
A Coupling Optimization Method of Vehicle Structure and Restraint System for Occupant Injury Protection in Traffic Accidents




Abstract
:1. Introduction
2. Fast Solution Algorithm for a Vehicle—Occupant Crash Analytical Model
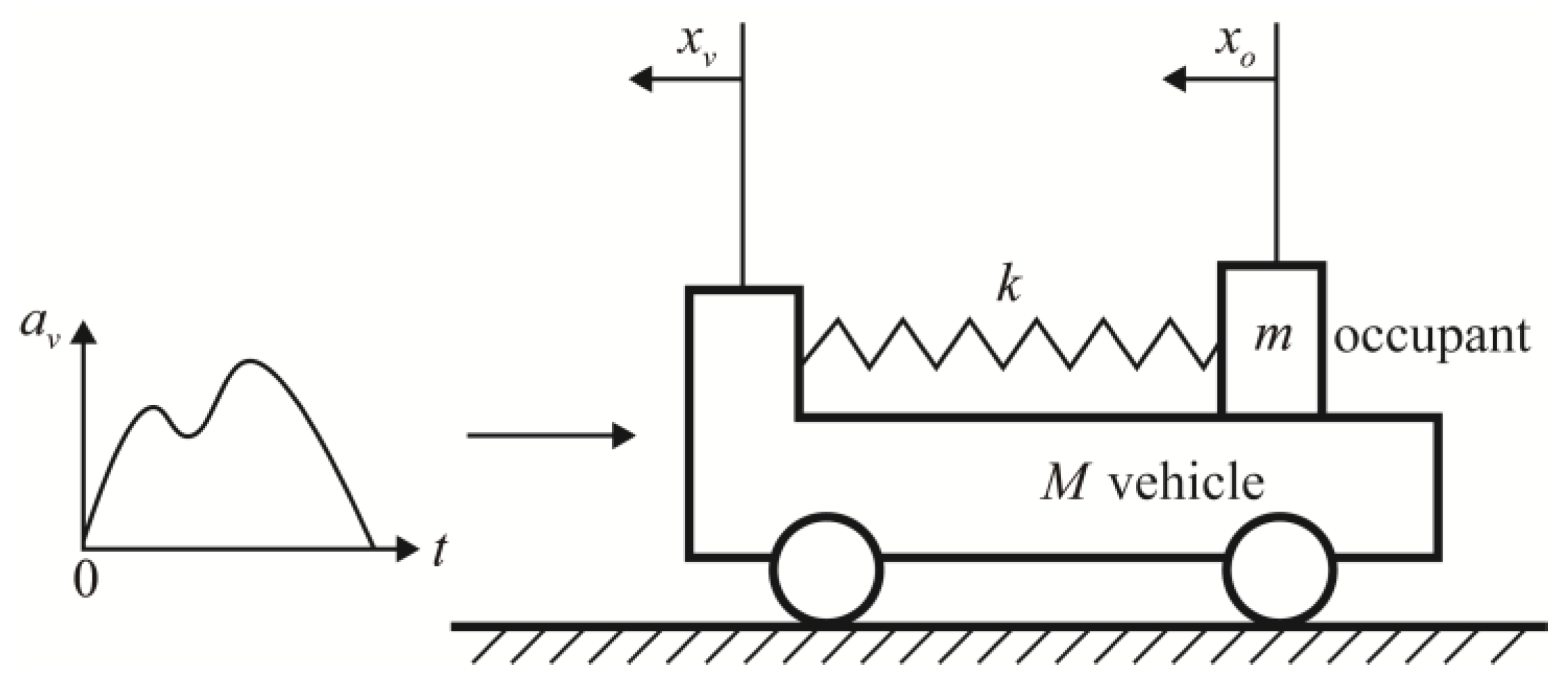
2.1. Vehicle–Occupant Crash Analytical Model
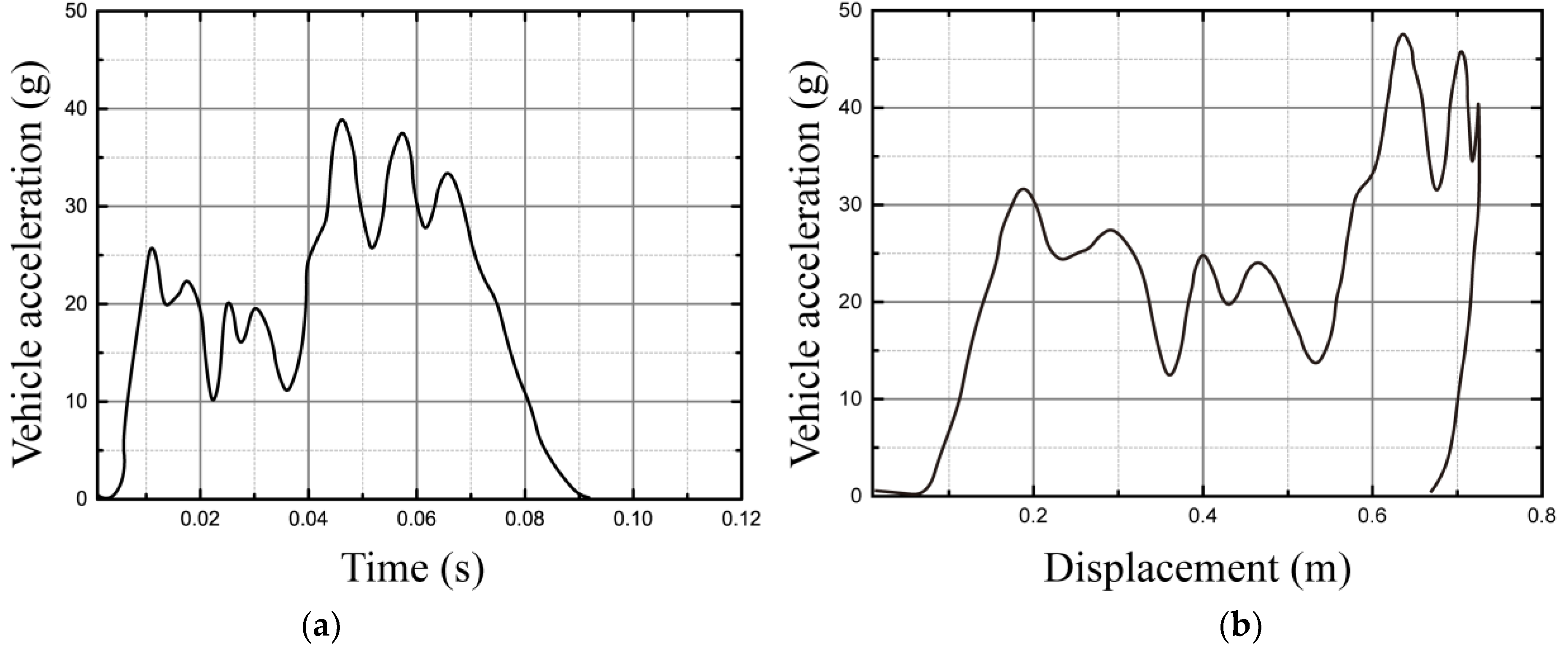
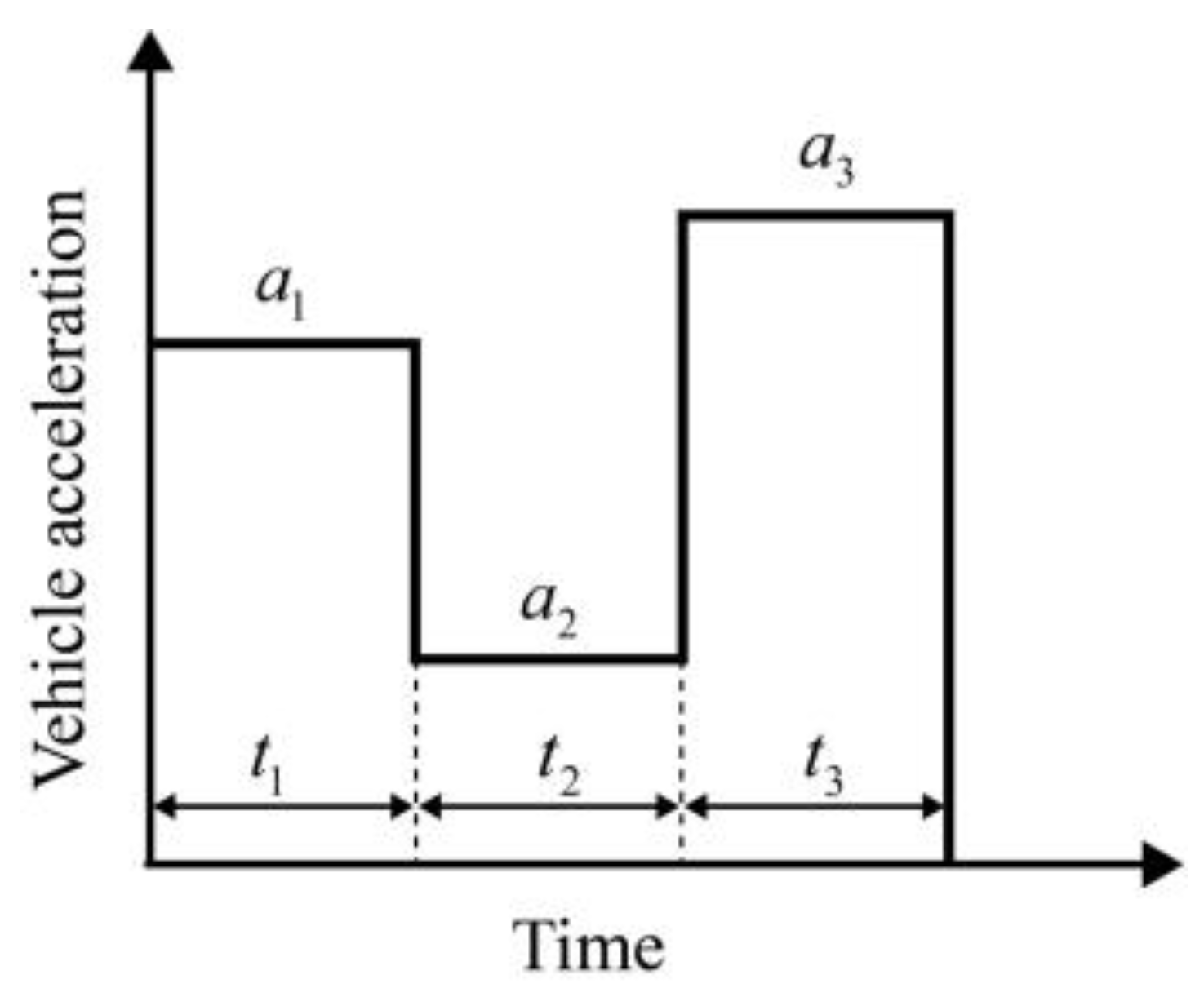
2.2. The Approximation of Vehicle Crash Pulse
- 1.
- The integral of the simplified pulse in time domain equals the initial crash velocity of the vehicle.
- 2.
- The vehicle decelerates from the initial crash speed to zero, the time remains unchanged.
- 3.
- The displacement obtained by simplified pulse equals the maximum deformation displacement of the vehicle .
- 4.
- The integral of the simplified crash pulse in the displacement domain equals the total energy absorption of vehicle in the crash, which is the initial kinetic energy of the vehicle.
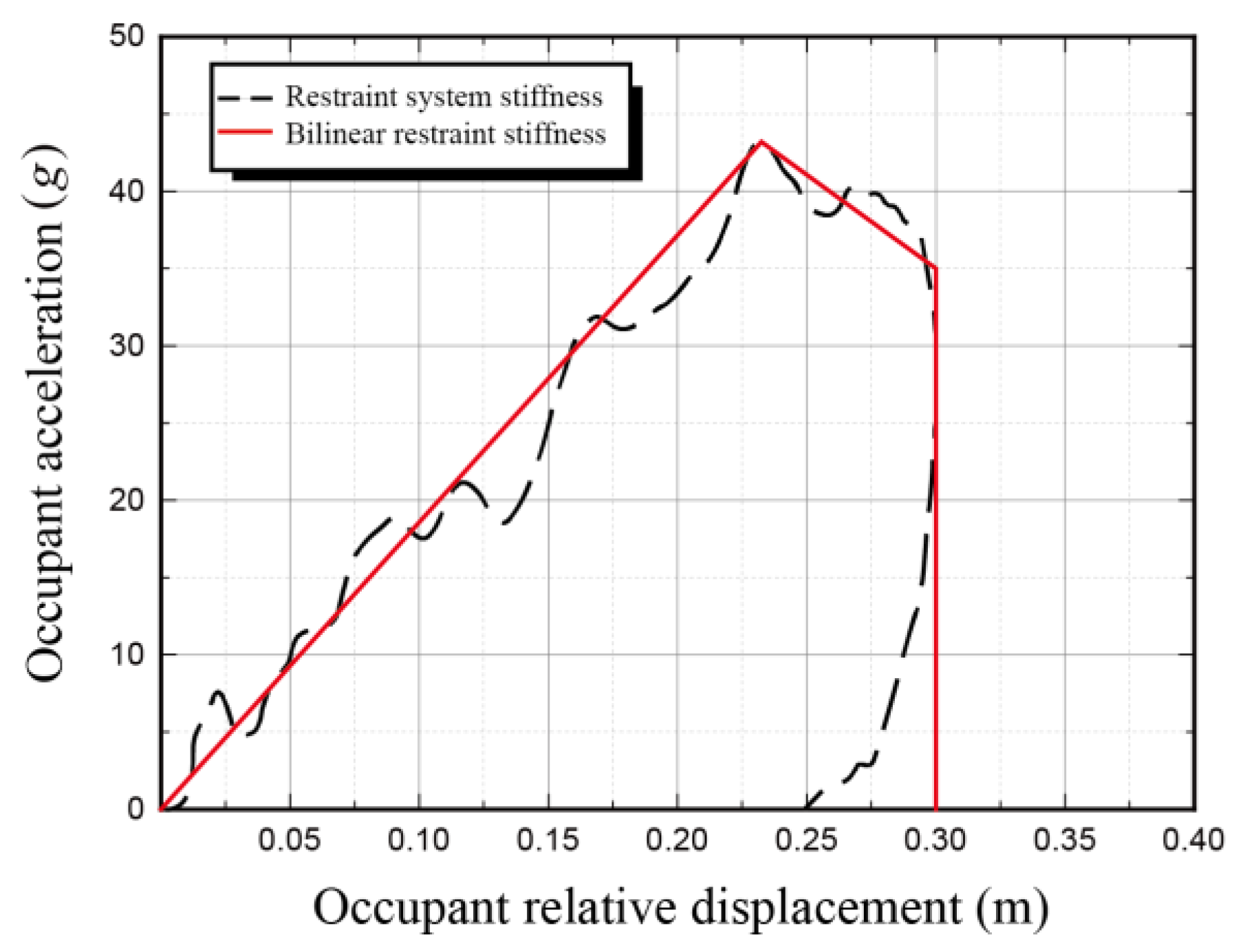
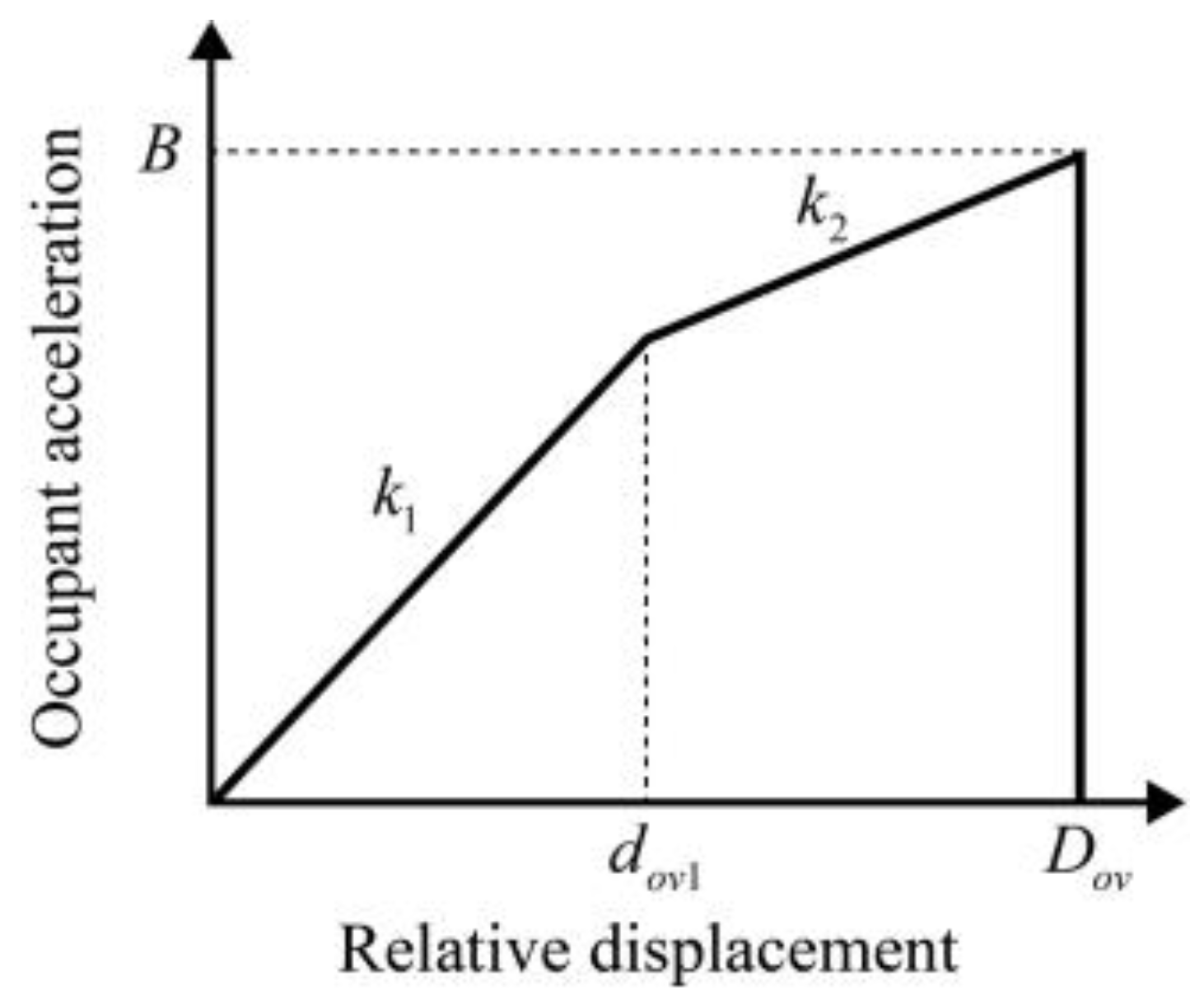
2.3. The Approximation of Occupant Restraint Stiffness
- (1)
- The maximum relative displacement of the occupant Dov remains unchanged.
- (2)
- The energy absorbed by the ORS remains unchanged.
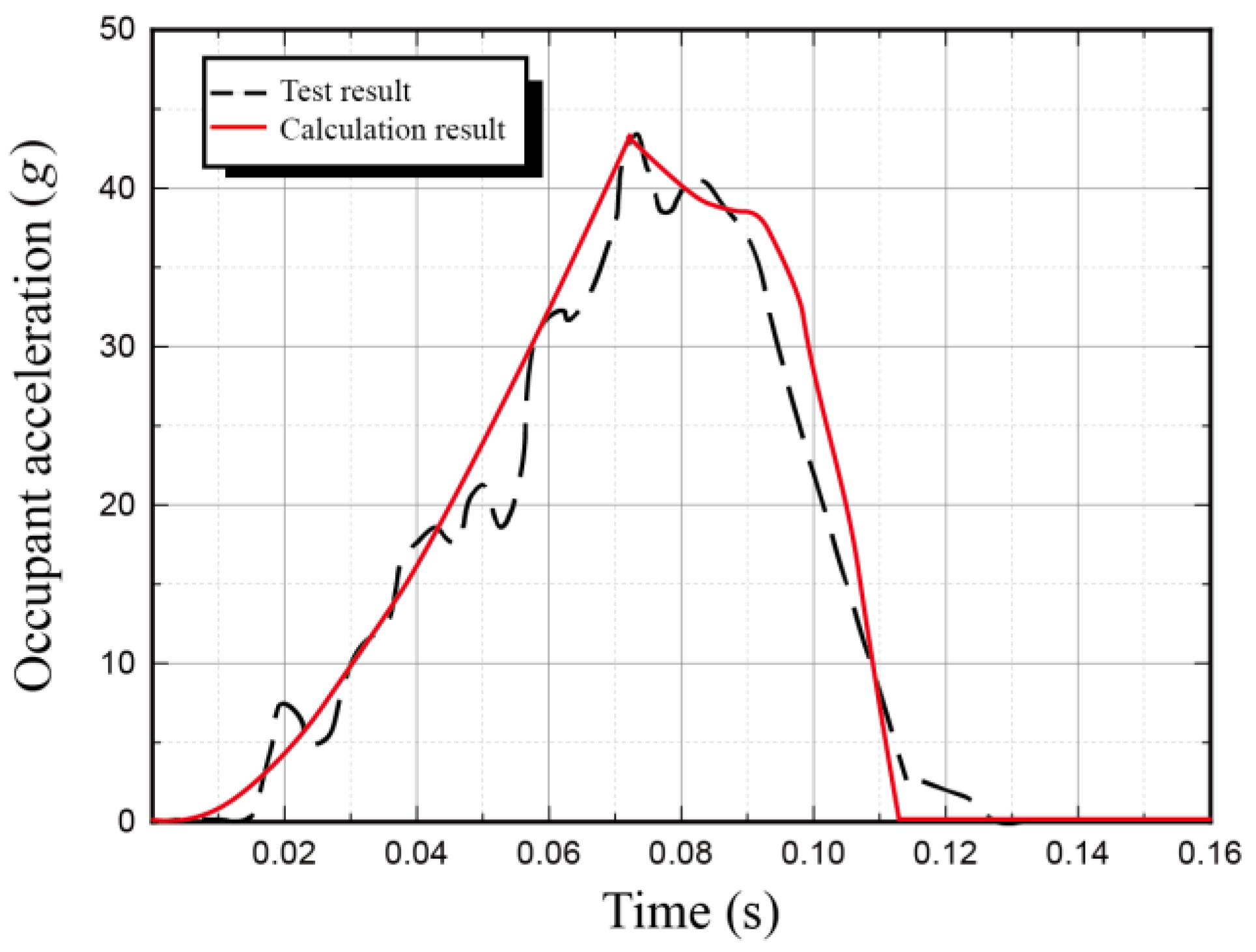
2.4. Fast Solution Algorithm of Occupant Response
3. Analysis of the Coupling Relationship between Crash Pulse and Restraint Stiffness
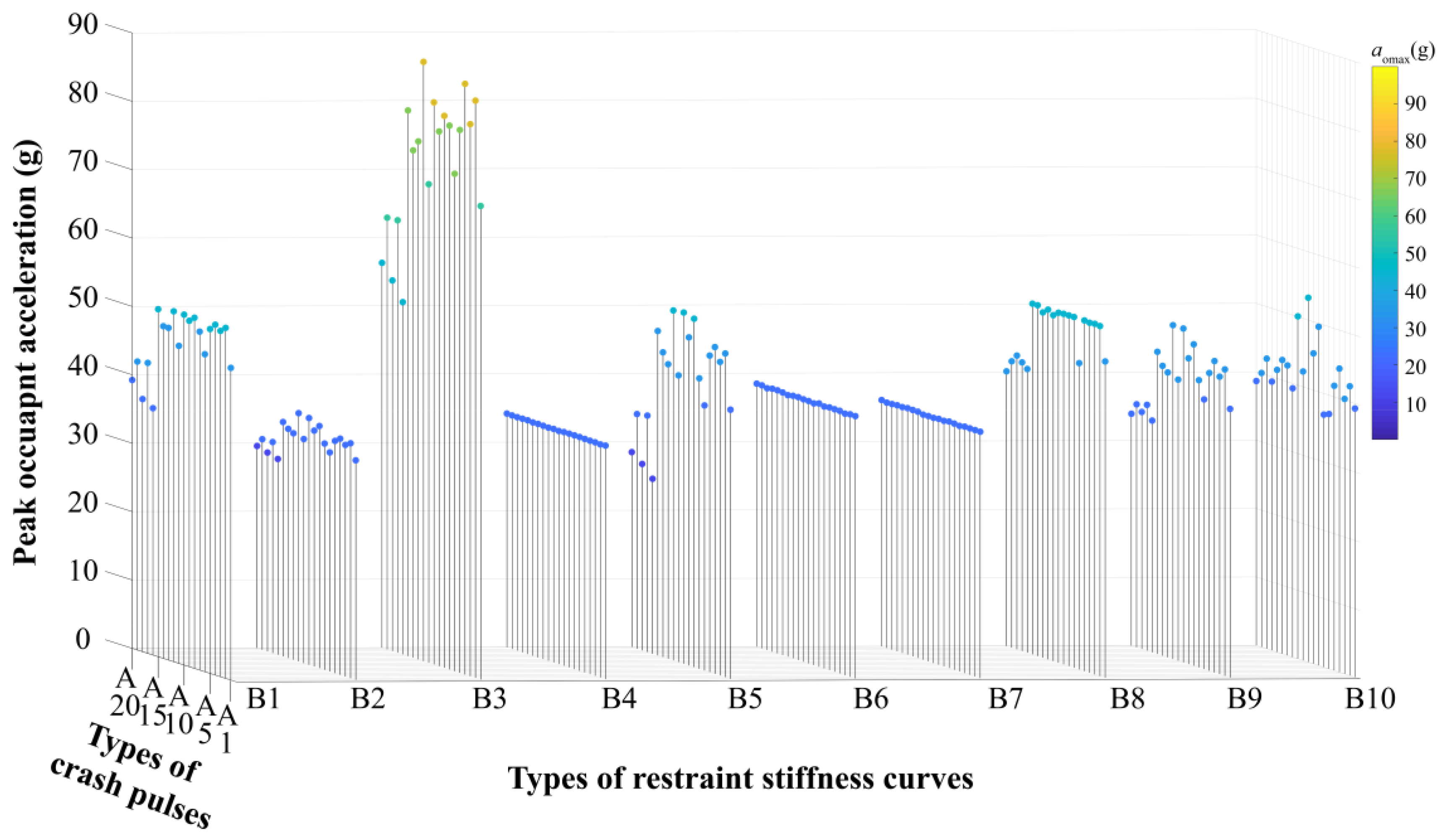
3.1. Occupant Response Database
3.2. Qualitative Analysis
4. Coupling Optimization Design of Crash Pulse and Restraint Stiffness
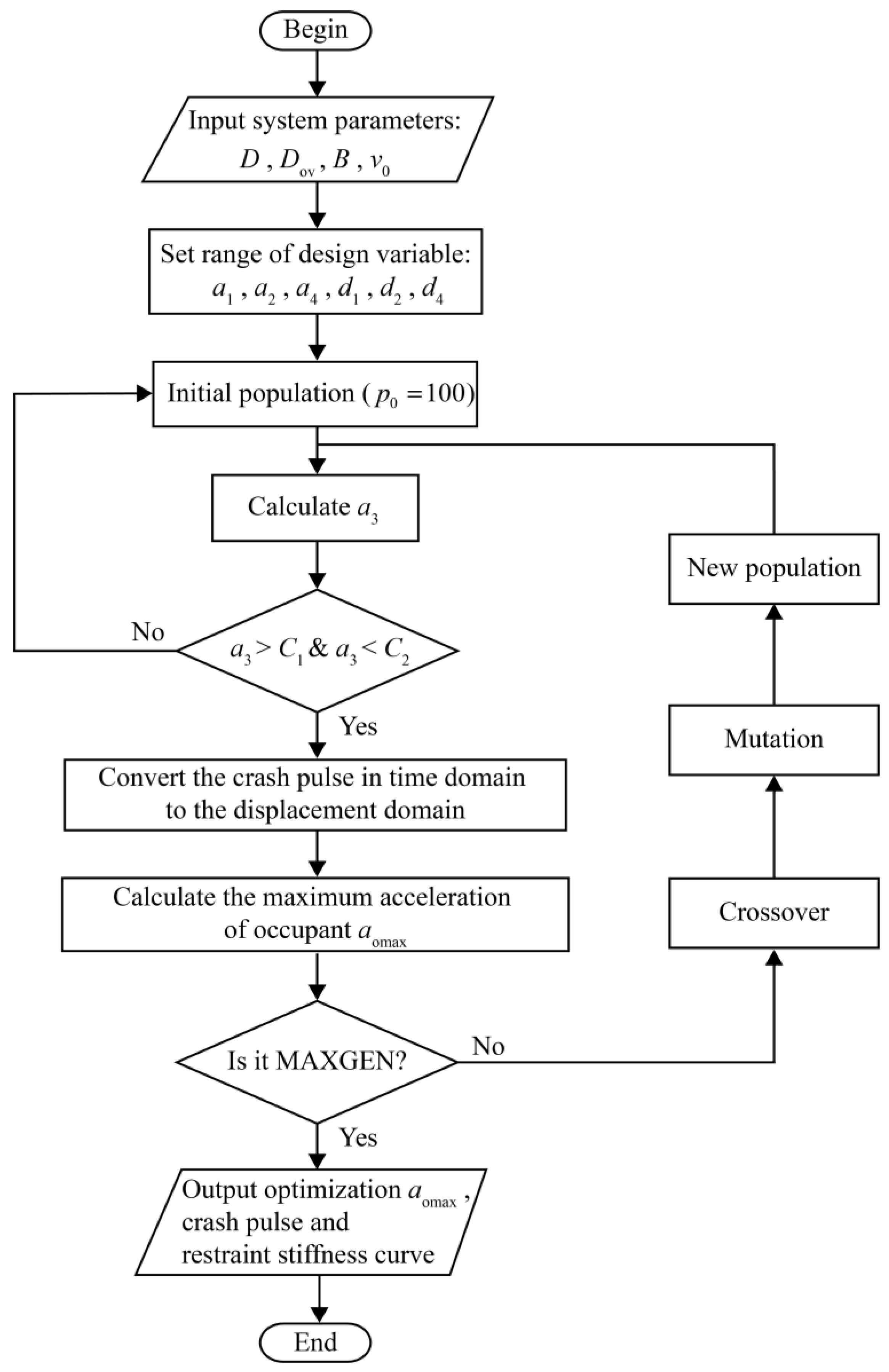
4.1. Coupling Optimization Method
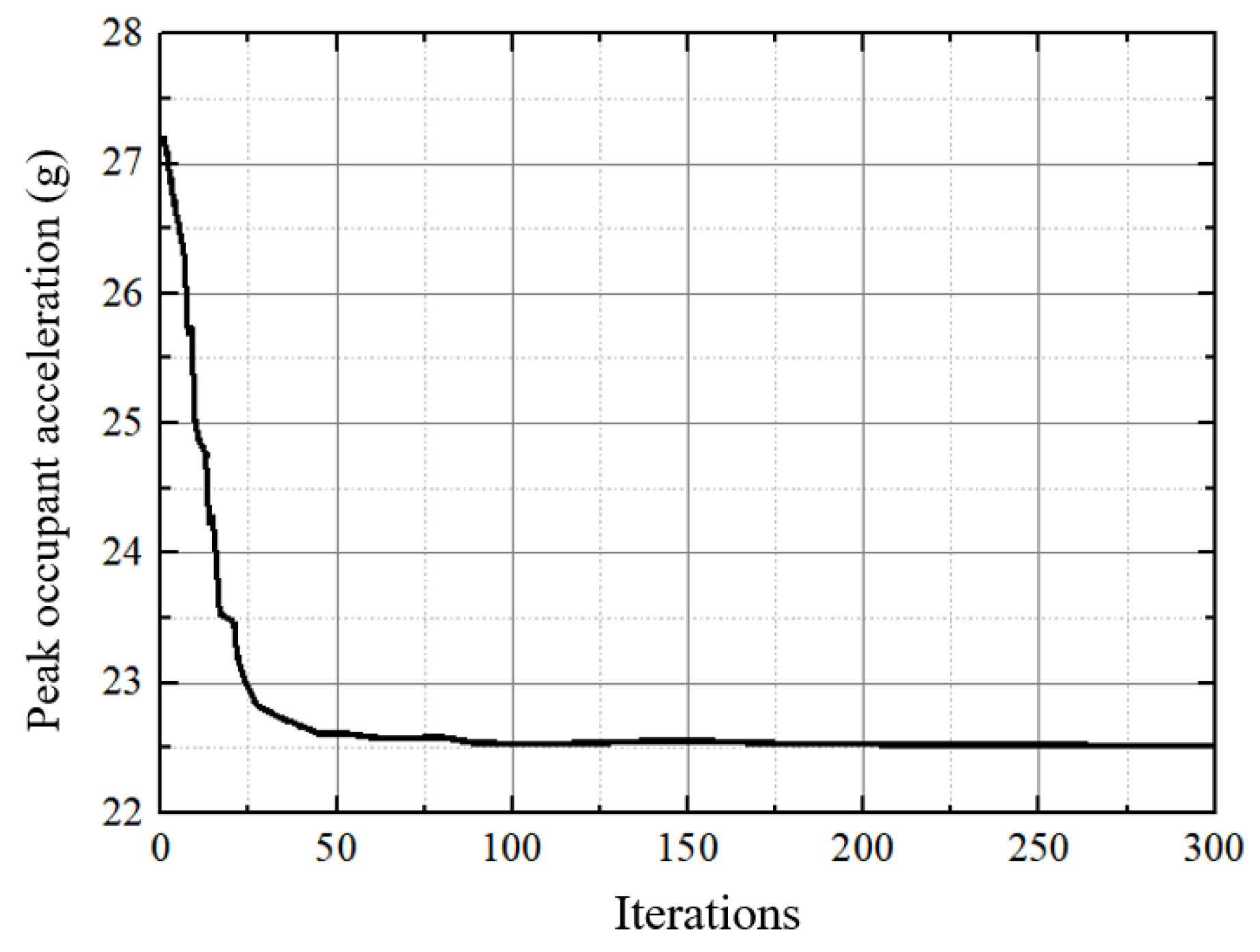
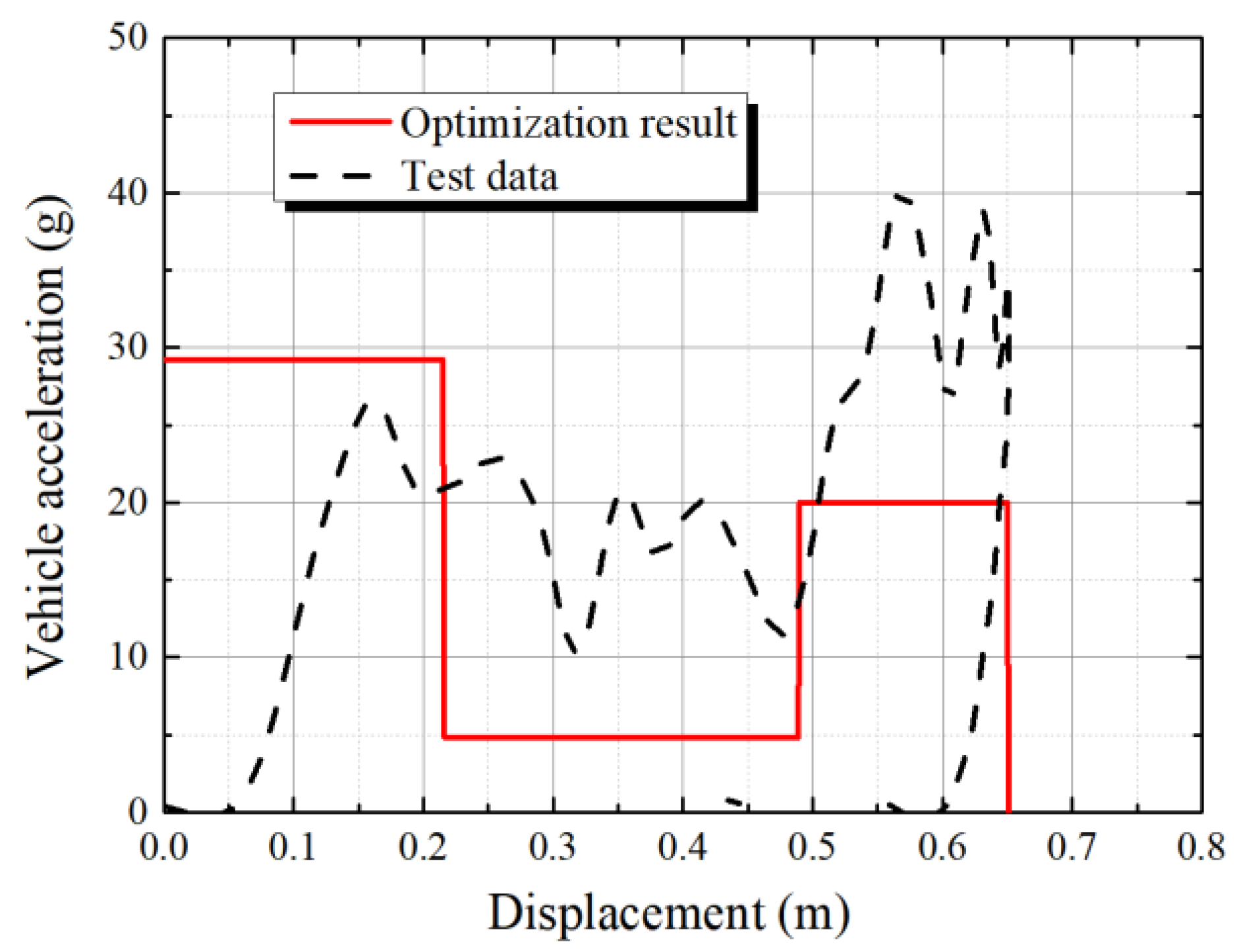
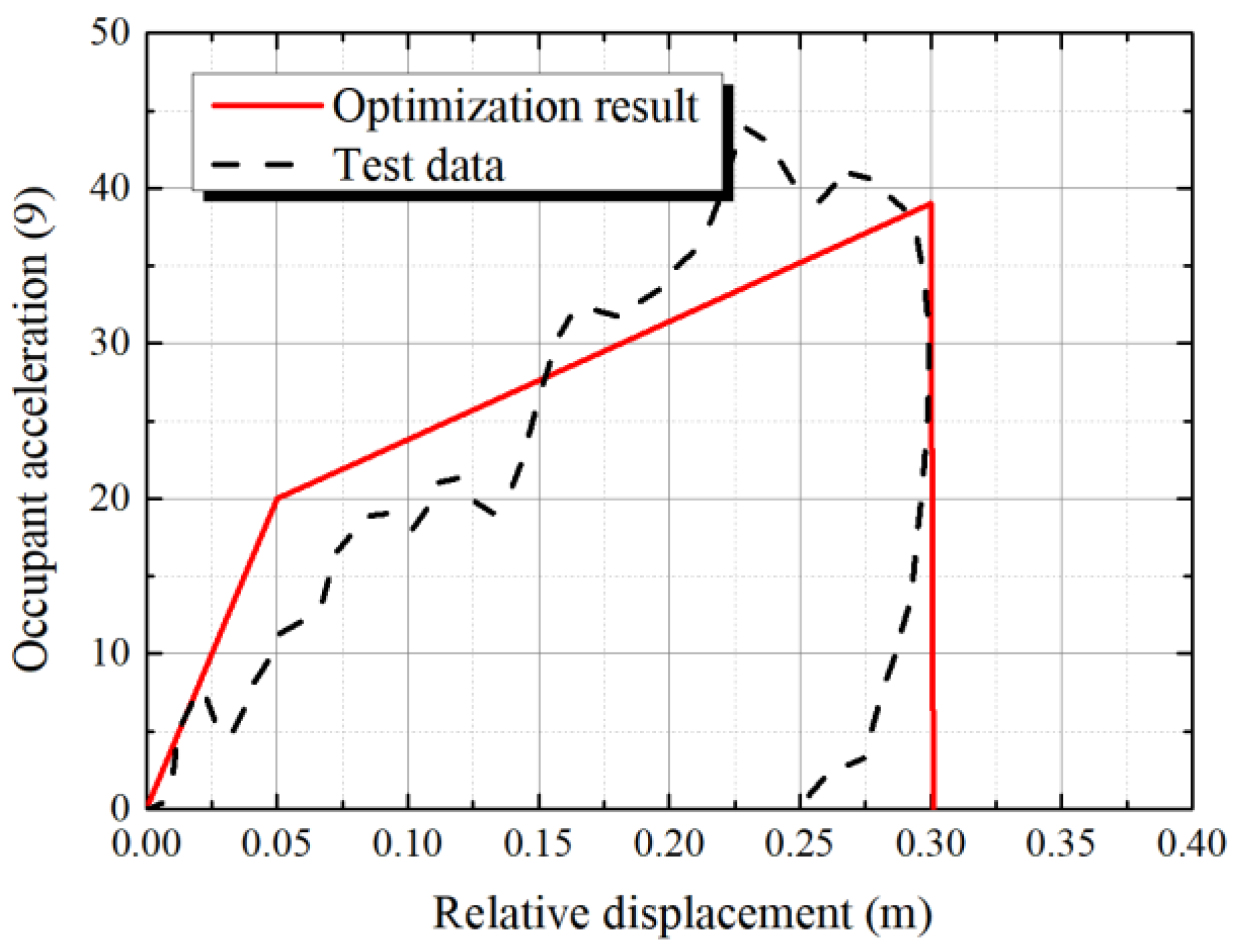
4.2. Optimization Example
5. Discussion
6. Conclusions
- (1)
- For a crash pulse, the pulse shape is more important than the pulse parameters, and the quality of the concave pulse, rectangular pulse, upward pulse, convex pulse, and downward pulse decreases successively.
- (2)
- For the restraint stiffness curve, the peak value of the curve is closely related to the peak occupant acceleration. When the peak value is the same, the quality of the restraint stiffness curve for an upward curve, convex curve, and concave curve decreases successively.
