1. Introduction
In this review article, we dealt with a certain generalization of the Melvin solution [
1], which was studied earlier in Ref. [
2]. It occurs in the model which contains metric,
n Abelian 2-forms
and
l scalar fields
(
). This solution is governed by a certain non-degenerate matrix
(“quasi-Cartan” matrix),
. It is a particular case of the so-called generalized fluxbrane solutions presented earlier in Ref. [
3].
The original
Melvin’s solution, which describes the gravitational field of a magnetic flux tube, has numerous multidimensional analogs, supported by certain configurations of form fields. These analogs are usually referred to as fluxbranes. The fluxbrane solutions originally appear in superstring/brane models. For generalized Melvin and fluxbrane solutions, see [
4,
5,
6,
7,
8,
9,
10,
11,
12,
13,
14,
15,
16,
17,
18,
19,
20,
21,
22,
23,
24,
25,
26] and references therein.
It is important to note that the solutions from Ref. [
3] are governed by a set of moduli functions
defined on the interval
. Here,
and
is a radial variable. These functions obey a set of
n non-linear ordinary differential equations of second order—so-called master equations, governed by the matrix
(in fact, they are equivalent to Toda-like equations). The moduli functions should also obey the boundary conditions:
,
.
Here, we assume that the matrix
is just a Cartan matrix of a simple finite-dimensional Lie algebra
of rank
n. (Obviously,
for all
s). Due to “polynomial conjecture” from Ref. [
3], the solutions to master equations with the boundary conditions imposed have a polynomial structure:
where
are constants (
) and
Here, we denote
. The parameters
are integers, which are called components of a twice-dual Weyl vector in the basis of simple roots [
27].
In Refs. [
2,
28], a program (in Maple) for the calculation of these (fluxbrane) polynomials for a classical series of Lie algebras (
,
,
,
) was presented.
The fluxbrane polynomials
define special solutions to open Toda chain equations [
29,
30,
31,
32], corresponding to simple finite-dimensional Lie algebra
,
where
,
, and
. These special solutions obey
as
.
In
Section 2, we describe the generalized Melvin solution related to a simple finite-dimensional Lie algebra
[
2]. In
Section 3 and in
Appendix A and
Appendix B, we present fluxbrane polynomials for Lie algebras of ranks
and also for
. Here, we also outline the so-called symmetry and duality identities for these polynomials and consider certain relations between them. In
Section 4, we present calculations of 2-form flux integrals
over a certain
submanifold
. It is amazing that these integrals (fluxes) are finite for all parameters of fluxbrane polynomials. In
Section 5, we outline possible applications of fluxbrane polynomials to dilatonic black hole solutions.
It should be noted that definitions of fluxbrane polynomials can be easily extended to (finite dimensional) semisimple Lie algebras.
2. The Solutions
We consider a model governed by the action
where
is a metric,
is a set of scalar fields, and
is a constant symmetric non-degenerate
matrix
,
is a 2-form,
is a 1-form on
:
,
;
. Here,
,
, are dilatonic coupling vectors. In (
6) we denote
,
,
.
Here, we deal with a family of exact solutions to field equations which correspond to the action (
6) and depend on one variable
. These solutions are defined on the manifold,
where
is a one-dimensional manifold (say
or
) and
is a (
)-dimensional Ricci-flat manifold. The solution (from the family under consideration) reads [
2]
;
, where
,
is a metric on
and
is a Ricci-flat metric on
. Here,
are integration constants (
in notations of Ref. [
2]),
.
The moduli functions
,
obey the master equations,
with the following boundary conditions:
where
. For
, the boundary conditions (
12) are necessary to avoid a conic singularity (for our metric (
8)) in the limit
.
The parameters
obey the relations,
where
, with
. In the relations above we denote
and
This is the so-called quasi-Cartan matrix.
