
Design and Development of a Geometric Calculator in CATIA

 ,
,  , and
, and
Abstract
:1. Introduction
2. Materials and Methods
2.1. CATIA and VBA
2.2. Geometric Calculator
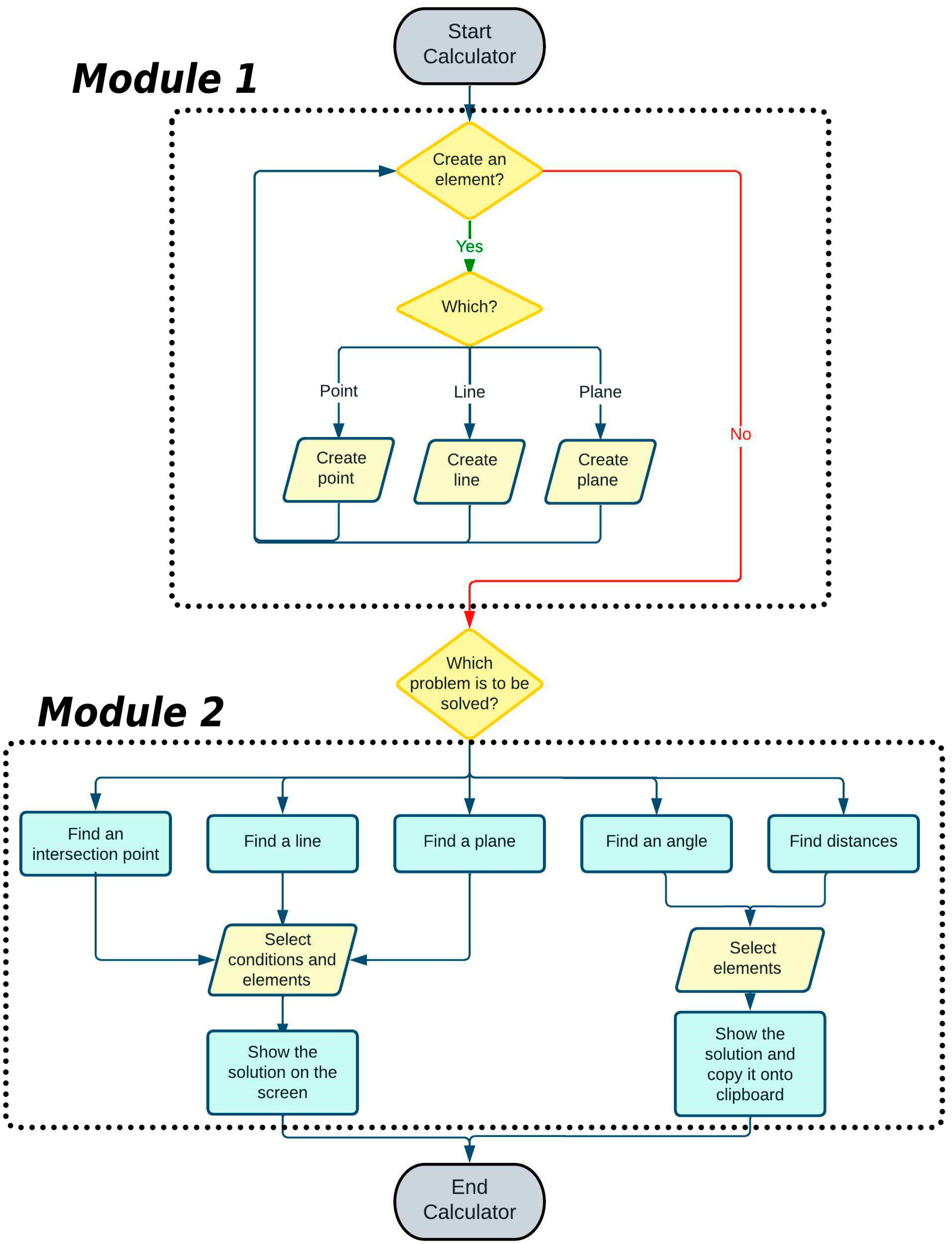
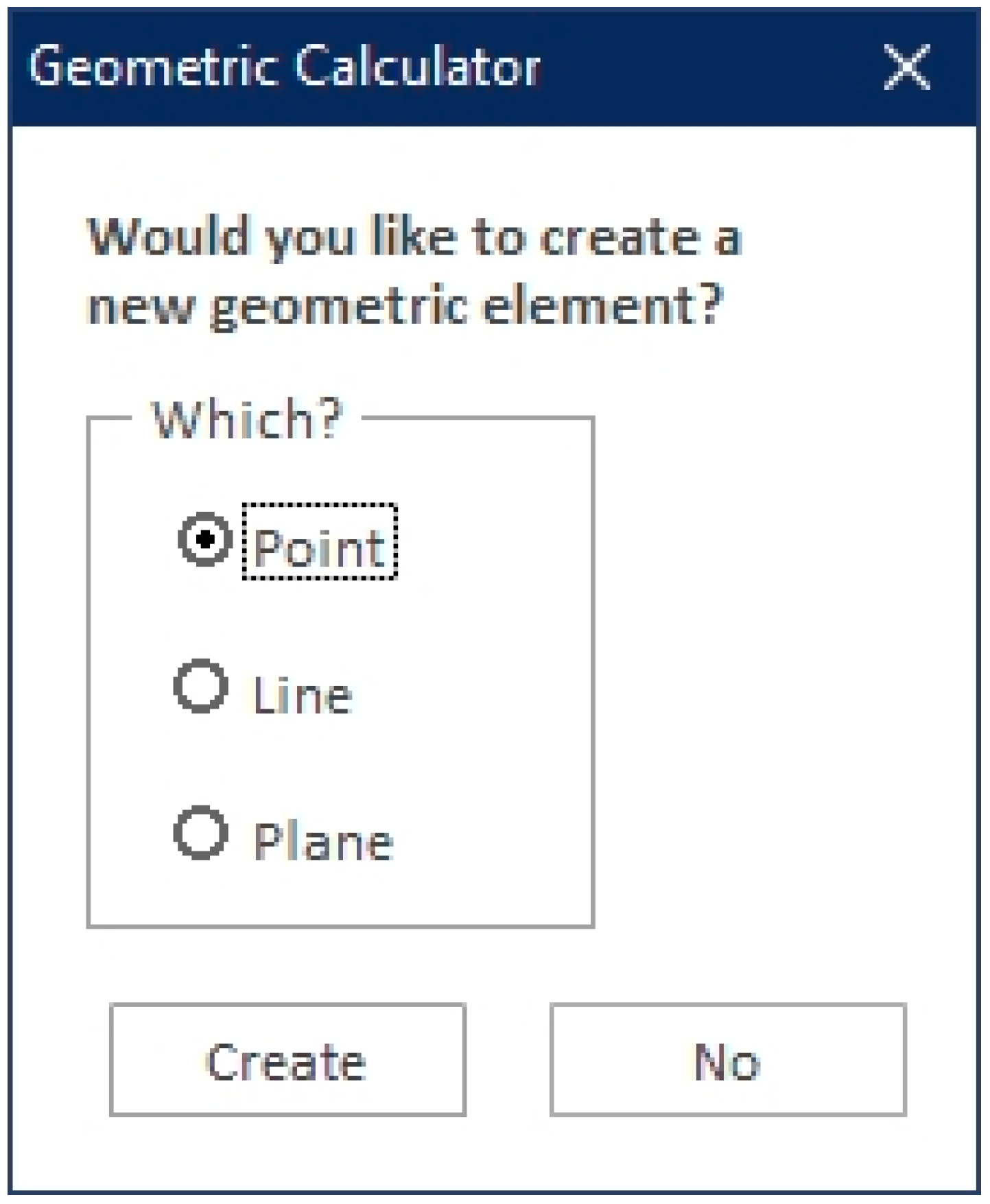
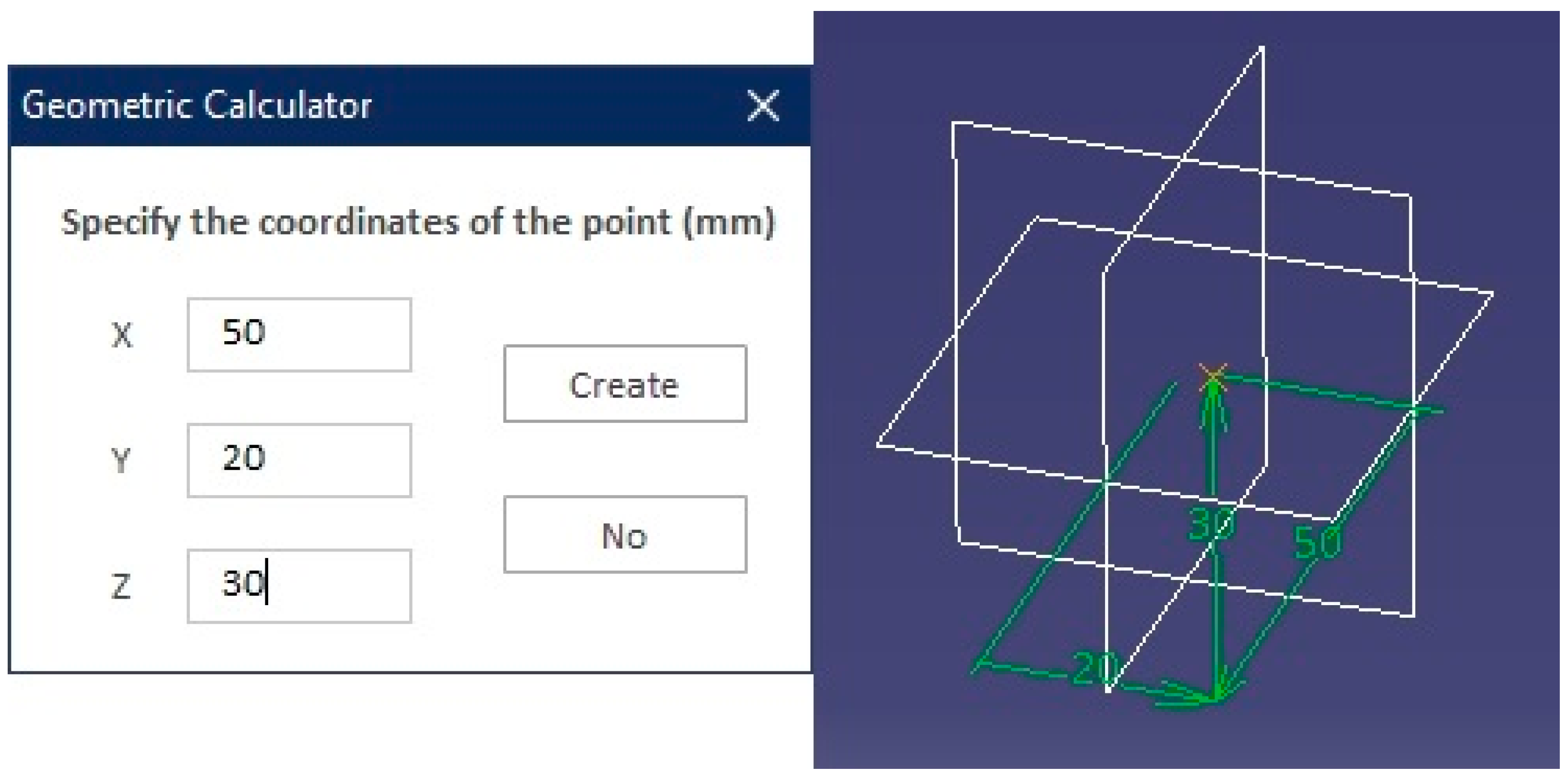
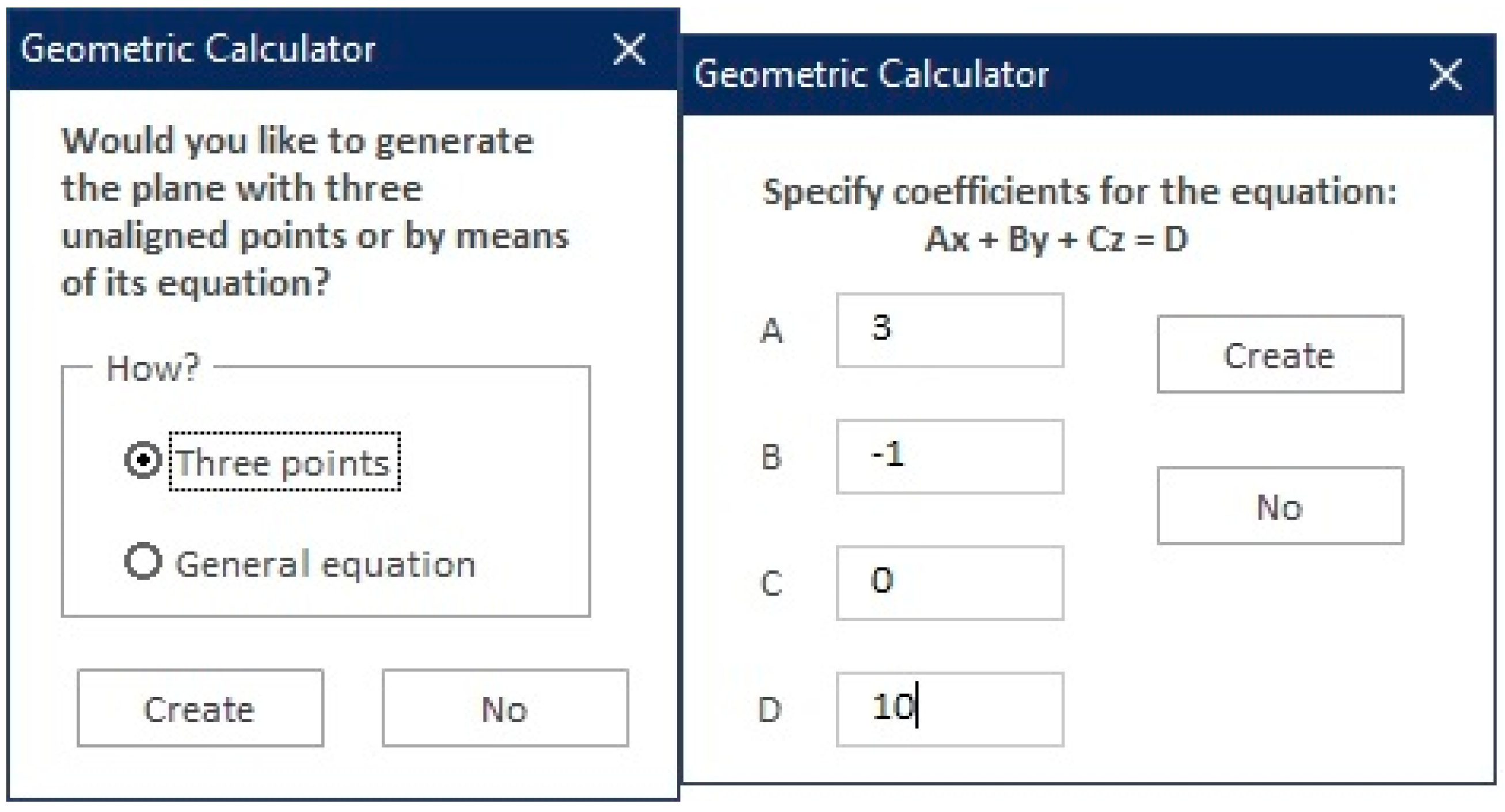
2.2.1. Module 1: Generation of Geometric Elements
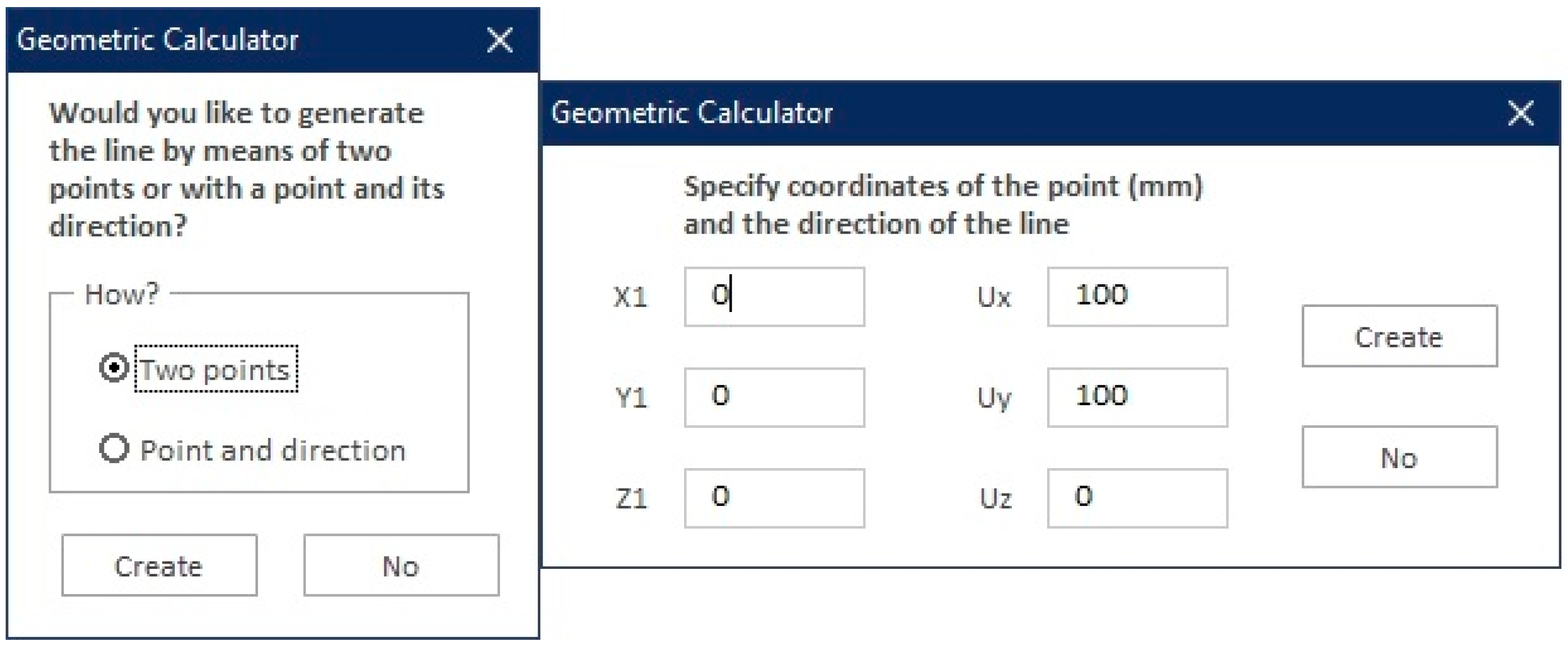
- If the creation of a line is selected (Figure 5, left) a form appears where