
System Resilience Evaluation and Optimization Considering Epistemic Uncertainty


Abstract
:1. Introduction
- A new uncertainty theory-based resilience measure is proposed to quantify the epistemic uncertainty in resilience evaluation. Compared with other methods, our new resilience measure has a solid mathematical foundation in epistemic quantification;
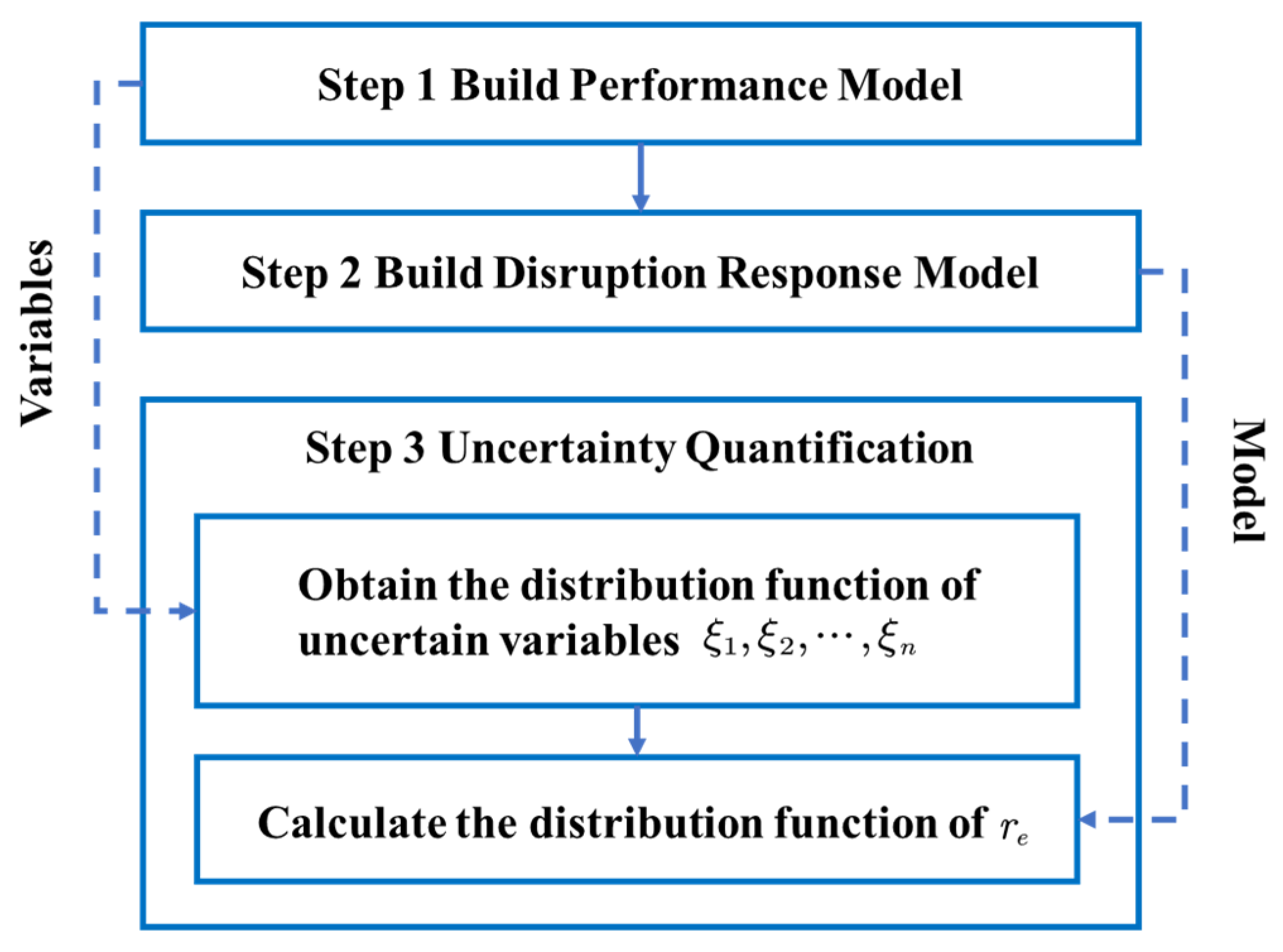
- A resilience evaluation framework is provided for the new resilience measure. By building the performance model and the disruption response model, and obtaining the distribution function of uncertain variables, the distribution function of the disruption response can be calculated, and the system resilience can be evaluated;
- To build a resilient system with a minimum budget, an uncertain programming model is given and a genetic algorithm is applied to solve the optimization problem. A road network case verifies the effectiveness of our new model and algorithm.