The constants
and
are related to scalar products of so-called “brane vectors”
, belonging to a certain linear space (in our case it has dimension
). We have
and
, with certain scalar product
defined in Refs. [
33,
34]. Such scalar products appear in various solutions with branes (black branes, fluxbranes,
S-branes etc), e.g., in calculations of certain physical parameters (Hawking temperature, black hole/brane entropy, PPN parameters etc), see Ref. [
34].
Product relation (
16) defines generalized intersection rules for branes [
33], while numbers
are invariant under dimensional reductions with typical value
for brane
U-vectors which appear in numerous supergravity models, e.g., for
[
35].
It can be readily shown that if the matrix
is of Euclidean signature,
, and
is a Cartan matrix of certain simple Lie algebra of rank
n, then there exist co-vectors
obeying (
16).
Our solution is nothing more than a special case of the fluxbrane (for
,
) and
S-brane (
) solutions from Refs. [
3,
25], respectively.
If we put
and choose Ricci-flat metric
of pseudo-Euclidean signature on manifold
of dimension
, we obtain a higher dimensional generalization of the Melvin’s solution [
1].
The Melvin’s solution does not contain scalar fields. It corresponds (in our notations) to , , , , (), , , and Lie algebra .
For the case of and of Euclidean signature, one can obtain a cosmological solution with a horizon (as ) if ().
3. Examples of Solutions for Certain Lie Algebras
Here, we deal with the generalized Melvin-like solution for , and , which corresponds to simple (finite dimensional) Lie algebra of certain rank n with the Cartan matrix .
We put here and denote , .
; (
17) just follows from (
18).
Remark 1. For large enough in (18) (or large enough ), there exist vectors obeying (18) (and hence (17)). Indeed, the matrix is positive definite if , where is some positive number. Hence, there exists a matrix Λ
, such that . We put and get a set of vectors obeying (18). Here, as in [
36], we use another parameter
instead of
:
. This is carried out to avoid big denominators for
in relation (
1).
Remark 2. The parameters give us the coefficients in (1): . These relations can be readily obtained by putting into master Equation (11) and using the boundary conditions (12). Moreover, for given Lie algebra one can deduce recurrent relations for higher coefficients in (1) as functions of and solve the chain of recurrent relations, justifying that , for all . We note also that, for a special choice of
parameters:
, the polynomials have the following simple form [
3]:
. This relation may be considered a nice tool for the verification of general solutions for polynomials.
3.1. Rank-1 Case
-case. We start with the simplest example, which occurs for the Lie algebra
. We obtain [
3]
Here, .
In this case (due to (
14)–(
16)), we have
.
Due to (
22), we get the following asymptotical behavior:
as
.
Relations (
22) and (
24) imply the following identity.
Duality Relation
Proposition 1. The fluxbrane polynomial corresponding to Lie algebra obeys for all and the identity 3.2. Rank-2 Case
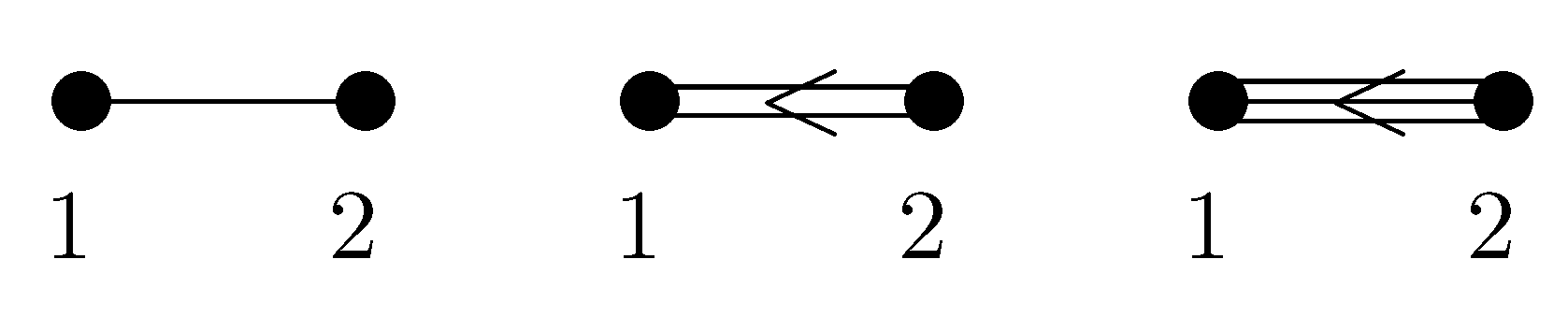
Now, we proceed with the solutions which correspond to simple Lie algebras
of rank 2, i.e., the matrix
is just a Cartan matrix,
where
for
, respectively [
37].
