

Dynamics of a Double-Impulsive Control Model of Integrated Pest Management Using Perturbation Methods and Floquet Theory




{kind=link}
{kind=link}
{kind=link}
{kind=link}
Abstract
:1. Introduction
2. Derivation of the Impulsive Control Model
3. Dynamics of the Impulsive Model
3.1. Boundedness of the Model Variables
3.2. Existence of the Pest-Free Periodic Orbit
3.3. Stability of the Pest-Free Periodic Solution
- (i)
- Application of biopesticide and chemical pesticide with same time interval , provided that
- (ii)
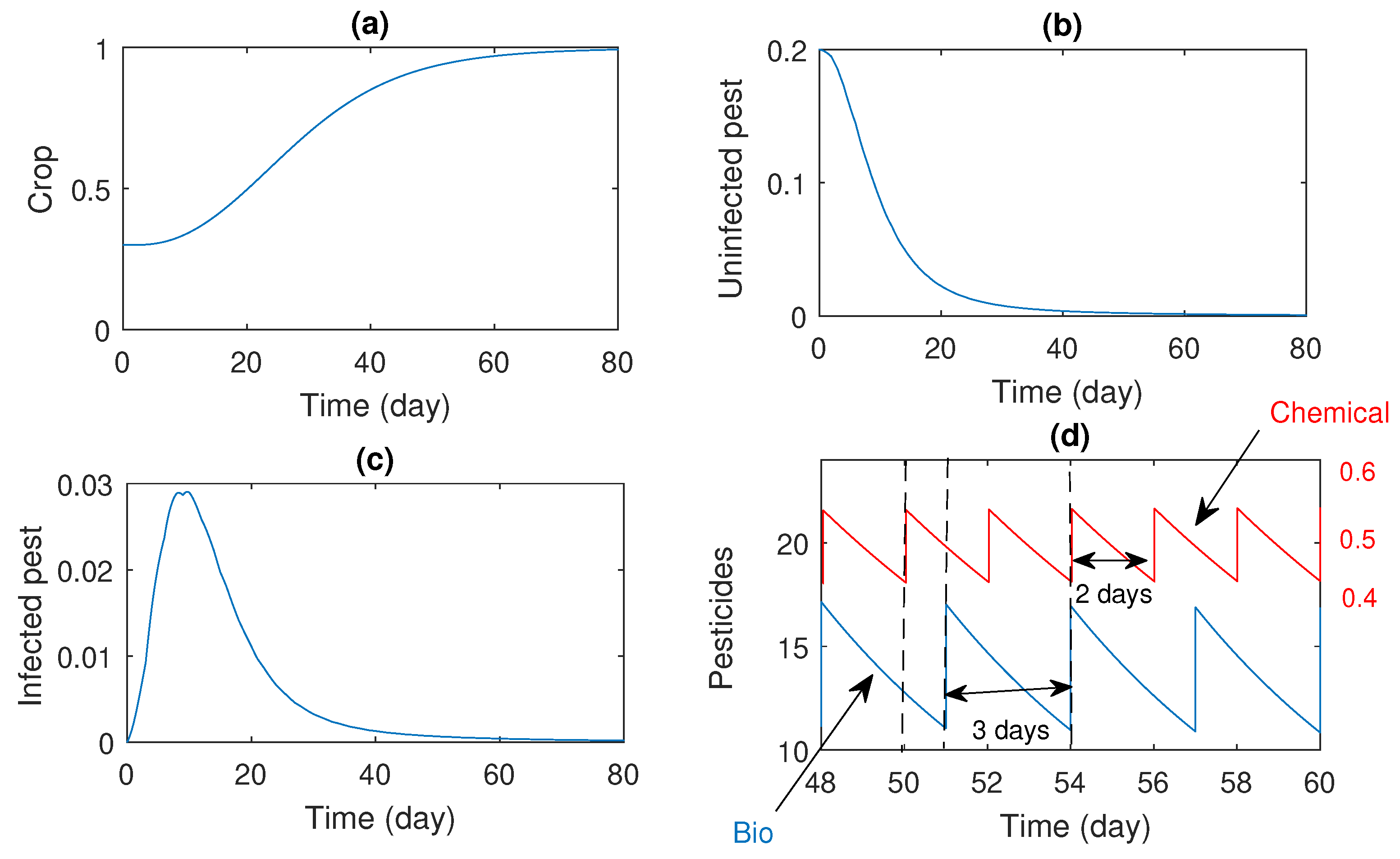
- Application of biopesticide with time interval and chemical pesticide with time interval , i.e., for different time intervals, where , provided that
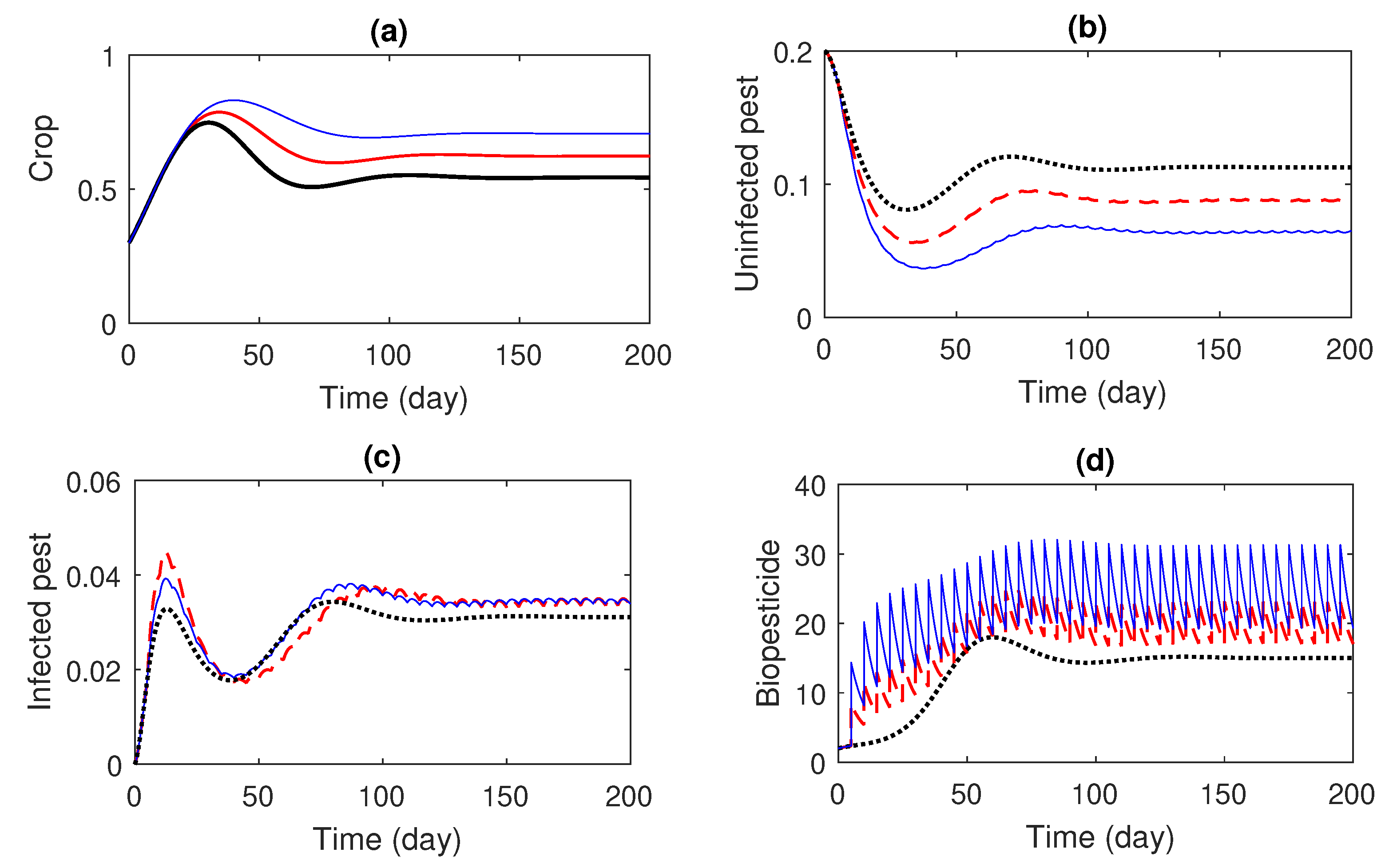
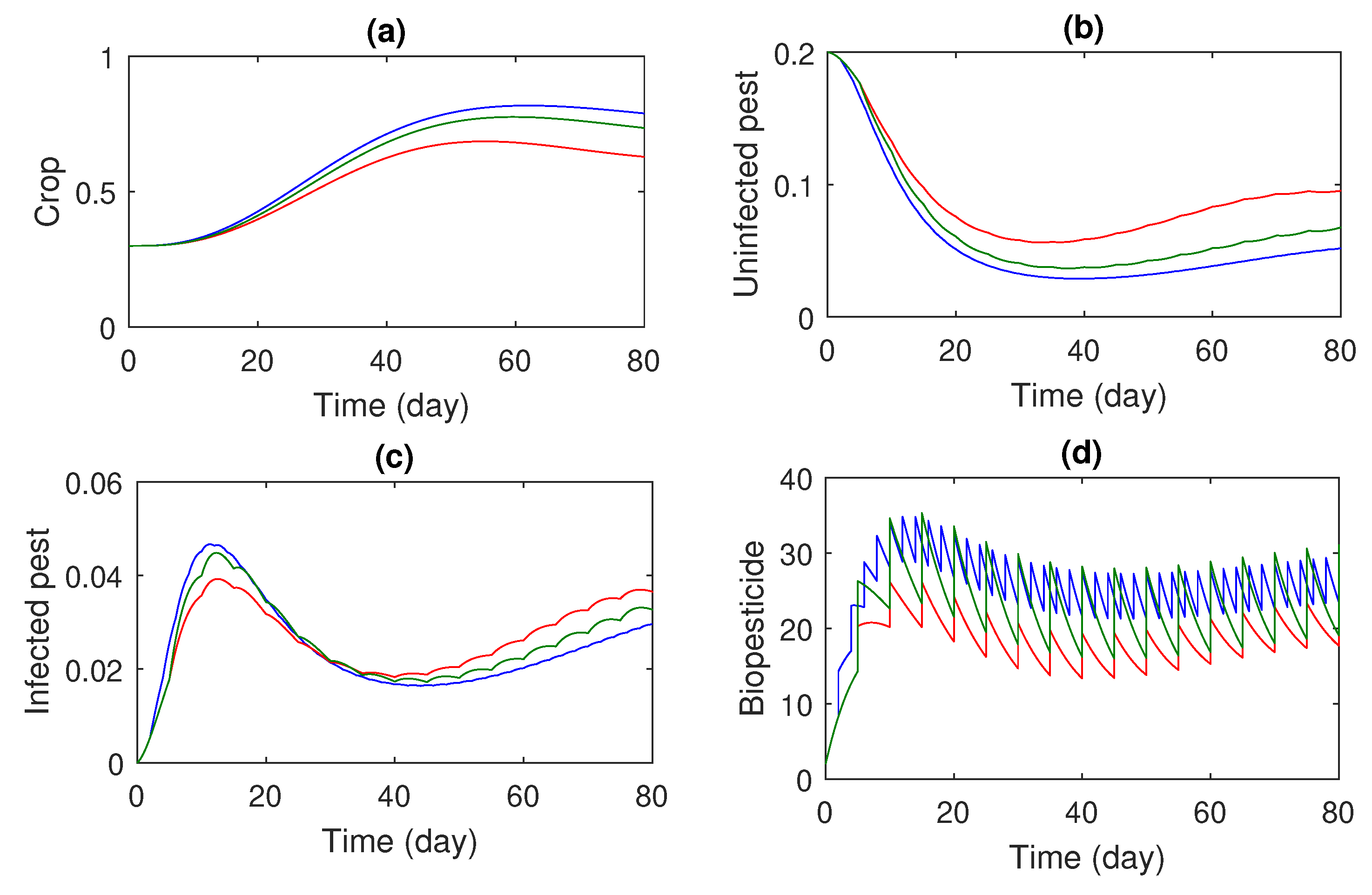