- (3)
- The crash pulse and restraint stiffness curve of a vehicle was optimized using the proposed coupling optimization method, and the peak occupant acceleration was decreased by 44%.
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Acknowledgments
Conflicts of Interest
References
- Dima, D.; Covaciu, D. Vehicles Frontal Impact Analysis Using Computer Simulation and Crash Test. Int. J. Automot. Technol. 2019, 20, 655–661. [Google Scholar] [CrossRef]
- Zhang, H.; Peng, Y.; Hou, L.; Wang, D.; Tian, G.; Li, Z. Multistage impact energy distribution for whole vehicles in high-speed train collisions: Modeling and solution methodology. IEEE Trans. Ind. Inform. 2020, 16, 2486–2499. [Google Scholar] [CrossRef]
- Hu, L.; Zhou, X.; Zhang, X.; Wang, F.; Li, Q.; Wu, W. A review on key challenges in intelligent vehicles: Safety and driver-oriented features. IET Intell. Transp. Syst. 2021, 15, 1093–1105. [Google Scholar] [CrossRef]
- Zou, T.; Shang, S.; Simms, C. Potential benefits of controlled vehicle braking to reduce pedestrian ground contact injuries. Accid. Anal. Prev. 2019, 129, 94–107. [Google Scholar] [CrossRef] [PubMed]
- Hu, L.; Tian, Q.; Zou, C.; Huang, J.; Ye, Y.; Wu, X. A study on energy distribution strategy of electric vehicle hybrid energy storage system considering driving style based on real urban driving data. Renew. Sustain. Energy Rev. 2022, 162, 112416. [Google Scholar] [CrossRef]
- Wang, F.; Yin, J.; Hu, L.; Wang, M.; Liu, M.; Miller, K.; Wittek, A. Should anthropometric differences between the commonly used pedestrian computational biomechanics models and Chinese population be taken into account when predicting pedestrian head kinematics and injury in vehicle collisions in China? Accid. Anal. Prev. 2022, 173, 106718. [Google Scholar] [CrossRef]
- Wang, F.; Wu, J.; Hu, L.; Yu, C.; Wang, B.; Huang, X.; Miller, K.; Wittek, A. Evaluation of the Head Protection Effectiveness of Cyclist Helmets Using Full-Scale Computational Biomechanics Modelling of Cycling accidents. J. Saf. Res. 2022, 80, 109–134. [Google Scholar] [CrossRef]
