
Source Identification of a Chemical Incident in an Urban Area


Abstract
:1. Introduction
- Simplified methods: These are preliminary estimates based on the characteristics of the incident and meteorological data. They are usually carried out by hand by a trained person.
- Improved methods: These are automatic or manual estimates that are usually made taking into account the type of incident, the place where it occurred, and the weather conditions. They are more accurate than previous ones and update as weather conditions change.
- Methods based on mathematical simulation: These are fully automatic methods that estimate the hazard area by numerical simulation, from the type of incident, meteorological data, and space-time domain information.
2. Materials and Methods
2.1. Numerical Simulation: The State Model
2.2. Optimal Control: The Inverse Problem
- We will assume that the possible release point locations () are in a bounded region given by the union of M convex closed and bounded subsets (admissible release zones):where , , andwhere and are, respectively, the lower and upper bounds for the coordinate of , . Let us empathize that the set can be nonconnected.
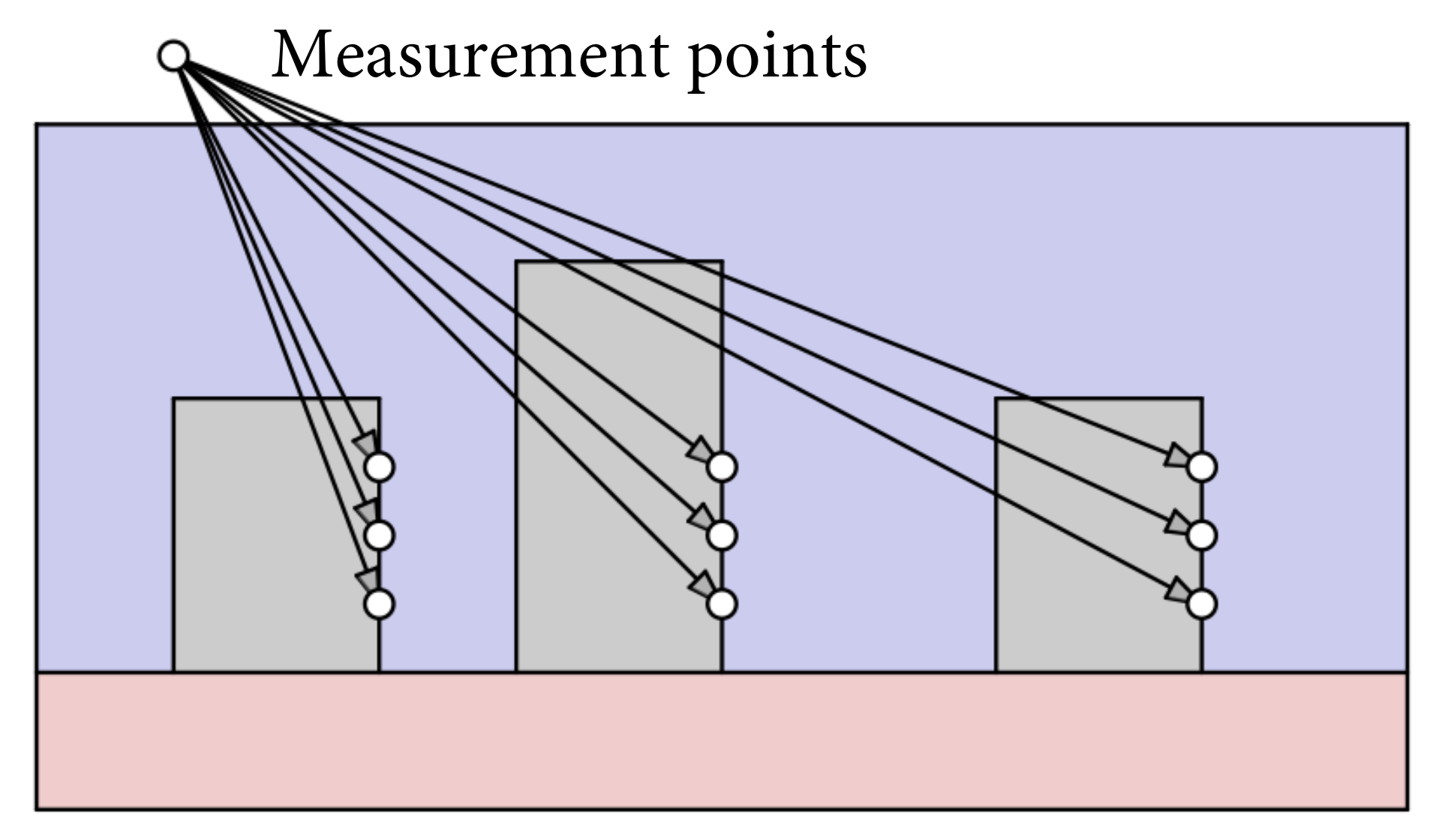
- is the set of measurements taken in the urban area at points , , .
