
Interval Type-3 Fuzzy Control for Automated Tuning of Image Quality in Televisions




Abstract
:1. Introduction
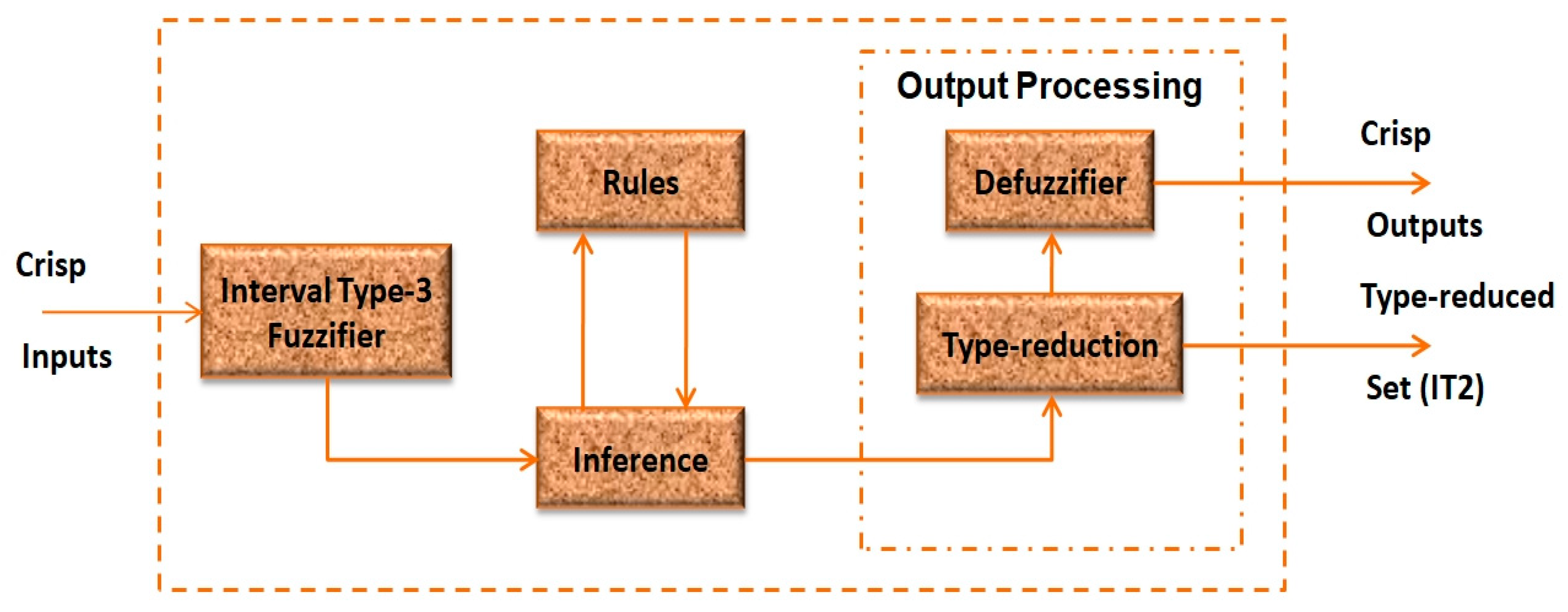
2. Interval Type-3 Fuzzy Theory
3. Mamdani Type-3 Fuzzy Models
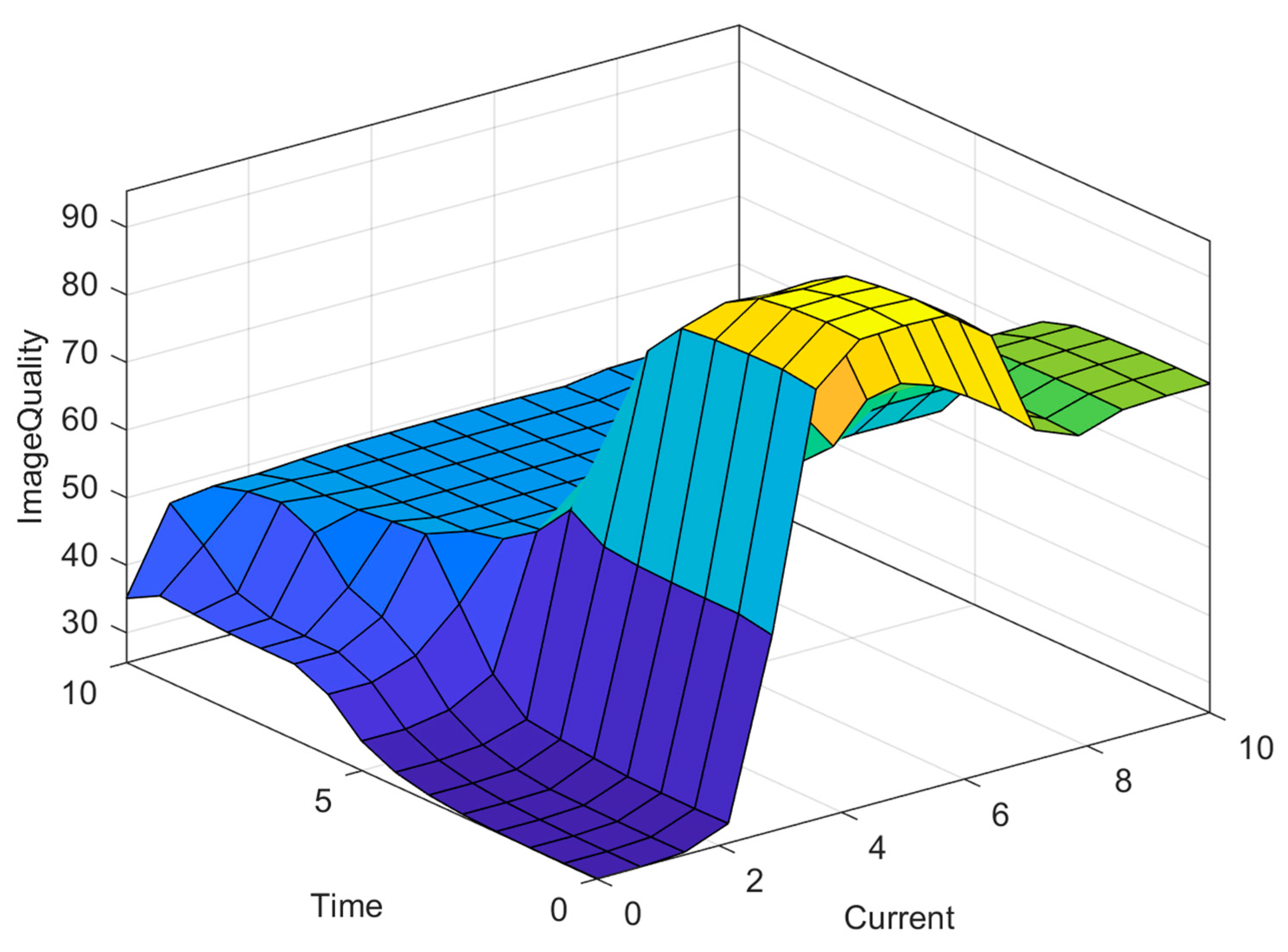
4. Simulation Results
5. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Acknowledgments
Conflicts of Interest
References
- Cao, Y.; Raise, A.; Mohammadzadeh, A.; Rathinasamy, S.; Band, S.S.; Mosavi, A. Deep learned recurrent type-3 fuzzy system: Application for renewable energy modeling/prediction. Energy Rep. 2021, 7, 8115–8127. [Google Scholar] [CrossRef]
- Turksen, I.B. From Type 1 to Full Type N Fuzzy System Models. J. Mult. Valued Log. Soft Comput. 2014, 22, 543–560. [Google Scholar]
- Qasem, S.N.; Ahmadian, A.; Mohammadzadeh, A.; Rathinasamy, S.; Pahlevanzadeh, B. A type-3 logic fuzzy system: Optimized by a correntropy based Kalman filter with adaptive fuzzy kernel size. Inform. Sci. 2021, 572, 424–443. [Google Scholar] [CrossRef]
- Rickard, J.T.; Aisbett, J.; Gibbon, G. Fuzzy Subsethood for Fuzzy Sets of Type-2 and Generalized Type-n. IEEE Trans. Fuzzy Syst. 2008, 17, 50–60. [Google Scholar] [CrossRef]
- Mohammadzadeh, A.; Sabzalian, M.H.; Zhang, W. An Interval Type-3 Fuzzy System and a New Online Fractional-Order Learning Algorithm: Theory and Practice. IEEE Trans. Fuzzy Syst. 2019, 28, 1940–1950. [Google Scholar] [CrossRef]
- Liu, Z.; Mohammadzadeh, A.; Turabieh, H.; Mafarja, M.; Band, S.S.; Mosavi, A. A New Online Learned Interval Type-3 Fuzzy Control System for Solar Energy Management Systems. IEEE Access 2021, 9, 10498–10508. [Google Scholar] [CrossRef]
- Zadeh, L.A. The Concept of a Linguistic Variable and its Application to Approximate Reasoning. Inf. Sci. 1975, 8, 43–80. [Google Scholar] [CrossRef]
- Zadeh, L.A. Knowledge representation in Fuzzy Logic. IEEE Trans. Knowl. Data Eng. 1989, 1, 89. [Google Scholar] [CrossRef]
- Zadeh, L.A. Fuzzy Logic. Computer 1998, 1, 83–93. [Google Scholar]