2. Basic Concepts and Theories
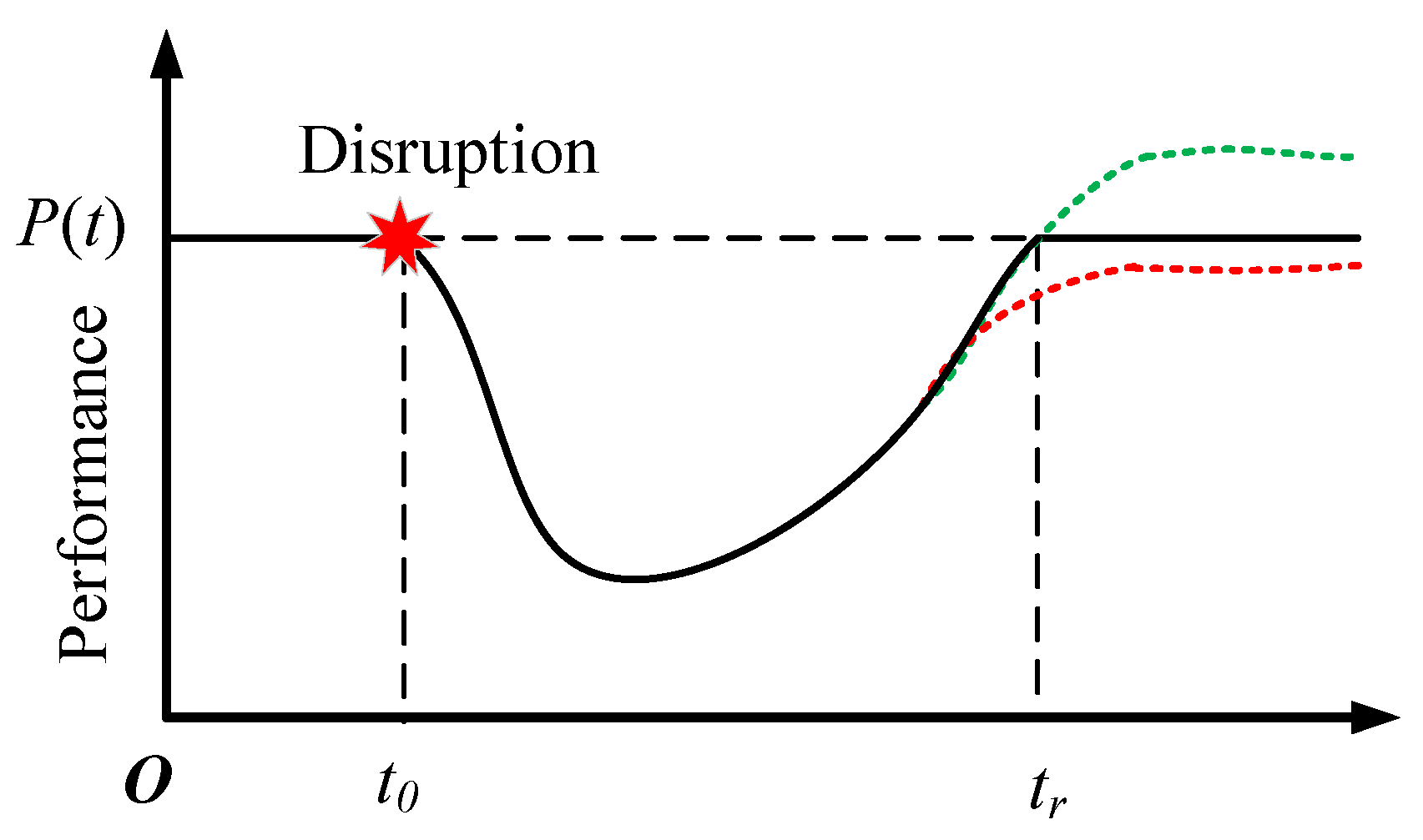
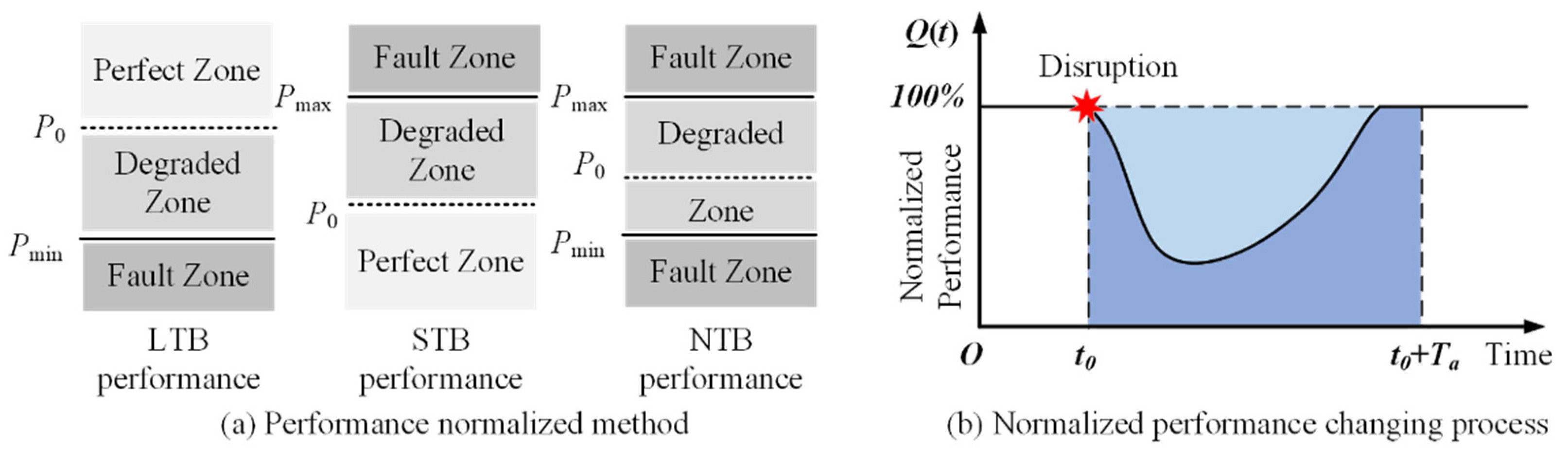
2.1. System Response after Disruptions
2.2. Uncertainty Theory
3. Uncertainty Theory-Based Resilience Measure
4. Resilience Evaluation and Optimization
4.1. Resilience Evaluation
- The distribution function of is calculated. Using the distribution function of the uncertain variables , the resilience can be evaluated using Equation (14). According to Theorem 1, the distribution function of can be calculated as follows.
4.2. Resilience Optimization
4.2.1. Optimization Model
4.2.2. Optimization Model Transformation
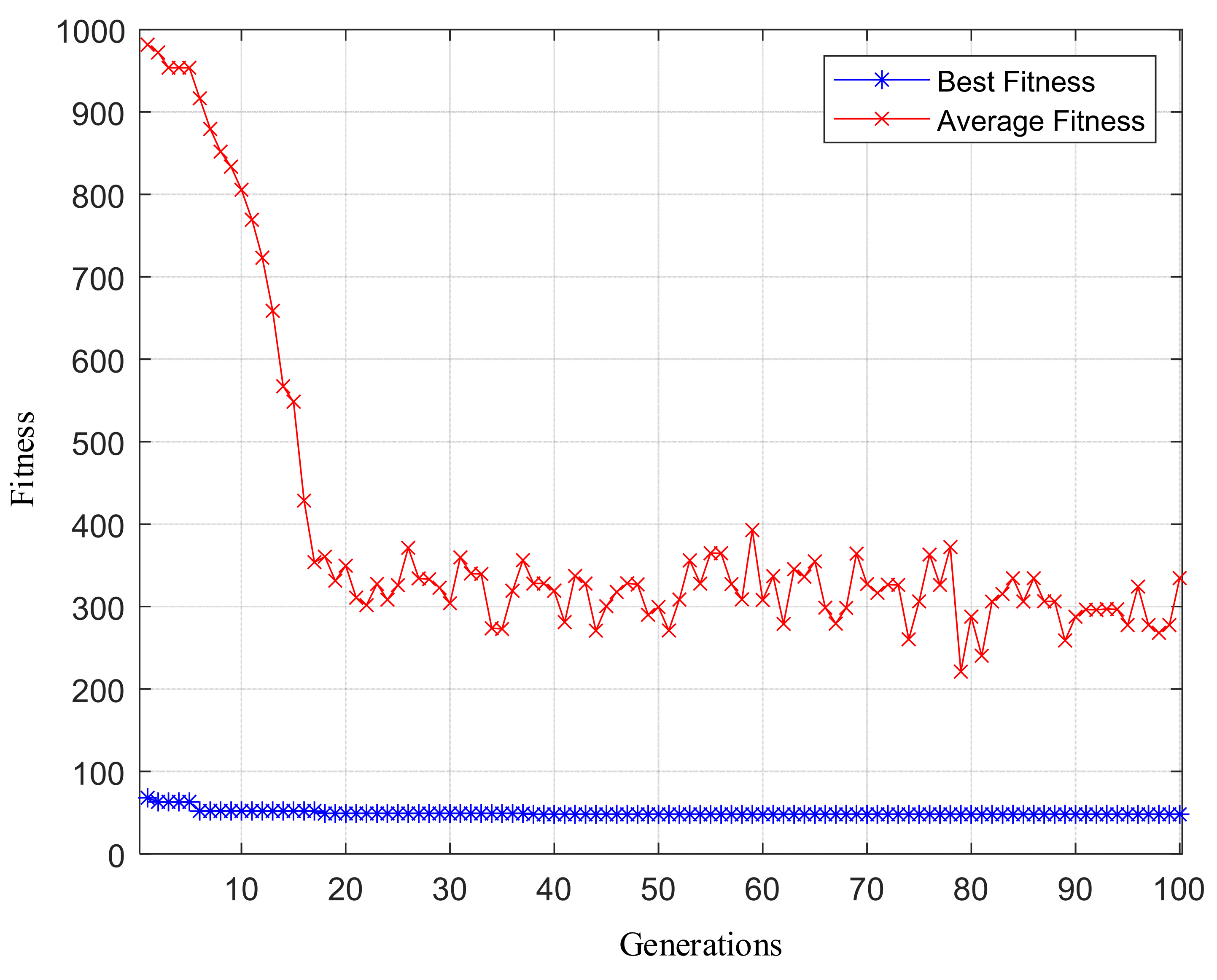
4.2.3. Optimization Method
5. Case Study
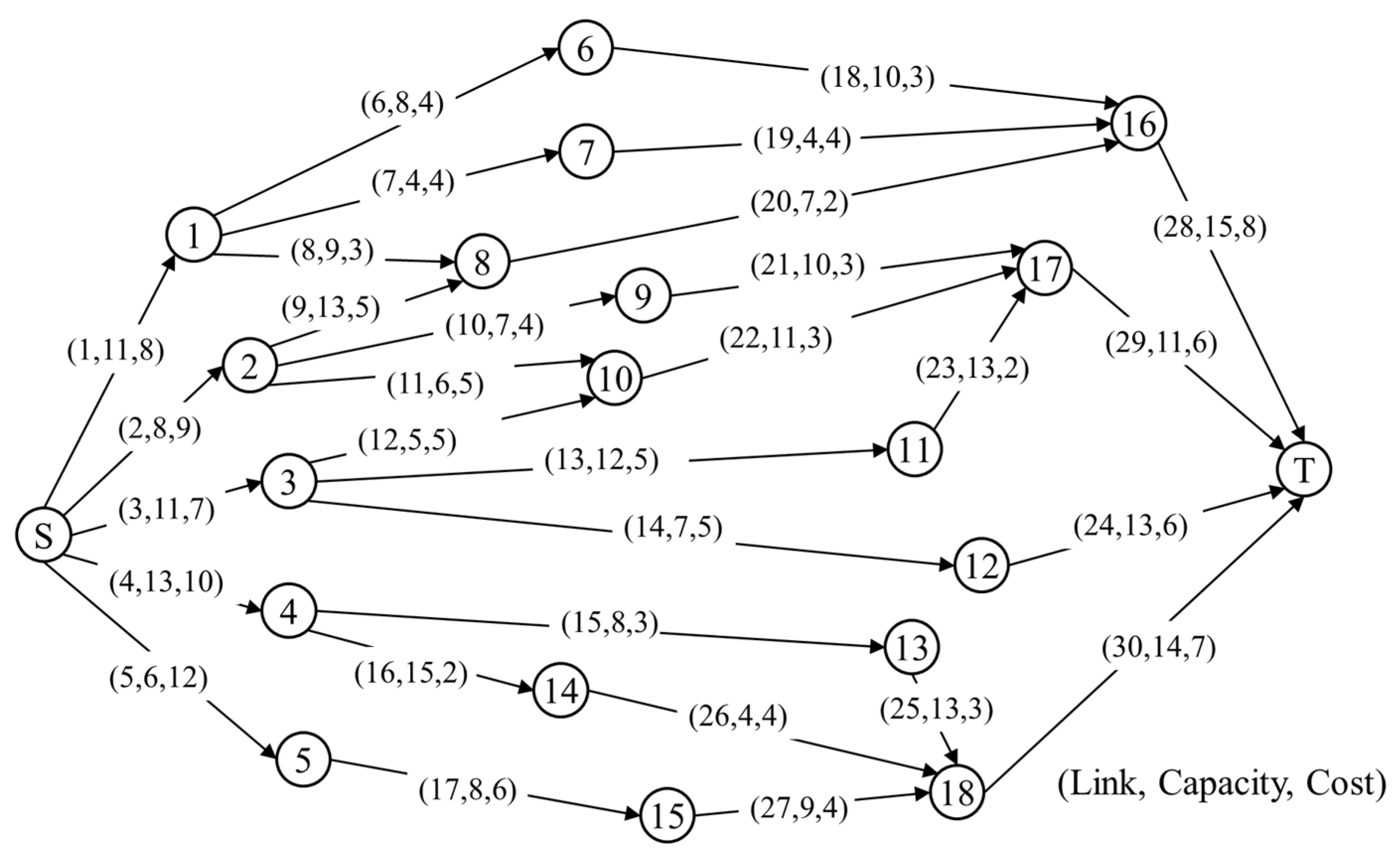
