
Magnetotelluric Noise Attenuation Using a Deep Residual Shrinkage Network


 ,
,  and
and 
Abstract
:1. Introduction
2. Methods
2.1. The DRSN Method
- (1)
- DRSN-CS has the block of “residual shrinkage building unit with channel-shared thresholds (RSBU-CS)”.
- (2)
- DRSN-CW has the block of “residual shrinkage building unit with channel-wise thresholds (RSBU-CW)”.
2.2. Principle of MT Denoising by DRSN
2.2.1. Soft Threshold Function
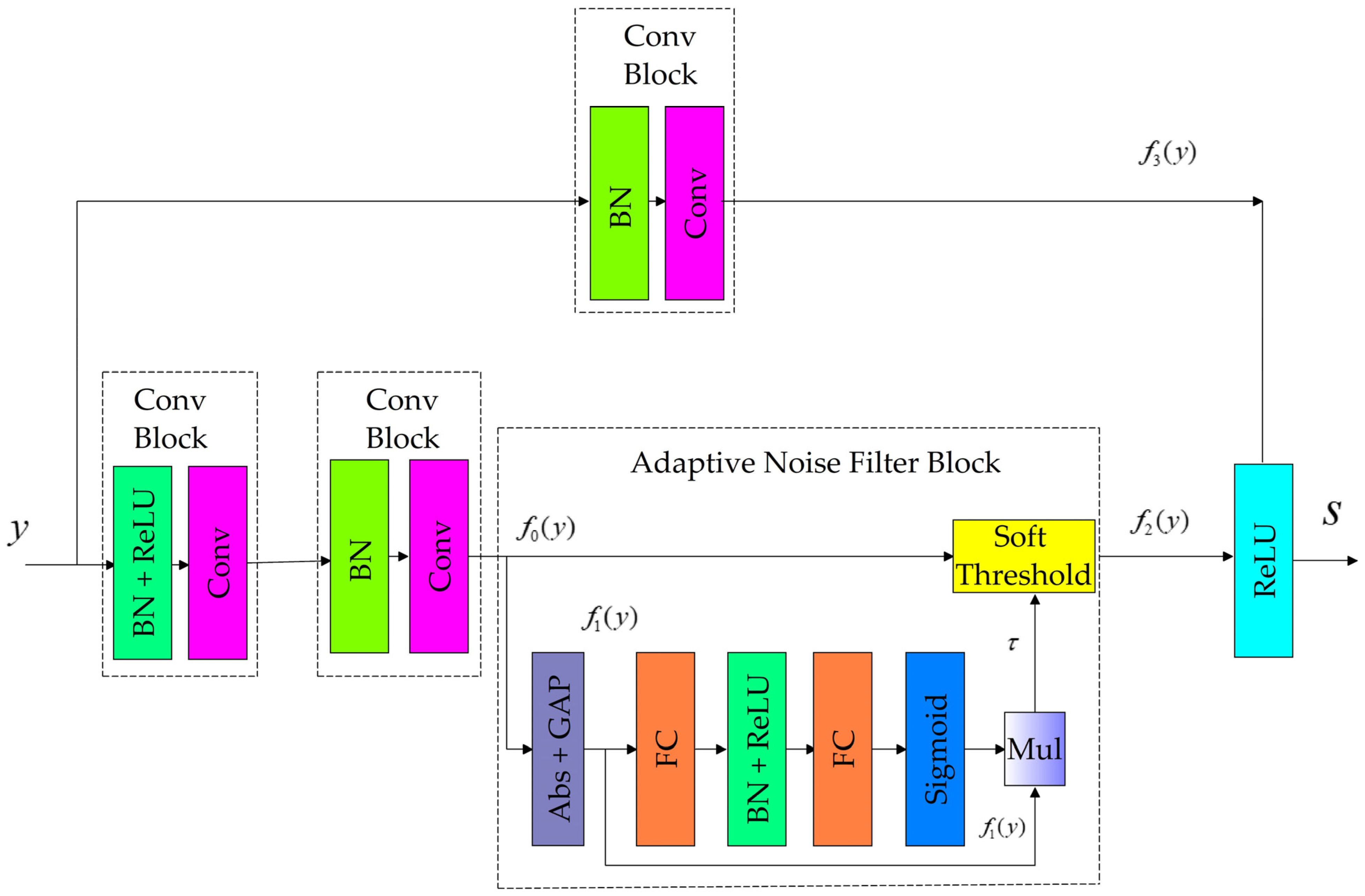
2.2.2. Adaptive Noise Filter Block
- -
- CPU: Intel i7-9700K, 3.00 GHz, 8×;
- -
- GPU: Nvidia GeForce RTX 2060 SUPER, 8 GB;
- -
- RAM: 16 GB.