- Mendel, J.M. Uncertain Rule-Based Fuzzy Logic Systems: Introduction and New Directions; Prentice-Hall: Upper-Saddle River, NJ, USA, 2001. [Google Scholar]
- Mendel, J.M. Uncertain Rule-Based Fuzzy Logic Systems: Introduction and New Directions, 2nd ed.; Springer: Berlin/Heidelberg, Germany, 2017. [Google Scholar]
- Karnik, N.N.; Mendel, J.M. Operations on Type-2 Fuzzy Sets. Fuzzy Sets Syst. 2001, 122, 327–348. [Google Scholar] [CrossRef]
- Moreno, J.E.; Sanchez, M.A.; Mendoza, O.; Rodríguez-Díaz, A.; Castillo, O.; Melin, P.; Castro, J.R. Design of an interval Type-2 fuzzy model with justifiable uncertainty. Inf. Sci. 2020, 513, 206–221. [Google Scholar] [CrossRef]
- Mendel, J.M.; Hagras, H.; Tan, W.-W.; Melek, W.W.; Ying, H. Introduction to Type-2 Fuzzy Logic Control; Wiley and IEEE Press: Hoboken, NJ, USA, 2014. [Google Scholar]
- Olivas, F.; Valdez, F.; Castillo, O.; Melin, P. Dynamic parameter adaptation in particle swarm optimization using interval type-2 fuzzy logic. Soft Comput. 2016, 20, 1057–1070. [Google Scholar] [CrossRef]
- Sakalli, A.; Kumbasar, T.; Mendel, J.M. Towards Systematic Design of General Type-2 Fuzzy Logic Controllers: Analysis, Interpretation, and Tuning. IEEE Trans. Fuzzy Syst. 2021, 29, 226–239. [Google Scholar] [CrossRef]
- Ontiveros, E.; Melin, P.; Castillo, O. High order α-planes integration: A new approach to computational cost reduction of General Type-2 Fuzzy Systems. Eng. Appl. Artif. Intell. 2018, 74, 186–197. [Google Scholar] [CrossRef]
- Castillo, O.; Amador-Angulo, L. A generalized type-2 fuzzy logic approach for dynamic parameter adaptation in bee colony optimization applied to fuzzy controller design. Inf. Sci. 2018, 460-461, 476–496. [Google Scholar] [CrossRef]
- Precup, R.-E.; Preitl, S.; Petriu, E.; Bojan-Dragos, C.-A.; Szedlak-Stinean, A.-I.; Roman, R.-C.; Hedrea, E.-L. Model-based fuzzy control results for networked control systems. Rep. Mech. Eng. 2020, 1, 10–25. [Google Scholar] [CrossRef]