The matrix
A is described graphically by the Dynkin diagrams presented in
Figure 1 (for any of these three Lie algebras).
It follows from (
14)–(
16) that
where
for
, respectively.
3.2.1. Polynomials
-case. For the Lie algebra
, we have [
3,
25,
36]
-case. In the case of Lie algebra
, we get the following polynomials [
25,
36]:
-case. For the Lie algebra
, the fluxbrane polynomials read [
25,
36]:
; where .
We have the following asymptotical relations for polynomials:
, as .
Here,
is the integer valued matrix,
for Lie algebras
, respectively.
For last two cases (
and
), we have
(
is inverse Cartan matrix). For the
-case, the matrix
reads
where
I is a
identity matrix and
is a permutation matrix. It corresponds to the permutation
(
is symmetric group)
by the following relation
. Here,
is the generator of the group
—the group of symmetry of the Dynkin diagram (for
), which is isomorphic to the group
.
Here, in all cases we get
.
Now, we denote for the -case and for and cases, . We call the ordered set a dual one to the ordered set . Using the relations for polynomials, we obtain the following identities (which can be readily verified just “by hands”).
3.2.2. Symmetry Relations
Proposition 2. The fluxbrane polynomials for obey for all and z the identities: .
3.2.3. Duality Relations
Proposition 3. The fluxbranes polynomials corresponding to Lie algebras , and obey for all and the identities .
We call relations (
42) duality ones.
3.3. Rank-3 Algebras
Now, we deal with polynomials which correspond to simple Lie algebras
of rank 3, when the matrix
coincides with one of the Cartan matrices,
for
, respectively [
38].
Any of these matrices is described graphically by a Dynkin diagram pictured in
Figure 2.
It follows from (
14), (
16) that
for any
obeying
. This implies
or
() for , respectively.
3.3.1. Polynomials
The set of moduli functions
, obeying Equations (
11) and (
12) with the matrix
from (
43) are polynomials with powers
for
, respectively. We get the following polynomials [
38].
-case. For the Lie algebra
we have [
28,
36]
-case. In the case of Lie algebra
, the fluxbrane polynomials read [
28]
-case. For the Lie algebra
, we obtain (with the use of MATHEMATICA) the following polynomials:
We denote
where
.
Due to obtained relations for polynomials, we get the asymptotical behavior
as
.
Here,
is the integer valued matrix
for Lie algebras
, respectively.
For Lie algebras
and
we have
where
is inverse Cartan matrix. For the
-case the matrix
reads as follows:
where
I is
identity matrix and
is a permutation matrix, which corresponds to the permutation
(
is symmetric group)
by the following formula
. Here,
is the generator of the group
—the group of symmetry of the Dynkin diagram (for
), which is isomorphic to the group
.
Here, in all three cases we have
.
Now, we introduce notations: for the and for and algebras, . Using relations for rank-3 polynomials, we obtain (with a help of MATHEMATICA) the following identities.
3.3.2. Symmetry Relations
Proposition 4. The fluxbrane polynomials for algebra obey for all and z the identities: .
3.3.3. Duality Relations
Proposition 5. The fluxbranes polynomials corresponding to Lie algebras , and obey for all and the identities .
3.4. Rank-4 Algebras
In this subsection, we deal with the solutions related to Lie algebras
of rank 4, i.e., the matrix
coincides with one of the Cartan matrices.
for
, respectively.
