1. Introduction
Graph drawing is a representation of graphs on Euclidean space such that vertices of the graph are points in Euclidean space and edges are lines or curves between vertices. According to the way of getting the coordinates of vertices, graph drawing algorithms can be divided into two categories: dynamic drawings and deterministic drawings. For dynamic drawings, the coordinates of vertices are usually given by the process of optimizing some potential energy function. For deterministic drawings, the coordinates of the vertices are given by an explicit formula directly.
The spectral drawing algorithm [
1,
2] is one of most well-known deterministic drawings based on the spectra of graphs. It is also the optimizing drawing respect to the certain potential energy function. Roughly speaking, the spectral drawing is the shortest length drawing among all orthogonal projections drawing. (See
Section 1 for details).
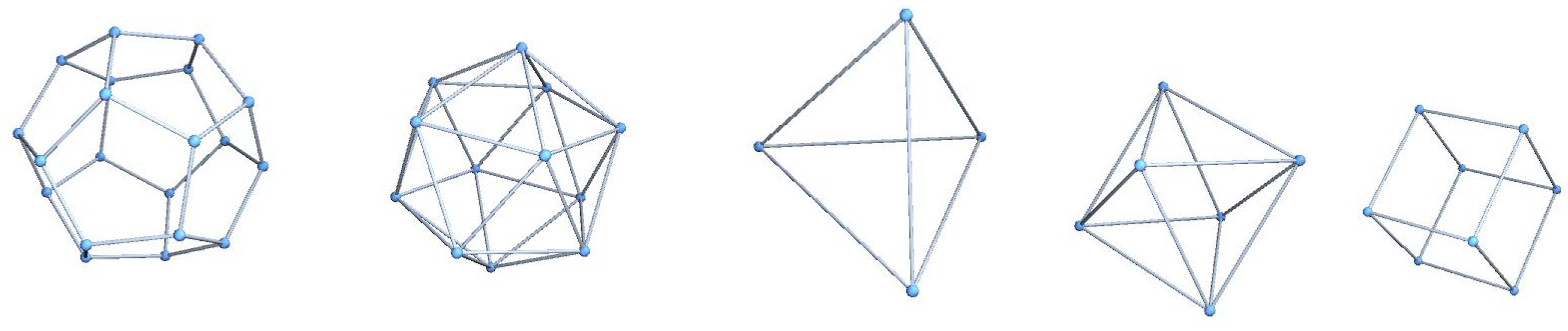
In general, the spectral drawing can draw the highly symmetric planar graph well. For example,
Figure 1 shows spectral drawings of the underlying graph of the skeletons of the Platonic solids.
In these examples, the spectral drawing naturally induces an embedding of the graph into the unit sphere in three-dimensional Euclidean space as shown in
Figure 2.
However, the spectral drawing does not work well for highly symmetric non-planar graphs. For a non-planer graph, it can be embedded on a closed surface of some genus. When it can be embedded on a surface of genus one, namely a torus, it is called a toroidal graph. For example, the complete graphs
,
, and
are toroidal graphs. In addition, the Heawood graph and the Peterson graph are also toroidal graphs. Furthermore, there are several infinite families of toroidal Cayley graphs [
3]. For those well-known toroidal graphs, their embedding onto a torus can be found in many literature, e.g., [
4]. However, there is no systemic way to obtain these embeddings.
There are several studies of drawing graphs on a torus [
5,
6,
7]. However, these approaches do not give explicit drawings directly and they also require the extra structure of graphs, namely the choice of the set of “faces” (or so-called rotation systems).
The main contribution of the paper is to give a deterministic drawing algorithm for highly symmetric toroidal graphs without using any extra structure. The main idea is that for a highly symmetric toroidal graph, we expect that it admits a “shortest-length” drawing on a torus, which can be canonically induced from the usual spectral drawing. We will use vertex-transitive toroidal graphs as our examples, including , , , , the Heawood graph, some generalized Petersen graphs, and toroidal fullerence graph. For these toroidal graphs, our algorithm gives each of them an embedding on a torus except for generalized Petersen graphs.
2. Spectral Drawing Revisited
In this section, we recall the spectral drawing algorithm and explain why it works well for highly symmetric planar graphs like the skeletons of the platonic solids. Let be a connected undirected graph with n vertices.
