
Robust Adaptive Estimation of Graph Signals Based on Welsch Loss

Abstract
:1. Introduction
1.1. Background and Motivation
1.2. Our Contributions
- We proposed a novel cost function on graph to deal with the impulsive noise environment.
- The detail analysis of the proposed algorithm is provided.
- The partial sampling strategy is proposed for WL-G algorithm.
- WL-G estimation with adaptive graph sampling is also considered to deal with the time-variant graphs.
2. Related Work
2.1. Graph Sampling without Adaptive Strategy
2.2. Graph Sampling with Adaptive Strategy
3. Background of Graph Signal Processing
4. Adaptive WL-G Estimation on Graphs
Computational Complexity
5. Mean Square Analysis
6. Sampling Strategy
7. Wl-G Estimation with AGS
8. Simulation
8.1. On the Theoretical Results
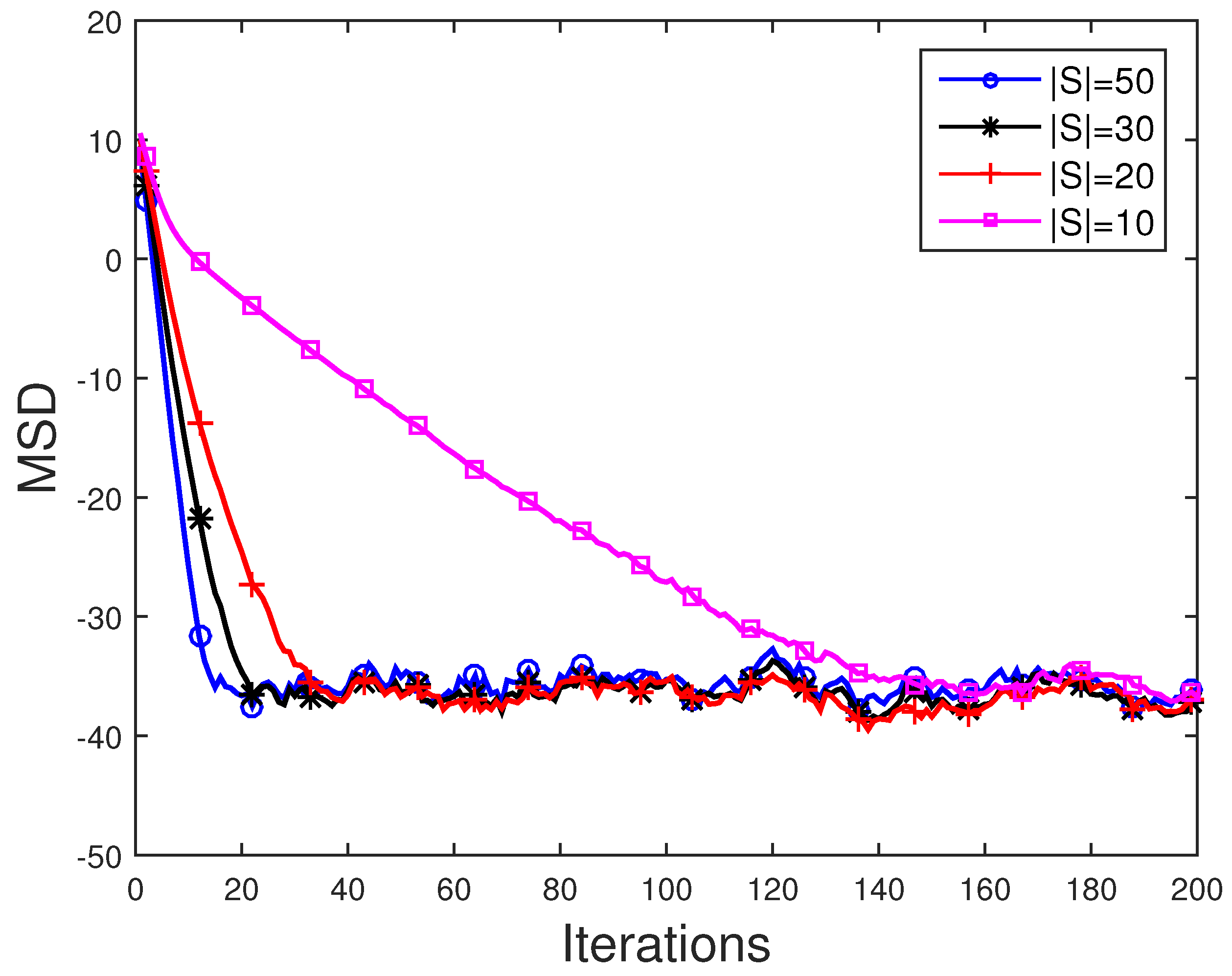
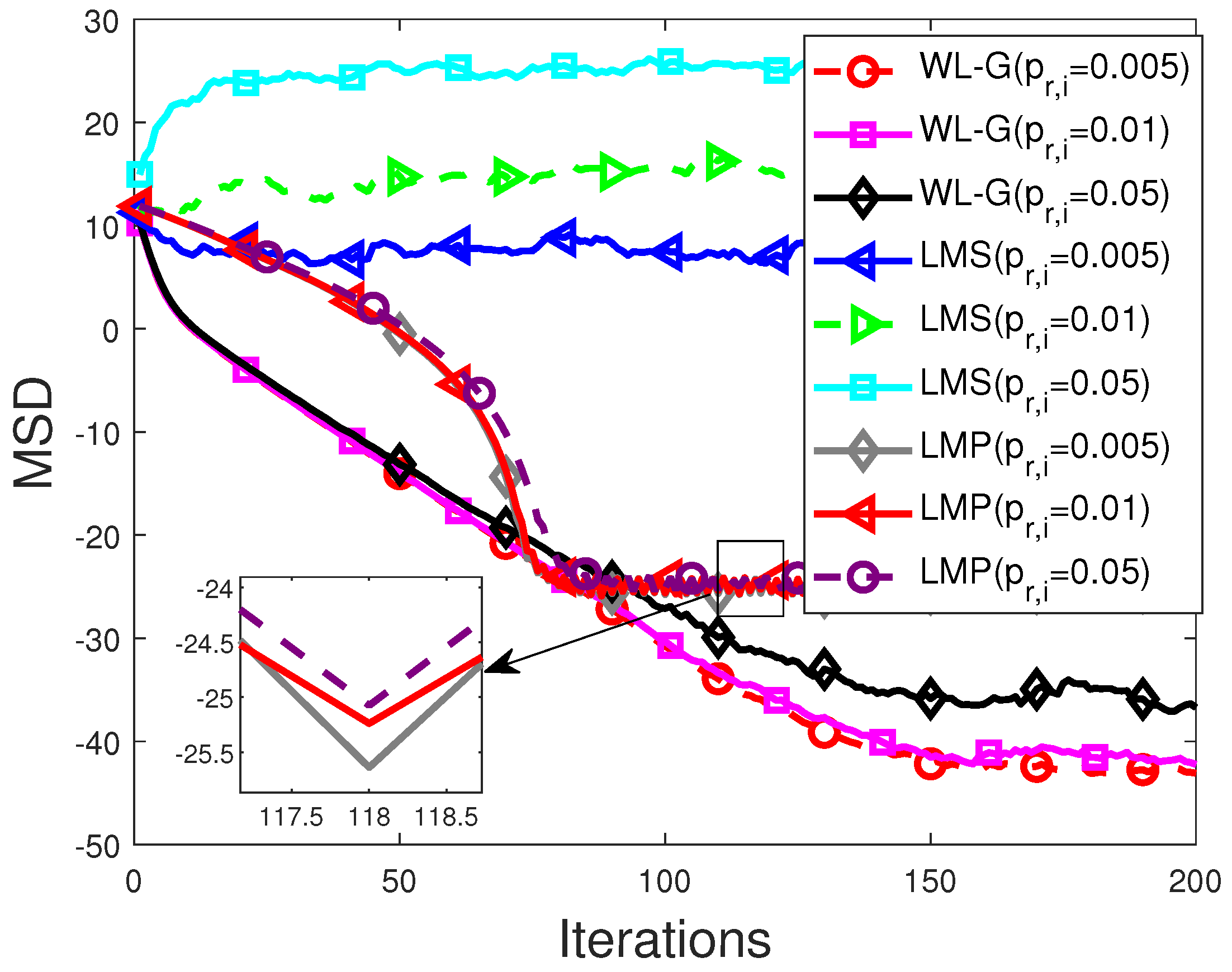
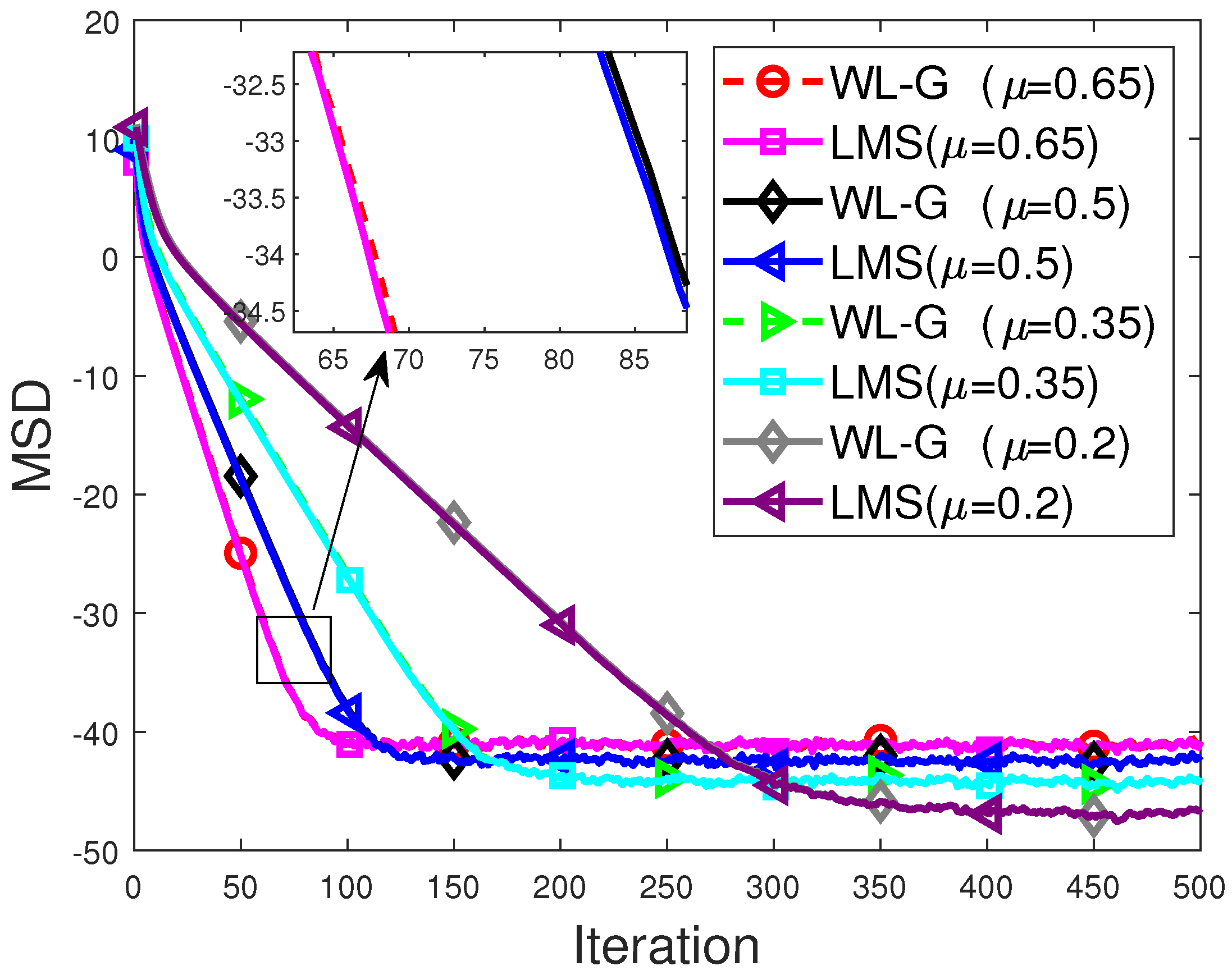
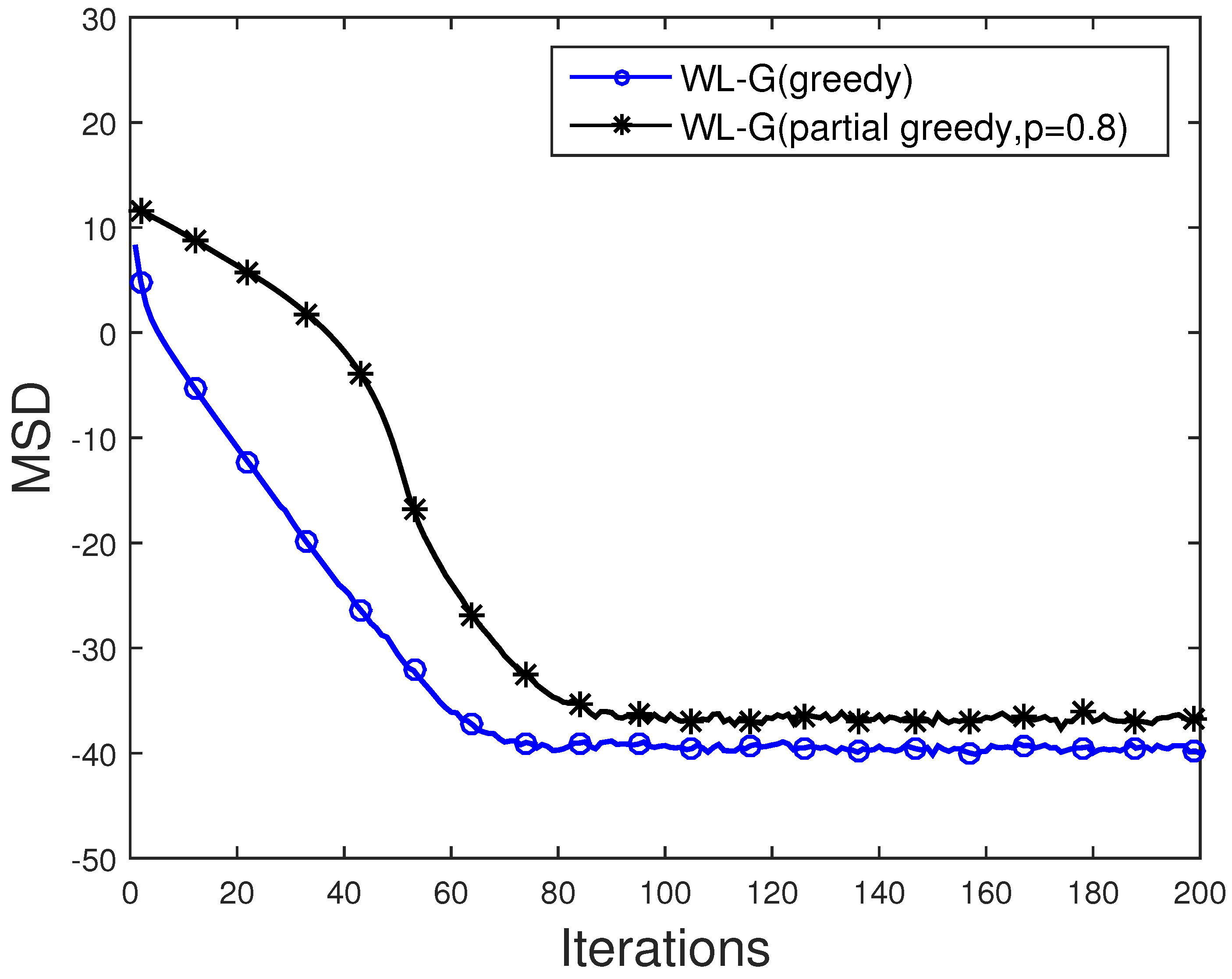
8.2. On the Performance of The WL-G Algorithm
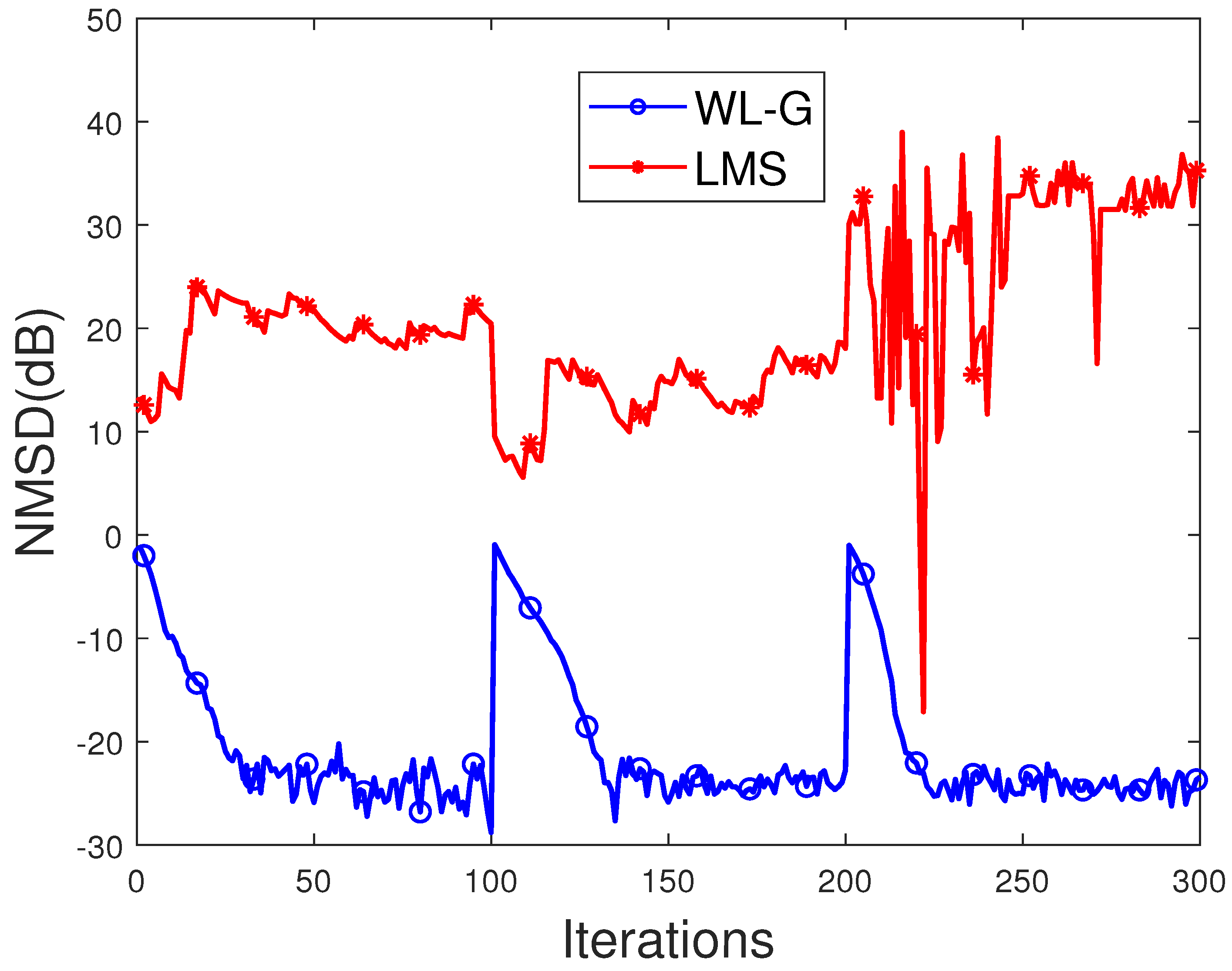
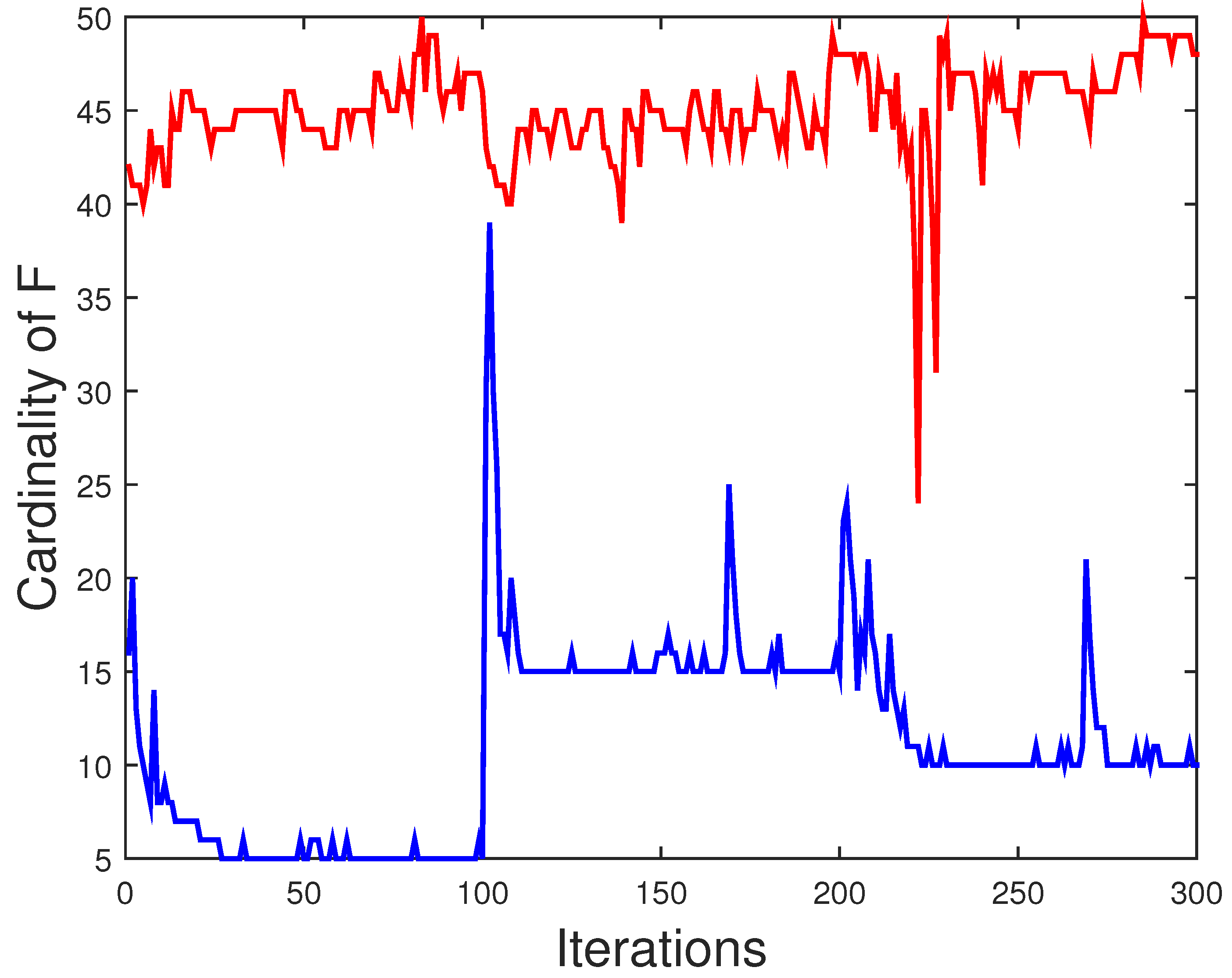
8.3. On the Performance of WL-G Algorithm with Adaptive Graph Sampling
9. Discussion
9.1. Discussion about Adaptive WL-G Estimation on Graphs
9.1.1. Discussion about WL-G Estimation with AGS
9.1.2. Discussion about Simulation Results
10. Conclusions
Author Contributions
Funding
Data Availability Statement
Conflicts of Interest
Appendix A. Proof of the Lemma 1
Appendix B. Proof of the Lemma 2
References
- Yang, G.; Yang, L.; Yang, Z.; Huang, C. Efficient Node Selection Strategy for Sampling Bandlimited Signals on Graphs. IEEE Trans. Signal Process. 2021, 69, 5815–5829. [Google Scholar] [CrossRef]
- Tanaka, Y.; Eldar, Y.C. Generalized Sampling on Graphs With Subspace and Smoothness Priors. IEEE Trans. Signal Process. 2020, 68, 2272–2286. [Google Scholar] [CrossRef] [Green Version]
- Ruiz, L.; Chamon, L.; Ribeiro, A.R. Graphon Signal Processing. IEEE Trans. Signal Process. 2021, 69, 4961–4976. [Google Scholar] [CrossRef]
- Romero, D.; Mollaebrahim, S.; Beferull-Lozano, B.; Asensio-Marco, C. Fast Graph Filters for Decentralized Subspace Projection. IEEE Trans. Signal Process. 2021, 69, 150–164. [Google Scholar] [CrossRef]
- Ramakrishna, R.; Scaglione, A. Grid-Graph Signal Processing (Grid-GSP): A Graph Signal Processing Framework for the Power Grid. IEEE Trans. Signal Process. 2021, 69, 2725–2739. [Google Scholar] [CrossRef]