These matrices are graphically described using the Dynkin diagrams pictured in
Figure 3.
It follows from (
14), (
16) that
for any
obeying
. This implies
or
(
) for
, respectively, and
or
() for .
3.4.1. Polynomials
Due to polynomial conjecture, the functions
, obeying Equations (
11) and (
12) with the Cartan matrix
from (
66) should be polynomials with powers
,
,
,
,
(see (
2)) for Lie algebras
,
,
,
,
, respectively.
One can verify this conjecture by using appropriate MATHEMATICA algorithm, which follows from master Equation (
11). Below we present a list of the obtained polynomials [
39,
40].
-case. For the Lie algebra
we find
-case. In the case of Lie algebra
, the fluxbrane polynomials read:
-case. For the Lie algebra
, we have the following polynomials:
-case. In the case of Lie algebra
, we obtain the following polynomials
-case. Now we consider the exceptional Lie algebra
. We obtain the following polynomials
The asymptotic formulae for the polynomials read:
where the matricies
have the following form
for Lie algebras
, respectively. In all these cases we are led to the relations
In the case of Lie algebras
,
,
and
we have
where
is inverse Cartan matrix, whereas in the
-case the matrix
reads as follows
Here,
I is
identity matrix and
is a matrix which corresponds to the permutation
(
is symmetric group)
due to relation
. Here,
is the generator of the group of symmetry of the Dynkin diagram for
:
. This group is isomorphic to the group
.
For the Lie algebra , we are led to the group of symmetry of the Dynkin diagram , which is isomorphic to the symmetric group . This group is acting on the set of three vertices of the diagram by their permutations. The groups symmetry and imply certain identity properties for the polynomials .
Now, we introduce the dual (ordered) set: for the algebra , and for algebras , , , (). The dual set for case is a result of action of the generator of the group on vertices of the Dynkin diagram.
Afterwards we obtain symmetry and duality identities. They were verified by using certain MATHEMATICA algorithm.
3.4.2. Symmetry Relations
Proposition 6. The fluxbrane polynomials satisfy for all and z the following identities:for any , . 3.4.3. Duality Relations
Proposition 7. The fluxbrane polynomials corresponding to Lie algebras , , , and obey for all and the identities: .
3.5. Rank-5 Algebras
Now turn our attention to the solutions corresponding to Lie algebras of rank 5 when the matrix
is coinciding with one of the Cartan matrices
for
, respectively.
Figure 4 gives us graphical presentations of these matrices by Dynkin diagrams.
3.5.1. Polynomials
According to the conjecture from Ref. [
3], the functions
obeying Equations (
11) and (
12) with any matrix
from (
102), should be polynomials. Relation (
2) gives us the powers of these polynomials:
=
,
,
,
for Lie algebras
,
,
,
, respectively.
In this case the verification (or proof) of the polynomial conjecture [
3] is following: we solve the set of algebraic equations for the coefficients of the polynomials (
1) which follow from the master Equation (
11).
In this subsection, we present the structures (or “truncated versions”) of these polynomials. The total list of the polynomials is presented in
Appendix A. The polynomials were obtained by using a certain MATHEMATICA algorithm in Ref. [
41].
-case. For the Lie algebra
the polynomials have the following structure
-case. In the case of Lie algebra
the polynomial structure is following
-case. The polynomials corresponding to Lie algebra
have the following structure:
-case. In the case of Lie algebra
, we are led to the the following structure of polynomials
By using notations
we write asymptotic relations for polynomials
Here, we denote by
the integer valued matrix. It has the form
for Lie algebras
, respectively.
One can readily verify that any matrix
obeys the following identity
For Lie algebras
,
, the matrix
is twice inverse Cartan matrix
:
and in the
and
cases we are led to another relation:
Here, we use the notations: I—for identity matrix and —for a matrix corresponding to a certain permutation ( is symmetric group), , where is the generator of the group . The group G is isomorphic to the group . For and the group of symmetry of the Dynkin diagram acts on the set of corresponding five vertices via their permutations.