2.1. Symmetric Drawings
A straight-line drawing of onto the inner product space is a map from to W such that
the vertex v is represented by the point .
the edge is represented by the straight line segment between and .
We say
is a symmetric drawing if for any graph automorphism
of
, there exists a linear isometry
of
W such that for all
,
In other words, a symmetric drawing preserves all symmetries of the graph.
2.2. Regular Drawings
Let
be a real inner product space with an orthonormal basis
. The regular drawing
of
is a straight-line drawing onto
which maps
v to
. For an automorphism
of
, let
be a linear transformation on
characterized by
Since
permutes the orthonormal basis, it is an isometry. In addition, we have
We conclude that is a symmetric drawing.
2.3. Spectral Drawing Algorithm
The Laplacian operator
L of
is a linear transformation on
characterized by
The Laplacian operator is positive semi-definite with eigenvalues
Let
be the corresponding orthonormal eigenbasis such that
for all
i. Let
be the
k-dimensional subspace of
spanned by
. The
k-dimensional spectral drawing
is a straight-line drawing given by
Here is the orthogonal projection onto .
2.4. Potential Energy Function of Spectral Drawing Algorithm
Given a
k-dimensional subspace
W of
, define the energy function of
W as
Suppose
is an orthonormal basis of
W. Then we have
Hence, one can rewrite the energy function as
Therefore, subject to the condition , is minimal if W is spanned by eigenvectors of L corresponding to . In other words, the k-dimensional spectral drawing has the minimal energy among all drawings arising from the projections onto k-dimensional subspaces.
2.5. Spectral Drawings and Symmetric Drawings
The following theorem shows when the spectral drawing is a symmetric drawing.
Theorem 1. When is a direct sum of eigenspaces of L, is invariant for any automorphism σ of and is a symmetric drawing.
Proof. Let
be an automorphism of
. First, let us show that the isometry
and
L commute. For any
,
Next, we show that
is
-invariant. Suppose
is a
-eigenvector of
L in
. Then
Therefore,
is also a
-eigenvector and it is contained in
. We conclude that
is
-invariant, or equivalently
and
commute. Finally, set
. Then for all
,
Therefore, is a symmetric drawing. □
Example 1. When is the underlying graph of the skeleton of a platonic solid, we always have . (This can be verified by direct computation.) Therefore, the 3-dimensional spectral drawing of is a symmetric drawing.
2.6. Partially Symmetric Drawing
Note that the subspace is not unique when is not a direct sum of eigenspace of L. For example, when , then can be any three dimensional subspace of . In this case, we need an extra structure to obtain a good choice of .
To do so, fix an automorphism
of
and let
be the isometry on
given in
Section 2.2. Then the restriction of
on
is still an isometry. Recall the following theorem of linear isometries.
Theorem 2 ([
8] Theorem 6.46)
. Let T be a linear isometry on a nonzero-real finite dimensional real inner product space W. Then there exists a collection of pairwise orthogonal T-invariant subspaces of V such that- (a)
or 2 for all i.
- (b)
.
- (c)
When , or .
- (d)
When , is a rotation with non-real eigenvalues. In this case, is is called a rotational plane of T.
Applying the above theorem to all eigenspaces of L, we have the following result.
Theorem 3. Given an isometry σ of , there exists a decomposition such that for all i,
- 1.
is contained in some eigenspace of L.
- 2.
is -invariant.
- 3.
is either of one dimension or it is a rotational plane of .
Note that for a rotational plane in the above theorem, the projection from to induces a planar drawing of the graph which preserves the symmetry . In this case, we say the resulted drawing is partially symmetric.
3. Toroidal Graph Drawing
In this section, we propose a deterministic algorithm to draw highly symmetric toroidal graphs on a torus. We shall use as the model of the torus.
3.1. The Drawing Algorithm
Let be an undirected connected graph with the set of vertices . Fix an automorphism of , which can be chosen to be of maximal order or any specific symmetry that we would like to preserve. Suppose that contains at least two rotational planes. The following is our proposed algorithm.
- 1.
Find two mutually orthogonal rotational plane and of such that each is contained in some eigenspace of L with the smallest possible .
- 2.
Find an orthonormal basis of and an orthonormal basis of .
- 3.
Write
. Define a map
given by
which satisfies the following condition.