2.3. Datasets
2.4. Training the DRSN for Denoising
- Hyperparameter setup
- 2.
- Optimize hyperparameters through training
3. Experiments
3.1. Simulation Data Experiments
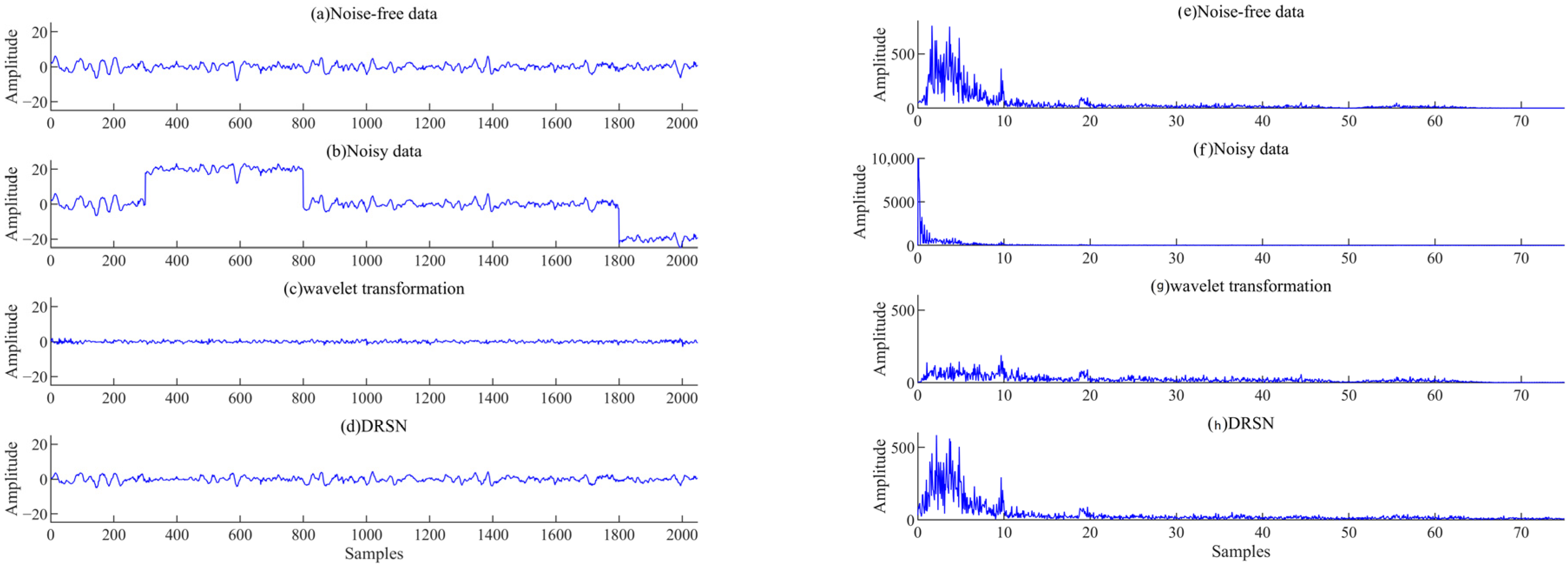
3.1.1. Comparison with Wavelet Transformation and VMD
3.1.2. Comparison with Other Deep Learning Models
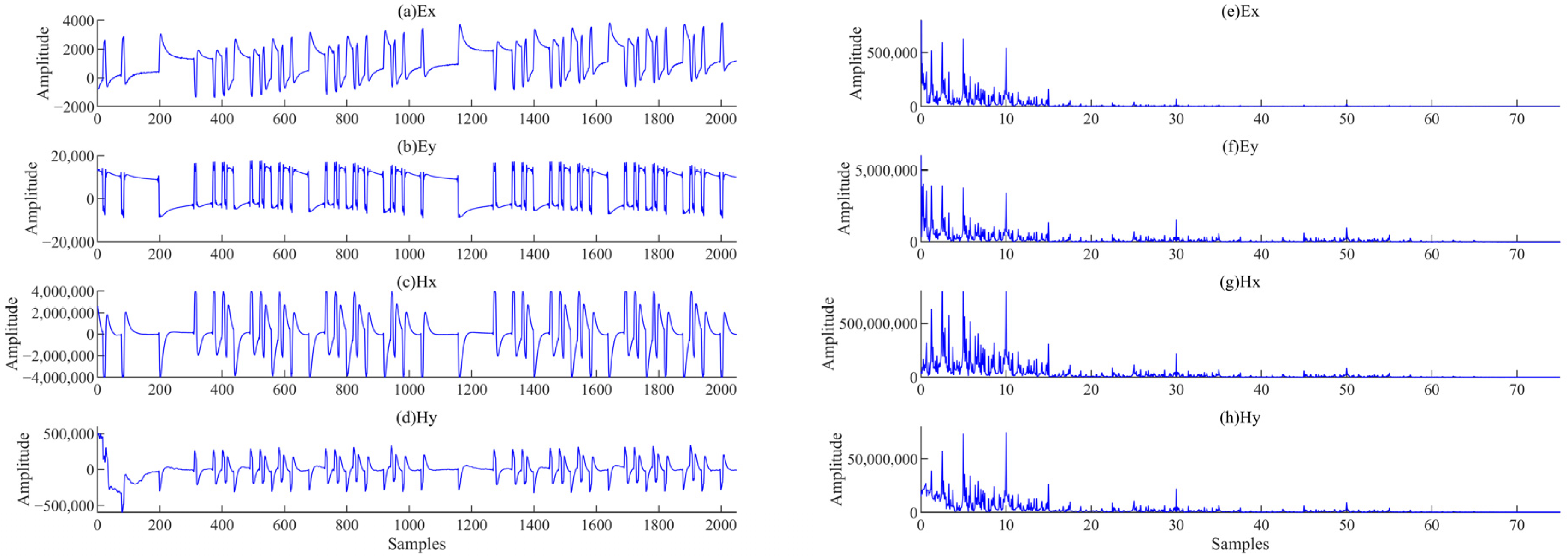
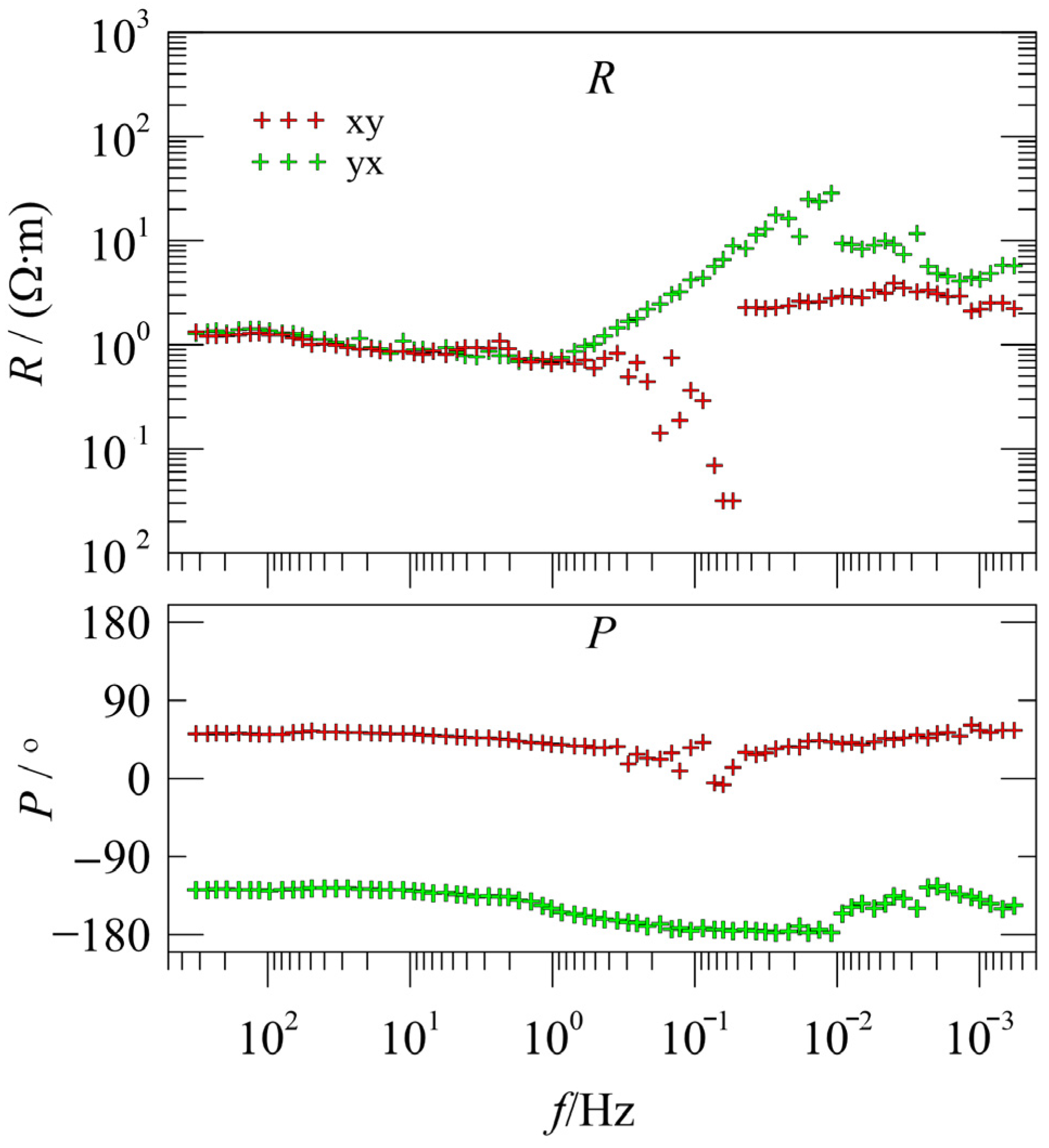
3.2. Actual Data Experiments
3.2.1. Experimental Data in Qaidam Basin
3.2.2. Experimental Data in Luzong
4. Discussion
5. Conclusions
Author Contributions
Funding
Data Availability Statement
Acknowledgments
Conflicts of Interest
References
- Tikhonov, A. On determining electrical characteristics of the deep layers of the Earth’s crust. Dokl. Akad. Nauk. USSR 1950, 73, 295–297. [Google Scholar]
- Cagniard, L. Basic theory of the magneto-telluric method of geophysical prospecting. Geophysics 1953, 18, 605–635. [Google Scholar] [CrossRef]
- Abimanyu, T.; Daud, Y. Re-evaluation of magnetotelluric 3D data processing results to reduce the risk of drilling in the “SML” geothermal field. AIP Conf. Proc. 2021, 2320, 040009. [Google Scholar] [CrossRef]
- Guo, Z.W.; Lai, J.Q.; Zhang, K.N.; Mao, X.C.; Wang, Z.L.; Guo, R.W.; Deng, H.; Sun, P.H.; Zhang, S.H.; Yu, M.; et al. Geosciences in Central South University: A state-of-the-art review. J. Cent. South Univ. 2020, 27, 975–996. [Google Scholar] [CrossRef]
- Garcia, X.; Jones, A.G. Atmospheric sources for audiomagnetotellurics (AMT) sounding. Geophysics 2002, 67, 448. [Google Scholar] [CrossRef]
- Cai, J.H.; Tang, J.T.; Hua, X.R.; Gong, Y.R. An analysis method for magnetotelluric data based on the Hilbert–Huang transform. Explor. Geophys. 2009, 40, 197–205. [Google Scholar] [CrossRef]
