
Timelike Circular Surfaces and Singularities in Minkowski 3-Space


{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
Abstract
:1. Introduction
2. Basic Concepts
- (i)
- Spacelike angle: If as well as are spacelike vectors at which span a spacelike vector subspace, then , and a unique real number exists that is . It is named the spacelike angle between and .
- (ii)
- Central angle: If and are spacelike vectors at which span a timelike vector subspace, then , and a unique real number exists that is . It is named the central angle between and .
- (iii)
- Lorentzian timelike angle: If is a spacelike vector and is a timelike vector at , then a unique real number exists that is . This is the Lorentzian timelike angle among and .
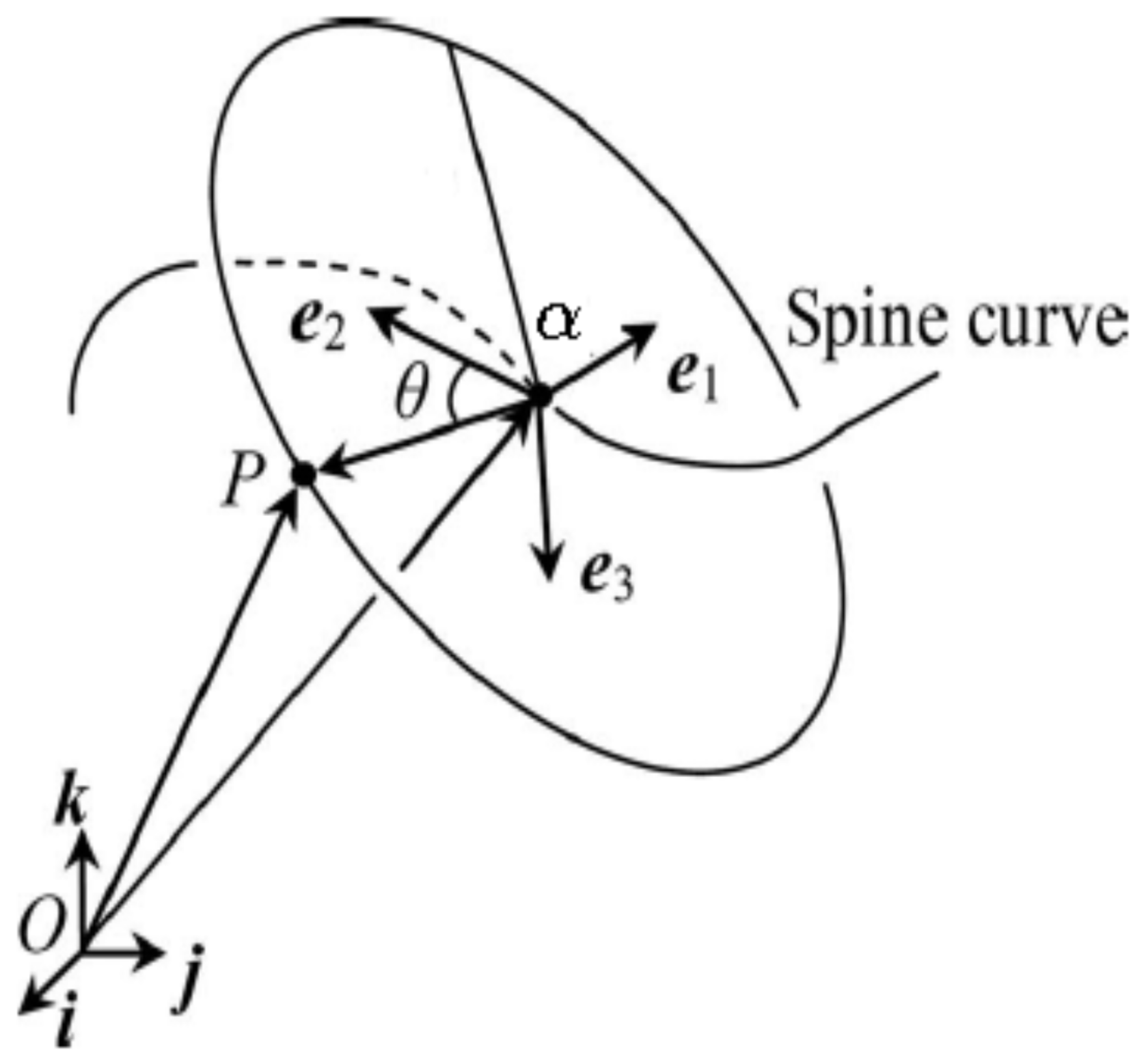
3. Timelike Circular Surfaces
- (1)
- M is named a timelike canal (tubular) surface in the case where the spine curve is perpendicular to the circular plane such that , and satisfy
- (2)
- M is named a timelike roller coaster (or tangent) surface in the case where the spine curve is a tangent to the circular plane such that , and satisfy
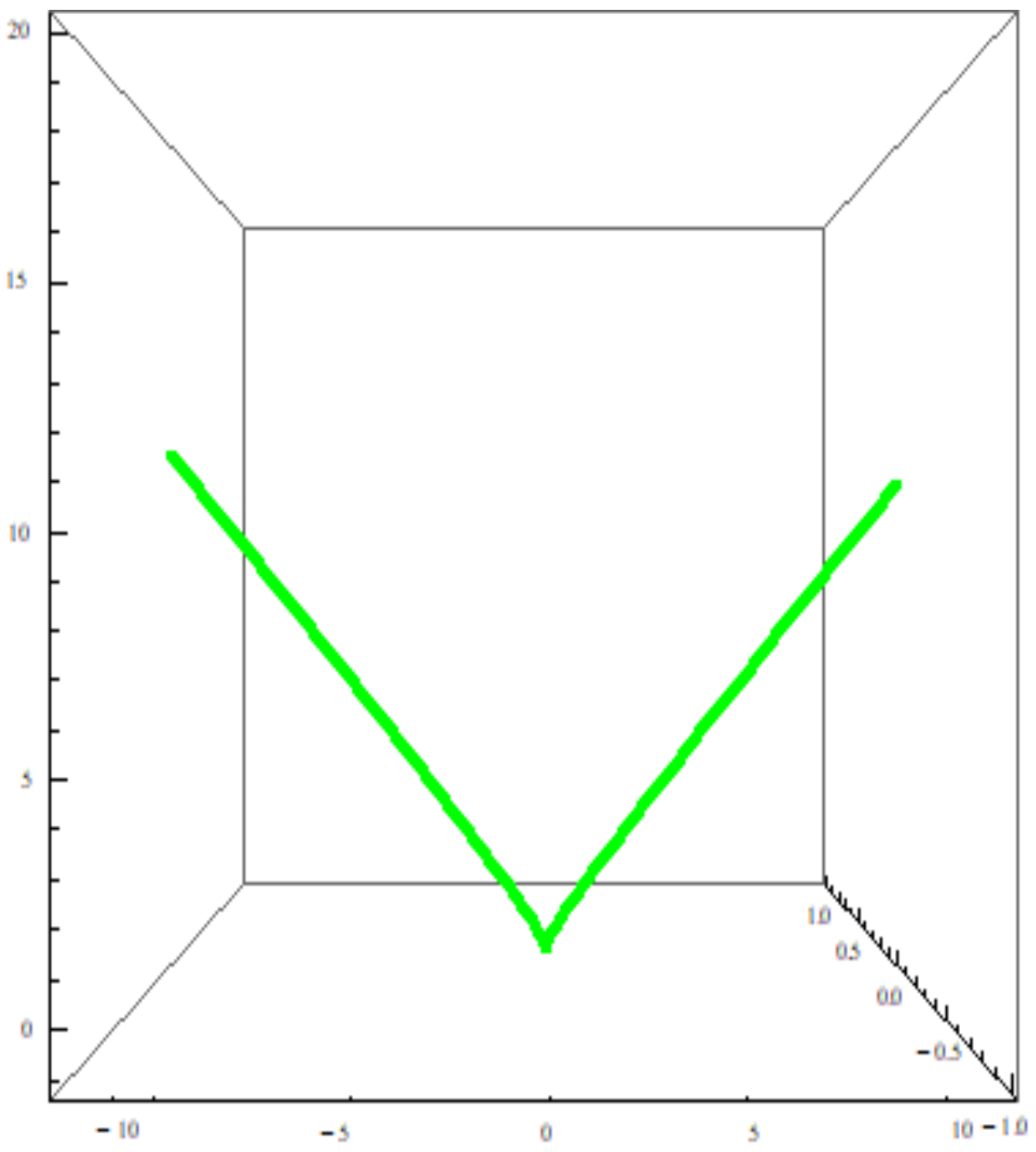
3.1. Striction Curves
3.2. Curvature Lines and Singularities
- Case (1)
- When , then ; that is, the spine curve is a fixed point. This means that the timelike circular surface is a Lorentzian sphere with a radius r. Namely, .