The explicit forms for the permutation matrix
P and the generator
for both Lie algebras
read as follows:
The above symmetry groups control certain identity properties for polynomials .
We also denote for the and cases, and for and cases ().
By using MATHEMATICA algorithms we were able to verify the validity of the following identities.
3.5.2. Symmetry Relations
Proposition 8. The fluxbrane polynomials, corresponding to Lie algebras and , obey for all and z the following identities:where , , is defined for each algebra by Equations (109) and (110). 3.5.3. Duality Relations
Proposition 9. The fluxbrane polynomials which correspond to Lie algebras , , , , satisfy for all and the following identities .
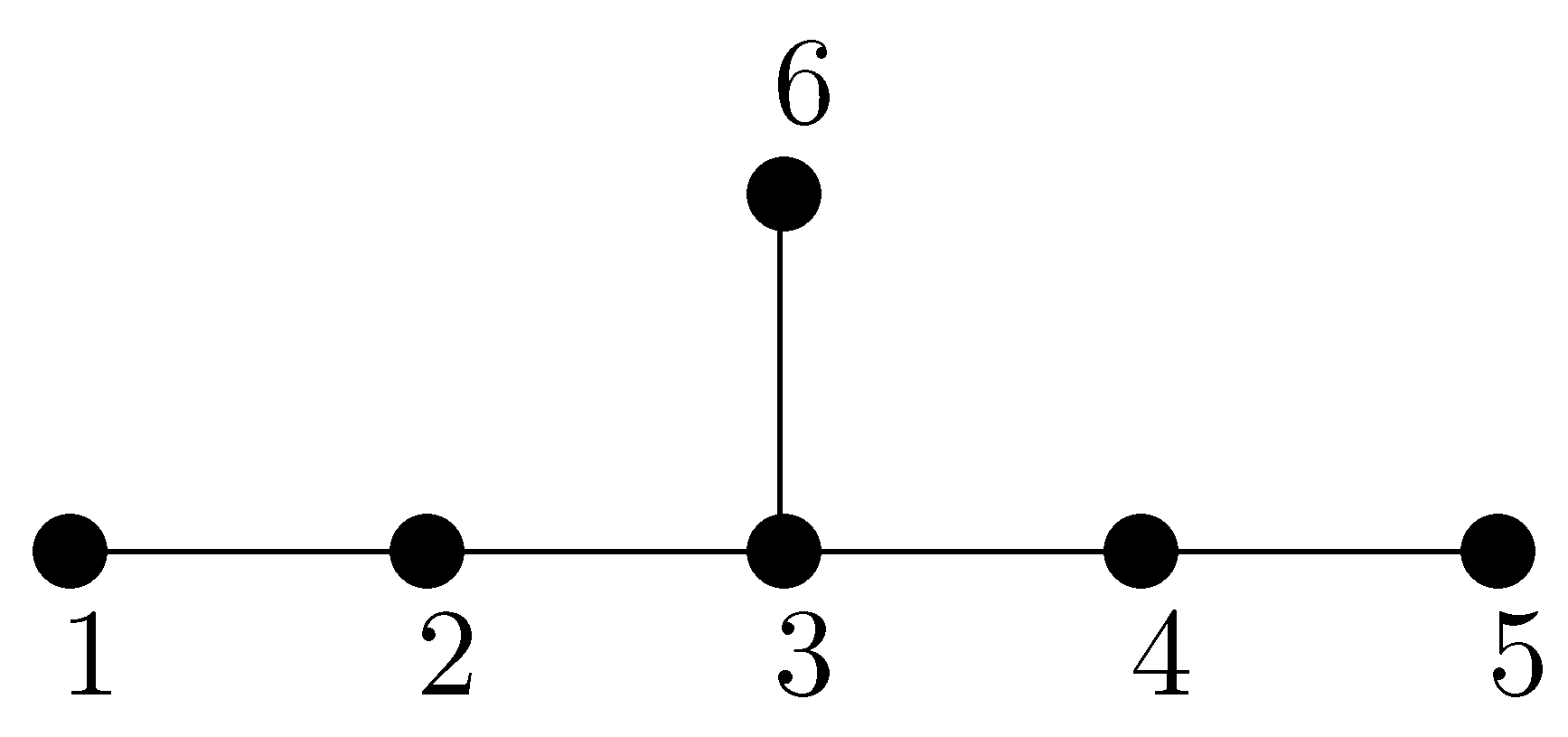
3.6. Algebra
Now we deal with the exceptional Lie algebra
. The matrix
A is coinciding with the Cartan matrix (for
)
This matrix is graphically depicted by the Dynkin diagram in
Figure 5.