- Ren, Z.Y.; Kalscheuer, T.; Greenhalgh, S.; Maurer, H. A goal-oriented adaptive finite-element approach for plane wave 3-D electromagnetic modelling. Geophys. J. Int. 2013, 194, 700–718. [Google Scholar] [CrossRef]
- Qi, J.; Zhang, L.; Zhang, K.; Li, L.; Sun, J. The application of improved differential evolution algorithm in electromagnetic frac-ture monitoring. Adv. Geo-Energy Res. 2020, 4, 233–246. [Google Scholar] [CrossRef]
- Ritter, O.; Junge, A.; Dawes, G.J.K. New equipment and processing for magnetotelluric remote reference observations. Geophys. J. Int. 1998, 132, 535–548. [Google Scholar] [CrossRef]
- Gamble, T.D.; Goubau, W.M.; Clarke, J. Magnetotellurics with a remote magnetic reference. Geophysics 1979, 44, 53–68. [Google Scholar] [CrossRef]
- Tang, J.T.; Li, G.; Zhou, C.; Li, J.; Liu, X.Q.; Zhu, H.J. Power-line interference suppression of MT data based on frequency domain sparse decomposition. J. Cent. South Univ. 2018, 25, 2150–2163. [Google Scholar] [CrossRef]
- Egbert, G.D. Robust multiple-station magnetotelluric data processing. Geophys. J. Int. 1997, 130, 475–496. [Google Scholar] [CrossRef]
- Neukirch, M.; García, X. Nonstationary magnetotelluric data processing with instantaneous parameter. J. Geophys. Res. Solid Earth 2014, 119, 1634–1654. [Google Scholar] [CrossRef]
- Escalas, M.; Queralt, P.; Ledo, J. Polarisation analysis of magnetotelluric time series using a wavelet-based scheme: A method for detection and characterization of cultural noise sources. Phys. Earth Planet Inter. 2013, 218, 31–50. [Google Scholar] [CrossRef]
- Tang, J.T.; Li, J.; Xiao, X.; Zhang, L.C. Mathematical morphology filtering and noise suppression of magnetotelluric sounding data. Chin. J. Geophys. 2012, 55, 1784–1793. [Google Scholar] [CrossRef]