- Peng, Y.; Li, T.; Bao, C.; Zhang, J.; Xie, G.; Zhang, H. Performance analysis and multi-objective optimization of bionic dendritic furcal energy-absorbing structures for trains. Int. J. Mech. Sci. 2023, 246, 108145. [Google Scholar] [CrossRef]
- Khalil, T.B.; Sheh, M.Y. Vehicle crashworthiness and occupant protection in frontal impact by FE analysis—An integrated approach. In Crashworthiness of Transportation Systems: Structural Impact and Occupant Protection; Springer: Cham, Switzerland, 1997; pp. 363–399. [Google Scholar]
- Kim, O.S.; Kim, S.T.; Jung, S.B.; Kim, D.S. Sub-structure vehicle test and analysis to predict the frontal crash performances of full-scale vehicle. In Proceedings of the International Congress & Exposition, Detroit, MI, USA, 1–4 March 1999. SAE Technical Paper. [Google Scholar]
- Qin, H.; Liu, Z.; Zhong, H.; Liu, Y.; Lv, C. Two-level multiple cross-sectional shape optimization of automotive body frame with exact static and dynamic stiffness constraints. Struct. Multidiscip. Optim. 2018, 58, 2309–2323. [Google Scholar] [CrossRef]
- Szlosarek, R.; Bombis, F.; Muhler, M.; Kroger, M.; Karall, T. Development of carbon fibre-reinforced plastic (CFRP) crash absorbers with stable crushing behaviour considering the connection to the bumper system. Mater. Werkst. 2016, 47, 1099–1108. [Google Scholar] [CrossRef]
- Zhang, L.; Bai, Z.; Bai, F. Crashworthiness design for bio-inspired multi-cell tubes with quadrilateral, hexagonal and octagonal sections. Thin-Walled Struct. 2018, 122, 42–51. [Google Scholar] [CrossRef]
- Teng, T.; Chang, P.; Liang, C.; Fung, D. Application of crash pulse on the car crashworthiness design. Adv. Mech. Eng. 2017, 9, 1–8. [Google Scholar] [CrossRef] [Green Version]
- Cheng, B.; Fu, H.; Li, T.; Zhang, H.; Huang, J.; Peng, Y.; Chen, H.; Fan, C. Evolutionary computation-based multitask learning network for railway passenger comfort evaluation from EEG signals. Appl. Soft Comput. 2023, 139, 110079. [Google Scholar] [CrossRef]
- Kuznetcov, A.; Telichev, I. Effect of acceleration pulse shape on the safety of unbelted motorcoach passengers in frontal collision under uncertainty of their seating posture. Int. J. Crashworthiness 2020, 25, 231–241. [Google Scholar] [CrossRef]