- Polyzos, K.D.; Lu, Q.; Giannakis, G.B. Ensemble Gaussian processes for online learning over graphs with adaptivity and scalability. IEEE Trans. Signal Process. 2021, 26, 1. [Google Scholar] [CrossRef]
- Morency, M.W.; Leus, G. Graphon Filters: Graph Signal Processing in the Limit. IEEE Trans. Signal Process. 2021, 69, 1740–1754. [Google Scholar] [CrossRef]
- Meyer, F.; Williams, J.L. Scalable Detection and Tracking of Geometric Extended Objects. IEEE Trans. Signal Process. 2021, 69, 6283–6298. [Google Scholar] [CrossRef]
- Ibrahim, S.; Fu, X. Mixed Membership Graph Clustering via Systematic Edge Query. IEEE Trans. Signal Process. 2021, 69, 5189–5205. [Google Scholar] [CrossRef]
- Sandryhaila, A.; Moura, J.M.F. Discrete signal processing on graphs. IEEE Trans. Signal Process. 2013, 61, 1644–1656. [Google Scholar] [CrossRef] [Green Version]
- Ortega, A.; Frossard, P.; Kovačević, J.; Moura, J.M.F.; Vandergheynst, P. Graph signal processing: Overview, challenges, and applications. Proc. IEEE 2018, 106, 808–828. [Google Scholar] [CrossRef] [Green Version]
- Shuman, D.I.; Narang, S.K.; Frossard, P.; Ortega, A.; Vandergheynst, P. The emerging field of signal processing on graphs: Extending high-dimensional data analysis to networks and other irregular domains. arXiv 2012, arXiv:1211.0053. [Google Scholar] [CrossRef] [Green Version]
- Wang, Y.; Sun, Y.; Liu, Z.; Sarma, S.E.; Bronstein, M.M.; Solomon, J.M. Dynamic graph cnn for learning on point clouds. arXiv 2018, arXiv:1801.07829. [Google Scholar] [CrossRef] [Green Version]
- Rustamov, R.; Guibas, L.J. Wavelets on graphs via deep learning. Adv. Neural Inf. Process. Syst. 2013, 26, 998–1006. [Google Scholar]
- Mao, X.; Qiu, K.; Li, T.; Gu, Y. Spatio-temporal signal recovery based on low rank and differential smoothness. IEEE Trans. Signal Process. 2018, 66, 6281–6296. [Google Scholar] [CrossRef]
- Mao, X.; Gu, Y.; Yin, W. Walk Proximal Gradient: An Energy-Efficient Algorithm for Consensus Optimization. IEEE Internet Things J. 2018, 6, 2048–2060. [Google Scholar] [CrossRef]
- Mao, X.; Yuan, K.; Hu, Y.; Gu, Y.; Sayed, A.H.; Yin, W. Walkman: A communication-efficient random-walk algorithm for decentralized optimization. IEEE Trans. Signal Process. 2020, 68, 2513–2528. [Google Scholar] [CrossRef]
- Qiu, K.; Mao, X.; Shen, X.; Wang, X.; Li, T.; Gu, Y. Time-varying graph signal reconstruction. IEEE J. Sel. Top. Signal Process. 2017, 11, 870–883. [Google Scholar] [CrossRef]
