.; Li, H. Inverse algorithm for real-time road roughness estimation for autonomous vehicles. Arch. Appl. Mech. 2020, 90, 1333–1348. [Google Scholar] [CrossRef]
- Ory, H.; Glaser, H.; Holzdeppe, D. Reconstruction of forcing functions based on measured structural responses. In Proceedings of the 2nd International Symposium on Aeroelasticity and Structural Dynamics, Aachen, Germany, 1–3 April 1985; pp. 656–668. [Google Scholar]
- Wu, E.; Tsai, T.D.; Yen, C.S. Two methods for determining impact-force history on elastic plates. Exp. Mech. 1995, 35, 11–18. [Google Scholar] [CrossRef]
- Gunawan, F.E.; Homma, H.; Morisawa, Y. Impact force estimation by quadratic spline approximation. J. Solid Mech. Mater. Eng. 2008, 2, 1092–1103. [Google Scholar] [CrossRef]
- Xuegang, S.; Peng, L.; Zhuming, C. An Algorithm of Dynamic Load Identification Based on FGB Sensor and Kalman Filter. Acta Opt. Sin. 2018, 38, 0328012. [Google Scholar] [CrossRef]
- Kalman, R.E. A New Approach to Linear Filtering and Prediction Problems. J. Fluids Eng. 1960, 82, 35–45. [Google Scholar] [CrossRef] [Green Version]
- Yang, J.N.; Pan, S.; Huang, H. An adaptive extended Kalman filter for structural damage identifications II: Unknown inputs. Struct. Control Health Monit. 2007, 14, 497–521. [Google Scholar] [CrossRef]
- Lenkutis, T.; Cerškus, A.; Šešok, N. Road Surface Profile Synthesis: Assessment of Suitability for Simulation. Symmetry 2021, 13, 68. [Google Scholar] [CrossRef]
- Lei, Y.; Jiang, Y.; Xu, Z. Structural damage detection with limited input and output measurement signals. Mech. Syst. Signal Process. 2012, 28, 229–243. [Google Scholar] [CrossRef]
- Naets, F.; Croes, J.; Desmet, W. An online coupled state/input/parameter estimation approach for structural dynamics. Comput. Methods Appl. Mech. Eng. 2015, 283, 1167–1188. [Google Scholar] [CrossRef]
- Du, H.; Kong, W.; Wang, Y.; Liu, W.; Huang, M.; Zhang, W.; Tang, M. Research on Rotorcraft Blade Tip Vortex Identification and Motion Characteristics in Hovering State. Symmetry 2020, 12, 196. [Google Scholar] [CrossRef] [Green Version]
- Huang, Q.; Xu, Y.L.; Liu, H.J. An efficient algorithm for simultaneous identification of time-varying structural parameters and unknown excitations of a building structure. Eng. Struct. 2015, 98, 29–37. [Google Scholar] [CrossRef]
- Lei, Y.; Xia, D.; Erazo, K.; Nagarajaiah, S. A novel unscented Kalman filter for recursive state-input-system identification of nonlinear systems. Mech. Syst. Signal Process. 2019, 127, 120–135. [Google Scholar] [CrossRef]
- Xiaoxiong, Z.; Jia, H. Identification of Structural Parameters and Unknown Excitations Basend on the Extended Kalman Filter. Eng. Mech. 2019, 36, 221–230. [Google Scholar]
- Anhua, Y. Parameter Identification of Shear-Type Frame Structures Based on Kalman Filter; Fujian Agriculture and Forestry University: Fuzhou, China, 2019. [Google Scholar]































{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Mass Coefficient | t = 1 s | t = 5 s | |||||
|---|---|---|---|---|---|---|---|
| Identification (kg) | Exact (kg) | Error (%) | Identification (kg) | Exact (kg) | Error (%) | ||
| 5% noise | m1 | 1.013 | 1 | 1.3 | 0.9867 | 1 | 1.3 |
| m2 | 1.087 | 1 | 8.7 | 3.022 | 3 | 0.7 | |
| m3 | 0.9856 | 1 | 1.4 | 1.006 | 1 | 0.6 | |
| 10% noise | m1 | 1.002 | 1 | 0.2 | 1.142 | 1 | 14.2 |
| m2 | 1.025 | 1 | 2.5 | 3.049 | 3 | 4.9 | |
| m3 | 1.051 | 1 | 5.1 | 1.139 | 1 | 13.9 | |
| Noise Level | Relative Error (RE) (%) | Correlation Coefficient (r) (%) |
|---|---|---|
| 5% noise | 9.55 | 99.48 |
| 10% noise | 17.75 | 98.44 |
| Stiffness Coefficient | t = 1 s | t = 5 s | |||||
|---|---|---|---|---|---|---|---|
| Identification (N/m) | Exact (N/m) | Error (%) | Identification (N/m) | Exact (N/m) | Error (%) | ||
| 1% noise | k3 | 198.8 | 200 | 0.6 | 199.3 | 200 | 0.35 |
| k4 | 199.2 | 200 | 0.4 | 118.4 | 120 | 1.33 | |