- Case (2)
- When , the spine curve is orthogonal to the spacelike circular plane; that is, is parallel to . Therefore, the timelike circular surface turns into a timelike canal surface with a timelike spine curve.
- Case (3)
- When , the tangent vector is parallel to . Hence, the tangent vector of the spine curve lies at the spacelike circle plane for all points of M. Specifically, . When is constant, consequently, we havewhere is a constant vector. However, using Eqations (8) and (23) leads toThis implies that all the circle points lie on a Lorentzian sphere of a radius , with being its center point in .
- Case (1)
- This exists when . If and , then the singular points are located at and . If and , then the singular points are located at . If , for a timelike circular surface to have singular points, it is necessary that . Therefore, there are two singular points on the generating circle, located at .
- Case (2)
- This exists if . In the case of a timelike circular surface having singular points, it is necessary that . Since , we can say that the singularities are only located when and . Thus, there are two singular points on each generating circle. Adding these two sets of singular points results in two curves (striction curves) that contain all the singular points of a timelike circular surface. Then, the striction curves form a timelike circular surface.
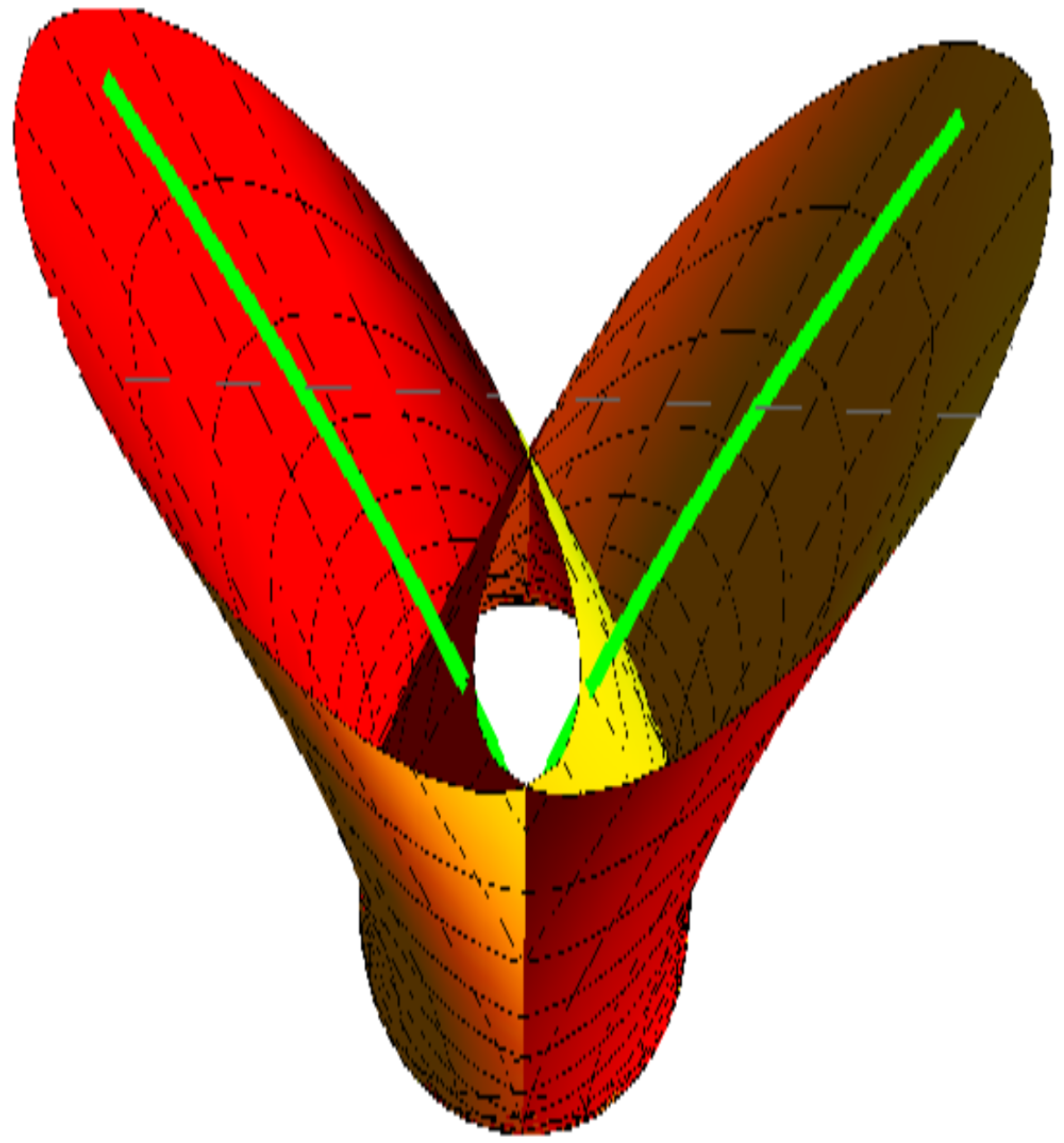
3.3. Timelike Canal (Tubular) Surfaces
3.4. Timelike Canal (Tubular) Surface
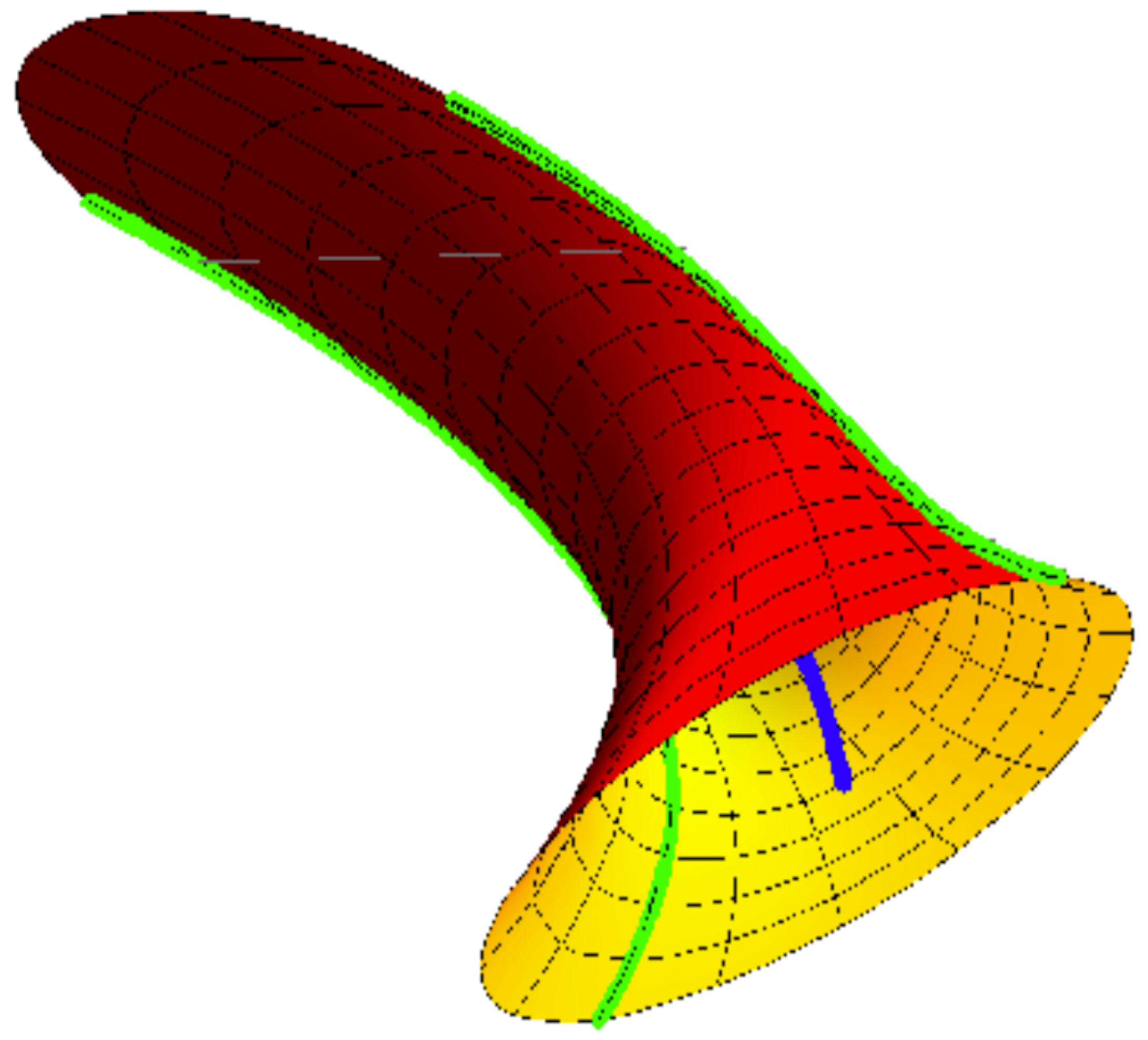
3.5. Timelike Roller Coaster Surfaces
4. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Acknowledgments
Conflicts of Interest
References
- Izumiya, S.; Takeuchi, N. Singularities of ruled surfaces in 𝔼3. In Mathematical Proceedings of the Cambridge Philosophical Society; Cambridge University Press: Cambridge, UK, 2001; Volume 130. [Google Scholar]
- Izumiya, S.; Takeuchi, N. Geometry of ruled surfaces. In Applicable Mathematics in the Golden Age; Narosa Publishing House: New Delhi, India, 2003; pp. 305–338. [Google Scholar]
- Izumiya, S. Special curves and ruled surfaces. Contrib. Algebra Geom. 2003, 44, 203–212. [Google Scholar]