the user must choose between creating it either depending on two points or with one point and the direction vector of said line (Figure 5, right). The code for the two cases is the same; in the case that a point and the direction of the line are specified, then the program calculates a second point of the line automatically:
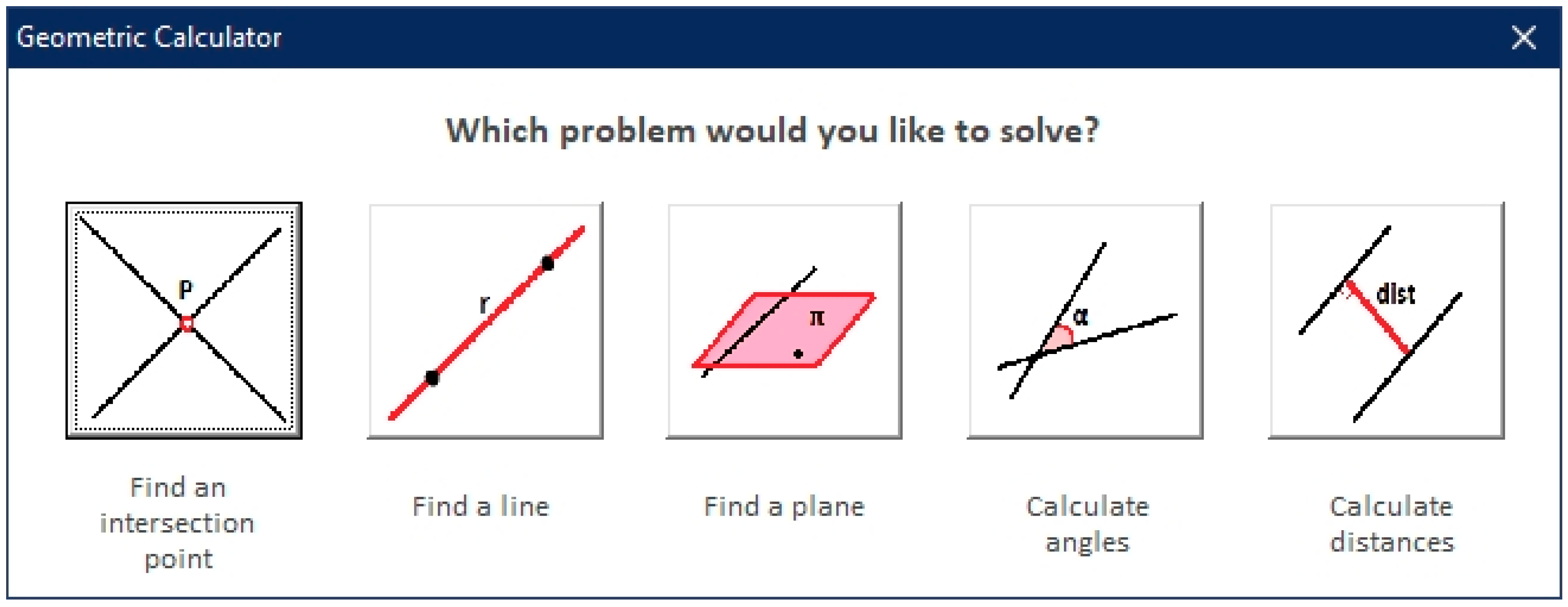
2.2.2. Module 2: Geometric Calculator
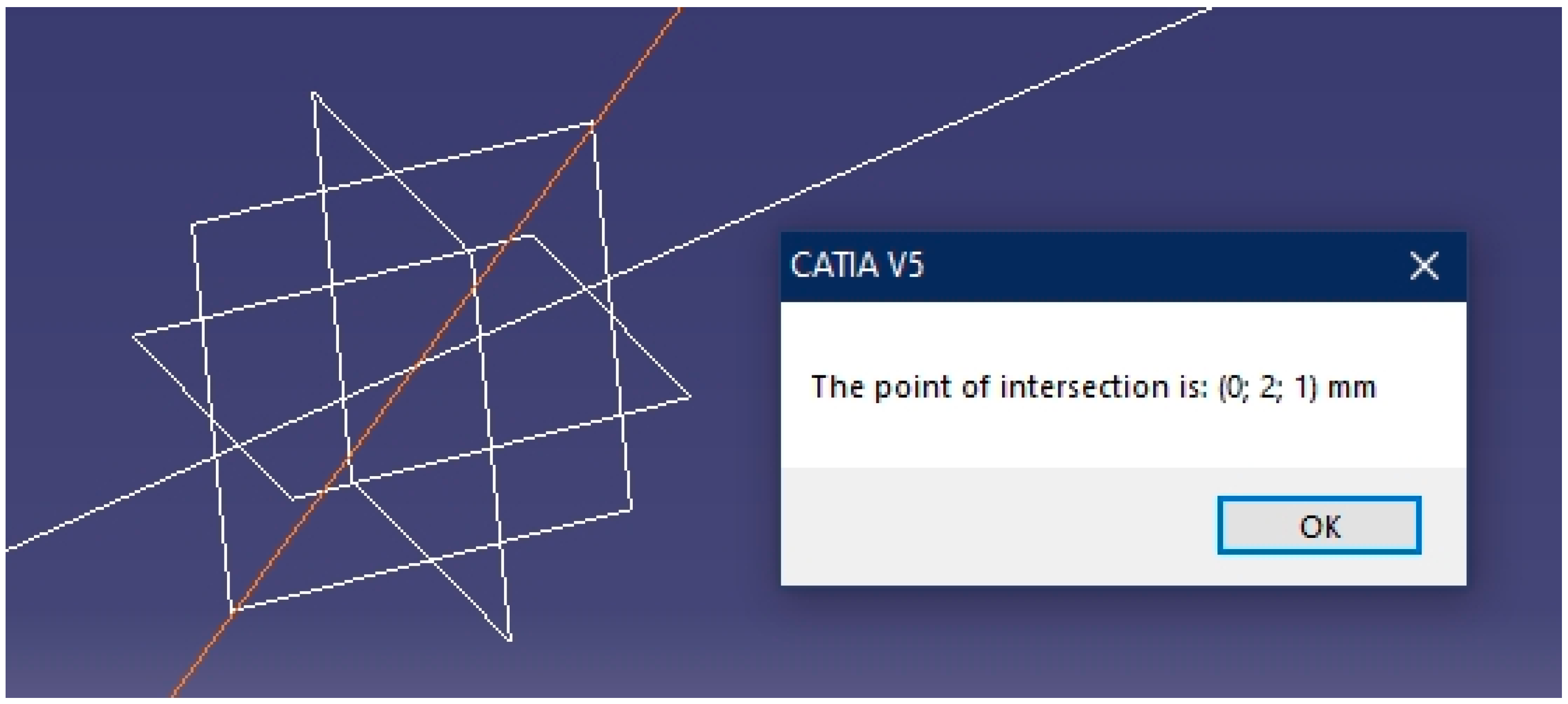
- Find the point of intersection between lines and/or planes.