- Marques, A.G.; Segarra, S.; Leus, G.; Ribeiro, A. Sampling of Graph Signals With Successive Local Aggregations. IEEE Trans. Signal Process. 2016, 64, 1832–1843. [Google Scholar] [CrossRef]
- Sandryhaila, A.; Moura, J.M. Discrete signal processing on graphs: Frequency analysis. IEEE Trans. Signal Process. 2014, 62, 3042–3054. [Google Scholar] [CrossRef] [Green Version]
- Segarra, S.; Marques, A.G.; Mateos, G.; Ribeiro, A. Network topology inference from spectral templates. IEEE Trans. Signal Inf. Process. Netw. 2017, 3, 467–483. [Google Scholar] [CrossRef]
- Shahid, N.; Perraudin, N.; Kalofolias, V.; Puy, G.; Vandergheynst, P. Fast robust PCA on graphs. IEEE J. Sel. Top. Signal Process. 2016, 10, 740–756. [Google Scholar] [CrossRef] [Green Version]
- Chen, S.; Cerda, F.; Rizzo, P.; Bielak, J.; Garrett, J.H.; Kovačević, J. Semi-supervised multiresolution classification using adaptive graph filtering with application to indirect bridge structural health monitoring. IEEE Trans. Signal Process. 2014, 62, 2879–2893. [Google Scholar] [CrossRef]
- Loukas, A.; Simonetto, A.; Leus, G. Distributed autoregressive moving average graph filters. IEEE Signal Process. Lett. 2015, 22, 1931–1935. [Google Scholar] [CrossRef] [Green Version]
- Teke, O.; Vaidyanathan, P.P. Extending Classical Multirate Signal Processing Theory to Graphs-Part II: M-Channel Filter Banks. IEEE Trans. Signal Process. 2017, 65, 423–437. [Google Scholar] [CrossRef]
- Sardellitti, S.; Barbarossa, S.; Di Lorenzo, P. On the graph Fourier transform for directed graphs. IEEE J. Sel. Top. Signal Process. 2017, 11, 796–811. [Google Scholar] [CrossRef] [Green Version]
- Chamon, L.F.O.; Ribeiro, A. Greedy sampling of graph signals. IEEE Trans. Signal Process. 2018, 66, 34–47. [Google Scholar] [CrossRef]
- Chen, S.; Varma, R.; Sandryhaila, A.; Kovačević, J. Discrete Signal Processing on Graphs: Sampling Theory. IEEE Trans. Signal Process. 2015, 63, 6510–6523. [Google Scholar] [CrossRef] [Green Version]
- Pesenson, I. Sampling in Paley-Wiener spaces on combinatorial graphs. Trans. Am. Math. Soc. 2008, 360, 5603–5627. [Google Scholar] [CrossRef] [Green Version]
- Mengüç, E.C. Design of quaternion-valued second-order Volterra adaptive filters for nonlinear 3-D and 4-D signals. Signal Process. 2020, 174, 107619. [Google Scholar] [CrossRef]
