


A Fractional Rheological Model of Viscoanelastic Media


Abstract
:1. Introduction
2. The Rheological Equation
3. Mechanical Representation of the Viscoanelastic Media According to the Ciancio–Kluitenberg Model
4. Fractional Rheological Model with Four Parameters of a Viscoanelastic Medium for a Single Relaxation Process
- , depends on the stress time constant , with:
- , depends on the stress relaxation time , with:
- , coincides with the complex module due to the impulsive stress applied at the initial instant.
- , depends on natural angular frequency
5. Fractional Rheological Model with Eight Parameters of a Viscoanelastic Medium for Two Single Relaxation Processes
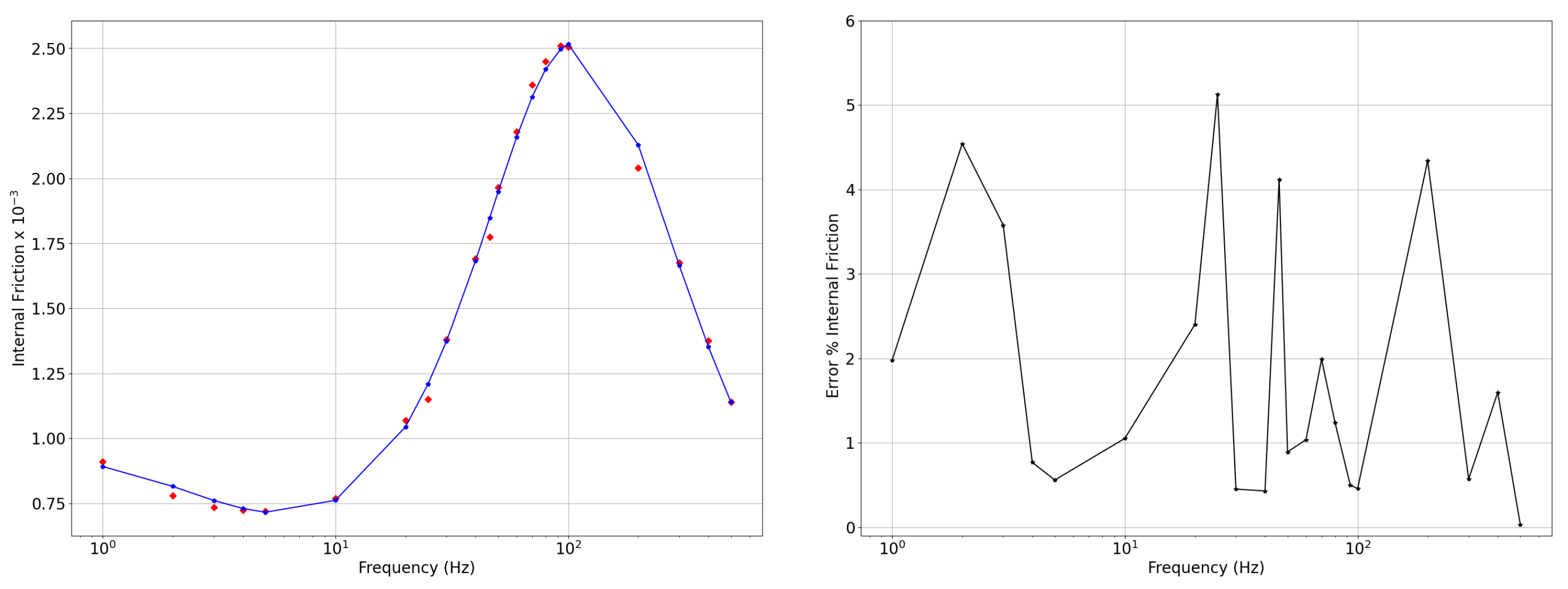
6. Numerical Results
7. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Conflicts of Interest
References
- Kluitenberg, G. On rheology and thermodynamics of irreversible processes. Physica 1962, 28, 1173–1183. [Google Scholar] [CrossRef]
- Kluitenberg, G. A note on the thermodynamics of Maxwell bodies, Kelvin bodies (Voigt bodies), and fluids. Physica 1962, 28, 561–568. [Google Scholar] [CrossRef]
- Kluitenberg, G. On the thermodynamics of viscosity and plasticity. Physica 1963, 29, 633–652. [Google Scholar] [CrossRef]
- Kluitenberg, G. On heat dissipation due to irreversible mechanical phenomena in continuous media. Physica 1967, 35, 177–192. [Google Scholar] [CrossRef]
- Kluitenberg, G. A thermodynamic derivation of the stress–strain relations for burgers media and related substances. Physica 1968, 38, 513–548. [Google Scholar] [CrossRef]
- Kluitenberg, G.; Ciancio, V. On linear dynamical equations of state for isotropic media I: General formalism. Phys. Stat. Mech. Appl. 1978, 93, 273–286. [Google Scholar] [CrossRef]
- Cianco, V.; Kluitenberg, G. On linear dynamical equations of state for isotropic media II. Phys. Stat. Mech. Appl. 1979, 99, 592–600. [Google Scholar] [CrossRef]
- Ciancio, V. Propagation and attenuation of singular wave surfaces in linear inelastic media. Phys. Stat. Mech. Appl. 1979, 97, 127–138. [Google Scholar] [CrossRef]
- Turrisi, E.; Ciancio, V.; Kluitenberg, G. On the propagation of linear transverse acoustic waves in isotropic media with mechanical relaxation phenomena due to viscosity and a tensorial internal variable II. Some cases of special interest (Poynting-Thomson, Jeffreys, Maxwell, Kelvin-Voigt, Hooke and Newton media). Phys. Stat. Mech. Appl. 1982, 116, 594–603. [Google Scholar] [CrossRef]
- Ciancio, V.; Bartolotta, A.; Farsaci, F. Experimental confirmations on a thermodynamical theory for viscoanelastic media with memory. Phys. Condens. Matter 2007, 394, 8–13. [Google Scholar] [CrossRef]
- Ciancio, A.; Ciancio, V.; Farsaci, F. Wave propagation in media obeying a thermoviscoanelastic model. UPB Sci. Bull. Ser. A 2007, 69, 69–79. [Google Scholar]