- Define a line that meets certain conditions.
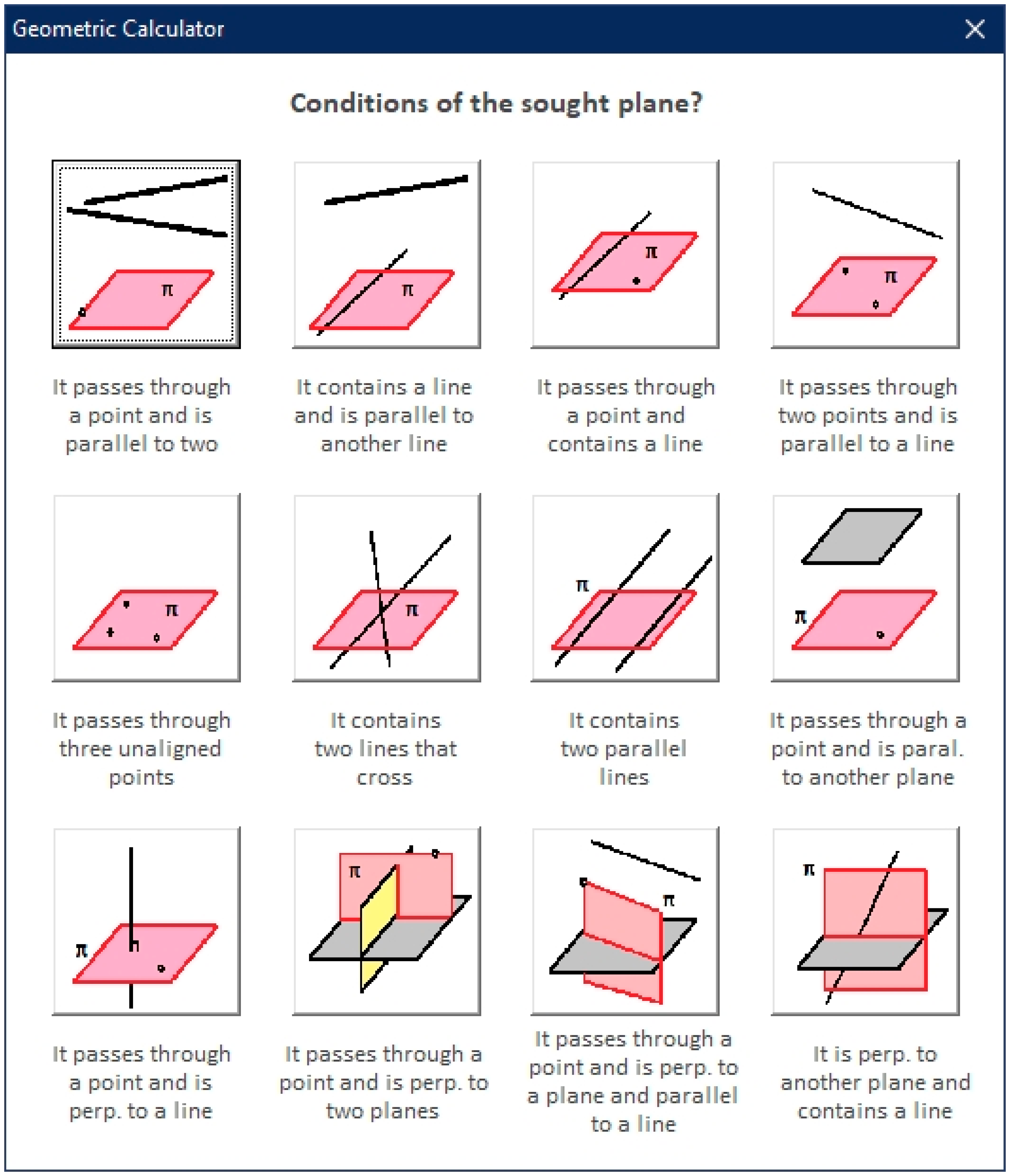
- Define a plane that meets certain conditions.
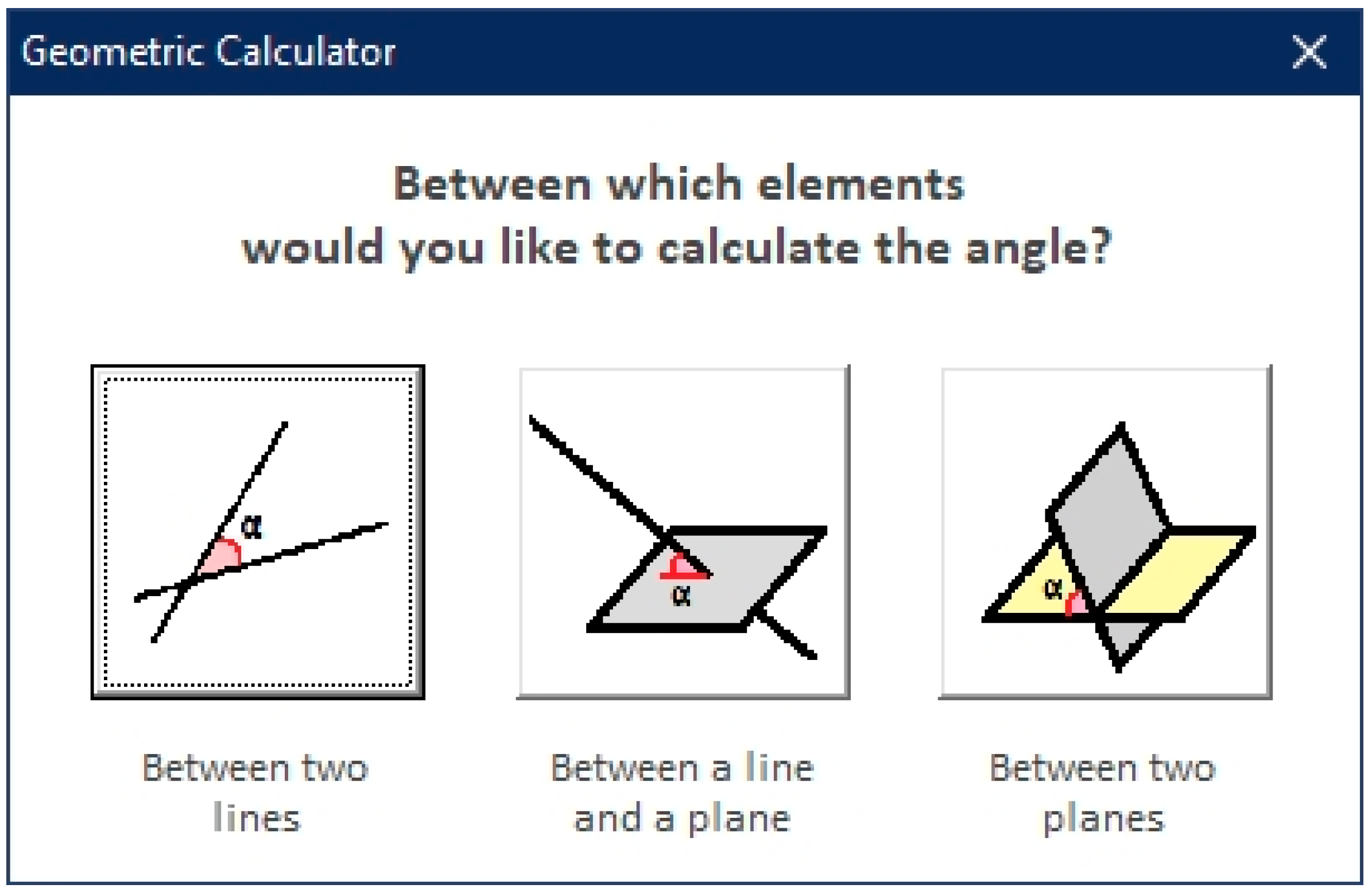
- Calculate the angle between lines and/or planes.
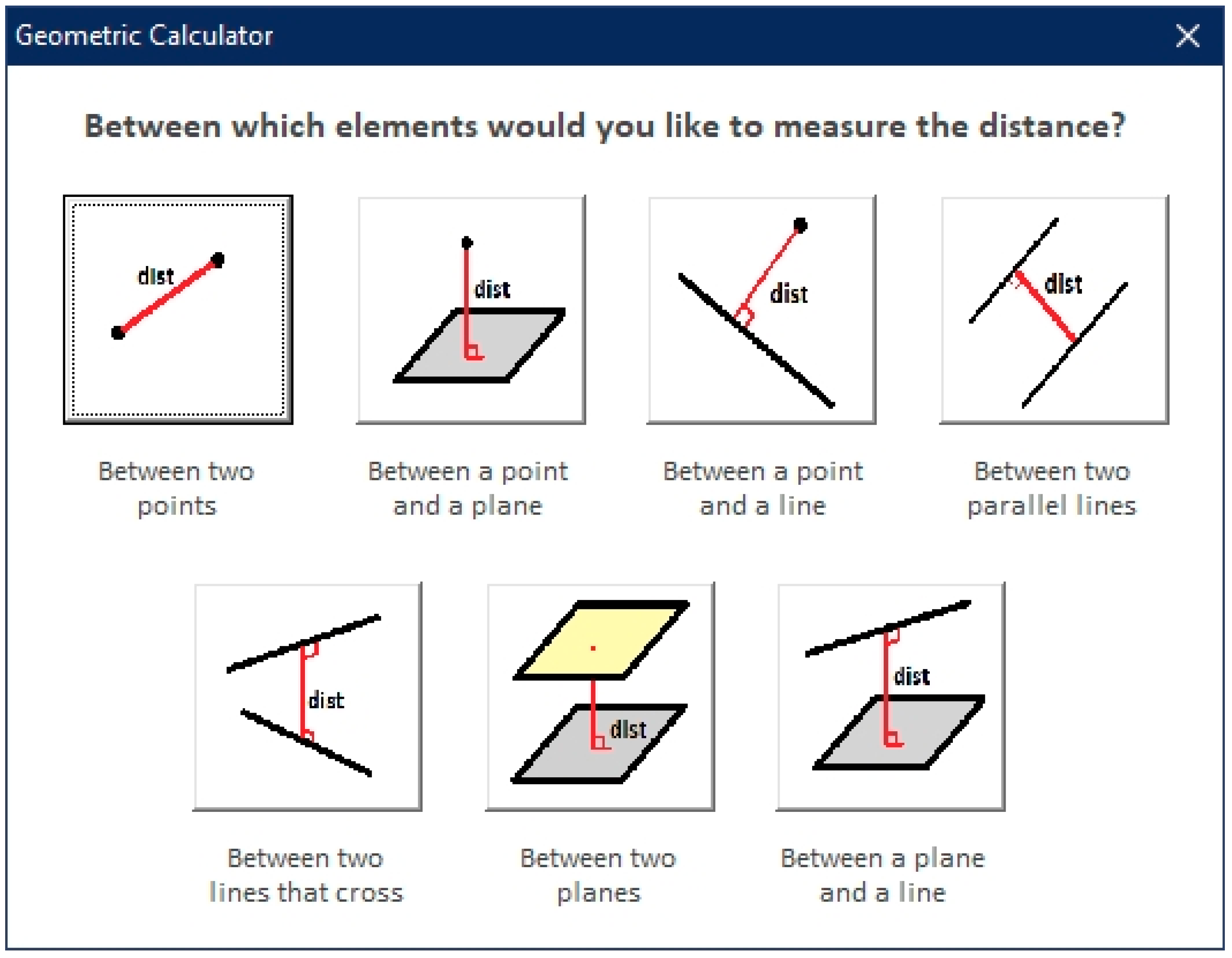
- Calculate the distance between points, lines, and planes.