- Iraeus, J.; Lindquist, M. Analysis of minimum pulse shape information needed for accurate chest injury prediction in real life frontal crashes. Int. J. Crashworthiness 2021, 26, 684–691. [Google Scholar] [CrossRef]
- Ito, D.; Yokoi, Y.; Mizuno, K. Crash Pulse Optimization for Occupant Protection at Various Impact Velocities. Traffic Inj. Prev. 2015, 16, 260–267. [Google Scholar] [CrossRef]
- Urbina, P.; Orta, P.; Ahuett-Garza, H. Crashworthiness design based on a simplified deceleration pulse. Int. J. Automot. Technol. 2014, 15, 909–917. [Google Scholar] [CrossRef]
- Boyle, K.; Fanta, A.; Reed, M.; Fischer, K.; Smith, A.; Adler, A.; Hu, J. Restraint systems considering occupant diversity and pre-crash posture. Traffic Inj. Prev. 2020, 21, S31–S36. [Google Scholar] [CrossRef]
- Huang, Y.; Ji, P.; Zhou, Q. Re-optimisation of occupant restraint system for Chinese statures by reducing airbag inflator power. Int. J. Veh. Des. 2018, 77, 67–86. [Google Scholar] [CrossRef]
- Liufu, K.; Liu, Q.; Lu, Y.; Chen, Z.; Zhang, Z.; Li, Q. Multiobjective optimization on cooperative control of autonomous emergency steering and occupant restraint system for enhancing occupant safety. Accid. Anal. Prev. 2021, 159, 106302. [Google Scholar] [CrossRef]
- Wang, Q.; Liu, Z.; Cao, L.; Xiao, Z.; Zhang, Q.; Zhang, S. Multiobjective optimization design for an occupant restraint system considering interval correlation. Struct. Multidiscip. Optim. 2022, 65, 303. [Google Scholar] [CrossRef]
- Zhou, D.; Wang, X.; Zheng, Q.; Fu, T.; Wu, M.; Sun, X. A nonlinear occupant-restraint system model for predicting human injuries caused by vertical impact. Nonlinear Dyn. 2021, 105, 3093–3115. [Google Scholar] [CrossRef]
- Huang, M. Vehicle Crash Mechanics; CRC Press: Boca Raton, FL, USA, 2002. [Google Scholar]
- Motozawa, Y.; Kamei, T. A new concept for occupant deceleration control in a crash. SAE Trans. 2000, 109, 1502–1509. [Google Scholar]
- Wu, J.; Bilkhu, S.; Nusholtz, G.S. An impact pulse-restraint energy relationship and its applications. SAE Trans. 2003, 112, 517–532. [Google Scholar]
- Cheng, Z.; Pellettiere, J.A.; Crandall, J.R.; Pilkey, W.D. Optimal occupant kinematics and crash pulse for automobile frontal impact. Shock Vib. 2009, 16, 61–73. [Google Scholar] [CrossRef]