The inverse Cartan matrix for
implies due to (
2)
For the Lie algebra
we find the set of six fluxbrane polynomials [
42], which are listed in
Appendix B.
The polynomials have the following structure:
The powers of polynomials are in agreement with the relation (
115). In what follows we denote
; where .
Due to (
116) the asymptotical relations for the polynomials read as follows
, as
. Here,
This matrix reads
where
is inverse Cartan matrix,
I is
identity matrix and
is permutation matrix. This matrix is related to the permutation
(
is symmetric group)
by the following formula
. Here,
is the generator of the group of symmetry of the Dynkin diagram
. (
G is isomorphic to the group
.)
is a composition of two transpositions:
and
.
We note that the matrix
is symmetric one and
.
Now we introduce the dual (ordered) set
,
. By using the relations for polynomials from
Appendix B we are led to the following two identities which are verified with the aid of MATHEMATICA.
3.6.1. Symmetry Relations
Proposition 10. .
3.6.2. Duality Relations
Proposition 11. For all and .
The solution (
8)–(10) reads in our case
, where
is a metric on
(
),
is a Ricci-flat metric on
of signature
. Here,
and due to (
14)–(
16)
.
3.7. Some Relations between Polynomials
Here, we denote the set of polynomials corresponding to a set of parameters
, …,
as following
, where is the Cartan matrix corresponding to a (semi)simple Lie algebra of rank n.
3.7.1. -Polynomials from -Ones
It was conjectured in Ref. [
28] that the set of polynomials corresponding to the Lie algebra
may be obtained from the set of polynomials corresponding to the Lie algebra
according to the following relations
, i.e., the parameters are identified symmetrically with respect to .
Relation (
133) may be readily verified at least for
by using explicit relations for corresponding polynomials presented above.
3.7.2. -Polynomials from -Ones
Due to the conjecture from Ref. [
28], the set polynomials corresponding to the Lie algebra
can be obtained from the set of polynomials corresponding to the Lie algebra
according to the following relation
, i.e., the parameters and are identified.
Relation (
134) can be readily verified at least for
by using explicit relations for corresponding polynomials presented above.
3.7.3. -Polynomials from -Ones
It can be readily checked that
-polynomials may be obtained just by imposing the following relations on parameters of
-polynomials:
. We obtain
It looks like we glue the symmetric points (1, 3 and 4) at the Dynkin graph for
algebra (see
Figure 3) in order to obtain the Dynkin graph for
algebra (see
Figure 1).
3.7.4. -Polynomials from -Ones
It can be verified that
-polynomials may be obtained by imposing the following relations on parameters of
-polynomials:
,
,
,
. We obtain
It looks like we glue the symmetric points (1 and 5, 2 and 4) at the Dynkin graph for
algebra (see
Figure 5) in order to obtain the Dynkin graph for
algebra (see
Figure 3).
3.7.5. Reduction Formulas
Here, we denote the Cartan matrix in the following way:
, where
is the related Dynkin graph. Let
i be a node of
. We denote by
a Dynkin graph (which corresponds to a certain semi-simple Lie algebra) that is obtained from
by erasing all lines that have endpoints at
i. It can be verified (e.g., by using MATHEMATICA) that for the polynomials presented above the following reduction formulae hold
, and
This means that by setting we reduce the set of polynomials by replacing the Cartan matrix with the Cartan matrix . In this case the polynomial corresponds to -subalgebra (represented by the node i) and the parameter .