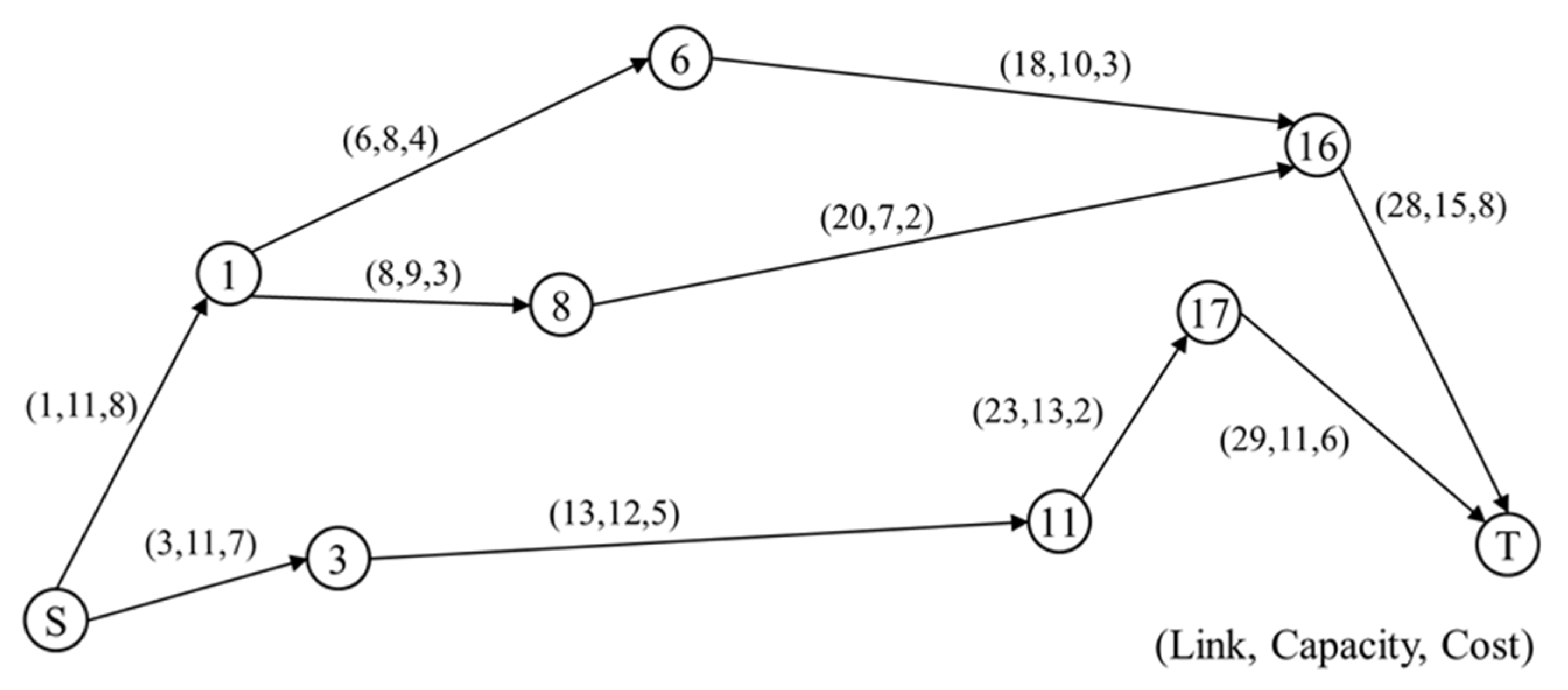
5.1. Case Introduction
- Only one link is affected during each disruption;
- The capacity of the road links degrades suddenly after disruptions, and the capacity recovery processes are linear processes. This is a widely used assumption in resilience research [53]. In most disruptions, especially natural disasters and traffic accidents, the road link capacity degradation time is very short, and the capacity degradation time can be regarded as zero;
- The uncertain variable follows a linear uncertain distribution as followswhere is the distribution function of the maximum performance degradation ;
- The uncertain variable follows a lognormal uncertain distribution as followswhere is the distribution function of the recovery time , and and are the expected value and the standard deviation of the normal uncertainty distribution, respectively.