- Ciancio, V.; Ciancio, A.; Farsaci, F. On general properties of phenomenological and state coefficients for isotropic viscoanelastic media. Phys. Condens. Matter 2008, 403, 3221–3227. [Google Scholar] [CrossRef]
- Ciancio, A. An approximate evalutation of the phenomenological and state coefficients for viscoanelastic media with memory. U.P.B. Sci. Bull. 2011, 73, 3–14. [Google Scholar]
- Ciancio, V.; Restuccia, L. On heat equation in the framework of classic irreversible thermodynamics with internal variables. Int. J. Geom. Methods Mod. Phys. 2016, 13, 1640003. [Google Scholar] [CrossRef]
- Ciancio, V.; Palumbo, A. A thermodynamical theory with internal variables describing thermal effects in viscous fluids. J. -Non-Equilib. Thermodyn. 2018, 43, 171–184. [Google Scholar] [CrossRef]
- Ciancio, V. On the temperature equation in classical irreversible thermodinamics. Appl. Sci. 2022, 24, 71–86. [Google Scholar]
- Ciancio, V. On the Generalized Debye Equation for Media with Dielectric Relaxation Phenomena Described by Vectorial Internal Thermodynamic Variables. J. Non-Equilib. Thermodyn. 1989, 14, 239–250. [Google Scholar] [CrossRef]
- Ciancio, V.; Kluitenberg, G. On electromagnetic waves in isotropic media with dielectric relaxation. Acta Phys. Hung. 1989, 66, 251–276. [Google Scholar] [CrossRef]
- Ciancio, V.; Restuccia, L.; Kluitenberg, G. A Thermodynamic Derivation of Equations for Dielectric Relaxation Phenomena in Anisotropic Polarizable Media. J. Non.-Equil. Thermodyn. 1990, 15, 157–172. [Google Scholar] [CrossRef]
- Ciancio, V.; Farsaci, F.; Di Marco, G. A method for experimental evaluation of phenomenological coefficients in media with dielectric relaxation. Phys. Condens. Matter 2007, 387, 130–135. [Google Scholar] [CrossRef]
- Ciancio, V.; Verhás, J. A Thermodynamic Theory for Heat Radiation Through the Atmosphere. J. Non.-Equil. Thermodyn. 1991, 16, 57–66. [Google Scholar] [CrossRef]
- Zener, C. Internal friction in solids. Proc. Phys. Soc. 1940, 52, 152. [Google Scholar] [CrossRef]
- Caputo, M. Linear Models of Dissipation whose Q is almost Frequency Independent—II. Geophys. J. Int. 1967, 13, 529–539. [Google Scholar] [CrossRef]
- Caputo, M.; Mainardi, F. A new dissipation model based on memory mechanism. Pure Appl. Geophys. 1971, 91, 134–147. [Google Scholar] [CrossRef]
- Coleman, B.D.; Noll, W. The thermodynamics of elastic materials with heat conduction and viscosity. Arch. Ration. Mech. Anal. 1963, 13, 167–178. [Google Scholar] [CrossRef]
- Coleman, B.D.; Noll, W. Foundations of linear viscoelasticity. Rev. Mod. Phys. 1961, 33, 239. [Google Scholar] [CrossRef]
- Shen, L.J. Fractional derivative models for viscoelastic materials at finite deformations. Int. J. Solids Struct. 2020, 190, 226–237. [Google Scholar] [CrossRef]