- Blum, R. Circles on surfaces in the Euclidean 3-space. In Geometry and Differential Geometry; Lecture Notes in Mathematics; Springer: Berlin/Heidelberg, Germany, 1980; Volume 792, pp. 213–221. [Google Scholar]
- Xu, Z.; Feng, R.; Sun, J. Analytic and algebraic properties of canal surfaces. J. Comput. Appl. Math. 2006, 195, 220–228. [Google Scholar] [CrossRef]
- Cui, L.; Wang, D.L.; Dai, J.S. Kinematic geometry of circular surfaces with a fixed radius based on Euclidean invariants. ASME J. Mech. 2009, 131, 101009. [Google Scholar]
- Izumiya, S.; Saji, K.; Takeuchi, N. Circular surfaces. Adv. Geom. 2007, 7, 295–313. [Google Scholar] [CrossRef]
- Izumiya, S.; Saji, K.; Takeuchi, N. Great circular surfaces in the three-sphere. Differ. Geom. Appl. 2011, 29, 409–425. [Google Scholar] [CrossRef]
- Gorjanc, S.; Jurkin, E. Circular surfaces CS(α, p). Filomat 2015, 29, 725–737. [Google Scholar] [CrossRef]
- Abdel-Baky, R.A.; Unluturk, Y. On the curvatures of spacelike circular surfaces. Kuwait J. Sci. 2016, 43, 50–58. [Google Scholar]
- Tuncer, O.; Canakcı, Z.; Gok, I.; Yaylı, Y. Circular surfaces with split quaternionic representations in Minkowski 3-space. Adv. Appl. Clifford Algebr. 2018, 28, 63. [Google Scholar] [CrossRef]
- Alluhaibi, N. Circular surfaces and singularities in Euclidean 3-space E3. AIMS Math. 2022, 7, 12671–12688. [Google Scholar] [CrossRef]
- Abdel-Baky, R.; Alluhaibi, N.; Ali, A.; Mofarreh, F. A study on timelike circular surfaces in Minkowski 3-space. Int. J. Geom. Methods Mod. Phys. 2020, 17, 2050074. [Google Scholar] [CrossRef]
- O’Neil, B. Semi-Riemannian Geometry with Applications to Relativity; Academic Press: New York, NY, USA, 1983. [Google Scholar]
- Mc-Nertney, L.V. One-Parameter Families of Surfaces with Constant Curvature in Lorentz Three-Space. Ph.D. Thesis, Brown University, Providence, RI, USA, 1980. [Google Scholar]
- Walrave, J. Curves and Surfaces in Minkowski Space. Ph.D. Thesis, K.U. Leuven, Faculty of Science, Leuven, Belgium, 1995. [Google Scholar]
- Sharma, J.R.; Kumar, S.; Jäntschi, L. On a class of optimal fourth order multiple root solvers without using derivatives. Symmetry 2019, 11, 1452. [Google Scholar] [CrossRef]
- Joita, D.M.; Tomescu, M.A.; Bàlint, D.; Jäntschi, L. An Application of the Eigenproblem for Biochemical Similarity. Symmetry 2021, 13, 1849. [Google Scholar] [CrossRef]