- Yang, L.; Liu, J.; Zhang, Q.; Yan, R.; Chen, X. Frequency domain spline adaptive filters. Signal Process. 2020, 177, 107752. [Google Scholar] [CrossRef]
- Zhou, S.; Zhao, H. Statistics variable kernel width for maximum correntropy criterion algorithm. Signal Process. 2020, 176, 107589. [Google Scholar] [CrossRef]
- Shen, M.; Xiong, K.; Wang, S. Multikernel adaptive filtering based on random features approximation. Signal Process. 2020, 176, 107712. [Google Scholar] [CrossRef]
- Wang, W.; Zhao, H. A novel block-sparse proportionate NLMS algorithm based on the l2,0 norm. Signal Process. 2020, 176, 107671. [Google Scholar] [CrossRef]
- Nguyen, N.H.; Doğançay, K.; Wang, W. Adaptive estimation and sparse sampling for graph signals in alpha-stable noise. Digit. Signal Process. 2020, 105, 102782. [Google Scholar] [CrossRef]
- Di Lorenzo, P.; Banelli, P.; Barbarossa, S.; Sardellitti, S. Distributed adaptive learning of signals defined over graphs. In Proceedings of the 2016 50th Asilomar Conference on Signals, Systems and Computers, Pacific Grove, CA, USA, 6–9 November 2016; pp. 527–531. [Google Scholar]
- Sayed, A.H. Adaptive Filters; John Wiley & Sons: Hoboken, NJ, USA, 2011. [Google Scholar]
- Al-Sayed, S.; Zoubir, A.M.; Sayed, A.H. Robust adaptation in impulsive noise. IEEE Trans. Signal Process. 2016, 64, 2851–2865. [Google Scholar] [CrossRef]
- Al-Sayed, S.; Zoubir, A.M.; Sayed, A.H. Robust distributed estimation by networked agents. IEEE Trans. Signal Process. 2017, 65, 3909–3921. [Google Scholar] [CrossRef]
- Nguyen, N.H.; Doğançay, K. Improved Weighted Instrumental Variable Estimator for Doppler-Bearing Source Localization in Heavy Noise. In Proceedings of the 2018 IEEE International Conference on Acoustics, Speech and Signal Processing (ICASSP), Calgary, AB, Canada, 15–20 April 2018; pp. 3529–3533. [Google Scholar]
- Georgiou, P.G.; Tsakalides, P.; Kyriakakis, C. Alpha-stable modeling of noise and robust time-delay estimation in the presence of impulsive noise. IEEE Trans. Multimed. 1999, 1, 291–301. [Google Scholar] [CrossRef] [Green Version]
- Pascal, F.; Forster, P.; Ovarlez, J.P.; Larzabal, P. Performance analysis of covariance matrix estimates in impulsive noise. IEEE Trans. Signal Process. 2008, 56, 2206–2217. [Google Scholar] [CrossRef] [Green Version]
- Wang, W.; Zhao, H.; Doğançay, K.; Yu, Y.; Lu, L.; Zheng, Z. Robust adaptive filtering algorithm based on maximum correntropy criteria for censored regression. Signal Process. 2019, 160, 88–98. [Google Scholar] [CrossRef]