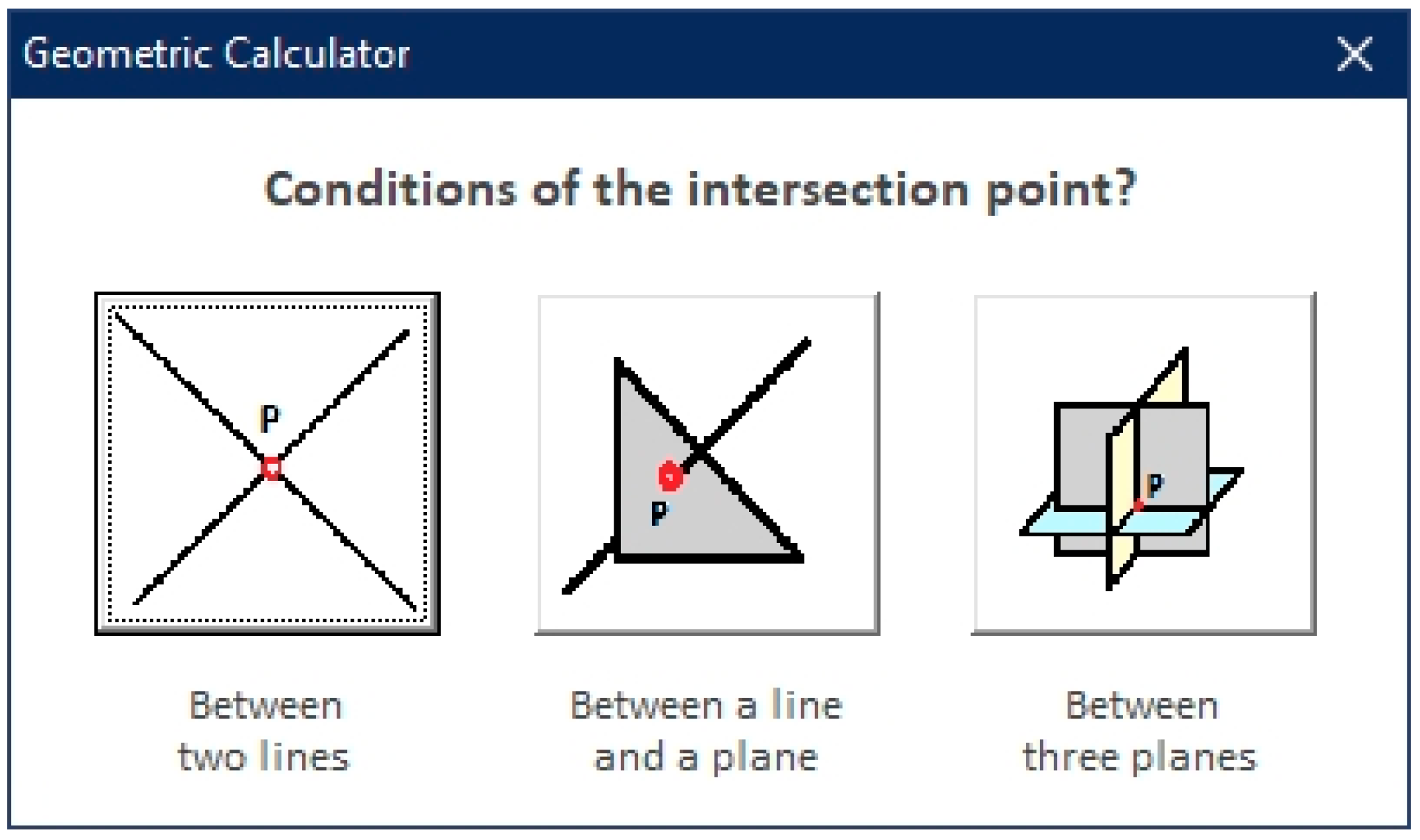
Find Point of Intersection
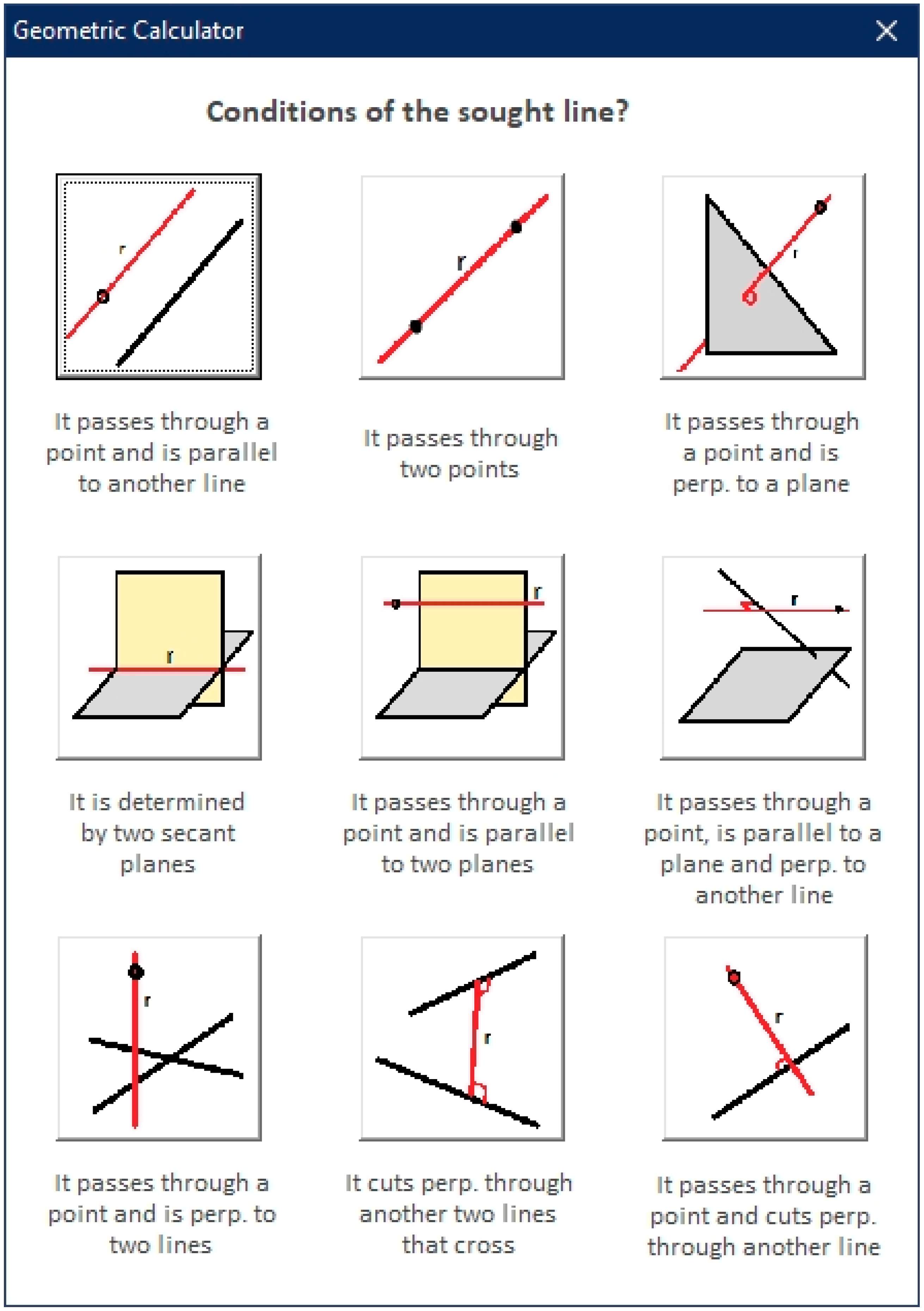
Find Line
Find Plane
Calculate Angles
Calculate Distances
3. Results and Discussion
3.1. Calculation of Intersection Point
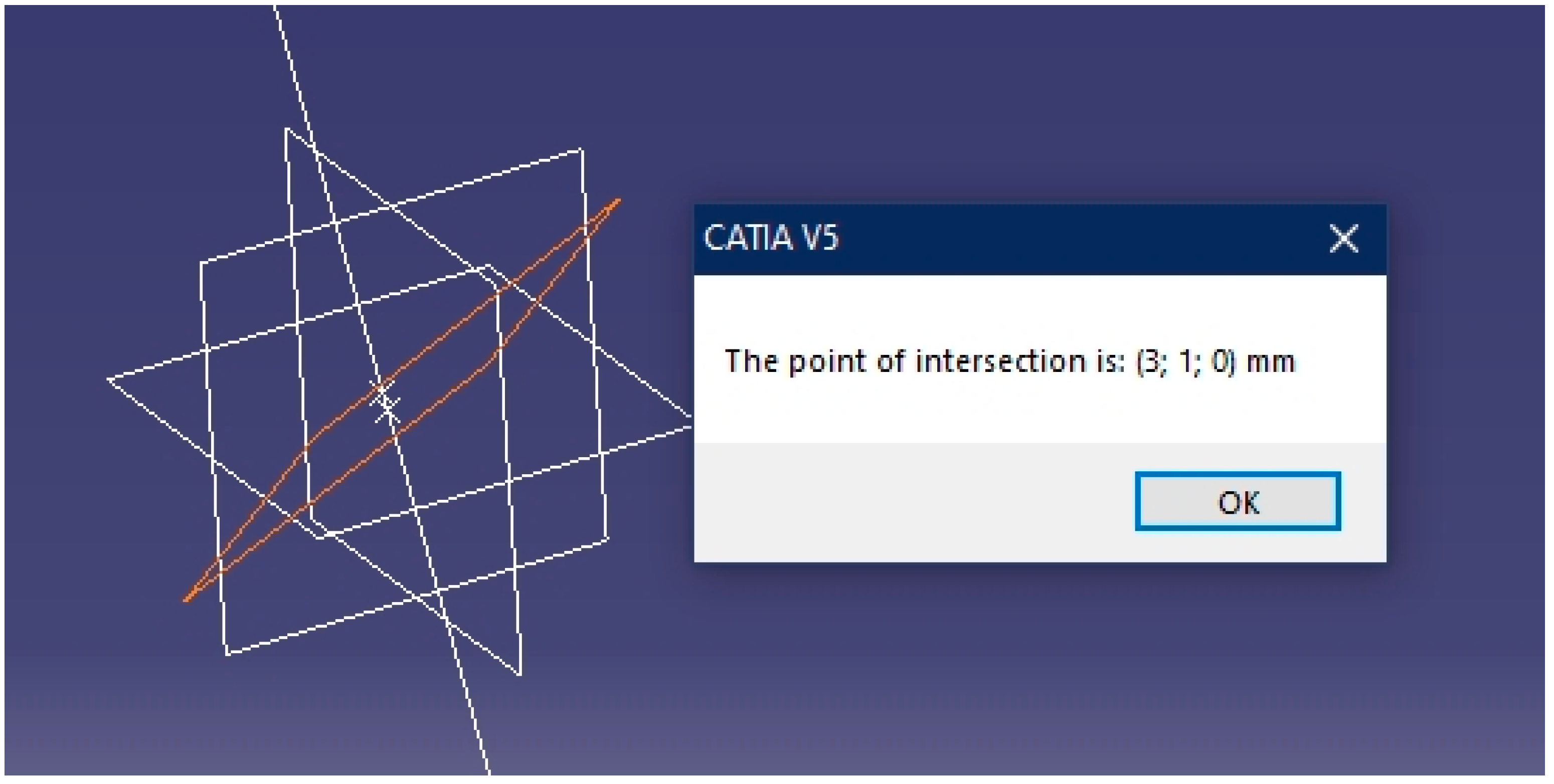
3.1.1. Point of Intersection between Two Lines
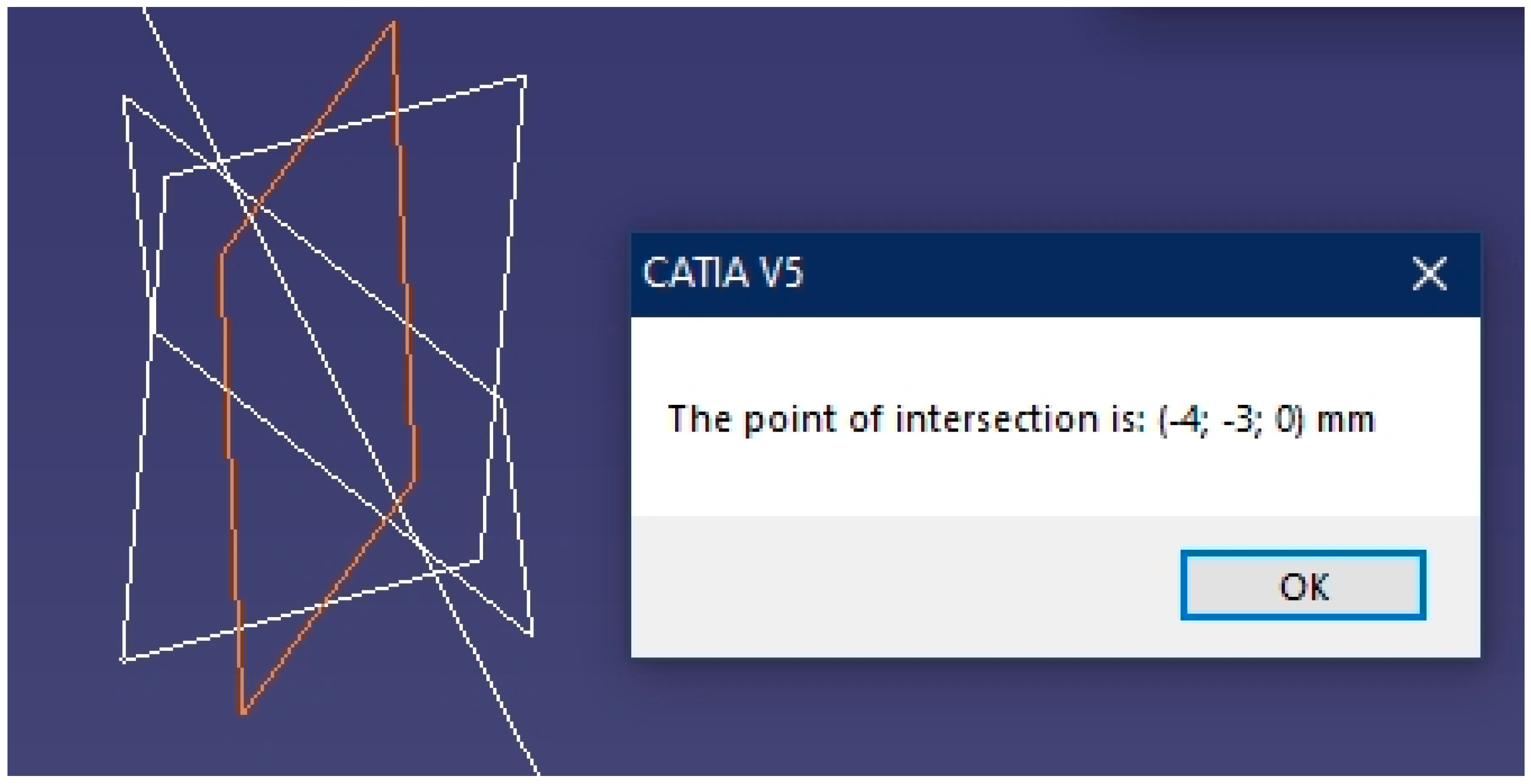
3.1.2. Point of Intersection between a Line and a Plane
3.1.3. Point of Intersection between Three Planes
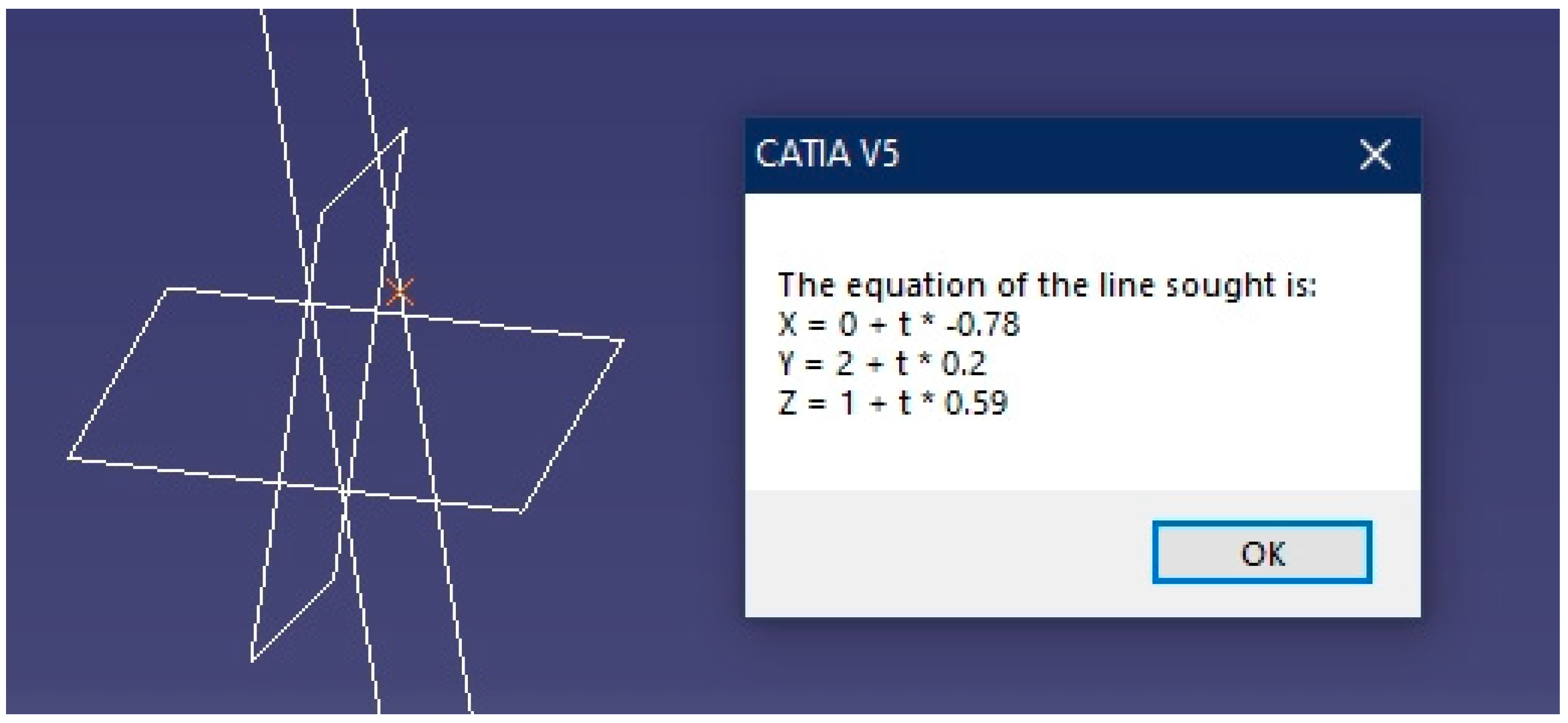
3.2. Determination of Lines
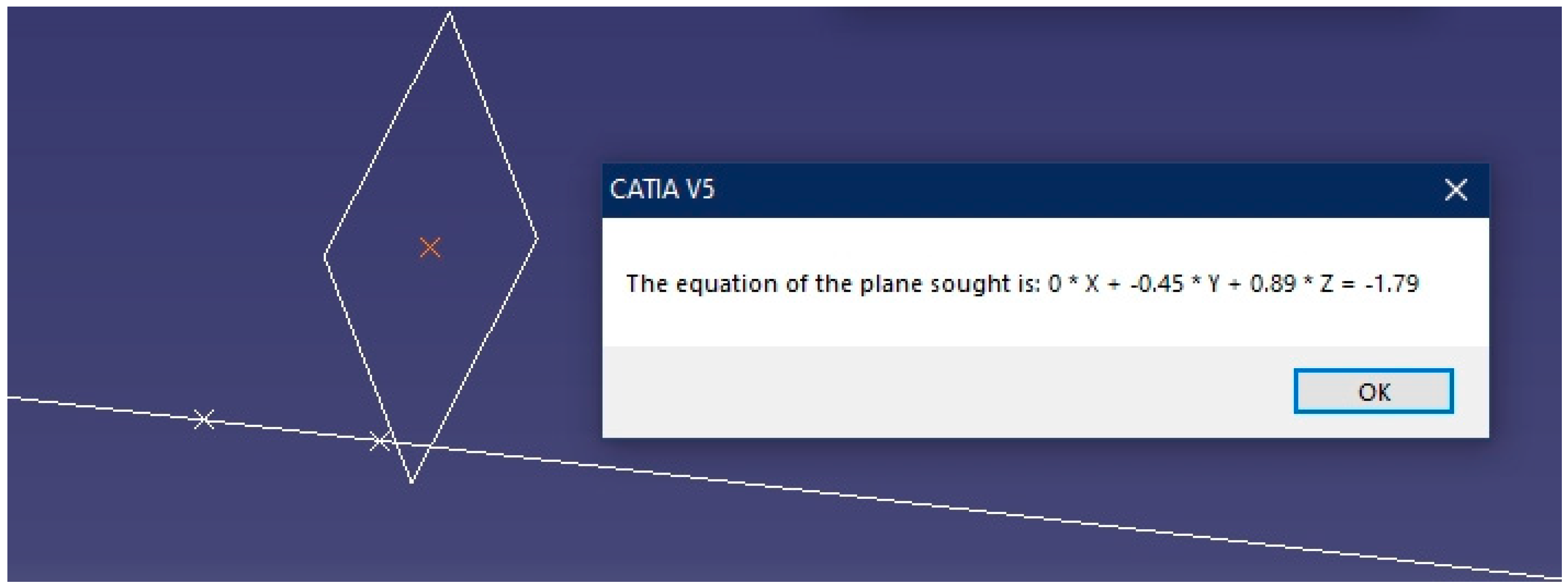
3.3. Determination of Planes
3.4. Angle Calculation
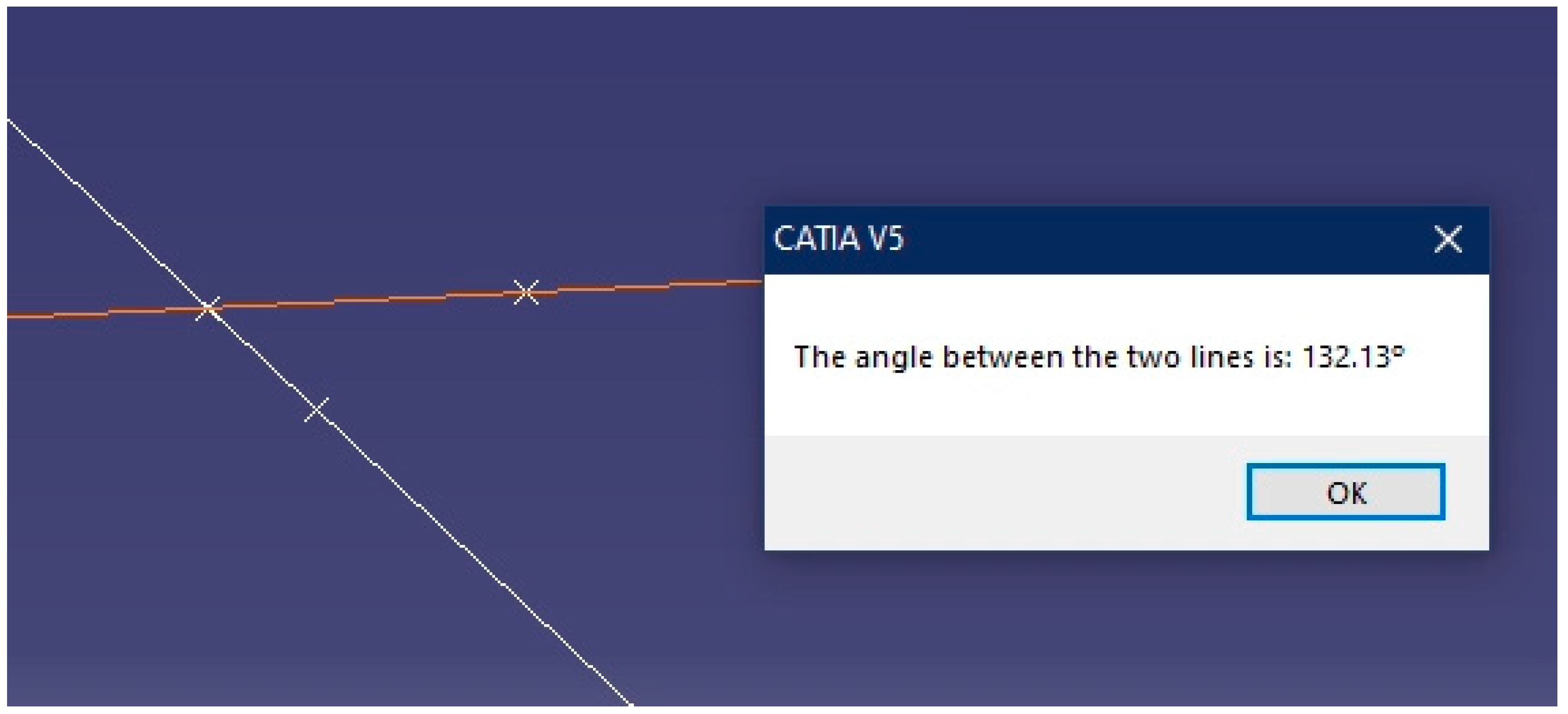
3.4.1. Angle between Two Lines
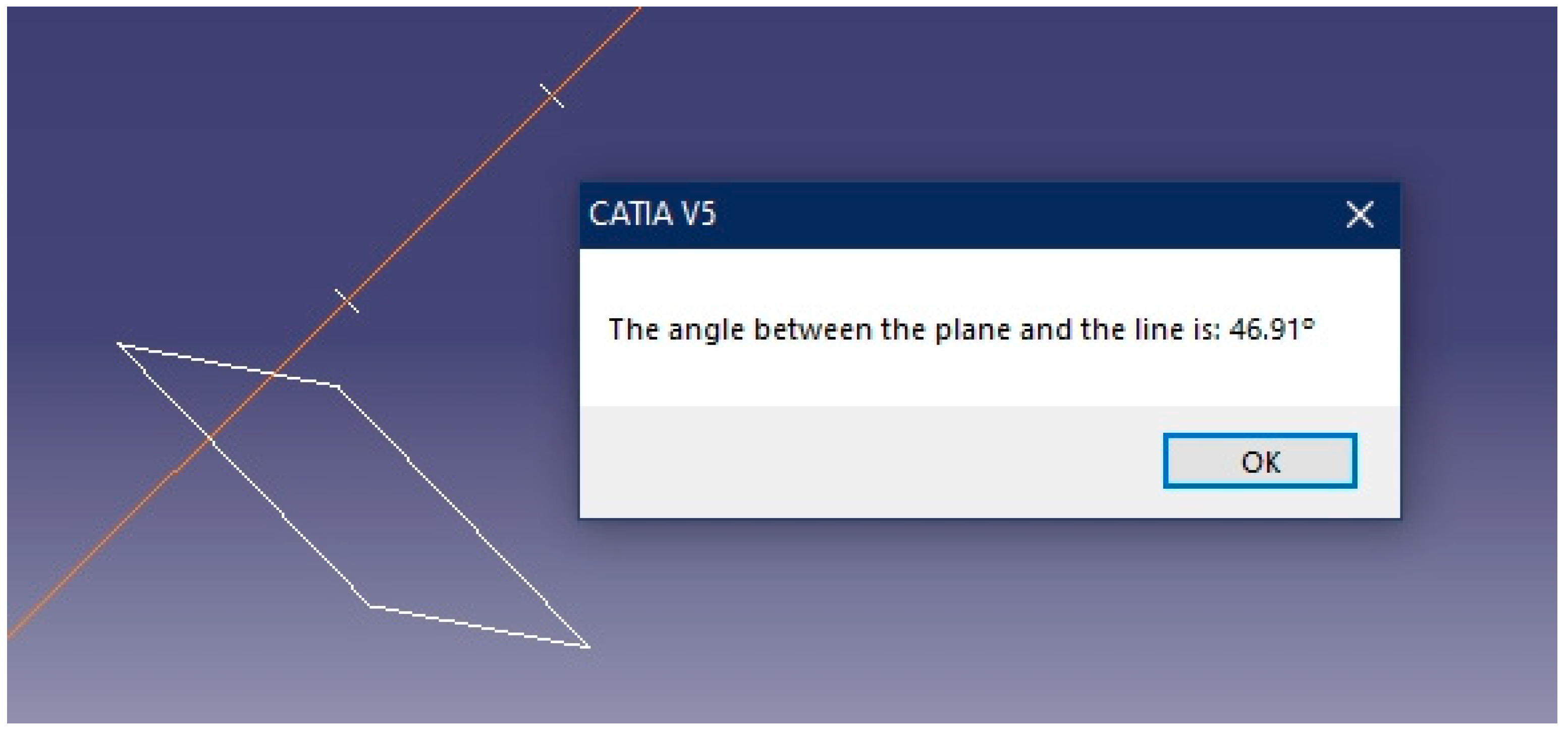
3.4.2. Angle between a Line and a Plane
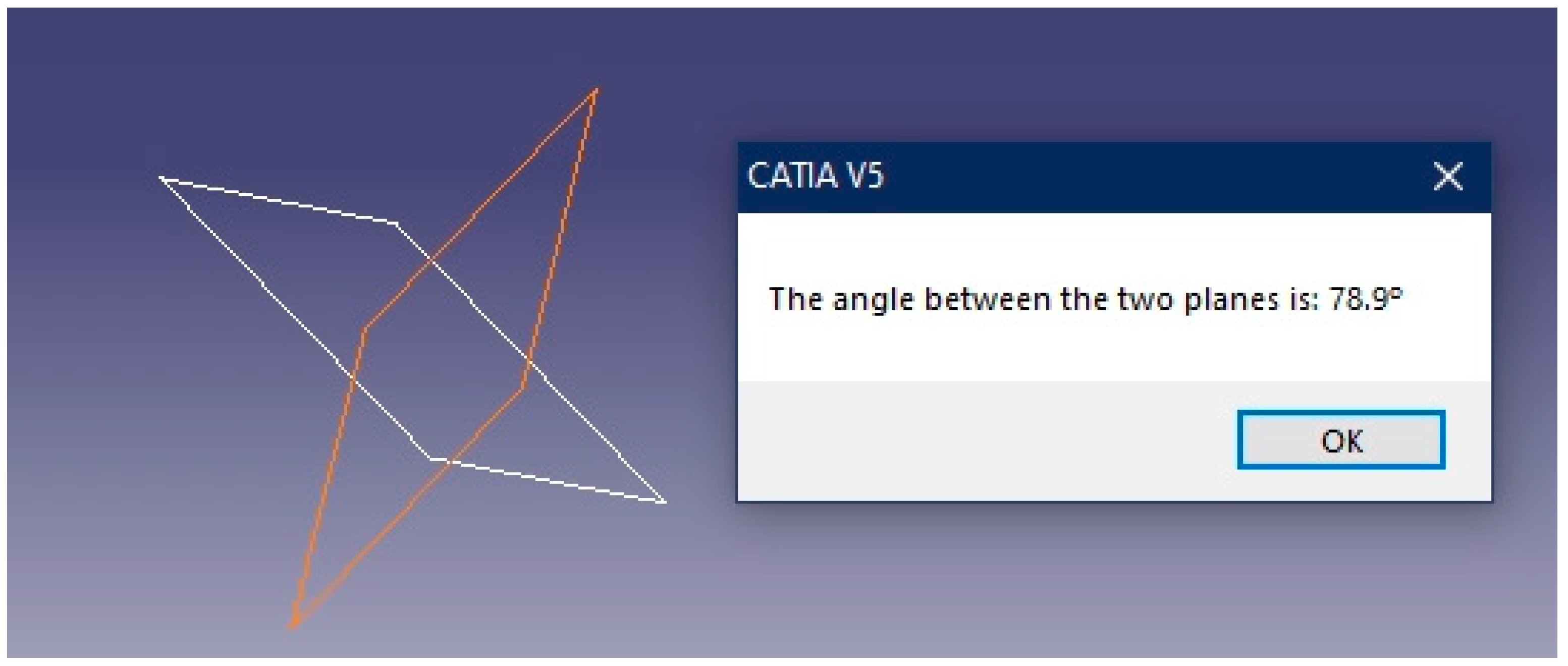
3.4.3. Angle between Two Planes
3.5. Distance Calculation
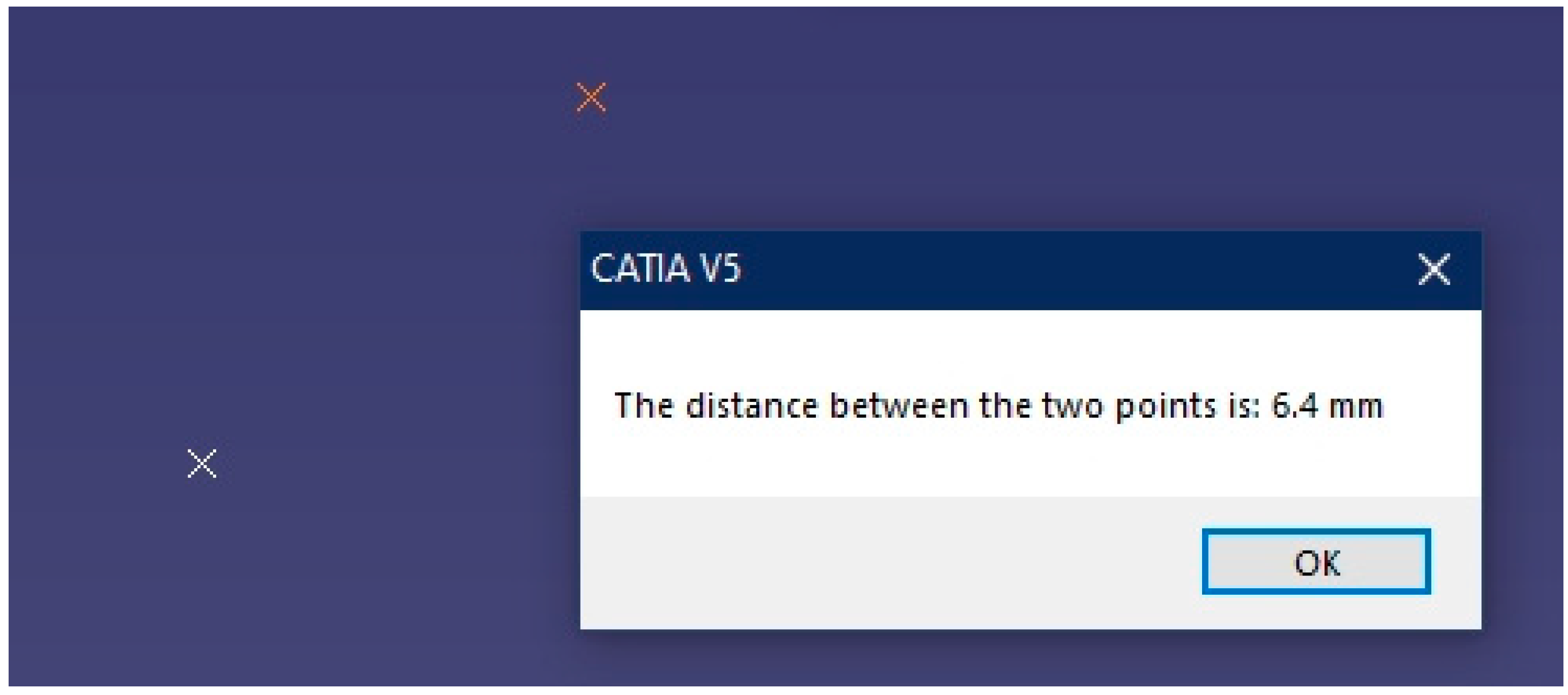
3.5.1. Distance between Two Points
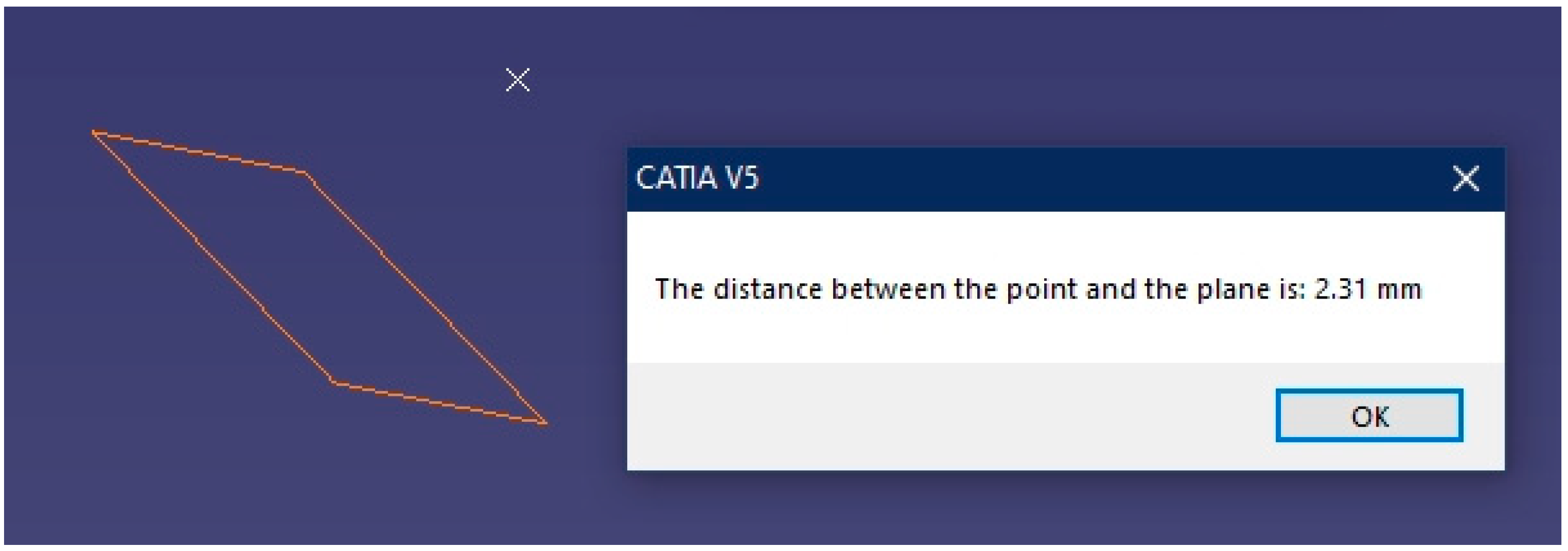
3.5.2. Distance between a Point and a Plane
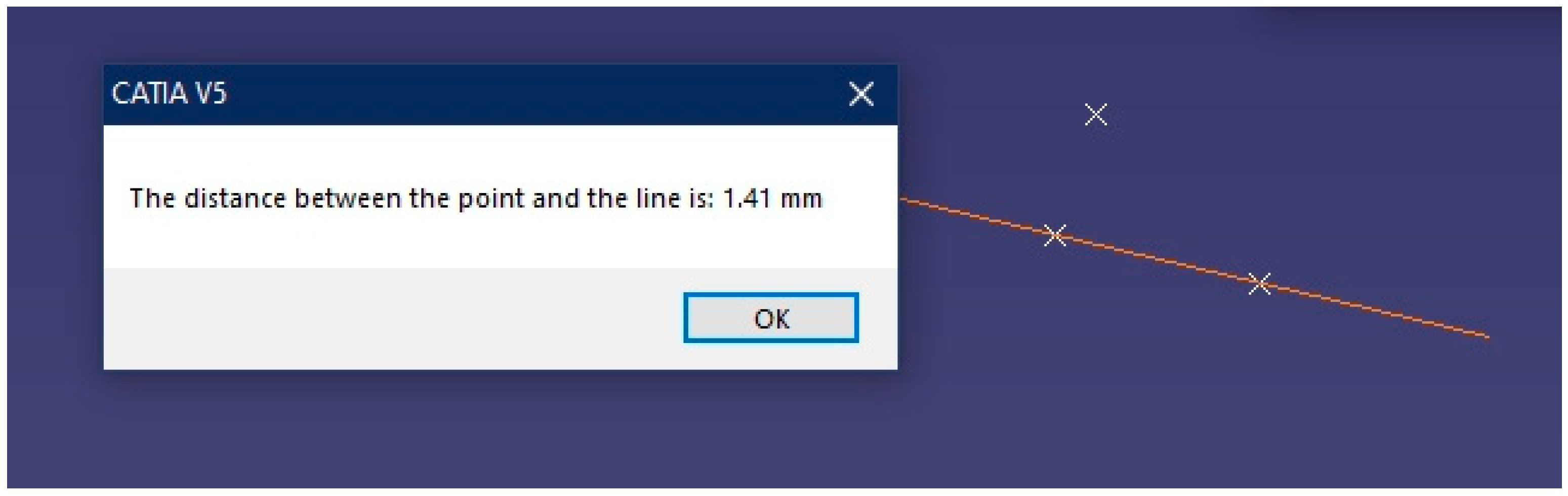
3.5.3. Distance between a Point and a Line
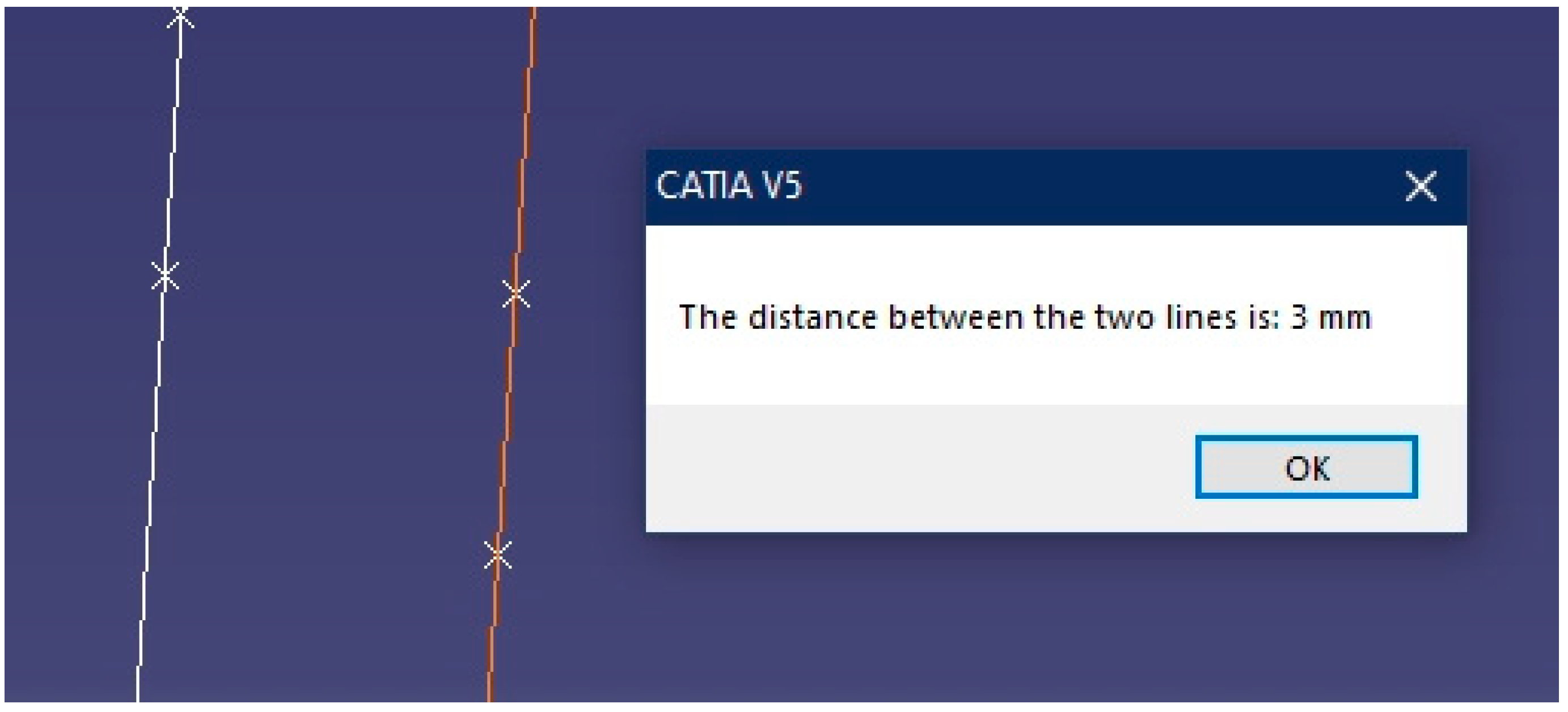
3.5.4. Distance between Two Parallel Lines
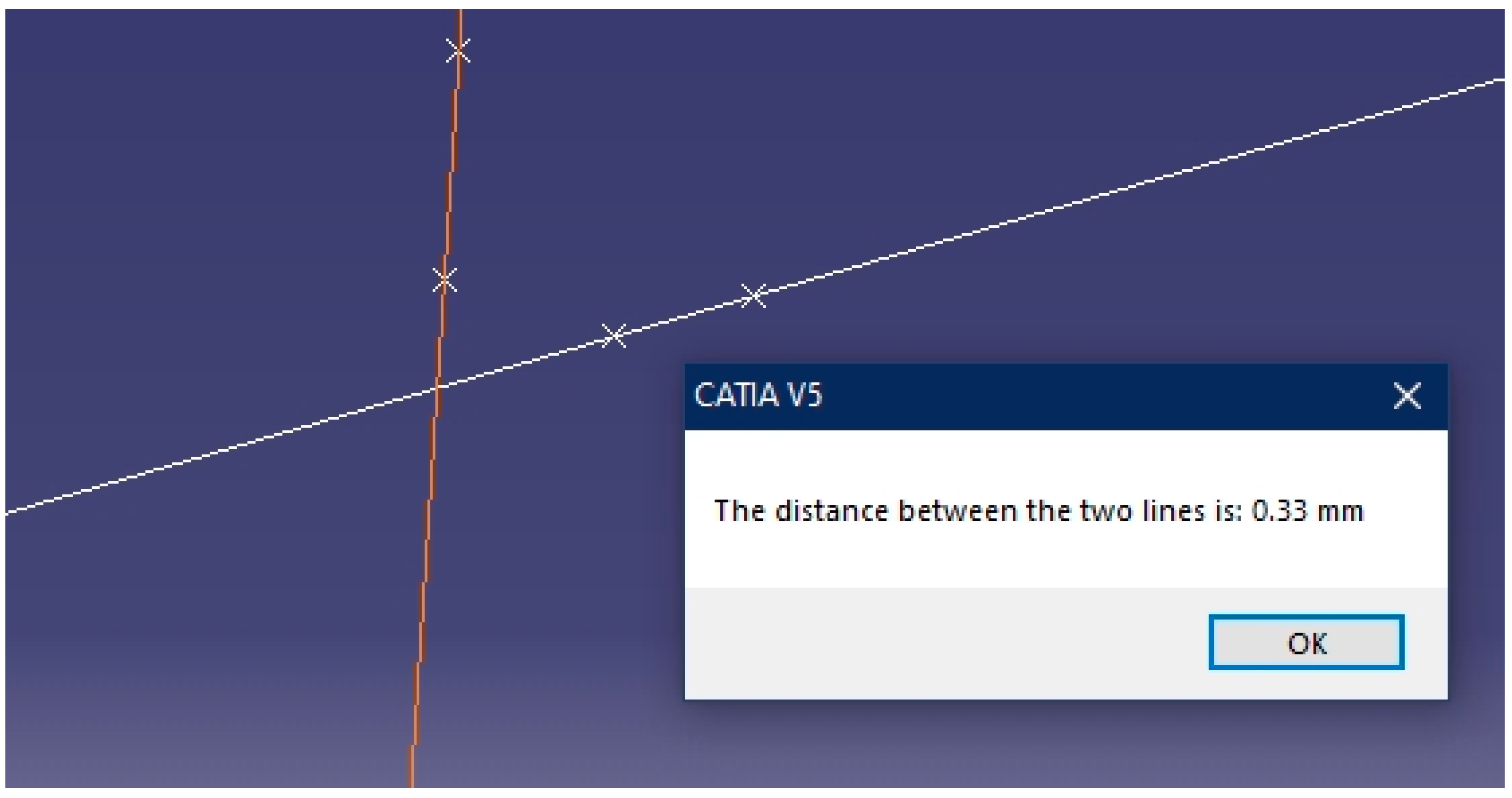
3.5.5. Distance between Two Crossing Lines
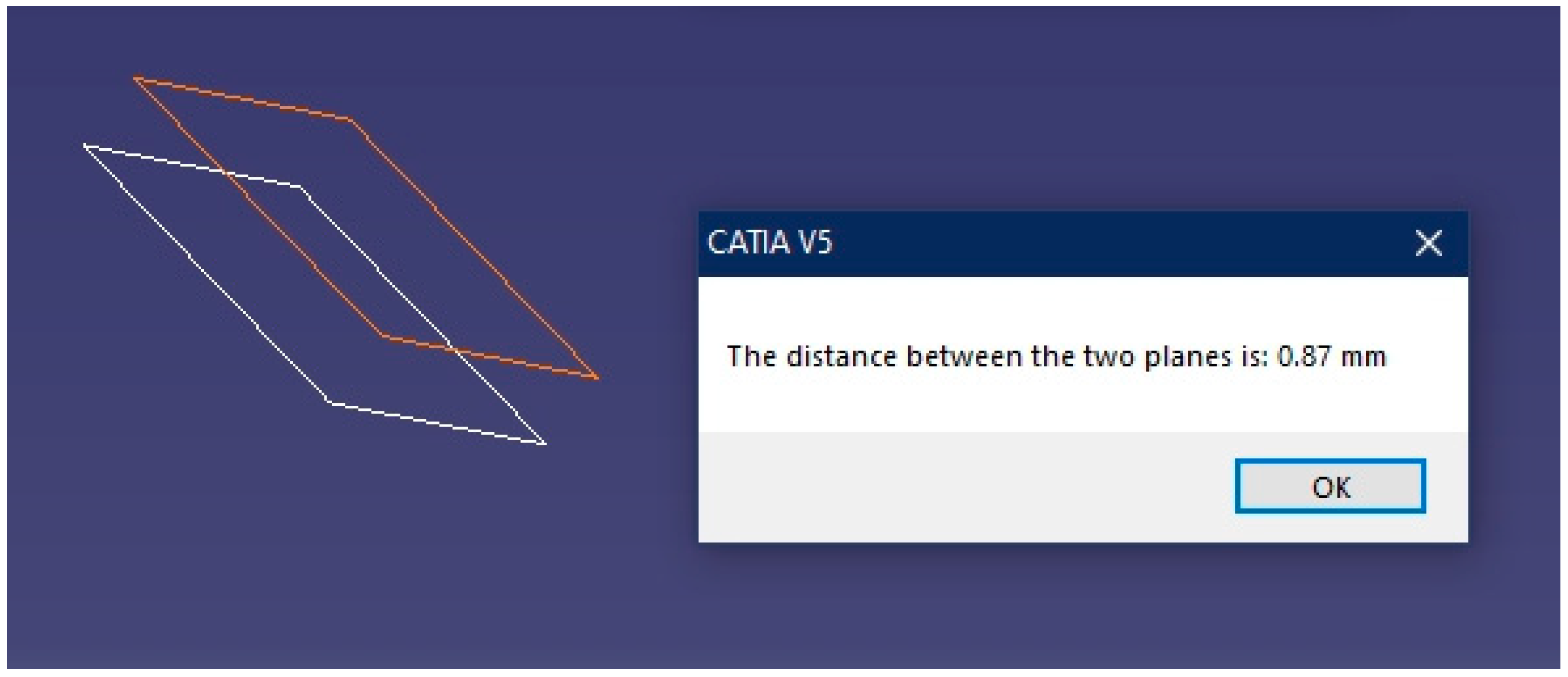