- Li, G.; Xiao, X.; Tang, J.T.; Li, J.; Zhu, H.J.; Zhou, C.; Yan, F.B. Near-source noise suppression of AMT by compressive sensing and mathematical morphology filtering. Appl. Geophys. 2017, 14, 581–589. [Google Scholar] [CrossRef]
- Tang, J.T.; Xu, Z.M.; Xiao, X.; Li, J. Effect rules of strong noise on magnetotelluric (mt) sounding in the luzong ore cluster area. Chin. J. Geophys. 2012, 55, 4147–4159. [Google Scholar] [CrossRef]
- Trad, D.O.; Travassos, J.M. Wavelet filtering of magnetotelluric data. Geophysics 2000, 65, 482–491. [Google Scholar] [CrossRef]
- Tang, J.T.; Li, G.; Xiao, X.; Li, J.; Zhou, C.; Zhu, H.J. Strong noise separation for magnetotelluric data based on a signal reconstruction algorithm of compressive sensing. Chin. J. Geophys. 2017, 60, 3642–3654. [Google Scholar] [CrossRef]
- Li, G.; Liu, X.; Tang, J.T.; Deng, J.Z.; Hu, S.G.; Zhou, C.; Chen, C.; Tang, W. Improved shift-invariant sparse coding for noise attenuation of magnetotelluric data. Earth Planets Space 2020, 72, 45. [Google Scholar] [CrossRef]
- Li, G.; He, Z.; Tang, J.T.; Deng, J.Z.; Liu, X.; Zhu, H.J. Dictionary learning and shift-invariant sparse coding denoising for controlled-source electromagnetic data combined with complementary ensemble empirical mode decomposition. Geophysics 2021, 86, E185–E198. [Google Scholar] [CrossRef]
- Zhang, X.; Li, J.; Li, D.Q.; Li, Y.; Liu, B.; Hu, Y.F. Separation of magnetotelluric signals based on refined composite multiscale dispersion entropy and orthogonal matching pursuit. Earth Planets Space 2021, 73, 76. [Google Scholar] [CrossRef]
- Li, G.; Liu, X.; Tang, J.; Li, J.; Ren, Z.; Chen, C. De-noising low-frequency magnetotelluric data using mathematical morphology filtering and sparse representation. Appl. Geophys. 2020, 172, 103919. [Google Scholar] [CrossRef]