- Liu, W.; Pokharel, P.P.; Príncipe, J.C. Correntropy: Properties and applications in non-Gaussian signal processing. IEEE Trans. Signal Process. 2007, 55, 5286–5298. [Google Scholar] [CrossRef]
- Chen, B.; Xing, L.; Zhao, H.; Zheng, N.; Prı, J.C. Generalized correntropy for robust adaptive filtering. IEEE Trans. Signal Process. 2016, 64, 3376–3387. [Google Scholar] [CrossRef] [Green Version]
- Shin, J.; Yoo, J.; Park, P. Variable step-size sign subband adaptive filter. IEEE Signal Process. Lett. 2013, 20, 173–176. [Google Scholar] [CrossRef]
- Zou, Y.; Chan, S.C.; Ng, T.S. Least mean M-estimate algorithms for robust adaptive filtering in impulse noise. IEEE Trans. Circuits Syst. II Analog Digit. Signal Process. 2000, 47, 1564–1569. [Google Scholar]
- Chan, S.C.; Zou, Y.X. A recursive least M-estimate algorithm for robust adaptive filtering in impulsive noise: Fast algorithm and convergence performance analysis. IEEE Trans. Signal Process. 2004, 52, 975–991. [Google Scholar] [CrossRef]
- Jung, S.M.; Park, P. Normalised least-mean-square algorithm for adaptive filtering of impulsive measurement noises and noisy inputs. Electron. Lett. 2013, 49, 1270–1272. [Google Scholar] [CrossRef]
- Chan, S.C.; Wen, Y.; Ho, K.L. A robust past algorithm for subspace tracking in impulsive noise. IEEE Trans. Signal Process. 2006, 54, 105–116. [Google Scholar] [CrossRef] [Green Version]
- Nguyen, N.H.; Dogancay, K. An Iteratively Reweighted Instrumental-Variable Estimator for Robust 3D AOA Localization in Impulsive Noise. IEEE Trans. Signal Process. 2019, 67, 4795–4808. [Google Scholar] [CrossRef]
- Chen, B.; Xing, L.; Liang, J.; Zheng, N.; Príncipe, J.C. Steady-State Mean-Square Error Analysis for Adaptive Filtering under the Maximum Correntropy Criterion. IEEE Signal Process. Lett. 2014, 21, 880–884. [Google Scholar] [CrossRef]
- Singh, A.; Principe, J.C. Using correntropy as a cost function in linear adaptive filters. In Proceedings of the 2009 International Joint Conference on Neural Networks, Atlanta, GA, USA, 14–19 June 2009; pp. 2950–2955. [Google Scholar]
- Chen, B.; Liu, X.; Zhao, H.; Principe, J.C. Maximum correntropy Kalman filter. Automatica 2017, 76, 70–77. [Google Scholar] [CrossRef] [Green Version]