Remark 1. When or equals to zero, set or to be zero respectively.
- 4.
For each edge , draw a shortest straight line segment between and in the space . (If the shortest straight line segments are not unique, just choose one of them.) Then we obtain a drawing of on the torus . In addition, combing with the standard parametric equation of the torus in , one can also obtain a drawing on .
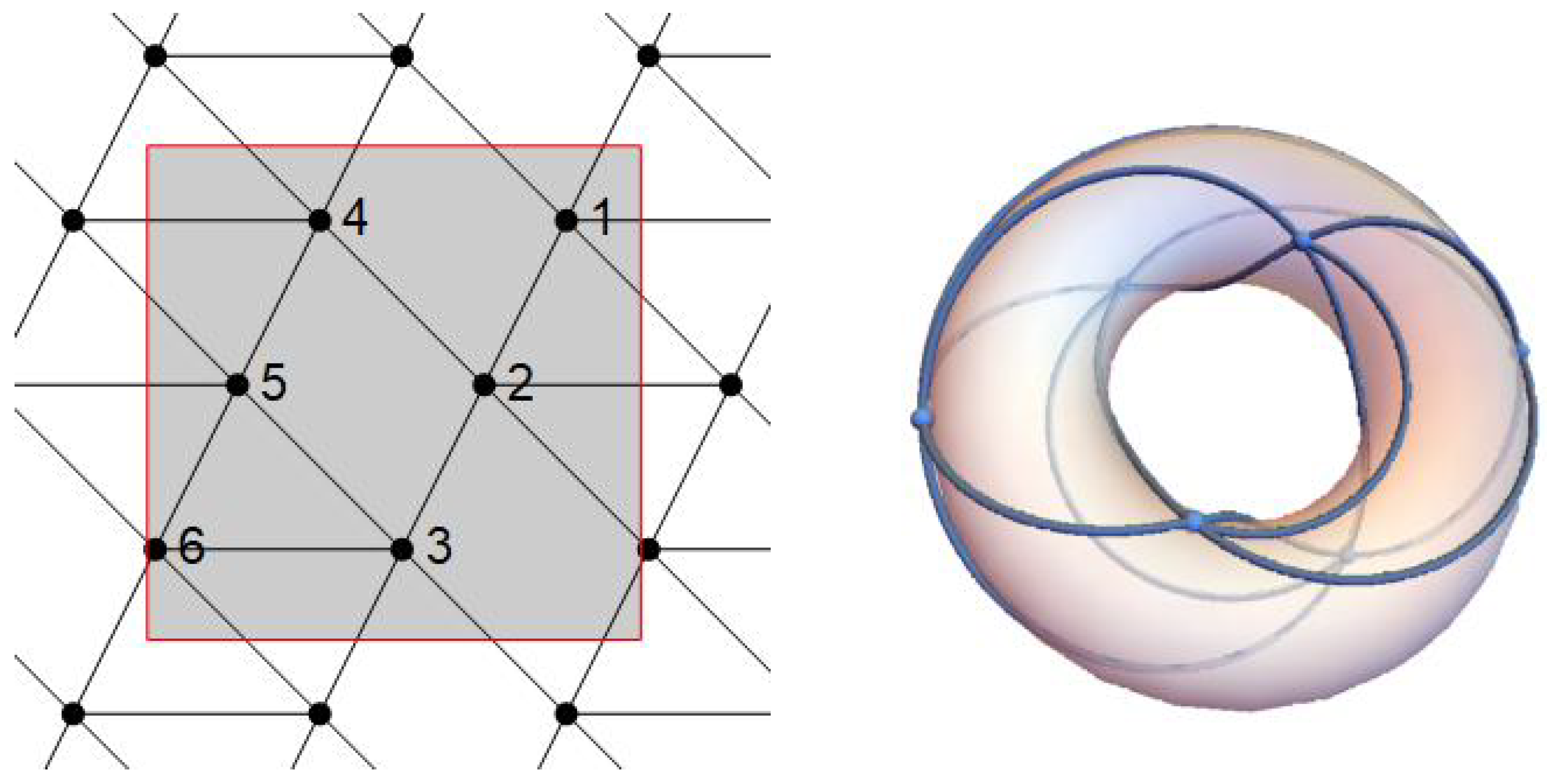
3.2. Examples
In the following examples, we not only draw the graph on
but also draw the graph on the torus in
using the parametrization
with
.