- Precup, R.-E.; Preitl, S.; Petriu, E.M.; Roman, R.-C.; Bojan-Dragos, C.-A.; Hedrea, E.-L.; Szedlak-Stinean, A.-I. A center manifold theory-based approach to the stability analysis of state feedback takagi-sugeno-kang fuzzy control systems. Facta Univ. Ser. Mech. Eng. 2020, 18, 189. [Google Scholar] [CrossRef]
- Vilela, M.; Oluyemi, G.; Andrei, P. A holistic approach to assessment of value of information (VOI) with fuzzy data and decision criteria. Decis. Mak. Appl. Manag. Eng. 2020, 3, 97–118. [Google Scholar] [CrossRef]
- Castillo, O. Towards Finding the Optimal n in Designing Type-n Fuzzy Systems for Particular Classes of Problems: A Review. Appl. Comput. Math. 2018, 17, 3–9. [Google Scholar]
- Castillo, O.; Melin, P. Soft Computing and Fractal Theory for Intelligent Manufacturing; Springer: Heidelberg, Germany, 2003. [Google Scholar] [CrossRef]
- Rickard, J.T.; Aisbett, J.; Gibbon, G.; Morgenthaler, D. Fuzzy subsethood for type-n fuzzy sets. In Proceedings of the NAFIPS 2008—2008 Annual Meeting of the North American Fuzzy Information Processing Society, New York, NY, USA, 19–22 May 2008; pp. 1–6. [Google Scholar]
- Singh, D.; Verma, N.K.; Ghosh, A.K.; Malagaudanavar, A.K. An Approach Towards the Design of Interval Type-3 T-S Fuzzy System. IEEE Trans. Fuzzy Syst. 2021. [Google Scholar] [CrossRef]
- Wang, J.-H.; Tavoosi, J.; Mohammadzadeh, A.; Mobayen, S.; Asad, J.H.; Assawinchaichote, W.; Vu, M.T.; Skruch, P. Non-Singleton Type-3 Fuzzy Approach for Flowmeter Fault Detection: Experimental Study in a Gas Industry. Sensors 2021, 21, 7419. [Google Scholar] [CrossRef] [PubMed]
- Alattas, K.A.; Mohammadzadeh, A.; Mobayen, S.; Aly, A.A.; Felemban, B.F.; Vu, M.T. A New Data-Driven Control System for MEMSs Gyroscopes: Dynamics Estimation by Type-3 Fuzzy Systems. Micromachines 2021, 12, 1390. [Google Scholar] [CrossRef] [PubMed]