- Giannakis, G.B.; Kekatos, V.; Gatsis, N.; Kim, S.J.; Zhu, H.; Wollenberg, B.F. Monitoring and optimization for power grids: A signal processing perspective. IEEE Signal Process. Mag. 2013, 30, 107–128. [Google Scholar] [CrossRef] [Green Version]
- Drayer, E.; Routtenberg, T. Detection of false data injection attacks in smart grids based on graph signal processing. IEEE Syst. J. 2019, 14, 1886–1896. [Google Scholar] [CrossRef] [Green Version]
- Drayer, E.; Routtenberg, T. Detection of false data injection attacks in power systems with graph fourier transform. In Proceedings of the 2018 IEEE Global Conference on Signal and Information Processing (GlobalSIP), Anaheim, CA, USA, 26–28 November 2018; pp. 890–894. [Google Scholar]
- Grotas, S.; Yakoby, Y.; Gera, I.; Routtenberg, T. Power Systems Topology and State Estimation by Graph Blind Source Separation. IEEE Trans. Signal Process. 2019, 67, 2036–2051. [Google Scholar] [CrossRef] [Green Version]
- Singer, A.; Shkolnisky, Y. Three-dimensional structure determination from common lines in cryo-EM by eigenvectors and semidefinite programming. SIAM J. Imaging Sci. 2011, 4, 543–572. [Google Scholar] [CrossRef] [PubMed]
- Giridhar, A.; Kumar, P.R. Distributed clock synchronization over wireless networks: Algorithms and analysis. In Proceedings of the 45th IEEE Conference on Decision and Control, San Diego, CA, USA, 13–15 December 2006; pp. 4915–4920. [Google Scholar]
- Dennis, J.E., Jr.; Welsch, R.E. Techniques for nonlinear least squares and robust regression. Commun. Stat.-Simul. Comput. 1978, 7, 345–359. [Google Scholar] [CrossRef]
- Haykin, S.S. Adaptive Filter Theory; Pearson Education: Chennai, India, 2005. [Google Scholar]
- Wang, X.; Liu, P.; Gu, Y. Local-set-based graph signal reconstruction. IEEE Trans. Signal Process. 2015, 63, 2432–2444. [Google Scholar] [CrossRef]
- Chen, S.; Varma, R.; Singh, A.; Kovačević, J. Signal recovery on graphs: Fundamental limits of sampling strategies. IEEE Trans. Signal Inf. Process. Netw. 2016, 2, 539–554. [Google Scholar] [CrossRef] [Green Version]
- Tsitsvero, M.; Barbarossa, S.; Di Lorenzo, P. Signals on graphs: Uncertainty principle and sampling. IEEE Trans. Signal Process. 2016, 64, 4845–4860. [Google Scholar] [CrossRef] [Green Version]
- Anis, A.; Gadde, A.; Ortega, A. Towards a sampling theorem for signals on arbitrary graphs. In Proceedings of the 2014 IEEE International Conference on Acoustics, Speech and Signal Processing (ICASSP), Florence, Italy, 4–9 May 2014; pp. 3864–3868. [Google Scholar]