- Fichera, G. Sul principio della memoria evanescente. Rend. Semin. Mat. Della Univ. Padova 1982, 68, 245–259. [Google Scholar]
- Mainardi, F.; Spada, G. Creep, relaxation and viscosity properties for basic fractional models in rheology. Eur. Phys. J. Spec. Top. 2011, 193, 133–160. [Google Scholar] [CrossRef] [Green Version]
- Ciancio, A.; Flora, B.F.F. A Fractional Complex Permittivity Model of Media with Dielectric Relaxation. Fractal Fract. 2017, 1, 4. [Google Scholar] [CrossRef] [Green Version]
- Ciancio, A.; Ciancio, V.; d’Onofrio, A.; Flora, B.F.F. A Fractional Model of Complex Permittivity of Conductor Media with Relaxation: Theory vs. Experiments. Fractal Fract. 2022, 6, 390. [Google Scholar] [CrossRef]
- Caputo, M.; Fabrizio, M. A new definition of fractional derivative without singular kernel. Prog. Fract. Differ. Appl. 2015, 1, 73–85. [Google Scholar]
- Tarasov, V.E.; Tarasova, S.S. Fractional derivatives and integrals: What are they needed for? Mathematics 2020, 8, 164. [Google Scholar] [CrossRef] [Green Version]
- Tarasov, V.E. No nonlocality. No fractional derivative. Commun. Nonlinear Sci. Numer. Simul. 2018, 62, 157–163. [Google Scholar] [CrossRef] [Green Version]
- Di Paola, M.; Pirrotta, A.; Valenza, A. Visco-elastic behavior through fractional calculus: An easier method for best fitting experimental results. Mech. Mater. 2011, 43, 799–806. [Google Scholar] [CrossRef] [Green Version]
- Ebaid, A.; El-Zahar, E.; Aljohani, A.; Salah, B.; Krid, M.; Machado, J.T. Analysis of the two-dimensional fractional projectile motion in view of the experimental data. Nonlinear Dyn. 2019, 97, 1711–1720. [Google Scholar] [CrossRef]
- Zener, C.M.; Siegel, S. Elasticity and Anelasticity of Metals. J. Phys. Chem. 1949, 53, 1468. [Google Scholar] [CrossRef]
- Bennewitz, K.; Rötger, H. Ueber die innere Reibung fester Körper; Absorptionsfrequenzen von Metallen im akustischen Gebiet. Physik. Zeitschr. 1936, 37, 578–588. [Google Scholar]
- Nowick, A.S. Internal friction in metals. Prog. Met. Phys. 1953, 4, 1–70. [Google Scholar] [CrossRef]
- Berry, B. Precise investigation of the theory of damping by transverse thermal currents. J. Appl. Phys. 1955, 26, 1221–1224. [Google Scholar] [CrossRef]
- Storn, R.; Price, K. Differential evolution—A simple and efficient heuristic for global optimization over continuous spaces. J. Glob. Optim. 1997, 11, 341–359. [Google Scholar] [CrossRef]
- Price, K.; Storn, R.M.; Lampinen, J.A. Differential Evolution: A Practical Approach to Global Optimization; Springer Science & Business Media: Berlin/Heidelberg, Germany, 2006. [Google Scholar]
- Johansson, R. Numerical Python: A Practical Techniques Approach for Industry; Apress: Berkeley, CA, USA, 2015. [Google Scholar]
- SciPy v1.9.3 Manual. Available online: https://docs.scipy.org/doc/scipy/reference/generated/scipy.optimize.differential_evolution.html (accessed on 10 December 2022).