- Tian, M.-W.; Mohammadzadeh, A.; Tavoosi, J.; Mobayen, S.; Asad, J.H.; Castillo, O.; Várkonyi-Kóczy, A.R. A Deep-learned Type-3 Fuzzy System and Its Application in Modeling Problems. Acta Polytech. Hung. 2022, 19, 151–172. [Google Scholar] [CrossRef]
- Ma, C.; Mohammadzadeh, A.; Turabieh, H.; Mafarja, M.; Band, S.S.; Mosavi, A. Optimal Type-3 Fuzzy System for Solving Singular Multi-Pantograph Equations. IEEE Access 2020, 8, 225692–225702. [Google Scholar] [CrossRef]
- Gheisarnejad, M.; Mohammadzadeh, A.; Farsizadeh, H.; Khooban, M.-H. Stabilization of 5G Telecom Converter-Based Deep Type-3 Fuzzy Machine Learning Control for Telecom Applications. IEEE Trans. Circuits Syst. II Express Briefs 2021, 69, 544–548. [Google Scholar] [CrossRef]
- Vafaie, R.H.; Mohammadzadeh, A.; Piran, J. A new type-3 fuzzy predictive controller for MEMS gyroscopes. Nonlinear Dyn. 2021, 106, 381–403. [Google Scholar] [CrossRef]
- Tian, M.-W.; Yan, S.-R.; Mohammadzadeh, A.; Tavoosi, J.; Mobayen, S.; Safdar, R.; Assawinchaichote, W.; Vu, M.T.; Zhilenkov, A. Stability of Interval Type-3 Fuzzy Controllers for Autonomous Vehicles. Mathematics 2021, 9, 2742. [Google Scholar] [CrossRef]
- Mohammadzadeh, A.; Castillo, O.; Band, S.S.; Mosavi, A. A Novel Fractional-Order Multiple-Model Type-3 Fuzzy Control for Nonlinear Systems with Unmodeled Dynamics. Int. J. Fuzzy Syst. 2021, 23, 1633–1651. [Google Scholar] [CrossRef]
- Gheisarnejad, M.; Mohammadzadeh, A.; Khooban, M. Model Predictive Control-Based Type-3 Fuzzy Estimator for Voltage Stabilization of DC Power Converters. IEEE Trans. Ind. Electron. 2021. [Google Scholar] [CrossRef]
- Taghieh, A.; Aly, A.A.; Felemban, B.F.; Althobaiti, A.; Mohammadzadeh, A.; Bartoszewicz, A. A Hybrid Predictive Type-3 Fuzzy Control for Time-Delay Multi-Agent Systems. Electronics 2021, 11, 63. [Google Scholar] [CrossRef]
- Yan, S.; Aly, A.A.; Felemban, B.F.; Gheisarnejad, M.; Tian, M.; Khooban, M.H.; Mohammadzadeh, A.; Mobayen, S. A New Event-Triggered Type-3 Fuzzy Control System for Multi-Agent Systems: Optimal Economic Efficient Approach for Actuator Activating. Electronics 2021, 10, 3122. [Google Scholar] [CrossRef]