5.2. Case 1: Road Network Resilience Evaluation
5.2.1. Resilience Evaluation
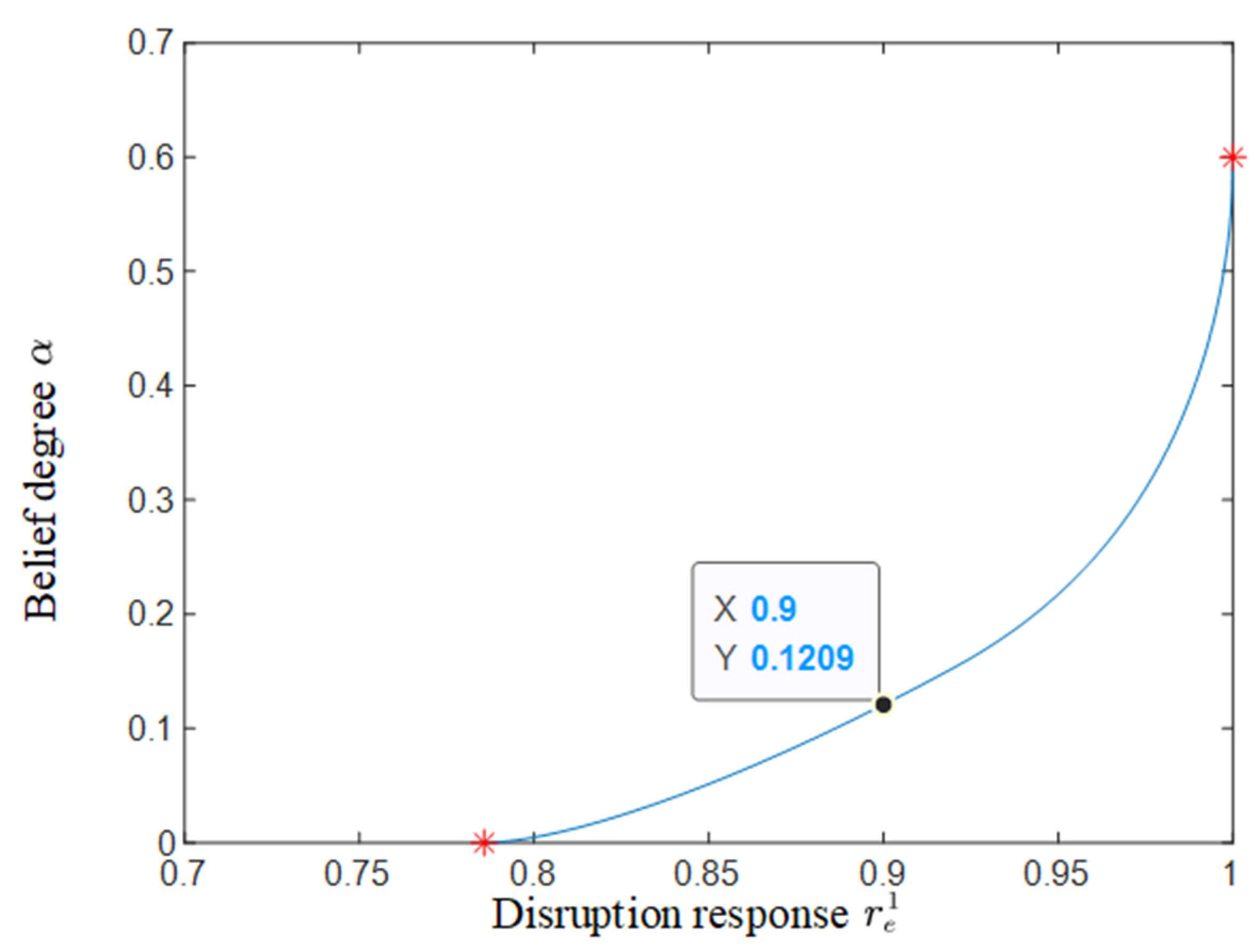
- The belief degree of the event is 0. It is obvious that the value of the network resilience is at a minimum when Link 1 is totally interrupted and cannot recover. In this situation, the maximum flow after the disruption has a constant value of 11. can also be calculated using the ratio of 11 to 14, and is equal to 0.7857;
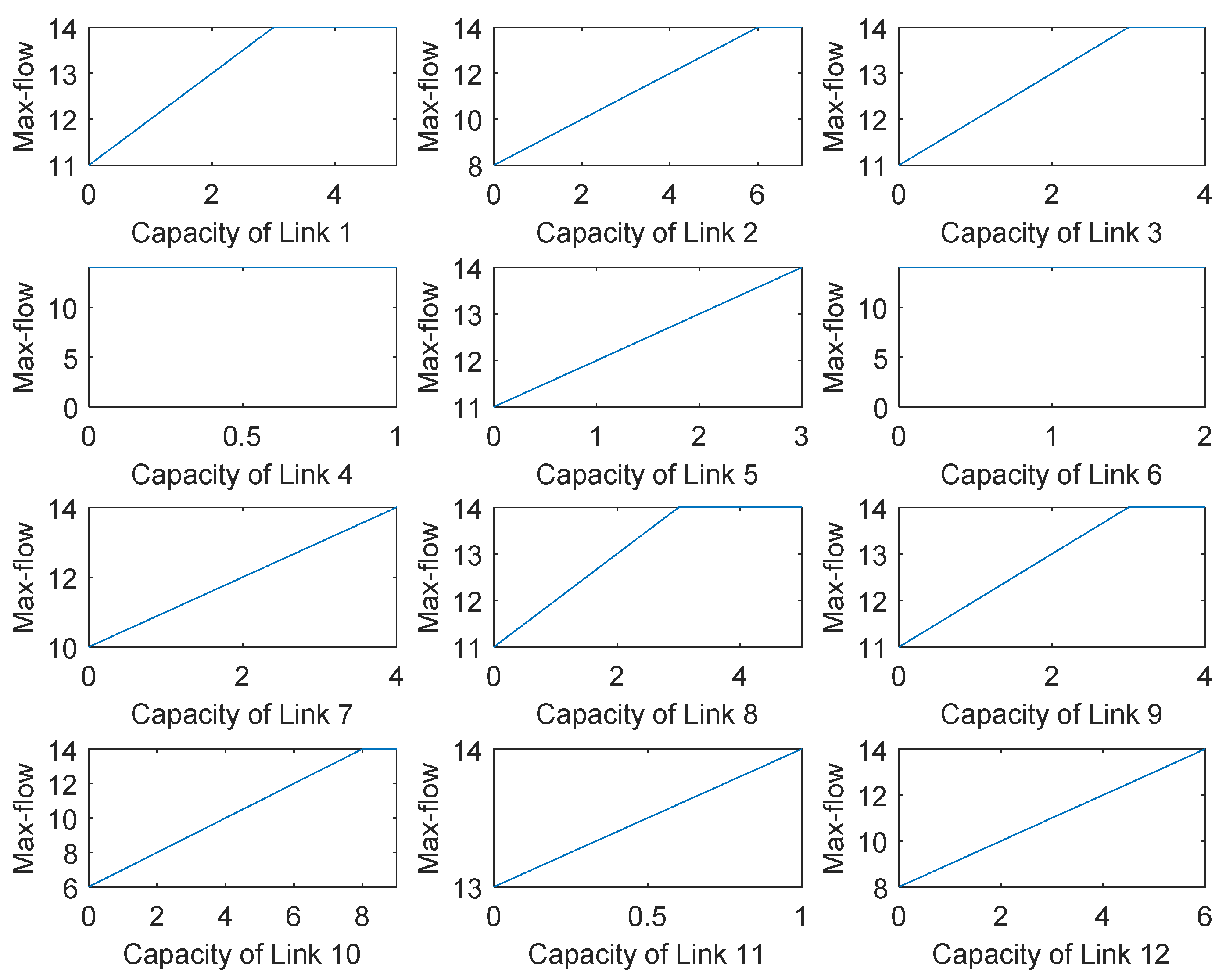
- The belief degree of the event is 0.6. According to the network structure, the maximum flow of the road network starts to decrease only when the capacity degradation of Link 1 exceeds two. According to Equation (20), the belief degree of the event is 0.6.