- Xiao-le, G.; Kun-de, Y.; Yang, S.; Rui, D. An underwater acoustic data compression method based on compressed sensing. J. Cent. South Univ. 2016, 23, 1981–1989. [Google Scholar]
- Huang, T.; Yang, Y.; Yang, X. A survey of deep learning-based visual question answering. J. Cent. South Univ. 2021, 28, 728–746. [Google Scholar] [CrossRef]
- Carbonari, R.; Di Maio, R.; Piegari, E.; D’Auria, L.; Esposito, A.; Petrillo, Z. Filtering of noisy magnetotelluric signals by som neural networks. Phys. Earth Planet. Inter. 2018, 285, 12–22. [Google Scholar] [CrossRef]
- Wu, X.; Xue, G.; Xiao, P.; Li, J.; Liu, L.; Fang, G. The removal of the high-frequency motion-induced noise in helicopter-borne transient electromagnetic data based on wavelet neural network. Geophysics 2019, 84, K1–K9. [Google Scholar] [CrossRef]
- Xu, T.T.; Wang, Z.W. Magnetotelluric power frequency interference suppression based on lstm recurrent neural network. Prog. Geophys. 2020, 35, 2016–2022. [Google Scholar] [CrossRef]
- He, K.; Zhang, X.; Ren, S.; Sun, J. Deep residual learning for image recognition. In Proceedings of the IEEE Conference on Computer Vision and Pattern Recognition, Las Vegas, NV, USA, 27–30 June 2016; pp. 770–778. [Google Scholar]
- Fan, G.; Li, J.; Hao, H. Vibration signal denoising for structural health monitoring by residual convolutional neural networks. Measurement 2020, 157, 107651. [Google Scholar] [CrossRef]
- Zhao, M.; Zhong, S.; Fu, X.; Tang, B. Deep residual shrinkage networks for fault diagnosis. IEEE Trans. Ind. Inform. 2020, 16, 4681–4690. [Google Scholar] [CrossRef]