- Nabipour, N.; Qasem, S.N.; Jermsittiparsert, K. Type-3 fuzzy voltage management in PV/Hydrogen fuel cell/battery hybrid systems. Int. J. Hydrogen Energy 2020, 45, 32478–32492. [Google Scholar] [CrossRef]
- Castillo, O.; Castro, J.R.; Melin, P. Interval Type-3 Fuzzy Systems: Theory and Design; Springer: Berlin/Heidelberg, Germany, 2022. [Google Scholar] [CrossRef]
- Naderipour, M.; Zarandi, M.H.F.; Bastani, S. A fuzzy cluster-validity index based on the topology structure and node attribute in complex networks. Expert Syst. Appl. 2021, 187, 115913. [Google Scholar] [CrossRef]
- Kalhori, M.R.N.; Zarandi, M.H.F. A new interval type-2 fuzzy reasoning method for classification systems based on normal forms of a possibility-based fuzzy measure. Inf. Sci. 2021, 581, 567–586. [Google Scholar] [CrossRef]














{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Number | IF | AND | AND | THEN |
|---|---|---|---|---|
| Voltage | Current Intensity | Time | Image Quality | |
| 1 | High | Adequate | Low | Very Good |
| 2 | Adequate | High | Low | Very Good |
| 3 | High | High | Low | Regular |
| 4 | Low | Adequate | Low | Regular |
| 5 | Adequate | Low | Low | Regular |
| 6 | Low | Low | Low | Bad |
| 7 | Adequate | Adequate | High | Very Good |
| 8 | High | Adequate | High | Good |
| 9 | Adequate | High | High | Good |
| 10 | Adequate | Adequate | High | Regular |
| 11 | Low | Adequate | High | Bad |
| 12 | Adequate | Adequate | Low | Excellent |
| Variable | Membership Function | σ | m |
|---|---|---|---|
| Input 1 | low | 1.30 | 0.00 |
| Input 1 | adequate | 1.10 | 5.00 |
| Input 1 | high | 1.30 | 10.00 |
| Input 2 | low | 1.30 | 0.00 |
| Input 2 | adequate | 1.10 | 5.00 |
| Input 2 | high | 1.30 | 10.00 |
| Input 3 | low | 2.50 | 0.00 |
| Input 3 | high | 2.60 | 10.00 |
| Output | bad | 7.00 | 0.00 |
| Output | regular | 7.00 | 25.00 |
| Output | good | 7.00 | 50.00 |