- Mizuno, K.; Itakura, T.; Hirabayashi, S.; Tanaka, E.; Ito, D. Optimization of vehicle deceleration to reduce occupant injury risks in frontal impact. Traffic Inj. Prev. 2014, 15, 48–55. [Google Scholar] [CrossRef]
- Witteman, W. Adaptive frontal structure design to achieve optimal deceleration pulses. In Proceedings of the 19th International Technical Conference on the Enhanced Safety of Vehicles, Washington, DC, USA, 6–9 June 2005. Paper 05-0243. [Google Scholar]
- Witteman, W.J.; Kriens, R.F.C. The necessity of an adaptive vehicle structure to optimize deceleration pulses for different crash velocities. In Proceedings of the International Technical Conference on Enhanced Safety of Vehicles, Amsterdam, The Netherlands, June 4–7 2001. SAE Technical Paper. [Google Scholar]
- Qiu, S.; Li, H.; Zhang, J.; Ma, Y.; Hao, Y. Optimized ride-down rate control in frontal impact and its application in the energy management of occupant restraint system. In Proceedings of the SAE 2013 World Congress & Exhibition, Detroit, MI, USA, 16–18 April 2013. SAE Technical Paper. [Google Scholar]
- Zhang, J.; Wang, D.; Jin, Y.; Wu, L.; Zhou, H. The vehicle frontal impact safety evaluation and design method based on the coupling effect between crash pulse and restraint system characteristic. Int. J. Veh. Des. 2018, 78, 79–107. [Google Scholar] [CrossRef]
- Zhang, J.; Ma, Y.; Chen, C.; Zhang, Y. Design and Optimization for the Occupant Restraint System of Vehicle Based on a Single Freedom Model. Chin. J. Mech. Eng. 2013, 26, 492–497. [Google Scholar] [CrossRef]
- Zhang, J. Parameters Design Method for Structure and Occupant Restraint System in Vehicle Crash; Science Press: Beijing, China, 2018. [Google Scholar]
- Kent, R.W.; Forman, J. Restraint system biomechanics. In Accidental Injury; Springer: Cham, Switzerland, 2015; pp. 113–141. [Google Scholar]
- Kuznetcov, A.; Telichev, I.; Wu, C.Q. Numerical parametric study on factors affecting passenger safety in motorcoach frontal collision. Int. J. Crashworthiness 2017, 22, 214–226. [Google Scholar] [CrossRef]
- Uenishi, K.; Matsuhisa, H.; Utsuno, H.; Takahashi, Y. Experimental Study of Ride-Down Effect in Automotive Head-on Collisions. J. Environ. Eng. 2010, 5, 498–512. [Google Scholar] [CrossRef] [Green Version]