- Tanaka, Y. Spectral domain sampling of graph signals. IEEE Trans. Signal Process. 2018, 66, 3752–3767. [Google Scholar] [CrossRef] [Green Version]
- Shin, J.; Kim, J.; Kim, T.K.; Yoo, J. p-Norm-like Affine Projection Sign Algorithm for Sparse System to Ensure Robustness against Impulsive Noise. Symmetry 2021, 13, 1916. [Google Scholar] [CrossRef]
- Dogariu, L.M.; Stanciu, C.L.; Elisei-Iliescu, C.; Paleologu, C.; Benesty, J.; Ciochină, S. Tensor-Based Adaptive Filtering Algorithms. Symmetry 2021, 13, 481. [Google Scholar] [CrossRef]
- Li, G.; Zhang, H.; Zhao, J. Modified Combined-Step-Size Affine Projection Sign Algorithms for Robust Adaptive Filtering in Impulsive Interference Environments. Symmetry 2020, 12, 385. [Google Scholar] [CrossRef] [Green Version]
- Guo, Y.; Li, J.; Li, Y. Diffusion Correntropy Subband Adaptive Filtering (SAF) Algorithm over Distributed Smart Dust Networks. Symmetry 2019, 11, 1335. [Google Scholar] [CrossRef] [Green Version]
- Di Lorenzo, P.; Barbarossa, S.; Banelli, P.; Sardellitti, S. Adaptive least mean squares estimation of graph signals. IEEE Trans. Signal Inf. Process. Netw. 2016, 2, 555–568. [Google Scholar] [CrossRef] [Green Version]
- Di Lorenzo, P.; Ceci, E. Online Recovery of Time-varying Signals Defined over Dynamic Graphs. In Proceedings of the 2018 26th European Signal Processing Conference (EUSIPCO), Rome, Italy, 3–7 September 2018; pp. 131–135. [Google Scholar]
- Di Lorenzo, P.; Banelli, P.; Barbarossa, S.; Sardellitti, S. Distributed adaptive learning of graph signals. IEEE Trans. Signal Process. 2017, 65, 4193–4208. [Google Scholar] [CrossRef] [Green Version]
- Di Lorenzo, P.; Isufi, E.; Banelli, P.; Barbarossa, S.; Leus, G. Distributed recursive least squares strategies for adaptive reconstruction of graph signals. In Proceedings of the 2017 25th European Signal Processing Conference (EUSIPCO), Kos Island, Greece, 28 August–2 September 2017; pp. 2289–2293. [Google Scholar]
- Di Lorenzo, P.; Banelli, P.; Isufi, E.; Barbarossa, S.; Leus, G. Adaptive graph signal processing: Algorithms and optimal sampling strategies. IEEE Trans. Signal Process. 2018, 66, 3584–3598. [Google Scholar] [CrossRef] [Green Version]
- Ahmadi, M.J.; Arablouei, R.; Abdolee, R. Efficient Estimation of Graph Signals With Adaptive Sampling. IEEE Trans. Signal Process. 2020, 68, 3808–3823. [Google Scholar] [CrossRef]