- Zhang, S.; Pan, J.; Han, Z.; Guo, L. Recognition of Noisy Radar Emitter Signals Using a One-Dimensional Deep Residual Shrinkage Network. Sensors 2021, 21, 7973. [Google Scholar] [PubMed]
- Zhang, L.; Yang, X.; Liu, H.; Zhang, H.; Cheng, J. Efficient Residual Shrinkage CNN Denoiser Design for Intelligent Signal Processing: Modulation Recognition, Detection, and Decoding. IEEE J. Sel. Areas Commun. 2021, 40, 97–111. [Google Scholar] [CrossRef]
- Kingma, D.P.; Ba, J. Adam: A method for stochastic optimization. arXiv 2014, arXiv:1412.6980. [Google Scholar]
- Tang, J.T.; Li, H.; Li, J.; Qiang, J.; Xiao, X. Top-Hat transformation and magnetotelluric sounding data strong interference separation of Lujiang-Zongyang ore concentration area. J. Jilin Univ. 2014, 44, 336–343. [Google Scholar]
- Weckmann, U.; Magunia, A.; Ritter, O. Effective noise separation for magnetotelluric single site data processing using a frequency domain selection scheme. Geophys. J. Int. 2005, 161, 635–652. [Google Scholar] [CrossRef]
- Tang, J.T.; Zhou, C.; Wang, X.; Xiao, X.; Lv, Q.T. Deep electrical structure and geological signifcance of Tongling ore district. Tectonophysics 2013, 606, 78–96. [Google Scholar] [CrossRef]






















{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Method | NCC | SNR (dB) |
|---|---|---|
| Wavelet transformation | 0.5961 | 1.4672 |
| VMD | 0.5940 | 1.7107 |
| Our approach | 0.9301 | 8.1591 |
| Number of Blocks | Output Size | ConvNet | ResNet | Our Approach |
|---|---|---|---|---|
| 1 | Input | Input | Input | |
| 1 | Conv (4,3,/2) | Conv (4,3,/2) | Conv (4,3,/2) | |
| 1 | CBU (4,3,/2) | RBU (4,3,/2) | RSBU (4,3,/2) | |
| 3 | CBU (4,3) | RBU (4,3) | RSBU (4,3) | |
| 1 | CBU (8,3,/2) | RBU (8,3,/2) | RSBU (8,3,/2) | |