Example 2. For the graph with n = 5, 6, or 7, the second smallest eigenvalue of L equals n, which is of dimension . Label the vertices by 1
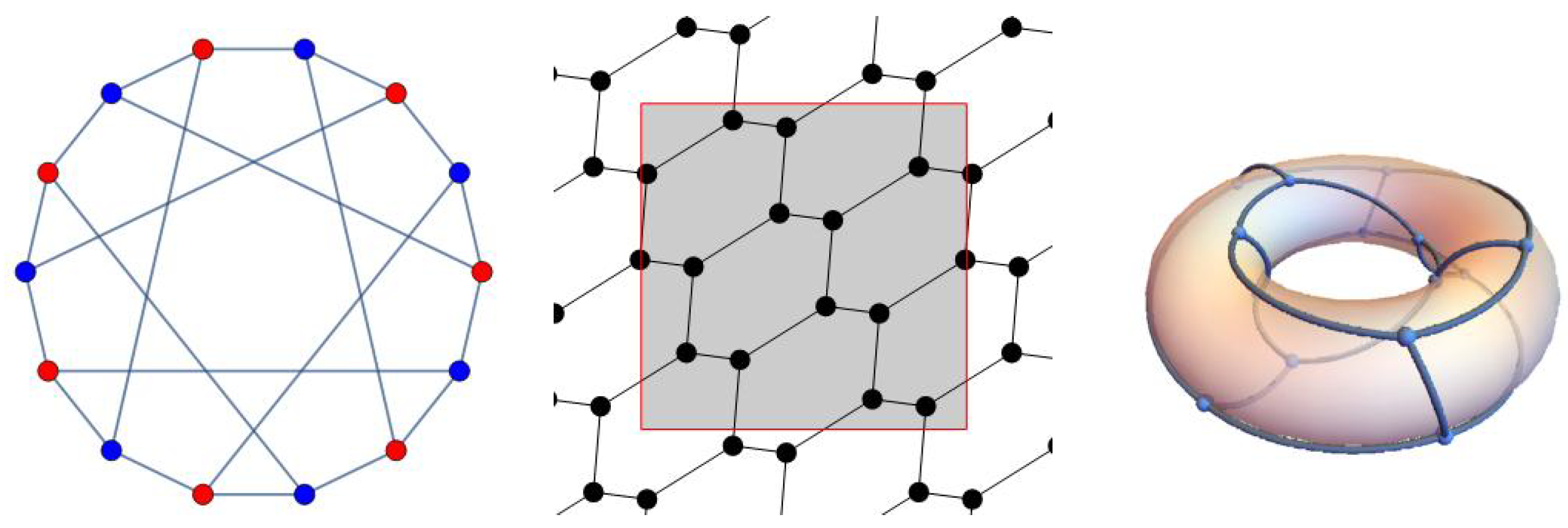
to n and let be an automorphism of which is of order n. Choose and to be any two orthogonal rotational planes of in which will be used in the step 1 of the algorithm. The following figures show the drawing obtained by our algorithm, where the gray area is the fundamental domain of in In this case, the result drawing of gives an embedding on a torus as shown in Figure 3, Figure 4 and Figure 5. Example 3. For the bipartie graph , the eigenvalues of the Laplacian are Label the vertices as shown in the following figure and let be an automorphism on . Choose and to be two orthogonal rotational planes of in . In this case, the result drawing of gives an embedding on a torus as shown in Figure 6. Example 4. Let be the Heawood graph which is a bipartite graph with the vertex set . Here
is the set of 1-dimensional subspaces in which cardinality equals to 7;
is the set of 2-dimensional subspaces in which cardinality equals to 7;
for and , and are adjacent if as a subspace of .
Here, is the finite field with 2 elements. The automorphism group of contains the group PGL as an index two subgroup of order 168. The spectrum of the Laplacian of is Let which is an element of order 7 in PGL. Choose and to be two orthogonal rotational planes of in the 6-dimensional subspace . In this case, the result drawing of the Heawood graph gives an embedding on a torus as shown in Figure 7. Example 5. Let be the generalized Petersen graph which vertex set is , , and the edge is were subscripts are to be read modulo n. Let σ be the automorphism on given by and for all i. There are three torodial edge-transitive petersen graphs, namely the Petersen graph , the Möbius–Kantor graph , and the Nauru graph .