- Shao, T.; Zheng, Y.R.; Benesty, J. An affine projection sign algorithm robust against impulsive interferences. IEEE Signal Process. Lett. 2010, 17, 327–330. [Google Scholar] [CrossRef]
- Yoo, J.; Shin, J.; Park, P. A band-dependent variable step-size sign subband adaptive filter. Signal Process. 2014, 104, 407–411. [Google Scholar] [CrossRef]
- Dogancay, K. Partial-Update Adaptive Signal Processing: Design Analysis and Implementation; Academic Press: Orlando, FL, USA, 2008. [Google Scholar]
- Arablouei, R.; Werner, S.; Huang, Y.F.; Doğançay, K. Distributed least mean-square estimation with partial diffusion. IEEE Trans. Signal Process. 2014, 62, 472–484. [Google Scholar] [CrossRef]
- Beck, A.; Teboulle, M. A fast iterative shrinkage-thresholding algorithm for linear inverse problems. SIAM J. Imaging Sci. 2009, 2, 183–202. [Google Scholar] [CrossRef] [Green Version]



















{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| The Literature | Algorithm |
|---|---|
| [72] | LMS on graph |
| [74] | Distributed LMS on graph |
| [75] | RLS on graph |
| [76] | probabilistic LMS and RLS on graph |
| [77] | ELMS and FELMS on graph |
| Algorithm | Multiplications | Additions | p-Norm | Exponent |
|---|---|---|---|---|
| LMS on graph | - | - | ||
| LMP on graph | N | - | ||
| WL-G | - | N |
| Inputdata:M |
| Outputdata: |
| Initialization: |
| Function: |
| while |
| end |
| Inputdata:M |
| Outputdata: |
| Initialization: |
| Function: |
| for |
| end |
| Problem: Recovering the band-limited graph signal from partial observations with impulsive noise. |
| Inputdata:M, , |
| Outputdata: |
| Initialization:, |
| Function: |
| while |
| end |
| Using to calculate |
| while |
| end |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2022 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Wang, W.; Sun, Q. Robust Adaptive Estimation of Graph Signals Based on Welsch Loss. Symmetry 2022, 14, 426. https://doi.org/10.3390/sym14020426
Wang W, Sun Q. Robust Adaptive Estimation of Graph Signals Based on Welsch Loss. Symmetry. 2022; 14(2):426. https://doi.org/10.3390/sym14020426
Chicago/Turabian StyleWang, Wenyuan, and Qiang Sun. 2022. "Robust Adaptive Estimation of Graph Signals Based on Welsch Loss" Symmetry 14, no. 2: 426. https://doi.org/10.3390/sym14020426
APA StyleWang, W., & Sun, Q. (2022). Robust Adaptive Estimation of Graph Signals Based on Welsch Loss. Symmetry, 14(2), 426. https://doi.org/10.3390/sym14020426