- Wu, J.; Nusholtz, G.S.; Bilkhu, S. Optimization of vehicle crash pulses in relative displacement domain. Int. J. Crashworthiness 2002, 7, 397–414. [Google Scholar]
- Liao, X.; Li, Q.; Yang, X.; Li, W.; Zhang, W. A two-stage multi-objective optimisation of vehicle crashworthiness under frontal impact. Int. J. Crashworthiness 2008, 13, 279–288. [Google Scholar] [CrossRef]
- Zhang, W.; Ning, H.; Liu, J.; Cho, C. Fast Bayesian approach to model calibration of vehicle occupant restraint systems. Int. J. Crashworthiness 2016, 21, 1–8. [Google Scholar] [CrossRef]
- Hu, L.; Bao, X.; Lin, M.; Yu, C.; Wang, F. Research on risky driving behavior evaluation model based on CIDAS real data. Proc. Inst. Mech. Eng. Part D J. Automob. Eng. 2021, 235, 2176–2187. [Google Scholar] [CrossRef]
- Razali, N.M.; Geraghty, J. Genetic algorithm performance with different selection strategies in solving TSP. In Proceedings of the World Congress on Engineering, London, UK, 6–8 July 2011; International Association of Engineers: Hong Kong, China, 2011; pp. 1–6. [Google Scholar]
- Elhussieny, S.; Oraby, W.; Elkady, M.; Abdelhamid, A.; El-Demerdash, S. Optimisation of crash dynamics for bus cabin structure based on attained intrusion and deceleration during a frontal collision. Int. J. Crashworthiness 2020, 26, 501–514. [Google Scholar] [CrossRef]
- Zhang, H.; Peng, Y.; Hou, L.; Tian, G.; Li, Z. A hybrid multi-objective optimization approach for energy-absorbing structures in train collisions. Inf. Sci. 2019, 481, 491–506. [Google Scholar] [CrossRef]
- Wang, W.; Tian, G.; Chen, M.; Tao, F.; Zhang, C.; Abdulraham, A.A.; Li, Z.; Jiang, Z. Dual-objective program and improved artificial bee colony for the optimization of energy-conscious milling parameters subject to multiple constraints. J. Clean. Prod. 2020, 245, 118714. [Google Scholar] [CrossRef]
- Guohui YU, E.; Xianling, C.; Kai, Z. Case analysis of US NHTSA 2010 version of new car assessment program. J. Automot. Saf. Energy 2012, 3, 129. [Google Scholar]














{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Type | Simplified Crash Pulses | |||
|---|---|---|---|---|
| rectangular pulse |  | |||
| NO. | A1 | |||