- 1.
For the Petersen graph , the second smallest eigenvalue of the Laplacian equals 2, which is of dimension 5. Let and be two rotational planes of on . However, in the resulted drawing as shown in Figure 8, 10 vertices are divided into 5 pairs and each pair maps to one point. - 2.
For the Möbius–Kantor graph , the second smallest eigenvalue of the Laplacian equals , which is of dimension 4.
Let and be two rotational planes of σ on . However, in the resulted drawing as shown in Figure 9, 16 vertices are divided into 8 pairs and each pair maps to one point. - 3.
For the Nauru graph , the second smallest eigenvalue of the Laplacian equals , which is of dimension 4.
Let and be two rotational planes of σ on . However, in the resulted drawing as shown in Figure 10, 24 vertices are divided into 12 pairs and each pair maps to one point.
For torodial generalized Petersen graphs and this particular σ, our algorithm does not give an embedding onto a torus. One may choose a different σ to obtain a different drawing. However, unlike other examples, none of σ induces an embedding onto a torus.
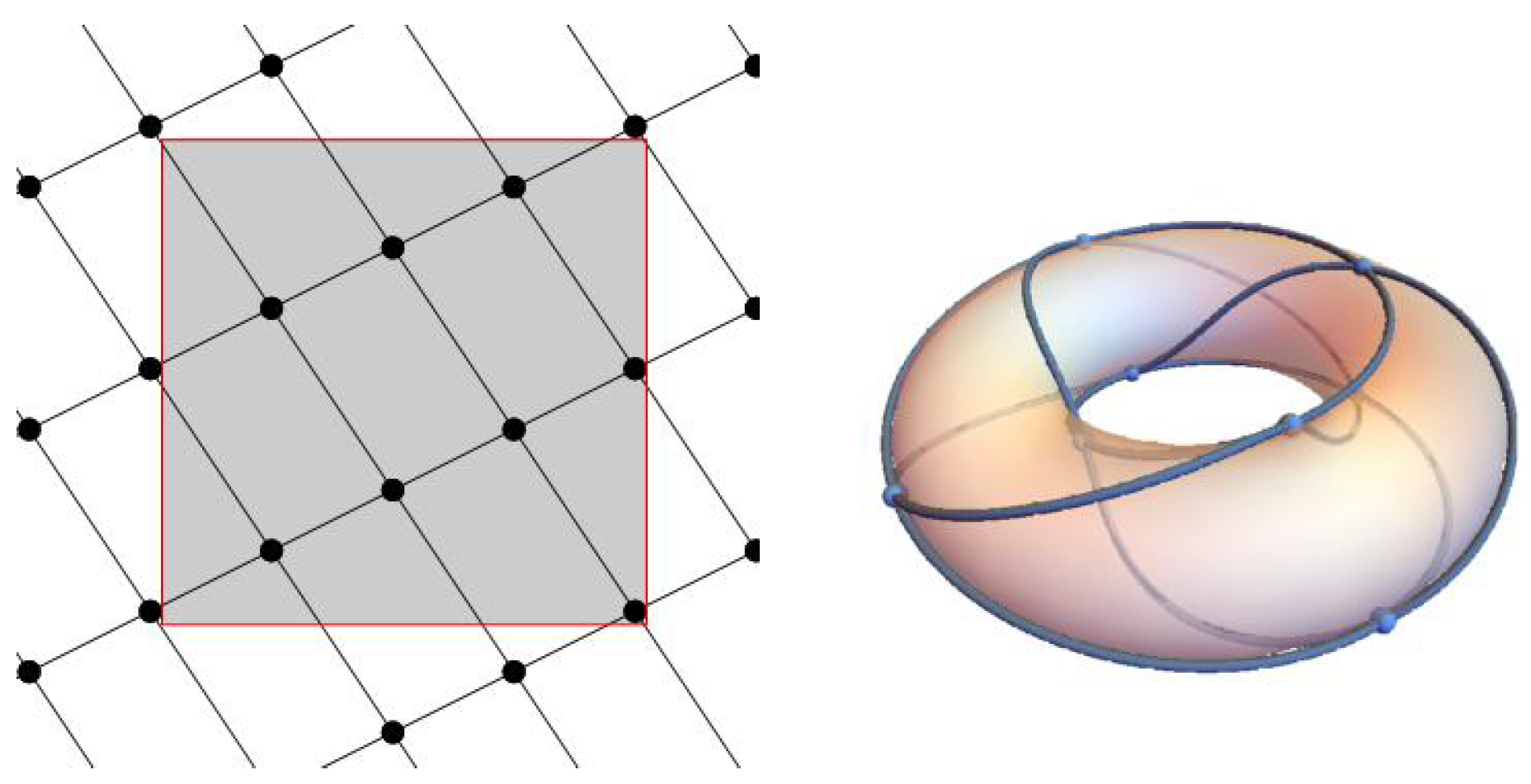
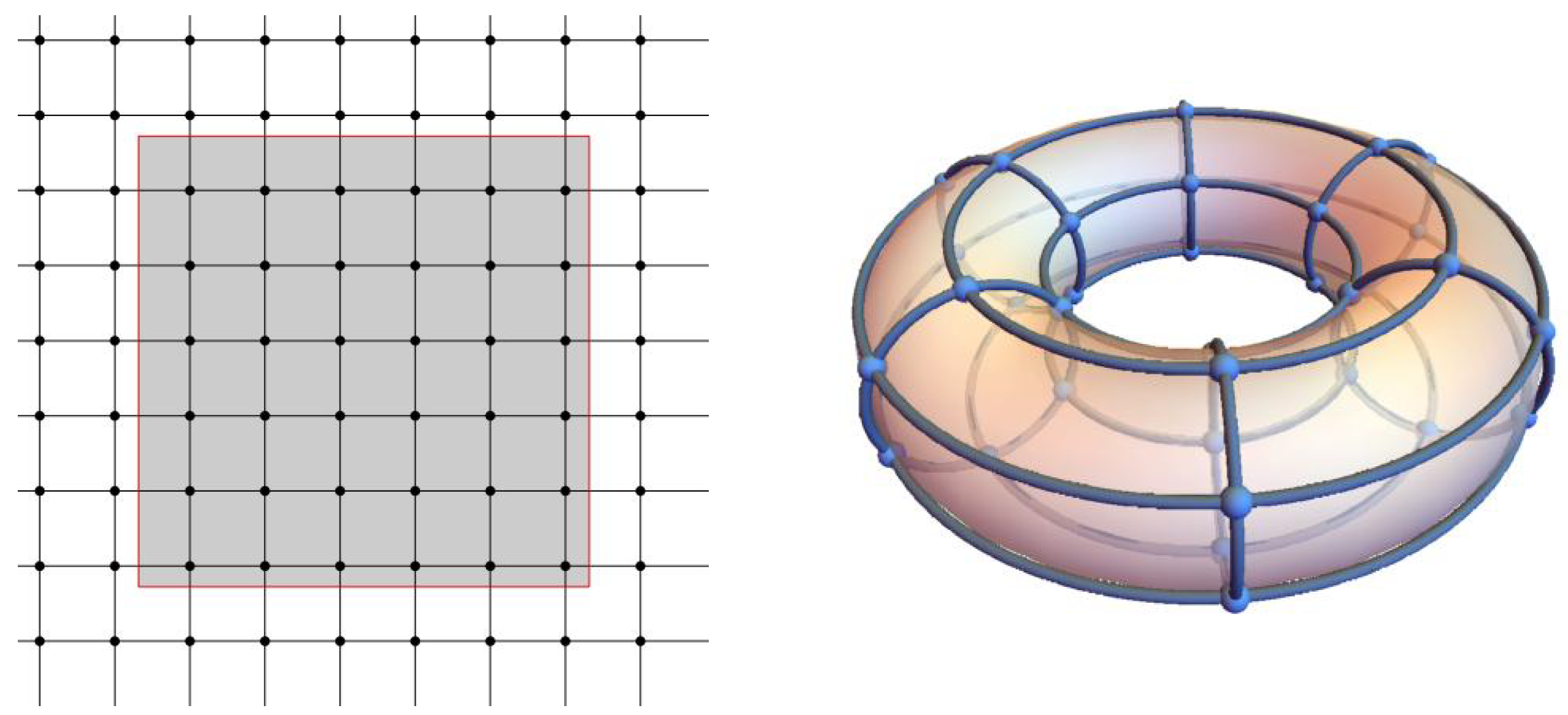
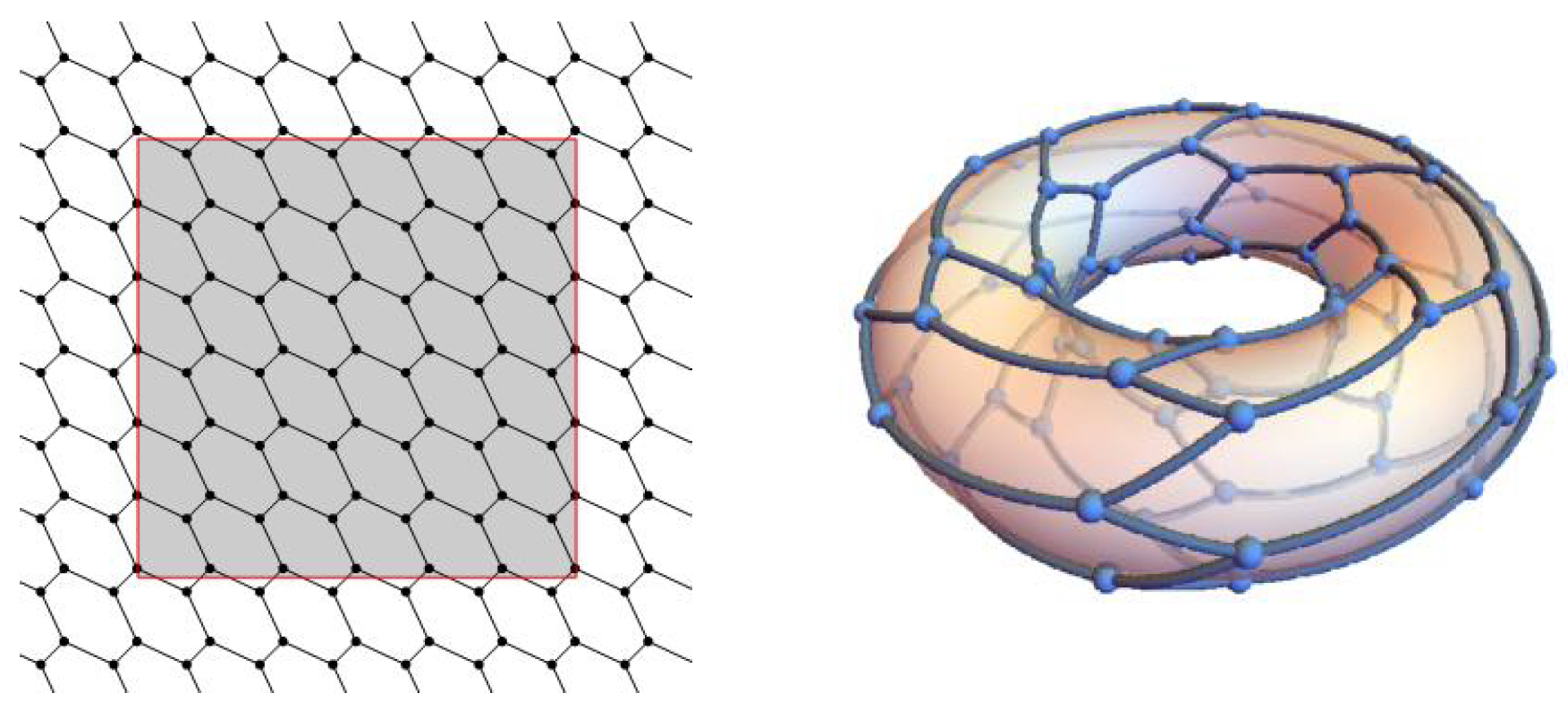
Example 6. Let and . The Cayley graph of is a rectangular mesh on a torus. The spectrum of the Laplacian L is given by In this case, we can simply set and and the result drawing of the Cayley graph X gives an embedding on a torus as shown in Figure 11. Set In this case, can be decomposed as a direct sum of two orthogonal rotational planes and of . In this case, the result drawing of the Cayley graph X gives an embedding on a torus as shown in Figure 12. Note that the symmetric drawing of the Cayley graph in this example has been studied in the 3-sphere in [9,10]. Example 7. Let G be a group of isometries on generated by three isometries: Let N be a translation subgroup spanned by and for some . In this case N is a normal subgroup of G and the Cayley graph of is a so-called toroidal fullerence. The spectrum of the Laplacian can be found in [11] Especially, when and , the spectrum of the Laplacian is given by Set In this case, the six dimensional subspace can be decomposed as a direct sum of three rotational planes of . We choose and as any two of them. In this case, the result drawing of the Cayley graph X gives an embedding on a torus as shown in Figure 13. In this case, we can simply set
and
and the result drawing of the Cayley graph
X gives an embedding on a torus as shown in
Figure 14.