| 3 | CBU (8,3) | RBU (8,3) | RSBU (8,3) | |
| 1 | CBU (16,3,/2) | RBU (16,3,/2) | RSBU (16,3,/2) | |
| 3 | CBU (16,3) | RBU (16,3) | RSBU (16,3) | |
| 1 | Max Pooling | Max Pooling | Max Pooling | |
| 1 | FC | FC | FC |
| Window Size | Training Loss | Time per Epoch |
|---|---|---|
| 0.0009411 | 1.3154s | |
| 0.0006060 | 1.5766s | |
| 0.0005103 | 3.4094s | |
| 0.0006312 | 4.8007s |
| Method | Training Loss | Time per Epoch |
|---|---|---|
| ConvNet | 0.0012367 | 1.2009s |
| ResNet | 0.0009895 | 1.2858s |
| DRSN | 0.0009411 | 1.3154s |
| Method | NCC | SNR (dB) |
|---|---|---|
| ConvNet | 0.9092 | 7.3796 |
| ResNet | 0.9237 | 8.1638 |
| Our approach | 0.9257 | 8.3184 |
| Method | NCC | SNR (dB) |
|---|---|---|
| ConvNet | 0.9001 | 7.2013 |
| ResNet | 0.9372 | 8.2241 |
| Our approach | 0.9561 | 8.5321 |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2022 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Zuo, G.; Ren, Z.; Xiao, X.; Tang, J.; Zhang, L.; Li, G. Magnetotelluric Noise Attenuation Using a Deep Residual Shrinkage Network. Minerals 2022, 12, 1086. https://doi.org/10.3390/min12091086
Zuo G, Ren Z, Xiao X, Tang J, Zhang L, Li G. Magnetotelluric Noise Attenuation Using a Deep Residual Shrinkage Network. Minerals. 2022; 12(9):1086. https://doi.org/10.3390/min12091086
Chicago/Turabian StyleZuo, Gang, Zhengyong Ren, Xiao Xiao, Jingtian Tang, Liang Zhang, and Guang Li. 2022. "Magnetotelluric Noise Attenuation Using a Deep Residual Shrinkage Network" Minerals 12, no. 9: 1086. https://doi.org/10.3390/min12091086
APA StyleZuo, G., Ren, Z., Xiao, X., Tang, J., Zhang, L., & Li, G. (2022). Magnetotelluric Noise Attenuation Using a Deep Residual Shrinkage Network. Minerals, 12(9), 1086. https://doi.org/10.3390/min12091086