- Jäntschi, L. Introducing Structural Symmetry and Asymmetry Implications in Development of Recent Pharmacy and Medicine. Symmetry 2022, 14, 1674. [Google Scholar] [CrossRef]
- Jäntschi, L. Binomial Distributed Data Confidence Interval Calculation: Formulas, Algorithms and Examples. Symmetry 2022, 14, 1104. [Google Scholar] [CrossRef]
- Jäntschi, L. Formulas, Algorithms and Examples for Binomial Distributed Data Confidence Interval Calculation: Excess Risk, Relative Risk and Odds Ratio. Mathematics 2021, 9, 2506. [Google Scholar] [CrossRef]
- Donatella, B.; Jäntschi, L. Comparison of Molecular Geometry Optimization Methods Based on Molecular Descriptors. Mathematics 2021, 9, 2855. [Google Scholar]
- Mihaela, T.; Jäntschi, L.; Doina, R. Figures of Graph Partitioning by Counting, Sequence and Layer Matrices. Mathematics 2021, 9, 1419. [Google Scholar]
- Kumar, S.; Kumar, D.; Sharma, J.R.; Jäntschi, L. A Family of Derivative Free Optimal Fourth Order Methods for Computing Multiple Roots. Symmetry 2020, 12, 1969. [Google Scholar] [CrossRef]
- Deepak, K.; Janak, R.; Jäntschi, L. A Novel Family of Efficient Weighted-Newton Multiple Root Iterations. Symmetry 2020, 12, 1494. [Google Scholar]
- Janak, R.; Sunil, K.; Jäntschi, L. On Derivative Free Multiple-Root Finders with Optimal Fourth Order Convergence. Mathematics 2020, 8, 1091. [Google Scholar]
- Jäntschi, L. Detecting Extreme Values with Order Statistics in Samples from Continuous Distributions. Mathematics 2020, 8, 216. [Google Scholar] [CrossRef]
- Deepak, K.; Janak, R.; Jäntschi, L. Convergence Analysis and Complex Geometry of an Efficient Derivative-Free Iterative Method. Mathematics 2019, 7, 919. [Google Scholar]
- Jäntschi, L.; Bolboacă, S.D. Conformational study of C24 cyclic polyyne clusters. Int. J. Quantum Chem. 2018, 118, 25614. [Google Scholar] [CrossRef]
- Ünlütürk, Y.; Yilmaz, S. A new approach to timelike surfaces which contain inclined curves as geodesics. Differ. Equ. Dyn. Syst. 2019, 1–8. [Google Scholar] [CrossRef]
- Yang, Z.C.; Li, Y.; Erdoǧdub, M.; Zhu, Y.S. Evolving evolutoids and pedaloids from viewpoints of envelope and singularity theory in Minkowski plane. J. Geom. Phys. 2022, 176, 104513. [Google Scholar] [CrossRef]