| Output | very good | 6.50 | 75.00 |
| Output | excellent | 4.10 | 100.00 |
| Voltage | Current | Time | Image Quality with T1 Fuzzy (%) | Image Quality with IT2 Fuzzy (%) | Image Quality with GT2 Fuzzy (%) | Image Quality with IT3 Fuzzy (%) | Expert Evaluation (%) |
|---|---|---|---|---|---|---|---|
| 9.03 | 7.47 | 2.53 | 37.2215 | 38.5492 | 39.1266 | 39.6137 | 40.50 |
| 5.01 | 5.02 | 3.10 | 84.3312 | 85.4573 | 86.8751 | 87.9177 | 88.25 |
| 4.91 | 5.10 | 5.10 | 50.7735 | 51.4486 | 51.9168 | 52.2079 | 53.00 |
| 8.75 | 4.95 | 5.03 | 55.4532 | 56.6396 | 57.2788 | 58.5392 | 57.75 |
| 5.20 | 4.85 | 8.70 | 48.1782 | 48.3319 | 48.8429 | 49.1119 | 50.75 |
| 2.25 | 6.33 | 7.20 | 24.9891 | 24.5638 | 24.0734 | 21.9642 | 23.25 |
| 5.10 | 4.99 | 5.20 | 48.7865 | 49.5543 | 50.7942 | 51.8969 | 51.50 |
| 6.20 | 3.17 | 5.15 | 48.6734 | 49.5112 | 50.7333 | 51.8500 | 52.25 |
| 5.31 | 5.21 | 4.80 | 53.1853 | 53.7693 | 54.2964 | 55.8204 | 56.50 |
| 3.99 | 6.25 | 5.10 | 49.0231 | 49.9732 | 51.2754 | 52.1439 | 53.25 |
| 5.00 | 5.00 | 0.20 | 89.9638 | 90.9367 | 91.7652 | 94.3397 | 95.50 |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2022 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Castillo, O.; Castro, J.R.; Melin, P. Interval Type-3 Fuzzy Control for Automated Tuning of Image Quality in Televisions. Axioms 2022, 11, 276. https://doi.org/10.3390/axioms11060276
Castillo O, Castro JR, Melin P. Interval Type-3 Fuzzy Control for Automated Tuning of Image Quality in Televisions. Axioms. 2022; 11(6):276. https://doi.org/10.3390/axioms11060276
Chicago/Turabian StyleCastillo, Oscar, Juan R. Castro, and Patricia Melin. 2022. "Interval Type-3 Fuzzy Control for Automated Tuning of Image Quality in Televisions" Axioms 11, no. 6: 276. https://doi.org/10.3390/axioms11060276
APA StyleCastillo, O., Castro, J. R., & Melin, P. (2022). Interval Type-3 Fuzzy Control for Automated Tuning of Image Quality in Televisions. Axioms, 11(6), 276. https://doi.org/10.3390/axioms11060276