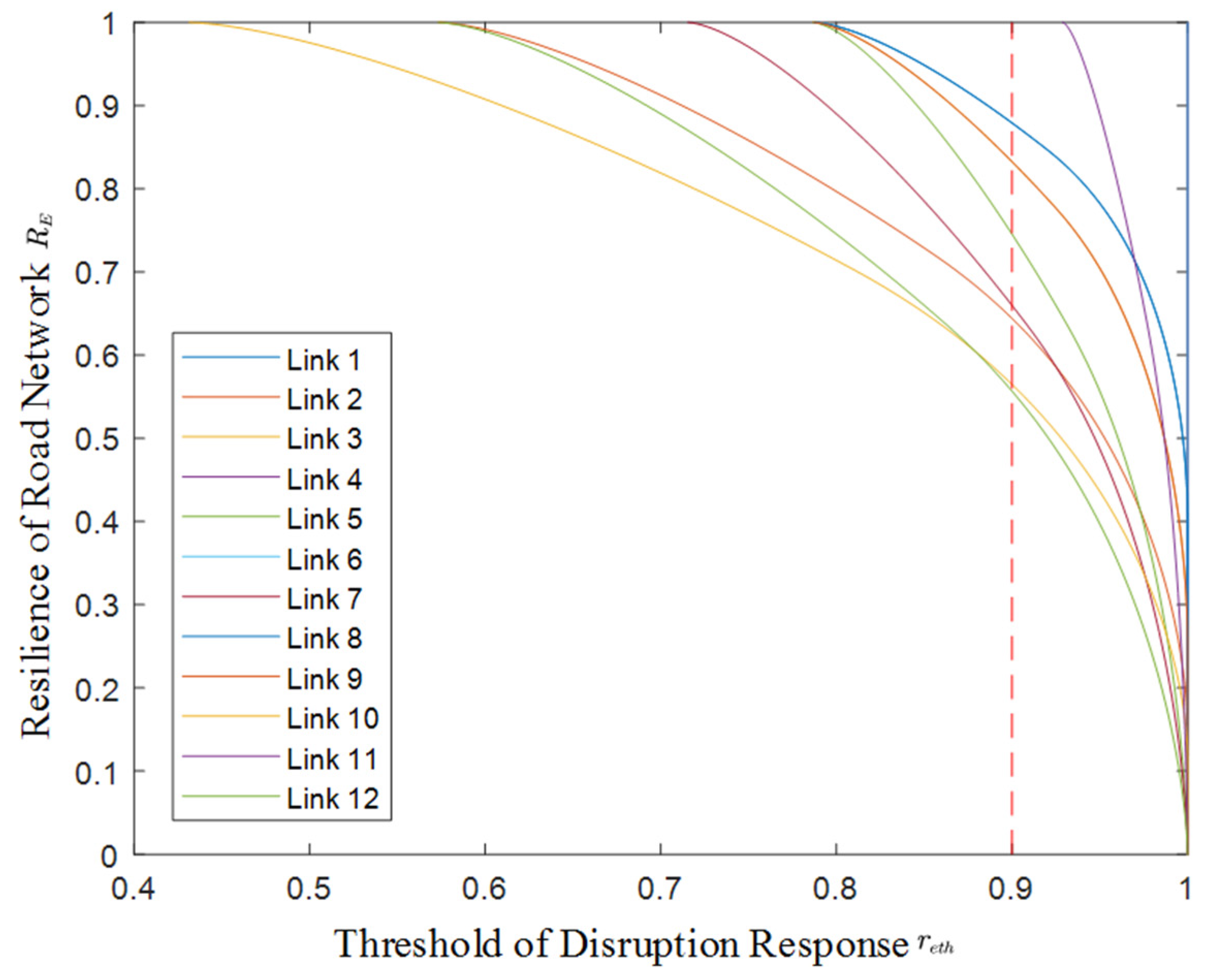
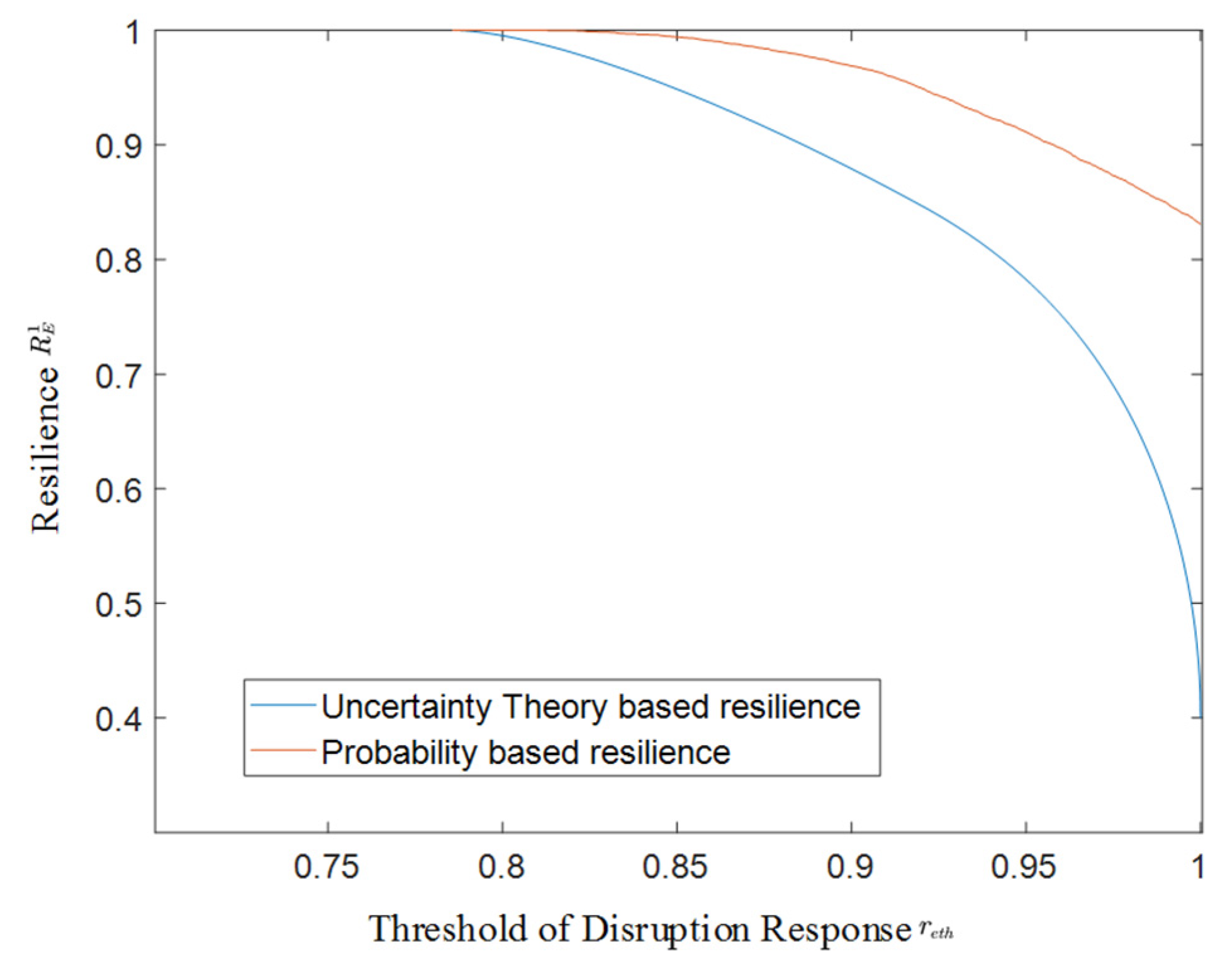
5.2.2. Results and Discussion
5.3. Case 2: Road Network Resilience Optimization
5.3.1. Network Optimization
| Algorithm 1:calculation |
| Input: The sample number N The link capacity The resilience constraint The maximum allowable recovery time Output: The disruption response Step 1 let Calculate the maximum flow when all links are in normal state. Step 2 For to , and calculate the maximum flow at time . Endfor Step 3 |
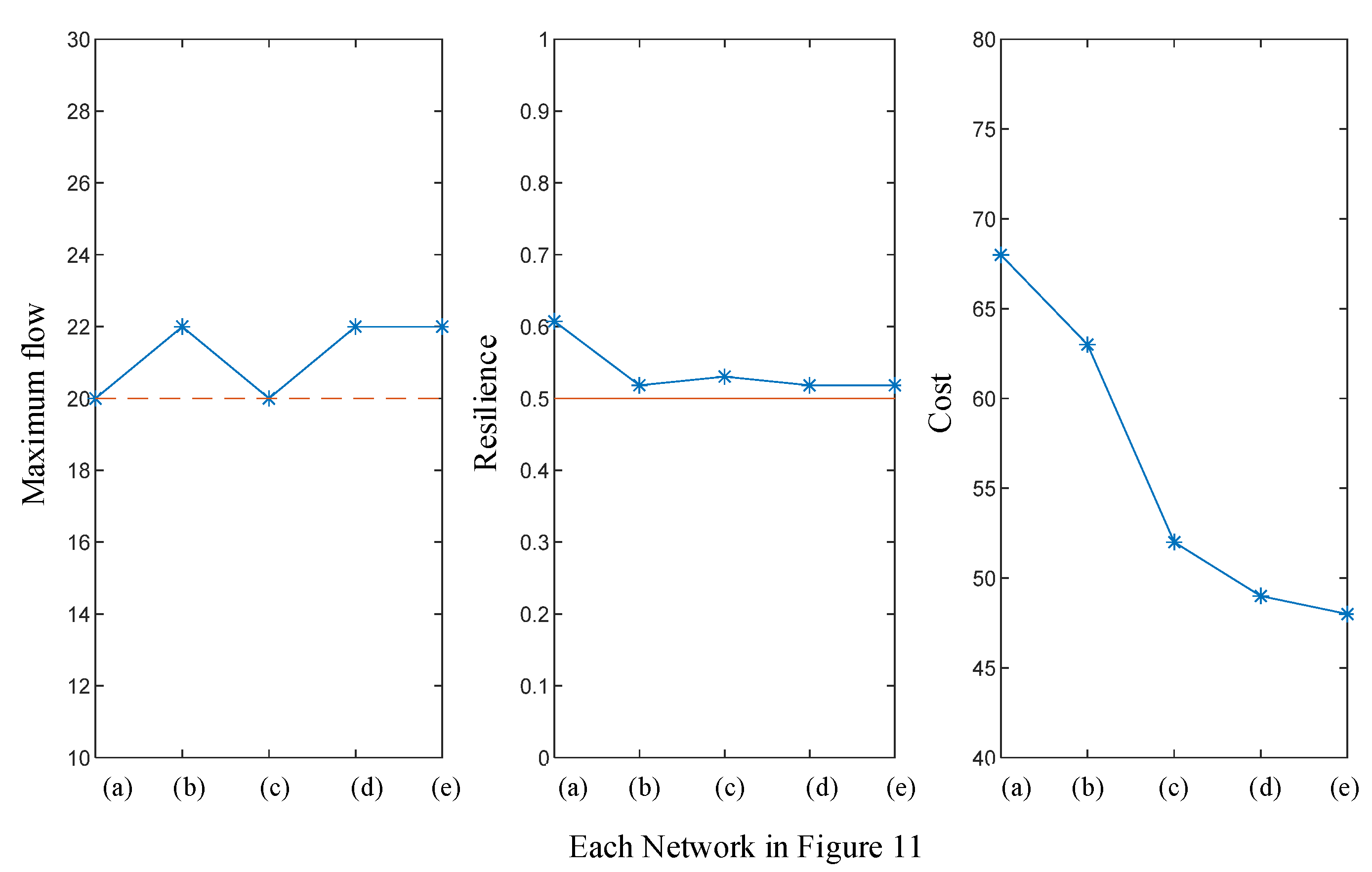
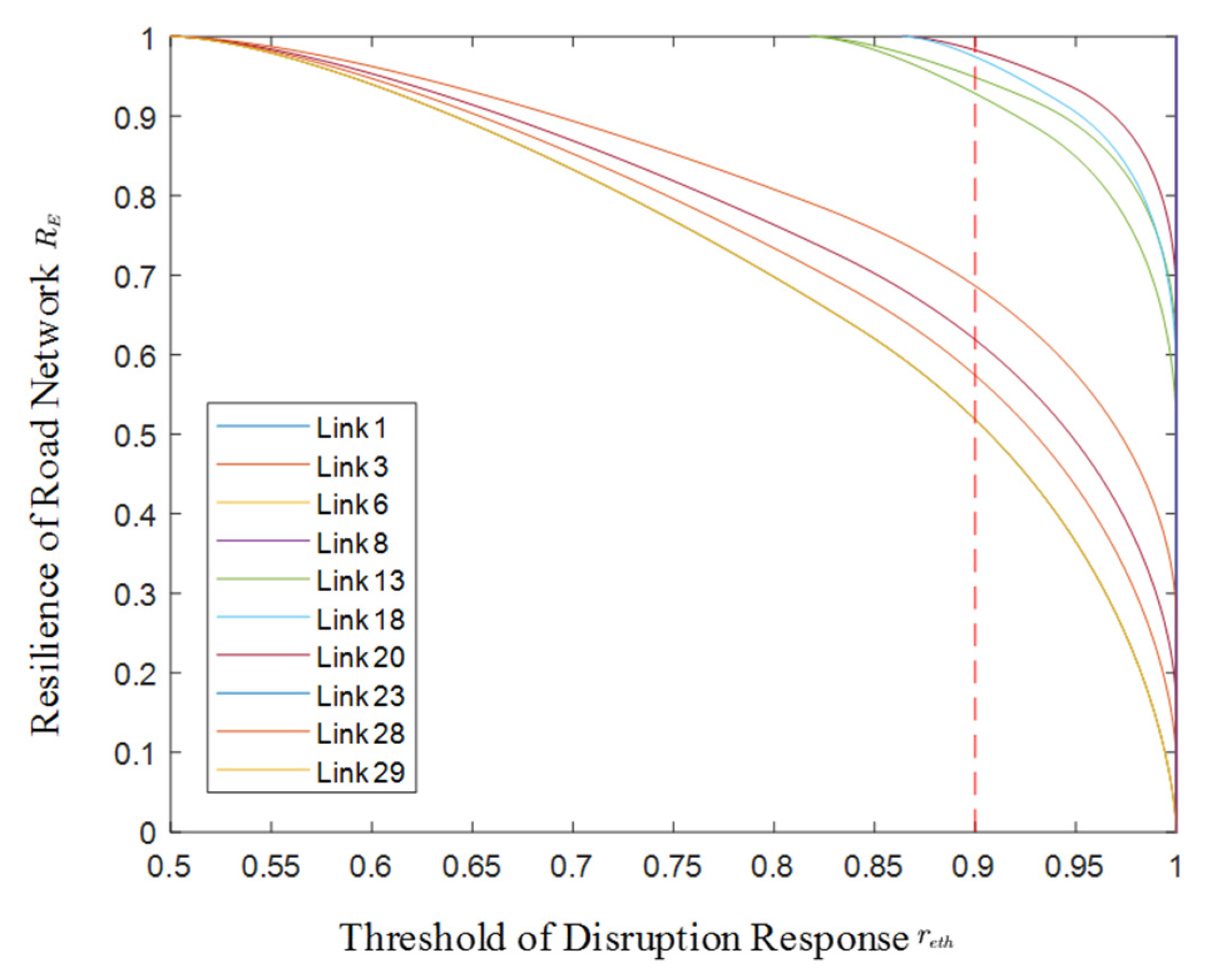
5.3.2. Results and Discussion
6. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Conflicts of Interest
References
- Li, R.Y.; Dong, Q.; Jin, C.; Kang, R. A New Resilience Measure for Supply Chain Networks. Sustainability 2017, 9, 144. [Google Scholar] [CrossRef] [Green Version]
- Hines, P.; Apt, J.; Talukdar, S. Large blackouts in North America: Historical trends and policy implications. Energy Policy 2009, 37, 5249–5259. [Google Scholar] [CrossRef]
- Smith, C.M.; Graffeo, C.S. Regional impact of Hurricane Isabel on emergency departments in coastal southeastern Virginia. Acad. Emerg. Med. 2005, 12, 1201–1205. [Google Scholar] [CrossRef]
- MacKenzie, C.A.; Santos, J.R.; Barker, K. Measuring changes in international production from a disruption: Case study of the Japanese earthquake and tsunami. Int. J. Prod. Econ. 2012, 138, 293–302. [Google Scholar] [CrossRef]
- Bruneau, M.; Chang, S.E.; Eguchi, R.T.; Lee, G.C.; O’Rourke, T.D.; Reinhorn, A.M.; Shinozuka, M.; Tierney, K.; Wallace, W.A.; von Winterfeldt, D. A framework to quantitatively assess and enhance the seismic resilience of communities. Earthq. Spectra 2003, 19, 733–752. [Google Scholar] [CrossRef] [Green Version]
- Arcuri, R.; Bellas, H.C.; de Souza Ferreira, D.; Bulhões, B.; Vidal, M.C.R.; de Carvalho, P.V.R.; Jatobá, A.; Hollnagel, E. On the brink of disruption: Applying Resilience Engineering to anticipate system performance under crisis. Appl. Ergon. 2022, 99, 103632. [Google Scholar] [CrossRef]
- Cook, R.I.; Long, B.A. Building and revising adaptive capacity sharing for technical incident response: A case of resilience engineering. Appl. Ergon. 2021, 90, 103240. [Google Scholar] [CrossRef]
- Woods, D.D. Four concepts for resilience and the implications for the future of resilience engineering. Reliab. Eng. Syst. Saf. 2015, 141, 5–9. [Google Scholar] [CrossRef]
- Jain, P.; Mentzer, R.; Mannan, M.S. Resilience metrics for improved process-risk decision making: Survey, analysis and application. Saf. Sci. 2018, 108, 13–28. [Google Scholar] [CrossRef]
- Pawar, B.; Park, S.; Hu, P.f.; Wang, Q.S. Applications of resilience engineering principles in different fields with a focus on industrial systems: A literature review. J. Loss Prev. Process Ind. 2021, 69, 104366. [Google Scholar] [CrossRef]
- Abbasnejadfard, M.; Bastami, M.; Abbasnejadfard, M.; Borzoo, S. Novel deterministic and probabilistic resilience assessment measures for engineering and infrastructure systems based on the economic impacts. Int. J. Disaster Risk Reduct. 2022, 75, 102956. [Google Scholar] [CrossRef]
- Shafieezadeh, A.; Burden, L.I. Scenario-based resilience assessment framework for critical infrastructure systems: Case study for seismic resilience of seaports. Reliab. Eng. Syst. Saf. 2014, 132, 207–219. [Google Scholar] [CrossRef]