3.5.6. Distance between Two Planes
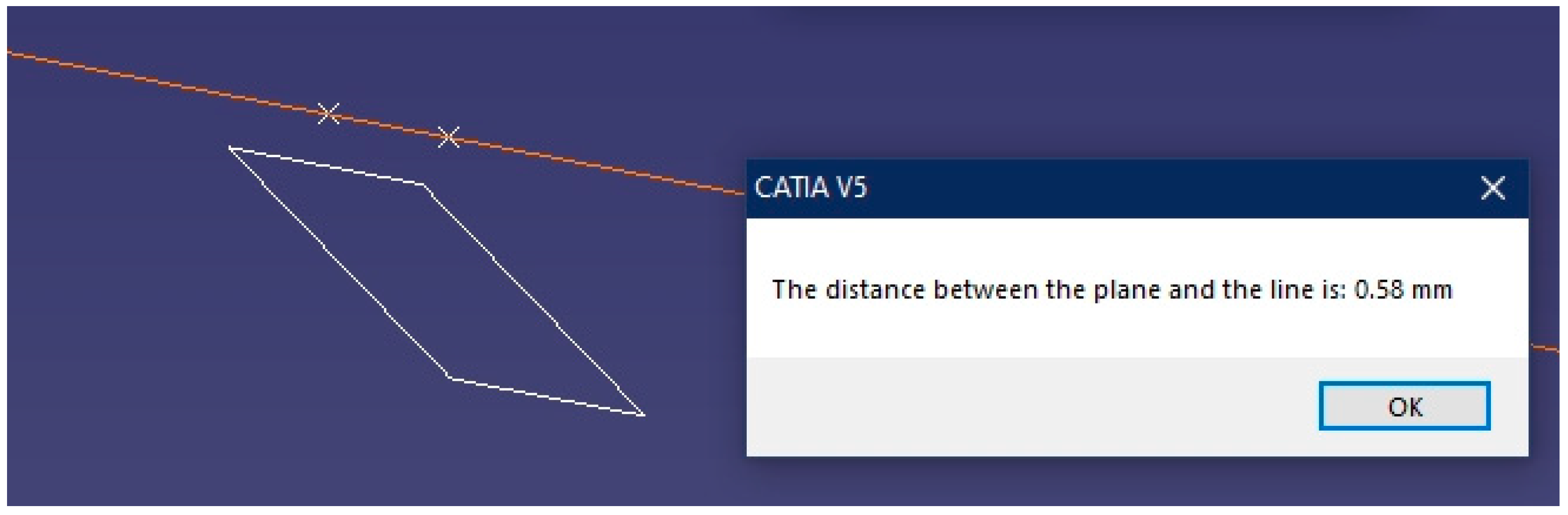
3.5.7. Distance between a Line and a Plane
3.6. Analysis of Errors
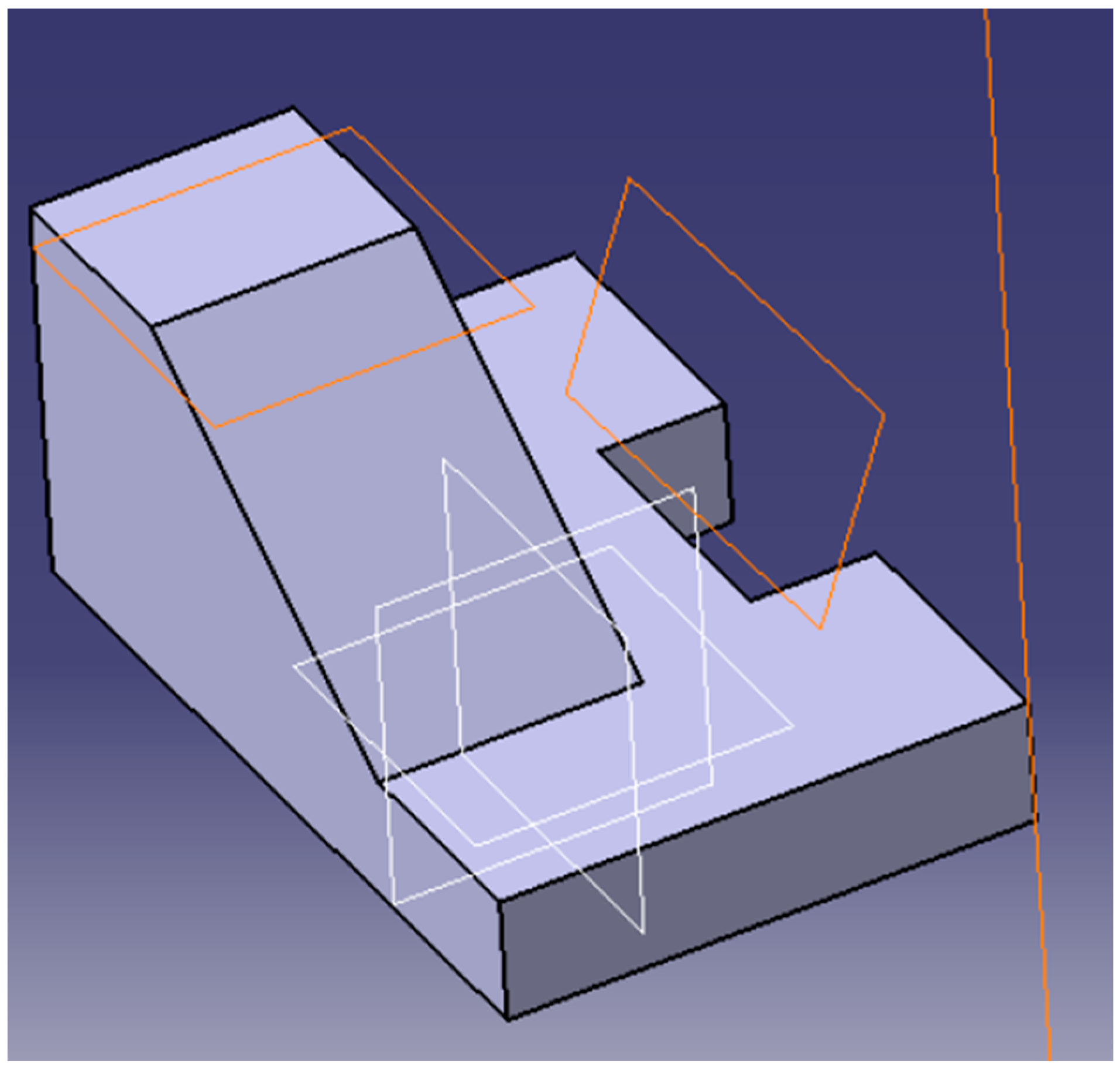
3.7. Integration with Three-Dimensional Solids
4. Conclusions and Future Developments
- The incorporation of new geometric problems that involve curved surfaces, surfaces of revolution, and three-dimensional solids.
- The integration of new operational modules such as intersections between solids or surfaces and their two-dimensional development.
- The representation of the results obtained as dihedral projections utilizing the CATIA V5 “Drafting” module, which would enable problems to be solved in a simple and semi-automatic way.
Author Contributions
Funding
Data Availability Statement
Acknowledgments
Conflicts of Interest
References
- Anton, D.; Amaro-Mellado, J.L. Engineering graphics for thermal assessment: 3D thermal data visualization based on infrared thermography, GIS and 3D point cloud processing software. Symmetry 2021, 13, 335. [Google Scholar] [CrossRef]
- Zhang, Y.H.; Su, B.B. The design and implementation of roadworks management system based on GIS. In Proceedings of the 2nd International Conference on Civil, Architectural and Hydraulic Engineering (ICCAHE 2013), Zhuhai, China, 27–28 July 2013. [Google Scholar]