- Li, Y.; Ganguly, D.; Dey, S.; Bhattacharyya, A. Conformal η-Ricci solitons within the framework of indefinite Kenmotsu manifolds. AIMS Math. 2022, 7, 5408–5430. [Google Scholar] [CrossRef]
- Li, Y.; Abolarinwa, A.; Azami, S.; Ali, A. Yamabe constant evolution and monotonicity along the conformal Ricci flow. AIMS Math. 2022, 7, 12077–12090. [Google Scholar] [CrossRef]
- Li, Y.; Khatri, M.; Singh, J.P.; Chaubey, S.K. Improved Chen’s Inequalities for Submanifolds of Generalized Sasakian-Space-Forms. Axioms 2022, 11, 324. [Google Scholar] [CrossRef]
- Li, Y.; Uçum, A.; İlarslan, K.; Camcı, Ç. A New Class of Bertrand Curves in Euclidean 4-Space. Symmetry 2022, 14, 1191. [Google Scholar] [CrossRef]
- Li, Y.; Mofarreh, F.; Agrawal, R.P.; Ali, A. Reilly-type inequality for the Φ-Laplace operator on semislant submanifolds of Sasakian space forms. J. Inequal. Appl. 2022, 2022, 102. [Google Scholar] [CrossRef]
- Li, Y.; Mofarreh, F.; Dey, S.; Roy, S.; Ali, A. General Relativistic Space-Time with η1-Einstein Metrics. Mathematics 2022, 10, 2530. [Google Scholar] [CrossRef]
- Li, Y.; Dey, S.; Pahan, S.; Ali, A. Geometry of conformal η-Ricci solitons and conformal η-Ricci almost solitons on Paracontact geometry. Open Math. 2022, 20, 574–589. [Google Scholar] [CrossRef]
- Li, Y.; Şenyurt, S.; Özduran, A.; Canlı, D. The Characterizations of Parallel q-Equidistant Ruled Surfaces. Symmetry 2022, 14, 1879. [Google Scholar] [CrossRef]
- Li, Y.; Haseeb, A.; Ali, M. LP-Kenmotsu manifolds admitting η-Ricci solitons and spacetime. J. Math. 2022, 2022, 6605127. [Google Scholar]
- Antić, M.; Moruz, M.; Van, J. H-Umbilical Lagrangian Submanifolds of the Nearly Kähler × . Mathematics 2020, 8, 1427. [Google Scholar] [CrossRef]
- Antić, M.; Djordje, K. Non-Existence of Real Hypersurfaces with Parallel Structure Jacobi Operator in S6(1). Mathematics 2022, 10, 2271. [Google Scholar] [CrossRef]
- Antić, M. Characterization of Warped Product Lagrangian Submanifolds in . Results Math. 2022, 77, 106. [Google Scholar] [CrossRef]
- Antić, M.; Vrancken, L. Conformally flat, minimal, Lagrangian submanifolds in complex space forms. Sci. China Math. 2022, 65, 1641–1660. [Google Scholar] [CrossRef]