{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| i | ||||
|---|---|---|---|---|
| 1 | 1 | 0.440 | 0.205 | 0.910 |
| 2 | 2 | 0.570 | 0.325 | 0.780 |
| 3 | 3 | 0.650 | 0.435 | 0.735 |
| 4 | 4 | 0.725 | 0.520 | 0.725 |
| 5 | 5 | 0.770 | 0.620 | 0.720 |
| 6 | 10 | 0.975 | 0.975 | 0.770 |
| 7 | 20 | 1.200 | 1.530 | 1.070 |
| 8 | 25 | 1.213 | 1.650 | 1.150 |
| 9 | 30 | 1.180 | 1.880 | 1.380 |
| 10 | 40 | 1.065 | 2.090 | 1.691 |
| 11 | 46 | 1.025 | 2.100 | 1.775 |
| 12 | 50 | 0.975 | 2.080 | 1.965 |
| 13 | 60 | 0.900 | 1.965 | 2.180 |
| 14 | 70 | 0.840 | 1.840 | 2.360 |
| 15 | 80 | 0.790 | 1.740 | 2.450 |
| 16 | 93 | 0.750 | 1.605 | 2.510 |
| 17 | 100 | 0.730 | 1.575 | 2.505 |
| 18 | 200 | 0.590 | 1.090 | 2.040 |
| 19 | 300 | 0.540 | 0.860 | 1.675 |
| 20 | 400 | 0.495 | 0.690 | 1.375 |
| 21 | 500 | 0.480 | 0.565 | 1.140 |
| i | ||||
|---|---|---|---|---|
| 1 | 0.575515 | 0.001006 | 0.022103 | 172.96 |
| 2 | 0.360071 | 0.000229 | 0.077811 | 0.57 |
| i | ||||
|---|---|---|---|---|
| 1 | 994.035785 | 45.242727 | 1.000000 | 0.120119 |
| 2 | 4366.812227 | 12.851653 | 1.000000 | 19.272905 |
| i | ||||
|---|---|---|---|---|
| 1 | 0.561151 | 0.001453 | 0.072381 | 64.97 |
| 2 | 0.158946 | 0.005930 | 0.077555 | 0.99 |
| i | ||||
|---|---|---|---|---|
| 1 | 688.231246 | 13.815780 | 1.000000 | 0.127644 |
| 2 | 168.634064 | 12.894075 | 1.000000 | 12.952460 |
| i | ||||
|---|---|---|---|---|
| 1 | 0.806110 | 0.003680 | 0.069378 | 73.54 |
| 2 | 0.206638 | 0.000088 | 0.017235 | 0.03 |
| i | ||||
|---|---|---|---|---|
| 1 | 271.739130 | 14.413791 | 1.000000 | 0.014111 |
| 2 | 11,363.636364 | 58.021468 | 1.000000 | 257.802147 |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2023 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Ciancio, A.; Ciancio, V.; Flora, B.F.F. A Fractional Rheological Model of Viscoanelastic Media. Axioms 2023, 12, 243. https://doi.org/10.3390/axioms12030243
Ciancio A, Ciancio V, Flora BFF. A Fractional Rheological Model of Viscoanelastic Media. Axioms. 2023; 12(3):243. https://doi.org/10.3390/axioms12030243
Chicago/Turabian StyleCiancio, Armando, Vincenzo Ciancio, and Bruno Felice Filippo Flora. 2023. "A Fractional Rheological Model of Viscoanelastic Media" Axioms 12, no. 3: 243. https://doi.org/10.3390/axioms12030243
APA StyleCiancio, A., Ciancio, V., & Flora, B. F. F. (2023). A Fractional Rheological Model of Viscoanelastic Media. Axioms, 12(3), 243. https://doi.org/10.3390/axioms12030243