- Dessavre, D.G.; Ramirez-Marquez, J.E.; Barker, K. Multidimensional approach to complex system resilience analysis. Reliab. Eng. Syst. Saf. 2016, 149, 34–43. [Google Scholar] [CrossRef]
- Ouyang, M.; Dueñas-Osorio, L.; Min, X. A three-stage resilience analysis framework for urban infrastructure systems. Struct. Saf. 2012, 36–37, 23–31. [Google Scholar] [CrossRef]
- Henry, D.; Ramirez-Marquez, J.E. Generic metrics and quantitative approaches for system resilience as a function of time. Reliab. Eng. Syst. Saf. 2012, 99, 114–122. [Google Scholar] [CrossRef]
- Omer, M.; Mostashari, A.; Nilchiani, R. Assessing resilience in a regional road-based transportation network. Int. J. Ind. Syst. Eng. 2013, 13, 389–408. [Google Scholar] [CrossRef]
- Cox, A.; Prager, F.; Rose, A. Transportation security and the role of resilience: A foundation for operational metrics. Transp. Policy 2011, 18, 307–317. [Google Scholar] [CrossRef]
- Bhavathrathan, B.K.; Patil, G.R. Capacity uncertainty on urban road networks: A critical state and its applicability in resilience quantification. Comput. Environ. Urban Syst. 2015, 54, 108–118. [Google Scholar] [CrossRef]
- Ouyang, M.; Duenas-Osorio, L. Multi-dimensional hurricane resilience assessment of electric power systems. Struct. Saf. 2014, 48, 15–24. [Google Scholar] [CrossRef]
- Chang, S.E.; Shinozuka, M. Measuring improvements in the disaster resilience of communities. Earthq. Spectra 2004, 20, 739–755. [Google Scholar] [CrossRef]
- Li, Y.; Lence, B.J. Estimating resilience for water resources systems. Water Resour. Res. 2007, 43, W07422. [Google Scholar] [CrossRef]
- Roach, T.; Kapelan, Z.; Ledbetter, R. Resilience-based performance metrics for water resources management under uncertainty. Adv. Water Resour. 2018, 116, 18–28. [Google Scholar] [CrossRef]
- Rocchetta, R.; Patelli, E. Assessment of power grid vulnerabilities accounting for stochastic loads and model imprecision. Int. J. Electr. Power Energy Syst. 2018, 98, 219–232. [Google Scholar] [CrossRef] [Green Version]
- Fang, Y.P.; Pedroni, N.; Zio, E. Resilience-Based Component Importance Measures for Critical Infrastructure Network Systems. IEEE Trans. Reliab. 2016, 65, 502–512. [Google Scholar] [CrossRef]
- Wright, R.; Parpas, P.; Stoianov, I. Experimental investigation of resilience and pressure management in water distribution networks. Procedia Eng. 2015, 119, 643–652. [Google Scholar] [CrossRef] [Green Version]
- Nozhati, S.; Sarkale, Y.; Ellingwood, B.; Chong, E.K.P.; Mahmoud, H. Near-optimal planning using approximate dynamic programming to enhance post-hazard community resilience management. Reliab. Eng. Syst. Saf. 2019, 181, 116–126. [Google Scholar] [CrossRef] [Green Version]
- Li, Z.L.; Jin, C.; Hu, P.; Wang, C. Resilience-based transportation network recovery strategy during emergency recovery phase under uncertainty. Reliab. Eng. Syst. Saf. 2019, 188, 503–514. [Google Scholar] [CrossRef]
- Miller-Hooks, E.; Zhang, X.D.; Faturechi, R. Measuring and maximizing resilience of freight transportation networks. Comput. Oper. Res. 2012, 39, 1633–1643. [Google Scholar] [CrossRef]
- Zhang, X.G.; Mahadevan, S.; Sankararaman, S.; Goebel, K. Resilience-based network design under uncertainty. Reliab. Eng. Syst. Saf. 2018, 169, 364–379. [Google Scholar] [CrossRef]
