
Stability Analysis of a Patchy Predator–Prey Model with Fear Effect

{kind=link}
{kind=link}
Abstract
:1. Introduction
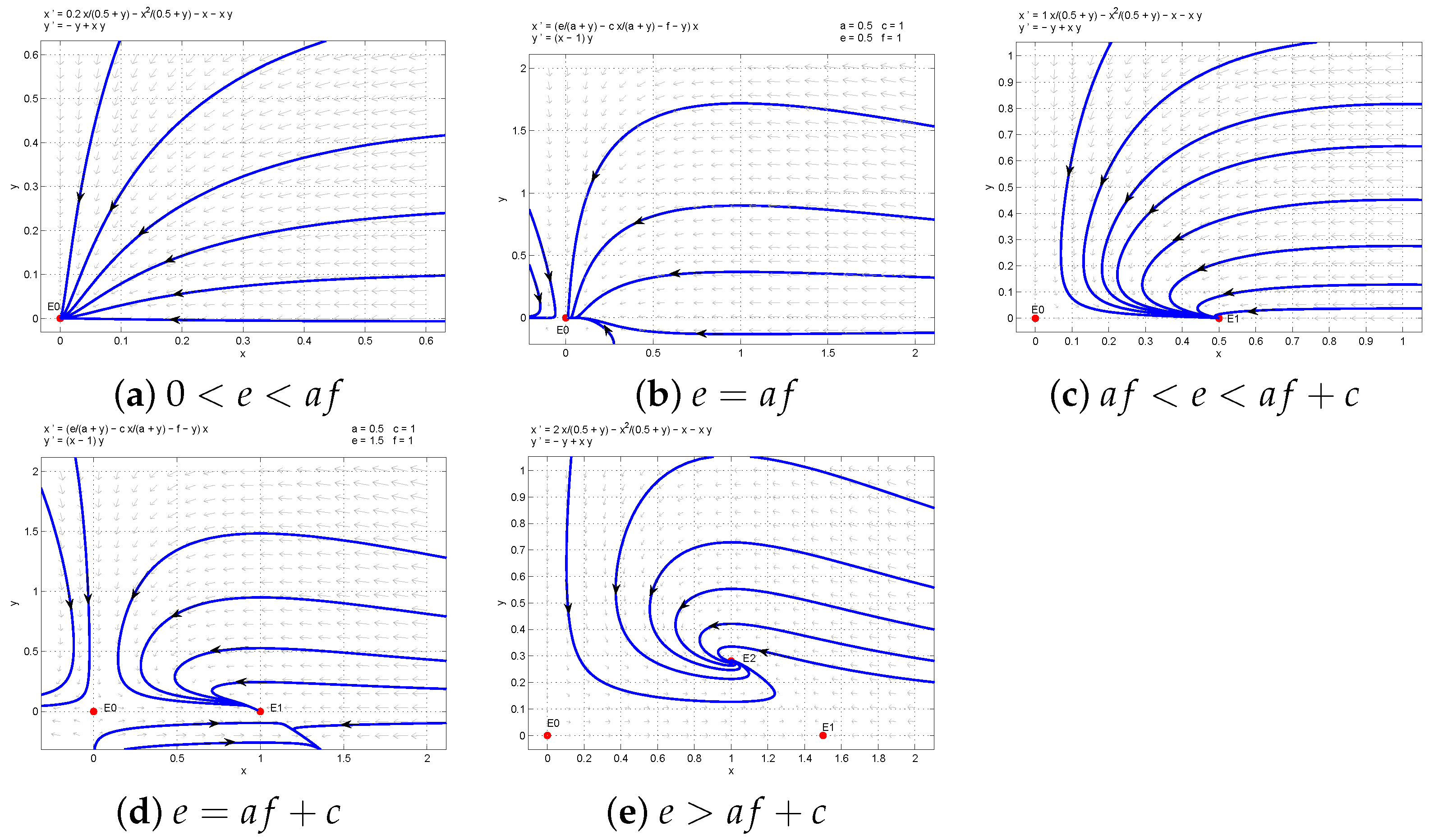
2. Existence and Local Stability of Equilibrium
- (1)
- System (4) always has a trivial equilibrium .