- We consider the following objective function:We must observe that to evaluate the previous function at each element it is necessary to solve the state equation, Equation (7).
- Problem 1. Estimation of the release point: We will estimate the release point assuming that the emission rate of the chemical agent is known:
- Problem 2. Estimation of the release rate: We will estimate the release rate (or the total amount) assuming that the release point is known:
- Problem 3. Estimation of the release point and rate:
- with is such that , therefore:and . Observe that the constraint implies that there is only one 1 in the control vector with the rest of its components being equal to 0. We will denote bythe admissible control set for the discrete variable .
- Given and ,beingObserve that if and satisfies , then .
2.3. Numerical Resolution
- ,
- ,
- .
- Directional derivative of J with respect to and using the adjoint state equation. On the one hand,where, given , , is the solution to:in case (19). In case (18), is such that:
3. Results and Discussion
- Problem 1, Equation (10). Estimation of the release point: In this case, we fix the release rate to and we try to recover the release point using the artificial measurements. To this end, we start from the initial control and run the optimization algorithm in the following cases:In all the above cases, the release point used for the generation of artificial data is recovered by the algorithm.
- Problem 2, Equation (11). Estimation of the release rate: In this case, we fix the release point to and we try to recover the release rate using the artificial measurements. We start from the initial control and run the optimization algorithm in the following cases:
- (a)
- (b)
- Delta approximation (19) and adjoint state Equation (36a): 29 iterations, optimal cost , CPU time 4696 s.
- (c)
- (d)
In all the above cases, the release rate used for the generation of artificial data is recovered by the algorithm. - Problem 3, Equation (12). Estimation of the release point and rate. We try to recover the release point and the release rate using the artificial measurements. We start from the initial control and and run the optimization algorithm in the following cases:
- (a)
- (b)
- Delta approximation (19) and adjoint state Equations (36a) and (36b): 263 iterations, optimal cost , CPU time s.
- (c)
- (d)
In all the above cases, the release rate and point used for the generation of artificial data are recovered by the algorithm.
4. Conclusions
Author Contributions
Funding
Data Availability Statement
Conflicts of Interest
Appendix A
- is the lower boundary of the soil;
- is the interface boundary between air and soil;
- is the interface boundary between soil and buildings;
- is the boundary of buildings associated with roofs;
- is the boundary of buildings associated with walls;
- is the upper boundary of the air;
- is the wind inflow boundary;
- is wind outflow boundary;
- is the lateral boundaries for the air;
- is the lateral boundaries for the soil.
- , and (g m) are the densities of air, soil and buildings, respectively;
- , and (Ws g K) are the specific heat capacities of air, soil and buildings;
- , and (Ws g K) are the thermal conductivities of air, soil and buildings;
- , and (dimensionless constants) are the emissivities of the surfaces corresponding to soil, walls and roofs, respectivel;
- , and (dimensionless constants) are the albedos of soil, walls and roofs, representing the ratio of reflected radiation from the surface to incident radiation upon it;
- , , and (W m K) are the convective heat transfer coefficients between soil/air, soil/buildings, walls/air and roofs/air, respectively.