- Salas, J.; Yepes, V. Enhancing Sustainability and Resilience through Multi-Level Infrastructure Planning. Int. J. Environ. Res. Public Health 2020, 17, 962. [Google Scholar] [CrossRef] [Green Version]
- Rocchetta, R.; Zio, E.; Patelli, E. A power-flow emulator approach for resilience assessment of repairable power grids subject to weather-induced failures and data deficiency. Appl. Energy 2018, 210, 339–350. [Google Scholar] [CrossRef]
- Wang, Y.; Fu, S.; Wu, B.; Huang, J.; Wei, X. Towards optimal recovery scheduling for dynamic resilience of networked infrastructure. J. Syst. Eng. Electron. 2018, 29, 995–1008. [Google Scholar] [CrossRef] [Green Version]
- Der Kiureghian, A.; Ditlevsen, O. Aleatory or epistemic? Does it matter? Struct. Saf. 2009, 31, 105–112. [Google Scholar] [CrossRef]
- Yang, Y.; Gu, J.; Huang, S.; Wen, M.; Qin, Y.; Liu, W.; Guo, L. Spare parts transportation optimization considering supportability based on uncertainty theory. Symmetry 2022, 14, 891. [Google Scholar] [CrossRef]
- Aven, T.; Zio, E. Some considerations on the treatment of uncertainties in risk assessment for practical decision making. Reliab. Eng. Syst. Saf. 2011, 96, 64–74. [Google Scholar] [CrossRef]
- Gardoni, P.; Kiureghian, A.D.; Mosalam, K.M. Probabilistic capacity models and fragility estimates for reinforced concrete columns based on experimental observations. J. Eng. Mech. Asce 2002, 128, 1024–1038. [Google Scholar] [CrossRef]
- Filippi, G.; Vasile, M.; Krpelik, D.; Korondi, P.Z.; Marchi, M.; Poloni, C. Space systems resilience optimization under epistemic uncertainty. Acta Astronaut. 2019, 165, 195–210. [Google Scholar] [CrossRef]
- Kang, R.; Zhang, Q.Y.; Zeng, Z.G.; Enrico, Z.; Li, X.Y. Measuring reliability under epistemic uncertainty: Review on non-probabilistic reliability metrics. Chin. J. Aeronaut. 2016, 29, 571–579. [Google Scholar] [CrossRef] [Green Version]
- Li, X.Y.; Tao, Z.; Wu, J.P.; Zhang, W. Uncertainty theory based reliability modeling for fatigue. Eng. Fail. Anal. 2021, 119, 104931. [Google Scholar] [CrossRef]
- Liu, B. Why is there a need for uncertainty theory. J. Uncertain Syst. 2012, 6, 3–10. [Google Scholar]
- Liu, B. Uncertainty Theory, 2nd ed.; Springer: Berlin/Heidelberg, Germany, 2007; pp. 205–233. [Google Scholar]
- Hu, L.; Kang, R.; Pan, X.; Zuo, D. Uncertainty expression and propagation in the risk assessment of uncertain random system. IEEE Syst. J. 2020, 15, 1604–1615. [Google Scholar] [CrossRef]
- Kang, R. Belief Reliability Theory and Methodology; Springer: Singapore, 2021; pp. 71–88. [Google Scholar]
- Li, Y.Y.; Chen, Y.; Zhang, Q.Y.; Kang, R. Belief reliability analysis of multi-state deteriorating systems under epistemic uncertainty. Inf. Sci. 2022, 604, 249–266. [Google Scholar] [CrossRef]
- Liu, B. Some research problems in uncertainty theory. J. Uncertain Syst. 2009, 3, 3–10. [Google Scholar]
- Liu, B. Uncertainty Theory: A Branch of Mathematics for Modeling Human Uncertainty; Springer: Berlin/Heidelberg, Germany, 2010; pp. 1–113. [Google Scholar]
- Bera, S. Geographic variation of resilience to landslide hazard: A household-based comparative studies in Kalimpong hilly region, India. Int. J. Disaster Risk Reduct. 2020, 46, 101456. [Google Scholar] [CrossRef]
- Lio, W.O.; Liu, B.D. Uncertain maximum likelihood estimation with application to uncertain regression analysis. Soft Comput. 2020, 24, 9351–9360. [Google Scholar] [CrossRef]