- (a)
- If , is a hyperbolic stable node;
- (b)
- If , is an attracting saddle-node;
- (c)
- If , is a hyperbolic saddle.
- (2)
- If , system (4) has a boundary equilibrium Here, .
- (a)
- If , is a hyperbolic stable node;
- (b)
- If , is an attracting saddle-node;
- (c)
- If , is a hyperbolic saddle.
- (3)
- When , system (4) has a unique positive equilibrium , which is always asymptotically stable.
3. Global Stability of Equilibrium
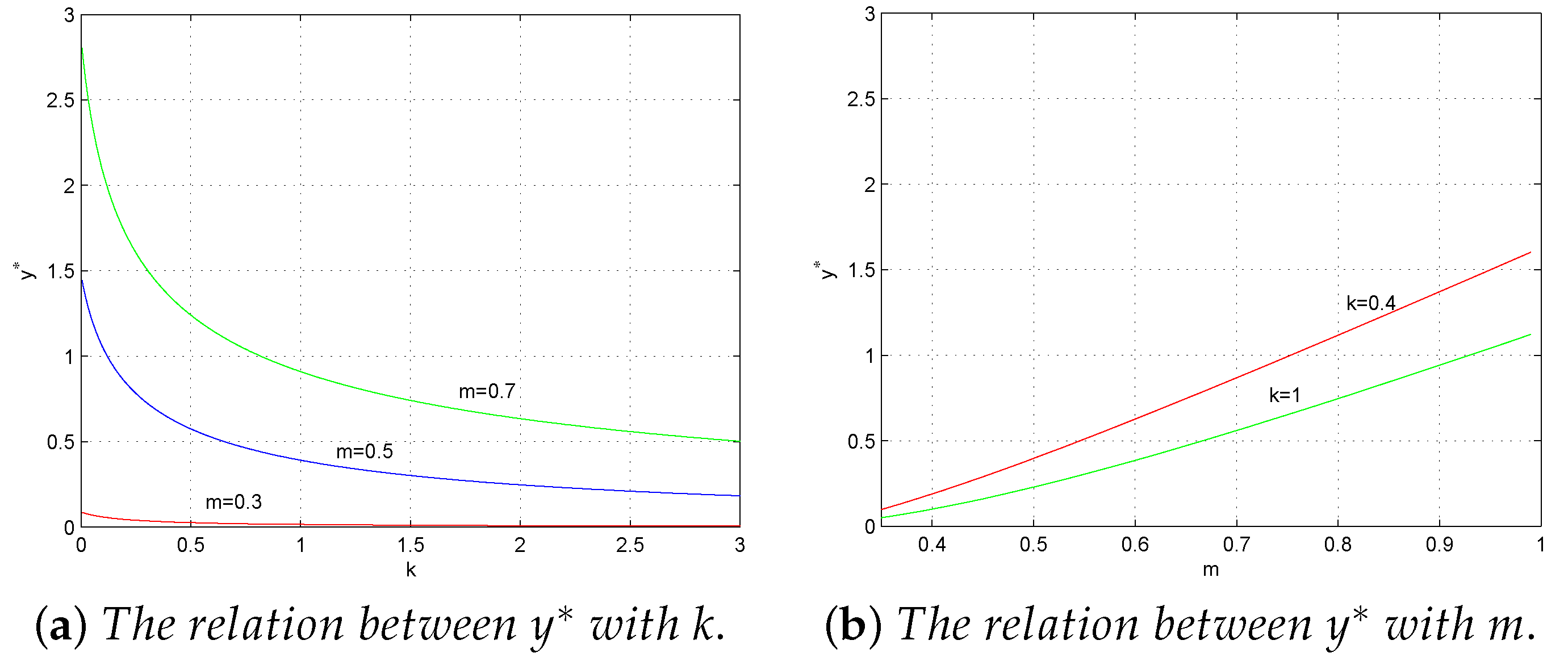
4. The Impact of Fear Effect and Dispersal
4.1. The Impact of Fear Effect on the Predator Density
4.2. The Impact of Dispersal on the Predator Density
5. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Acknowledgments
Conflicts of Interest
References
- Xiao, Z.W.; Li, Z. Stability and bifurcation in a stage-structured predator-prey model with Allee effect and time delay. IAENG Int. J. Appl. Math. 2019, 49, 6–13. [Google Scholar]
- McNair, J.N. The effects of refuges on predator-prey interactions: A reconsideration. Theor. Popul. Biol. 1986, 29, 38–63. [Google Scholar] [CrossRef]
- Briggs, C.J.; Hoopes, M.F. Stabilizing effects in spatial parasitoid-host and predator-prey models: A review. Theor. Popul. Biol. 2004, 65, 299–315. [Google Scholar] [CrossRef] [PubMed]
- Chen, F.D.; Chen, L.J.; Xie, X.D. On a Leslie-Gower predator-prey model incorporating a prey refuge. Nonlinear Anal. Real World Appl. 2009, 10, 2905–2908. [Google Scholar] [CrossRef]
- Lima, S.L. Nonlethal Effects in the Ecology of Predator-Prey Interactions. BioScience 1998, 48, 25–34. [Google Scholar] [CrossRef] [Green Version]
- Beretta, E.; Solimano, F.; Takeuchi, Y. Global stability and periodic orbits for two-patch predator-prey diffusion-delay models. Math. Biosci. 1987, 85, 153–183. [Google Scholar] [CrossRef]
- Kuang, Y.; Takeuchi, Y. Predator-prey dynamics in models of prey dispersal in two-patch environments. Math. Biosci. 1994, 120, 77–98. [Google Scholar] [CrossRef]
- Aly, S.; Farkas, M. Bifurcations in a predator–prey model in patchy environment with diffusion. Nonlinear Anal. Real World Appl. 2004, 5, 519–526. [Google Scholar] [CrossRef]
- Souna, F.; Djilali, S.; Lakmeche, A. Spatiotemporal behavior in a predator–prey model with herd behavior and cross-diffusion and fear effect. Eur. Phys. J. Plus 2021, 136, 1–21. [Google Scholar] [CrossRef]