| upward pulse |  |  |  | |
| NO. | A2 | A3 | A4 | |
| upward pulse |  |  |  | |
| NO. | A5 | A6 | A7 | |
| downward pulse |  |  |  |  |
| NO. | A8 | A9 | A10 | A11 |
| convex pulse |  |  |  |  |
| NO. | A12 | A13 | A14 | A15 |
| concave pulse |  |  |  | |
| NO. | A16 | A17 | A18 | |
| concave pulse |  |  | ||
| NO. | A19 | A20 | ||
| Type | Simplified Restraint Stiffness Curves | ||
| upward curve |  |  |  |
| NO. | B1 | B2 | B3 |
| upward curve |  |  |  |
| NO. | B4 | B5 | B6 |
| convex curve |  |  |  |
| NO. | B7 | B8 | B9 |
| concave curve |  | ||
| NO. | B10 | ||
| Peak Occupant Acceleration (g/m2) | B1 | B2 | B3 | B4 | B5 | B6 | B7 | B8 | B9 | B10 |
|---|---|---|---|---|---|---|---|---|---|---|
| A1 | 45.67 | 32.11 | 69.25 | 34.16 | 39.36 | 38.37 | 36.04 | 46.26 | 39.27 | 39.28 |
| A2 | 51.28 | 34.36 | 84.41 | 34.09 | 47.33 | 38.39 | 36.04 | 51.19 | 44.80 | 42.28 |
| A3 | 50.59 | 33.87 | 80.73 | 34.15 | 45.85 | 38.24 | 36.04 | 51.27 | 43.49 | 40.19 |
| A4 | 51.25 | 34.54 | 86.38 | 34.14 | 47.78 | 38.40 | 36.05 | 51.18 | 45.53 | 44.38 |
| A5 | 50.37 | 33.97 | 79.39 | 34.16 | 46.29 | 38.39 | 35.91 | 51.28 | 43.54 | 41.62 |
| A6 | 46.44 | 32.04 | 72.73 | 34.19 | 38.75 | 38.41 | 36.00 | 44.79 | 39.43 | 37.25 |
| A7 | 49.50 | 33.09 | 79.53 | 34.19 | 42.47 | 38.29 | 36.06 | 51.29 | 42.00 | 36.92 |
| A8 | 51.29 | 35.41 | 80.71 | 34.19 | 50.94 | 38.50 | 35.91 | 51.28 | 47.00 | 49.52 |
| A9 | 50.60 | 34.49 | 78.19 | 34.18 | 47.97 | 38.26 | 35.96 | 51.26 | 44.71 | 45.38 |
| A10 | 51.25 | 36.09 | 82.20 | 34.09 | 51.36 | 38.36 | 35.86 | 51.18 | 48.82 | 53.27 |
| A11 | 46.44 | 32.77 | 69.98 | 34.15 | 41.92 | 38.37 | 35.88 | 50.57 | 41.10 | 42.24 |
| A12 | 51.25 | 36.31 | 87.63 | 34.09 | 51.17 | 38.44 | 35.84 | 51.14 | 48.82 | 50.06 |
| A13 | 48.58 | 33.12 | 75.76 | 34.12 | 43.06 | 38.39 | 36.02 | 50.49 | 41.66 | 39.29 |
| A14 | 48.58 | 33.53 | 74.20 | 34.15 | 44.56 | 38.24 | 36.03 | 51.29 | 42.38 | 42.39 |
| A15 | 50.82 | 34.28 | 79.79 | 34.12 | 47.43 | 38.39 | 36.05 | 51.27 | 44.19 | 42.94 |
| A16 | 36.10 | 28.63 | 51.51 | 34.19 | 25.58 | 38.46 | 35.95 | 41.48 | 33.89 | 41.25 |
| A17 | 42.48 | 30.86 | 63.24 | 34.17 | 34.58 | 38.45 | 35.98 | 42.20 | 35.94 | 39.29 |