- Wang, X.S.; Gao, Z.C.; Guo, H.Y. Delphi Method for Estimating Uncertainty Distributions. Inf. Int. Interdiscip. J. 2012, 15, 449–459. [Google Scholar] [CrossRef]
- Liu, B. Theory and Practice of Uncertain Programming; Springer: Berlin/Heidelberg, Germany, 2009; Volume 239, pp. 349–363. [Google Scholar]
- Hillier, F.S. Introduction to Operations Research, 7th ed.; McGraw-Hill: New York, NY, USA, 2001; pp. 405–467. [Google Scholar]
- Dai, Y.; Poh, K. Solving the Network Interdiction Problem with Genetic Algorithms. In Proceedings of the Fourth Asia-Pacific Conference on Industrial Engineering and Management System, Taipei, Taiwan, 18–20 December 2002. [Google Scholar]
- Li, R.; Gao, Y. On the component resilience importance measures for infrastructure systems. Int. J. Crit. Infrastruct. Prot. 2022, 36, 100481. [Google Scholar] [CrossRef]
- Ahmadian, N.; Lim, G.J.; Cho, J.; Bora, S. A quantitative approach for assessment and improvement of network resilience. Reliab. Eng. Syst. Saf. 2020, 200, 106977. [Google Scholar] [CrossRef]
- Khatavkar, P.; Mays, L.W. Resilience of water distribution systems during real-time operations under limited water and/or energy availability conditions. J. Water Resour. Plan. Manag. 2019, 145, 04019045. [Google Scholar] [CrossRef]
- Sabouhi, H.; Doroudi, A.; Fotuhi-Firuzabad, M.; Bashiri, M. Electricity distribution grids resilience enhancement by network reconfiguration. Int. Trans. Electr. Energy Syst. 2021, 31, e13047. [Google Scholar] [CrossRef]















{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| 1 | 3 | 5 |
| 2 | 6 | 7 |
| 3 | 3 | 4 |
| 4 | 0 | 1 |
| 5 | 3 | 3 |
| 6 | 0 | 2 |
| 7 | 4 | 4 |
| 8 | 3 | 5 |
| 9 | 3 | 4 |
| 10 | 8 | 9 |
| 11 | 1 | 1 |
| 12 | 6 | 6 |
| Link | Resilience | Link | Resilience |
|---|---|---|---|
| 1 | 0.879 | 7 | 0.66 |
| 2 | 0.644 | 8 | 0.879 |
| 3 | 0.833 | 9 | 0.833 |
| 4 | 1 | 10 | 0.565 |
| 5 | 0.746 | 11 | 1 |
| 6 | 1 | 12 | 0.557 |
| Parameter | Value | |
|---|---|---|
| Optimization model | 0.9 | |
| 0.5 | ||
| Max-flow constraint | 20 | |
| Genetic algorithm | Population NIIND | 100 |
| Generation MAXGEN | 100 | |
| Generation gap GGAP | 0.4 | |
| Cross rate XOVR | 1 | |
| Mutation rate MUTR | 0.1 | |
| Link | Resilience | Link | Resilience |
|---|---|---|---|
| 1 | 0.5184 | 18 | 0.9486 |
| 3 | 0.5184 | 20 | 0.9744 |
| 6 | 0.9281 | 23 | 0.6188 |
| 8 | 0.9827 | 28 | 0.6864 |
| 13 | 0.5741 | 29 | 0.5184 |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2022 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Dong, Q.; Li, R.; Kang, R. System Resilience Evaluation and Optimization Considering Epistemic Uncertainty. Symmetry 2022, 14, 1182. https://doi.org/10.3390/sym14061182
Dong Q, Li R, Kang R. System Resilience Evaluation and Optimization Considering Epistemic Uncertainty. Symmetry. 2022; 14(6):1182. https://doi.org/10.3390/sym14061182
Chicago/Turabian StyleDong, Qiang, Ruiying Li, and Rui Kang. 2022. "System Resilience Evaluation and Optimization Considering Epistemic Uncertainty" Symmetry 14, no. 6: 1182. https://doi.org/10.3390/sym14061182
APA StyleDong, Q., Li, R., & Kang, R. (2022). System Resilience Evaluation and Optimization Considering Epistemic Uncertainty. Symmetry, 14(6), 1182. https://doi.org/10.3390/sym14061182