- Michalski, J.; Poggiale, J.-C.; Arditi, R.; Auger, P. Macroscopic Dynamic Effects of Migrations in Patchy Predator-prey Systems. J. Theor. Biol. 1997, 185, 459–474. [Google Scholar] [CrossRef]
- El Abdllaoui, A.; Auger, P.; Kooi, B.W.; de la Parra, R.B.; Mchich, R. Effects of density-dependent migrations on stability of a two-patch predator–prey model. Math. Biosci. 2007, 210, 335–354. [Google Scholar] [CrossRef] [PubMed]
- Ma, Z.; Wang, S.; Li, W.; Li, Z. The effect of prey refuge in a patchy predator–prey system. Math. Biosci. 2013, 243, 126–130. [Google Scholar] [CrossRef] [PubMed]
- Rani, R.; Gakkhar, S.; Moussaoui, A. Dynamics of a fishery system in a patchy environment with nonlinear harvesting. Math. Methods Appl. Sci. 2019, 42, 7192–7209. [Google Scholar] [CrossRef]
- Liu, Z.G. The effect of prey refuge in a patchy Leslie-Gower predation system. Acta Ecol. Sin. 2018, 38, 2958–2964. [Google Scholar]
- Wang, X.; Zanette, L.; Zou, X. Modelling the fear effect in predator–prey interactions. J. Math. Biol. 2016, 73, 1179–1204. [Google Scholar] [CrossRef]
- Wang, X.; Zou, X. Modeling the Fear Effect in Predator–Prey Interactions with Adaptive Avoidance of Predators. Bull. Math. Biol. 2017, 79, 1325–1359. [Google Scholar] [CrossRef]
- Sasmal, S. Population dynamics with multiple Allee effects induced by fear factors-a mathematical study on prey-predator. Appl. Math. Model. 2018, 64, 1–14. [Google Scholar] [CrossRef]
- Xiao, Z.W.; Li, Z. Stability analysis of a mutual interference predator-prey model with the fear effect. J. Appl. Sci. Eng. 2019, 6, 205–211. [Google Scholar]
- Kumar, V.; Kumar, N. Stability and bifurcation analysis of Hassell-Varley prey-predator system with fear effect. Appl. Math. Comput. 2020, 22, 150–170. [Google Scholar] [CrossRef]
- Das, M.; Samanta, G.P. A prey-predator fractional order model with fear effect and group defense. Int. J. Dyn. Control 2020, 9, 334–349. [Google Scholar] [CrossRef]
- Liu, T.T.; Chen, L.J.; Chen, F.D.; Li, Z. Stability analysis of a Leslie-Gower model with strong Allee effect on prey and fear effect on predator. Int. J. Bifurc. Chaos 2022, 32, 2250082. [Google Scholar] [CrossRef]
- Biktashev, V.N.; Brindley, J.; Holden, A.V.; Tsyganov, M.A. Pursuit-evasion predator-prey waves in two spatial dimensions. Chaos: Interdiscip. J. Nonlinear Sci. 2004, 14, 988–994. [Google Scholar] [CrossRef] [Green Version]