- Rojas-Sola, J.I.; De la Morena-de la Fuente, E. The Hay inclined plane in Coalbrookdale (Shropshire, England): Geometric modeling and virtual reconstruction. Symmetry 2019, 11, 589. [Google Scholar] [CrossRef] [Green Version]
- Rojas-Sola, J.I.; Hernandez-Diaz, D.; Villar-Ribera, R.; Hernandez-Abad, V.; Hernandez-Abad, F. Computer-Aided Sketching: Incorporating the locus to improve the three-dimensional geometric design. Symmetry 2020, 12, 1181. [Google Scholar] [CrossRef]
- Wellman, B.L. Technical Descriptive Geometry, 2nd ed.; WCB McGraw-Hill: New York, NY, USA, 1987. [Google Scholar]
- Postnikov, M. Analytic Geometry; URSS: Moscow, Russia, 1994. [Google Scholar]
- Giesecke, F.E. Technical Drawing with Engineering Graphics, 14th ed.; Pearson: Harlow, UK, 2014. [Google Scholar]
- Spivak, S.M.; Brenner, F.C. Standardization Essentials: Principles and Practice, 1st ed.; CRC Press: Boca Ratón, FL, USA, 2001. [Google Scholar]
- De Risi, V. (Ed.) Mathematizing Space: The Objects of Geometry from Antiquity to the Early Modern Age; Birkhäuser: Basel, Switzerland, 2015. [Google Scholar]
- Friberg, J. Methods and Traditions of Babylonian Mathematics. Hist. Math. 1981, 8, 277–318. [Google Scholar] [CrossRef] [Green Version]
- Merzbach, U.C.; Boyer, C.B. A History of Mathematics, 3rd ed.; John Wiley & Sons: Hoboken, NJ, USA, 2011. [Google Scholar]