4. Further Works
In this paper, we provide a simple algorithm to draw torodial graphs on three-dimensional Euclidean space. The main idea is to express the torus as a product of two 1-spheres , which can be regarded a subset of .
However, our method can not apply to graphs of high genus since there is no simple way to describe closed surfaces of high genus in three-dimensional Euclidean space.
In the future, we would like to study graphs of genus two as the starting point. Such graphs shall be drawn on the so-called double torus. Unlike the usual torus, the double torus is a quotient of the hyperbolic plane. Therefore, the a new method must be developed.
Author Contributions
Conceptualization, M.-H.K.; methodology, M.-H.K.; validation, J.-W.G.; formal analysis, J.-W.G.; investigation, J.-W.G.; writing—original draft preparation, J.-W.G.; writing—review and editing, M.-H.K.; visualization, J.-W.G.; supervision, M.-H.K. All authors have read and agreed to the published version of the manuscript.
Funding
This research was funded by Ministry of Science and Technology(Taiwan) of grant number 108-2115-M-009-007-MY2.
Institutional Review Board Statement
Not applicable.
Informed Consent Statement
Not applicable.
Data Availability Statement
Not applicable.
Conflicts of Interest
The authors declare no conflict of interest.
References
- Gross, J.L.; Insel, T.; Thomas, W. An r-Dimensional Quadratic Placement Algorithm. Manag. Sci. 1970, 17, 219–229. [Google Scholar]
- Koren, Y. On spectral graph drawing. In International Computing and Combinatorics Conference; Lecture Notes in Computer Science; Springer: Berlin, Germany, 2003; Volume 2697, pp. 496–508. [Google Scholar]
- Gross, J.L.; Tucker, T.W. Topological Graph Theory, Wiley-Interscience Series in Discrete Mathematics and Optimization; John Wiley & Sons, Inc.: New York, NY, USA, 1987. [Google Scholar]
- Holton, D.A.; Sheehan, J. The Petersen Graph, Australian Mathematical Society Lecture Series; Cambridge University Press: Cambridge, UK, 1993; Volume 7. [Google Scholar]
- Aleardi, L.C.; Devillers, O.; Fusy, E. Canonical ordering for graphs on the cylinder, with applications to periodic straight-line drawings on the flat cylinder and torus. J. Comput. Geom. 2018, 9, 391–429. [Google Scholar]
- Kocay, W.; Neilson, D.; Szypowski, R. Drawing graphs on the torus. Ars Combin. 2001, 59, 259–277. [Google Scholar]
- Kocay, W.; Neilson, D.; Szypowski, R. Embeddings of Small Graphs on the Torus. Cubo Mater. Educ. 2003, 5, 351–371. [Google Scholar]
- Friedberg, S.H.; Insel, A.J.; Spence, L.E. Linear Algebra; Prentice Hall, Inc.: Upper Saddle River, NJ, USA, 2018. [Google Scholar]
- Lawrencenko, S. Geometric realization of toroidal quadrangulations without hidden symmetries. Ceombinatorices 2014, 1, 11–20. [Google Scholar]
- Lawrencenko, S.; Shchikanov, A.Y. Euclidean realization of the product of cycles without hidden symmetries. Sib. Èlektron. Mater. Izv. 2015, 12, 777–783. (In Russian) [Google Scholar]
- Kang, M.-H. Toroidal fullerenes with the Cayley graph structures. Discrete Math. 2011, 311, 2384–2395. [Google Scholar] [CrossRef] [Green Version]
| Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2022 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).


{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}