| k5 | 199.6 | 200 | 0.2 | 198.9 | 200 | 0.55 | |
| k6 | 199.8 | 200 | 0.1 | 199.2 | 200 | 0.4 | |
| 5% noise | k3 | 187.2 | 200 | 6.4 | 194.4 | 200 | 2.8 |
| k4 | 191.8 | 200 | 4.1 | 118.8 | 120 | 1 | |
| k5 | 198.7 | 200 | 0.65 | 197.5 | 200 | 1.25 | |
| k6 | 201 | 200 | 0.5 | 195.6 | 200 | 2.2 | |
| Noise Level | Relative Error (RE) (%) | Correlation Coefficient (r) (%) | |
|---|---|---|---|
| 1% noise | f1 | 2.64 | 99.97 |
| f2 | 4.98 | 99.88 | |
| 5% noise | f1 | 10.24 | 99.32 |
| f2 | 19.85 | 98.05 | |
| Mass Characteristic | t = 1 s | t = 5 s | |||||
|---|---|---|---|---|---|---|---|
| Identification (kg/m) | Exact (kg/m) | Error (%) | Identification (kg/m) | Exact (kg/m) | Error (%) | ||
| 1% noise | 2.76 | 2.77 | 3.61 | 2.903 | 2.77 | 4.8 | |
| 2.818 | 2.77 | 1.73 | 2.506 | 2.77 | 9.53 | ||
| 2.765 | 2.77 | 0.18 | 2.944 | 2.77 | 6.28 | ||
| 2.773 | 2.77 | 0.11 | 1.554 | 1.662 | 6.49 | ||
| 2.785 | 2.77 | 0.54 | 2.908 | 2.77 | 4.98 | ||
| 5% noise | 2.773 | 2.77 | 0.11 | 2.829 | 2.77 | 2.13 | |
| 2.285 | 2.77 | 17.51 | 2.349 | 2.77 | 15.20 | ||
| 3.172 | 2.77 | 14.51 | 3.155 | 2.77 | 13.89 | ||
| 2.518 | 2.77 | 9.09 | 1.863 | 1.662 | 7.26 | ||
| 2.924 | 2.77 | 5.56 | 2.949 | 2.77 | 6.46 | ||
| Noise Level | Relative Error (RE) (%) | Correlation Coefficient (r) (%) |
|---|---|---|
| 1% noise | 2.74 | 99.96 |
| 5% noise | 13.66 | 99.08 |
| Parameters of Simply Supported Beam | Value |
|---|---|
| Length | 0.7 m |
| Width | 0.04 m |
| Thickness | 0.008 m |
| Density | 7800 kg/m3 |
| Elastic Modulus | 209 GPa |
| Poisson’s ratio | 0.30 |
| Order | Experimental Results (Hz) | Simulation Results (Hz) | Error (%) |
|---|---|---|---|
| 1 | 37.864 | 37.8051 | 0.156 |
| 2 | 151.74 | 151.264 | 0.314 |
| 3 | 337.58 | 340.8637 | 0.963 |
| 4 | 603.5 | 609.2473 | 0.943 |
| Equipment Classification | Name |
|---|---|
| Vibration Exciter | JZT-2 Permanent magnet exciter |
| Power amplifier | HEAS-50 Power amplifier |
| Dynamic signal acquisition board | NI PXIe-4499 Capture card |
| Signal acquisition instrument | NI PXI |
| Sensor | PCB 356A33 accelerometer |
| Software | NI Signal Express |
| Mass Characteristic | Before Mass Changes | After Mass Changed | ||||
|---|---|---|---|---|---|---|
| Identification (kg/m) | Exact (kg/m) | Error (%) | Identification (kg/m) | Exact (kg/m) | Error (%) | |
| 2.097 | 2.528 | 17.05 | 2.168 | 2.528 | 14.24 | |
| 2.395 | 2.528 | 5.26 | 2.540 | 2.528 | 0.47 | |
| 2.246 | 2.528 | 11.15 | 2.451 | 2.528 | 3.04 | |
| 2.557 | 2.528 | 1.14 | 2.477 | 2.528 | 2.02 | |
| 2.596 | 2.528 | 2.69 | 2.622 | 2.528 | 3.72 | |
| 5.582 | 5.385 | 3.66 | 2.728 | 2.528 | 7.91 | |
| 2.588 | 2.528 | 2.37 | 2.562 | 2.528 | 1.34 | |
| 2.457 | 2.528 | 2.81 | 2.503 | 2.528 | 0.98 | |
| Type | Relative Error (RE) (%) | Correlation Coefficient (r) (%) |
|---|---|---|
| sine | 9.31 | 99.57 |
| triangular wave | 12.97 | 99.16 |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2021 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Li, H.; Jiang, J.; Mohamed, M.S. Online Dynamic Load Identification Based on Extended Kalman Filter for Structures with Varying Parameters. Symmetry 2021, 13, 1372. https://doi.org/10.3390/sym13081372
Li H, Jiang J, Mohamed MS. Online Dynamic Load Identification Based on Extended Kalman Filter for Structures with Varying Parameters. Symmetry. 2021; 13(8):1372. https://doi.org/10.3390/sym13081372
Chicago/Turabian StyleLi, Hongqiu, Jinhui Jiang, and M Shadi Mohamed. 2021. "Online Dynamic Load Identification Based on Extended Kalman Filter for Structures with Varying Parameters" Symmetry 13, no. 8: 1372. https://doi.org/10.3390/sym13081372
APA StyleLi, H., Jiang, J., & Mohamed, M. S. (2021). Online Dynamic Load Identification Based on Extended Kalman Filter for Structures with Varying Parameters. Symmetry, 13(8), 1372. https://doi.org/10.3390/sym13081372