As an example of reduction formulas we present the following relations
, for
with suitable restrictions on
n. These relations are valid at least for all
-polynomials presented above. In writing relation (
141) we use the numbering of the nodes in accordance with the Dynkin diagrams shown in the figures presented above.
The reduction formulas (
142) for
-polynomials with
are shown in
Figure 6. The reduced polynomials coincide with those corresponding to semisimple Lie algebra
.
4. Flux Integrals
As in the previous section, we deal here with the solution (
8)–(10) with
,
and
and
.
We denote , . The solution corresponds to a simple finite-dimensional Lie algebra , i.e., the matrix is coinciding with the Cartan matrix of this Lie algebra.
In this case, we get relations (
17), (
18) for
and scalar products
which follow from (
14)–(
16).
Due to (
14)–(
16) that
for any
obeying
;
.
It follows from (
144) and the connectedness of the Dynkin diagram for a simple Lie algebra that
, where
is length squared of a simple root
of the Lie algebra
. Here, (
is dual Killing–Cartan form and
. Due to (
145) we obtain
, where .
Now we consider the oriented 2-dimensional manifold
. The flux integrals read
where
Due to (
13) and (
19) we have
The integrals (
148) are convergent for all
, if the conjecture on polynomial structure of moduli functions
is satisfied for the Lie algebra
under consideration.
Indeed, polynomial assumption (
1) implies
as
;
. From (
149), (
151) and the identities
, following from (
2), we obtain
Hence the integral (
148) is convergent for any
.
From master Equation (
11), we obtain
which implies (see (
13)) [
43]
.
Thus, we see that any flux depends only upon one integration constant . This is a nontrivial fact since the integrand form depends upon all constants: .
It should be noted that, for and , is coinciding with the value of the x-component of the magnetic field on the axis of symmetry.
For the case of Gibbons–Maeda dilatonic generalization of the Melvin solution, corresponding to
,
and
[
6], the flux from (
154) (
) is in agreement with that obtained in Ref. [
26]. For the Melvin’s solution and some higher dimensional extensions (with
) see also Ref. [
15].
Owing to (
145) the ratios
are just fixed numbers which depend upon the Cartan matrix
of a simple finite-dimensional Lie algebra
.
Since the manifold
is isomorphic to the manifold
, the solution (
8)–(10) may be rewritten (by pull-backs) onto manifold
. In this new presentation of the solution coordinates
,
are understood as polar coordinates on
. Since they are not globally defined one may consider two charts with coordinates
,
and
,
, where
,
and
. Here,
. For both charts we have
and
, where
are standard (Euclidean) coordinates of
. By using the identity
we obtain
.
Now, let us show that 2-forms (
156) are well-defined on
. Indeed, due to conjecture from Ref. [
3] any polynomial
is a smooth function on
obeying
for
, where
. This is so since due to polynomial conjecture from Ref. [
3] we have
for
and
. Hence,
is a smooth function since it is just a composition of two well-defined smooth functions:
and
.
Now, we show that there exist 1-forms
obeying
which are globally defined on
. Let us consider the open submanifold
. The 1-forms
are well defined on
and obey
,
. It is obvious that here
It follows from the master Equation (
11) that
. Here,
. Due to relation
, we obtain
. Thus, we are led to 1-forms (
160) which are well-defined (smooth) 1-forms on
.
It should be noted that in case of Gibbons–Maeda solution [
6] (with
,
and
) the gauge potential from (
159) coincides (up to notations) with that considered in Ref. [
8].
Now we verify the formula (
154) for flux integrals by using the relation (
160) for 1-forms
. Let us consider a
oriented manifold (disk)
with the boundary
Here,
is a circle of radius
R. It is just an
oriented manifold with the orientation (inherited from that of
) obeying the relation
. Using the Stokes–Cartan theorem we obtain
. By using the asymptotic relation (
151) we get
, in agreement with (
154).