- GEUP3D8. Available online: https://www.geup.net/es/geup3d/index.htm (accessed on 2 February 2023).
- GeoGebra. Available online: https://www.geogebra.org (accessed on 2 February 2023).
- Essen, H.; Svensson, M. Calculation of coordinates from molecular geometric parameters and the concept of a geometric calculator. Comput. Chem. 1996, 20, 389–395. [Google Scholar] [CrossRef]
- Tickoo, S. CATIA V5R21 for Designers; CADCIM Technologies: Schererville, IN, USA, 2014. [Google Scholar]
- Rojas-Sola, J.I.; Del Río-Cidoncha, G.; Ortíz-Marín, R.; López-Pedregal, J.M. Design and development of sheet-metal elbows using programming with visual basic for applications in CATIA. Symmetry 2020, 13, 33. [Google Scholar] [CrossRef]
- Rojas-Sola, J.I.; Del Río-Cidoncha, G.; Ortíz-Marín, R.; Moya-Ocaña, J.A. Design and development of a macro for comparing sections of planes to parts using programming with visual basic for applications in CATIA. Symmetry 2023, 15, 242. [Google Scholar] [CrossRef]
- Ross, E. VB Scripting for CATIA v5: How to Program CATIA Macros; Createspace Independent Pub: Scott Valley, CA, USA, 2012. [Google Scholar]





























{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Type of Problem | Commands |
|---|---|