| A18 | 36.94 | 29.08 | 54.19 | 34.15 | 27.26 | 38.27 | 35.91 | 42.95 | 34.66 | 42.40 |
| A19 | 42.18 | 30.79 | 63.12 | 34.16 | 34.31 | 38.45 | 35.87 | 41.87 | 35.53 | 40.06 |
| A20 | 39.24 | 29.55 | 56.28 | 34.19 | 28.50 | 38.46 | 36.01 | 40.16 | 33.91 | 38.64 |
| No. | Average Peak Occupant Acceleration (g) | Peak Value of Crash Pulse (g) | No. | Average Peak Occupant Acceleration (g) | Peak Value of Restraint Stiffness (g) |
|---|---|---|---|---|---|
| A1 | 41.98 | 23 | B1 | 47.04 | 51.3 |
| A2 | 46.42 | 46.1 | B2 | 32.95 | 33 |
| A3 | 45.45 | 34.6 | B3 | 73.46 | 77 |
| A4 | 46.97 | 69.1 | B4 | 34.15 | 34.2 |
| A5 | 45.49 | 27.6 | B5 | 41.83 | 51.3 |
| A6 | 42.00 | 30.7 | B6 | 38.38 | 38.5 |
| A7 | 44.33 | 34.5 | B7 | 35.97 | 36.1 |
| A8 | 47.48 | 46.1 | B8 | 48.22 | 51.3 |
| A9 | 46.10 | 34.5 | B9 | 41.53 | 38.5 |
| A10 | 48.25 | 69.1 | B10 | 42.43 | 36.2 |
| A11 | 43.34 | 30.7 | |||
| A12 | 48.48 | 46.1 | |||
| A13 | 44.05 | 30.7 | |||
| A14 | 44.53 | 30.7 | |||
| A15 | 45.93 | 27.6 | |||
| A16 | 36.70 | 46.1 | |||
| A17 | 39.72 | 30.7 | |||
| A18 | 37.58 | 34.5 | |||
| A19 | 39.63 | 27.6 | |||
| A20 | 37.49 | 51.8 |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2023 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Wang, D.; Zhang, J.; Zhang, T.; Zhang, H.; Peng, Y. A Coupling Optimization Method of Vehicle Structure and Restraint System for Occupant Injury Protection in Traffic Accidents. Symmetry 2023, 15, 558. https://doi.org/10.3390/sym15020558
Wang D, Zhang J, Zhang T, Zhang H, Peng Y. A Coupling Optimization Method of Vehicle Structure and Restraint System for Occupant Injury Protection in Traffic Accidents. Symmetry. 2023; 15(2):558. https://doi.org/10.3390/sym15020558
Chicago/Turabian StyleWang, Danqi, Junyuan Zhang, Tianqi Zhang, Honghao Zhang, and Yong Peng. 2023. "A Coupling Optimization Method of Vehicle Structure and Restraint System for Occupant Injury Protection in Traffic Accidents" Symmetry 15, no. 2: 558. https://doi.org/10.3390/sym15020558
APA StyleWang, D., Zhang, J., Zhang, T., Zhang, H., & Peng, Y. (2023). A Coupling Optimization Method of Vehicle Structure and Restraint System for Occupant Injury Protection in Traffic Accidents. Symmetry, 15(2), 558. https://doi.org/10.3390/sym15020558