We note that, according to the definition of Abelian Wilson loop (factor), we have
. As a consequence (see (
164)), we obtain finite limits
.
Finally, we note that the metric and scalar fields for our solution with and can be extended to the manifold .
Indeed, in standard
coordinates on
the metric (
8) and scalar fields (9) read as follows [
43]
. Here,
,
,
and
, where
for
and
The metric and scalar fields are smooth on the manifold
[
43].
5. Dilatonic Black Holes
Relations on dilatonic coupling vectors (
14)–(
16) also appear for dilatonic black hole (DBH) solutions defined on the manifold
where
and
is a Ricci-flat manifold. These DBH solutions on
M from (
171) for the model under consideration may be extracted just from more general black brane solutions, see Refs. [
35,
36,
44]. They read:
, where , is the standard metric on and is a Ricci-flat metric of signature on . Here, are integration constants (charges).
The functions
obey the master equations
with the following boundary conditions (on the horizon and at infinity) imposed:
where
.
It was shown in Ref. [
36] that these polynomials may be obtained (at least for small enough
) from fluxbrane polynomials
presented in this paper.
Indeed, let us denote
,
. Then, the relations (
175) may be rewritten as follows
. These relations could be solved (at least for small enough
) by using fluxbrane polynomials
, given by
Cartan matrix
, where
is the set of parameters [
36]. Here we impose the restrictions
for all
s.
Due to approach of Ref. [
36] we put
for
. Then, the relations (
178), are satisfied identically if [
36]
.
We call the set of parameters
(
) a proper one if [
36]
for all
and
. Here, we consider only proper
p. Due to relations (
180) and
, we have
for all
, i.e., one should use fluxbrane polynomials with negative parameters
for a description of black hole solutions under consideration.
The boundary conditions (
176) are valid, since
(see definition (
179)).
For small enough
, the set
is proper and relation (
180) defines one-to-one correspondence between the sets of parameters
and
.
Relations (
182) imply the following formula for the Hawking temperature [
36]
It should be noted that fluxbrane polynomials were used in Refs. [
45,
46,
47] in the context of dyon-like black hole solutions. (To a certain extent these papers were inspired by Ref. [
48].)
6. Conclusions
Here, we have explored a multidimensional generalization of the Melvin’s solution corresponding to a simple finite-dimensional Lie algebra . It takes place in a D-dimensional model which contains metric n Abelian 2-forms and scalar fields . (Here, we have put for simplicity.)
The solution is governed by a set of n moduli functions , , which were assumed earlier to be polynomials—so-called fluxbrane polynomials. These polynomials define special solutions to open Toda chain equations corresponding to the Lie algebra . The polynomials also depend upon parameters , where are coinciding for (up to a sign) with the values of colored magnetic fields on the axis of symmetry.
Here, we have presented examples of polynomials corresponding to Lie algebras of rank and exceptional Lie algebra and have outlined the symmetry and duality relations for these polynomials. The so-called duality relations for fluxbrane polynomials describe a behavior of the solutions under the inversion: , which makes the model in tune with so-called T-duality in string models. These relations can be also mathematically understood in terms of the discrete groups of symmetry of Dynkin diagrams for the corresponding Lie algebras.
We have presented calculations of flux integrals , where are 2-forms, . It is remarkable that any flux depends only upon one parameter , while the integrand depends upon all parameters .
Here, we have also outlined possible applications of fluxbrane polynomials for seeking dilatonic black hole solutions (e.g., ones) in the model under consideration.
It should be noted that fluxbrane polynomials may also describe certain subclass of self-dual solutions to Yang-Mills equations in a flat space of signature
[
49]. This subclass belong to a more general Toda chain class of self-dual solutions.
Here, an interesting question occurs: how can the nice properties of polynomials (symmetries, duality relations, reduction formulas) be used for a description of geometries of Melvin-like solutions (and other fluxbrane ones) and possible generating of new solutions? This and other related questions may be a subject of future publications.



{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}