| Intersection point | AddNewIntersection |
| Line | AddNewLinePtDir AddNewLinePtPt AddNewLineNormal AddNewLineAngle AddNewIntersection AddNewPlaneAngle AddNewPlane2Lines |
| Plane | AddNewPlaneNormal AddNewPlaneAngle AddNewPlane1Line1Pt AddNewPlane2Lines AddNewPlane3Points AddNewPlaneOffsetPt AddNewLinePtPt AddNewIntersection |
| Angle | GetAngleBetween |
| Distance | GetMinimumDistance |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2023 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Rojas-Sola, J.I.; del Río-Cidoncha, G.; Ortíz-Marín, R.; Cebolla-Cano, A. Design and Development of a Geometric Calculator in CATIA. Symmetry 2023, 15, 547. https://doi.org/10.3390/sym15020547
Rojas-Sola JI, del Río-Cidoncha G, Ortíz-Marín R, Cebolla-Cano A. Design and Development of a Geometric Calculator in CATIA. Symmetry. 2023; 15(2):547. https://doi.org/10.3390/sym15020547
Chicago/Turabian StyleRojas-Sola, José Ignacio, Gloria del Río-Cidoncha, Rafael Ortíz-Marín, and Andrés Cebolla-Cano. 2023. "Design and Development of a Geometric Calculator in CATIA" Symmetry 15, no. 2: 547. https://doi.org/10.3390/sym15020547
APA StyleRojas-Sola, J. I., del Río-Cidoncha, G., Ortíz-Marín, R., & Cebolla-Cano, A. (2023). Design and Development of a Geometric Calculator in CATIA. Symmetry, 15(2), 547. https://doi.org/10.3390/sym15020547