- Antić, M.; Hu, Z.; Moruz, M.; Vrancken, L. Surfaces of the nearly Kähler × preserved by the almost product structure. Math. Nachr. 2021, 294, 2286–2301. [Google Scholar] [CrossRef]
- Antić, M. A class of four-dimensional CR submanifolds in six dimensional nearly Kähler manifolds. Math. Slovaca 2018, 68, 1129–1140. [Google Scholar] [CrossRef]
- Antić, M. A class of four dimensional CR submanifolds of the sphere S6(1). J. Geom. Phys. 2016, 110, 78–89. [Google Scholar] [CrossRef]
- Ali, A.T. Non-lightlike constant angle ruled surfaces in Minkowski 3-space. J. Geom. Phys. 2020, 157, 103833. [Google Scholar] [CrossRef]
- Ali, A.T. A constant angle ruled surfaces. Int. J. Geom. 2018, 7, 69–80. [Google Scholar]
- Ali, A.T. Non-lightlike ruled surfaces with constant curvatures in Minkowski 3-space. Int. J. Geom. Methods Mod. Phys. 2018, 15, 1850068. [Google Scholar] [CrossRef]
- Ali, A.T.; Hamdoon, F.M. Surfaces foliated by ellipses with constant Gaussian curvature in Euclidean 3-space. Korean J. Math. 2017, 25, 537–554. [Google Scholar]
- Ali, A.T.; Abdel Aziz, H.S.; Sorour, A.H. On some geometric properties of quadric surfaces in Euclidean space. Honam Math. J. 2016, 38, 593–611. [Google Scholar] [CrossRef]
- Ali, A.T.; Abdel Aziz, H.S.; Sorour, A.H. On curvatures and points of the translation surfaces in Euclidean 3-space. J. Egyptian Math. Soc. 2015, 23, 167–172. [Google Scholar] [CrossRef] [Green Version]






Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2022 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Li, Y.; Mofarreh, F.; Abdel-Baky, R.A. Timelike Circular Surfaces and Singularities in Minkowski 3-Space. Symmetry 2022, 14, 1914. https://doi.org/10.3390/sym14091914
Li Y, Mofarreh F, Abdel-Baky RA. Timelike Circular Surfaces and Singularities in Minkowski 3-Space. Symmetry. 2022; 14(9):1914. https://doi.org/10.3390/sym14091914
Chicago/Turabian StyleLi, Yanlin, Fatemah Mofarreh, and Rashad A. Abdel-Baky. 2022. "Timelike Circular Surfaces and Singularities in Minkowski 3-Space" Symmetry 14, no. 9: 1914. https://doi.org/10.3390/sym14091914
APA StyleLi, Y., Mofarreh, F., & Abdel-Baky, R. A. (2022). Timelike Circular Surfaces and Singularities in Minkowski 3-Space. Symmetry, 14(9), 1914. https://doi.org/10.3390/sym14091914