- Bogoliubov, N.N.; Mitropolsky, Y.A. Asymptotic Methods in the Theory of Nonlinear Oscillations, Gordon and Breach; CRC Press: New York, NY, USA, 1961. [Google Scholar]
- Iwasa, Y.; Andreasen, V.; Levin, S. Aggregation in model ecosystems. I. Perfect aggregation. Ecol. Model. 1987, 37, 287–302. [Google Scholar] [CrossRef]
- Iwasa, Y.; Levin, S.; Andreasen, V. Aggregation in Model Ecosystems II. Approximate Aggregation. Math. Med. Biol. A J. IMA 1989, 6, 1–23. [Google Scholar] [CrossRef]
- Zhang, Z.F.; Ding, T.R.; Huang, W.Z.; Dong, Z.X. Qualitative Theory of Differential Equation; Science Press: Beijing, China, 1992; Volume 101. (In Chinese) [Google Scholar]
- Zhang, H.; Cai, Y.; Fu, S.; Wang, W. Impact of the fear effect in a prey-predator model incorporating a prey refuge. Appl. Math. Comput. 2019, 356, 328–337. [Google Scholar] [CrossRef]
- Waezizadeh, T.; Mehrpooya, A. A stochastic model for dynamics of two populations and its stability. In Proceedings of the 47th Annual Iranlan Mathematics Conference, Kharazmi University, Karaj, Iran, 28–31 August 2016. [Google Scholar]
- Gokila, C.; Sambath, M.; Balachandran, K.; Ma, Y.-K. Analysis of Stochastic Predator-Prey Model with Disease in the Prey and Holling Type II Functional Response. Adv. Math. Phys. 2020, 2020, 3632091. [Google Scholar] [CrossRef]
- Hosseini1, K.; Sadri1, K.; Mirzazadeh, M.; Salahshour, S.; Park, C.; Lee, J.R. The Guava Model Involving the Conformable Derivative and its Mathematical Analysis. Fractals 2022. [Google Scholar] [CrossRef]


Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2022 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Liu, T.; Chen, L. Stability Analysis of a Patchy Predator–Prey Model with Fear Effect. Axioms 2022, 11, 577. https://doi.org/10.3390/axioms11100577
Liu T, Chen L. Stability Analysis of a Patchy Predator–Prey Model with Fear Effect. Axioms. 2022; 11(10):577. https://doi.org/10.3390/axioms11100577
Chicago/Turabian StyleLiu, Tingting, and Lijuan Chen. 2022. "Stability Analysis of a Patchy Predator–Prey Model with Fear Effect" Axioms 11, no. 10: 577. https://doi.org/10.3390/axioms11100577
APA StyleLiu, T., & Chen, L. (2022). Stability Analysis of a Patchy Predator–Prey Model with Fear Effect. Axioms, 11(10), 577. https://doi.org/10.3390/axioms11100577