- , and (m s) are the thermal diffusivities of air, soil and buildings, defined from the above data in the following way:
- , , , , , , and (m s are the coefficients related to convective heat transfer, obtained from the following relations:
- -
- for the temperature of air:
- -
- for the temperature of soil:
- -
- for the temperature of buildings:
- , and (m s K are the coefficients related to radiative heat transfer for soil, walls and roofs, respectively, obtained from following relations:with (W m K the Stefan–Boltzmann constant.
- Finally, in order to compute the radiation temperatures , and on the different solid boundaries (soil, walls and roofs), we use the following expressions (involving the corresponding solar radiations, albedos and emissivities):where denotes the net incident shortwave radiation on the surface, and denotes the downwelling longwave radiation, both measured in W m.
References
- Singh, S.; Sharan, M.; Issartel, J. Inverse modelling methods for identifying unknown releases in emergency scenarios: An overview. Int. J. Environ. Pollut. 2015, 57. [Google Scholar] [CrossRef]
- Lushi, E.; Stockie, J.M. An inverse Gaussian plume approach for estimating atmospheric pollutant emissions from multiple point sources. Atmos. Environ. 2010, 44, 1097–1107. [Google Scholar] [CrossRef] [Green Version]
- Stockie, J. The mathematics of atmospheric dispersion modeling. SIAM Rev. 2011, 53, 349–372. [Google Scholar] [CrossRef]
- Yamamoto, M. Carleman estimates for parabolic equations and applications. Inverse Probl. 2009, 25, 123013. [Google Scholar] [CrossRef]
- Pyatkov, S.G.; Safonov, E.I. On some classes of inverse problems of recovering a source function. Sib. Adv. Math. 2017, 27, 119–132. [Google Scholar] [CrossRef]
- Jiang, D.; Li, Z.; Liu, Y.; Yamamoto, M. Weak unique continuation property and a related inverse source problem for time-fractional diffusion-advection equations. Inverse Probl. 2017, 33, 055013. [Google Scholar] [CrossRef] [Green Version]
- Andrle, M.; Belgacem, F.B.; Badia, A.E. Identification of moving pointwise sources in an advection–dispersion–reaction equation. Inverse Probl. 2011, 27, 025007. [Google Scholar] [CrossRef]
- Andrle, M.; Badia, A.E. Identification of multiple moving pollution sources in surface waters or atmospheric media with boundary observations. Inverse Probl. 2012, 28, 075009. [Google Scholar] [CrossRef]
- Belgacem, F.B. Uniqueness for an ill-posed reaction-dispersion model. Application to organic pollution in stream-waters. Inverse Probl. Imaging 2012, 6, 163–181. [Google Scholar] [CrossRef]
- Hamdi, A. Detection-Identification of multiple unknown time-dependent point sources in a 2D transport equation: Application to accidental pollution. Inverse Probl. Sci. Eng. 2017, 25, 1423–1447. [Google Scholar] [CrossRef]
- Huang, C.H.; Li, J.X.; Kim, S. An inverse problem in estimating the strength of contaminant source for groundwater systems. Appl. Math. Model. 2008, 32, 417–431. [Google Scholar] [CrossRef]
- Gurarslan, G.; Karahan, H. Solving inverse problems of groundwater-pollution-source identification using a differential evolution algorithm. Hydrogeol. J. 2015, 23, 1109–1119. [Google Scholar] [CrossRef]
- Fernández, F.; Alvarez-Vázquez, L.; García-Chan, N.; Martínez, A.; Vázquez-Méndez, M. Optimal location of green zones in metropolitan areas to control the urban heat island. J. Comput. Appl. Math. 2015, 289, 412–425. [Google Scholar] [CrossRef]
- Fernández, F.; Alvarez-Vázquez, L.; Martínez, A.; Vázquez-Méndez, M. A 3D optimal control problem related to the urban heat islands. J. Math. Anal. Appl. 2017, 446, 1571–1605. [Google Scholar] [CrossRef]
- García-Chan, N.; Alvarez-Vázquez, L.; Martínez, A.; Vázquez-Méndez, M. On optimal location and management of a new industrial plant: Numerical simulation and control. J. Frankl. Inst. 2014, 351, 1356–1371. [Google Scholar] [CrossRef]
- Lions, J.L. Contrôle Optimal de Systèmes Gouvernés par des Équations aux Dérivées Partielles; Dunod: Paris, France, 1968. [Google Scholar]
- Duran, M.; Grossmann, I. An outer-approximation algorithm for a class of mixed-integer nonlinear programs. Math. Program. 1986, 36, 307–339. [Google Scholar] [CrossRef]
- Quesada, I.; Grossmann, I. An LP/NLP based branch and bound algorithm for convex MINLP optimization problems. Comput. Chem. Eng. 1992, 16, 937–947. [Google Scholar] [CrossRef]
- Bonami, P.; Biegler, L.T.; Conn, A.R.; Cornuéjols, G.; Grossmann, I.E.; Laird, C.D.; Lee, J.; Lodi, A.; Margot, F.; Sawaya, N.; et al. An algorithmic framework for convex mixed integer nonlinear programs. Discret. Optim. 2008, 5, 186–204. [Google Scholar] [CrossRef]
- Wächter, A.; Biegler, L.T. On the implementation of an interior-point filter line-search algorithm for large-scale nonlinear programming. Math. Program. 2006, 106, 25–57. [Google Scholar] [CrossRef]
- Bermúdez, A.; Nogueiras, M.R.; Vázquez, C. Numerical analysis of convection-diffusion-reaction problems with higher order characteristics/finite elements. I. Time discretization. SIAM J. Numer. Anal. 2006, 44, 1829–1853. [Google Scholar] [CrossRef]
- Bermúdez, A.; Nogueiras, M.R.; Vázquez, C. Numerical analysis of convection-diffusion-reaction problems with higher order characteristics/finite elements. II. Fully discretized scheme and quadrature formulas. SIAM J. Numer. Anal. 2006, 44, 1854–1876. [Google Scholar] [CrossRef]
- Hecht, F. New development in FreeFem++. J. Numer. Math. 2012, 20, 251–265. [Google Scholar] [CrossRef]
- Alvarez-Vázquez, L.J.; Martínez, A.; Rodríguez, C.; Vázquez-Méndez, M.E. Mathematical analysis of the optimal location of wastewater outfalls. IMA J. Appl. Math. 2002, 67, 23–39. [Google Scholar] [CrossRef]
- Scott, R. Finite element convergence for singular data. Numer. Math. 1973, 21, 317–327. [Google Scholar] [CrossRef]
- Braack, M.; Mucha, P.B. Directional no-nothing condition for the Navier-Stokes equations. J. Comput. Math. 2014, 32, 507–521. [Google Scholar]








{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Coefficient | Air | Asphalt | Buildings |
|---|---|---|---|
| Density | |||
| Specific heat | |||
| Conductivity | |||
| Emissivity | |||
| Albedo |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2021 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Fernández, F.J.; Vázquez-Méndez, M.E. Source Identification of a Chemical Incident in an Urban Area. Axioms 2021, 10, 177. https://doi.org/10.3390/axioms10030177
Fernández FJ, Vázquez-Méndez ME. Source Identification of a Chemical Incident in an Urban Area. Axioms. 2021; 10(3):177. https://doi.org/10.3390/axioms10030177
Chicago/Turabian StyleFernández, Francisco J., and Miguel E. Vázquez-Méndez. 2021. "Source Identification of a Chemical Incident in an Urban Area" Axioms 10, no. 3: 177. https://doi.org/10.3390/axioms10030177
APA StyleFernández, F. J., & Vázquez-Méndez, M. E. (2021). Source Identification of a Chemical Incident in an Urban Area. Axioms, 10(3), 177. https://doi.org/10.3390/axioms10030177