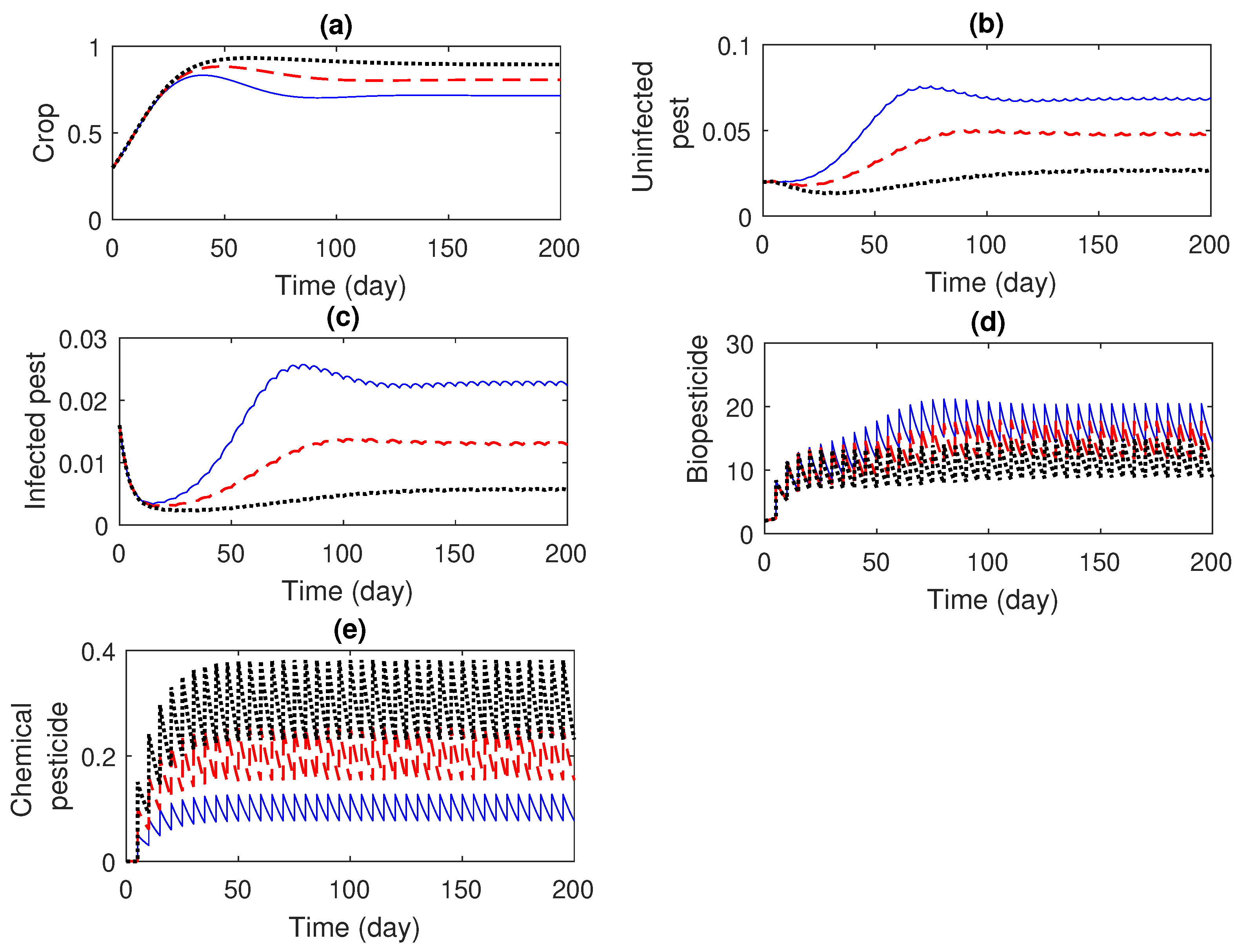
4. Numerical Simulations
5. Discussion and Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Acknowledgments
Conflicts of Interest
References
- Al Basir, F.; Banerjee, A.; Ray, S. Role of farming awareness in crop pest management—A mathematical model. J. Theor. Biol. 2019, 461, 59–67. [Google Scholar] [CrossRef]
- Ndolo, D.; Njuguna, E.; Adetunji, C.O.; Harbor, C.; Rowe, A.; Den Breeyen, A.; Sangeetha, J.; Singh, G.; Szewczyk, B.; Anjorin, T.S.; et al. Research and development of biopesticides: Challenges and prospects. Outlooks Pest Manag. 2019, 6, 267–276. [Google Scholar] [CrossRef]
- Chattopadhyay, P.; Banerjee, G.; Mukherjee, S. Recent trends of modern bacterial insecticides for pest control practice in integrated crop management system. 3 Biotech 2017, 7, 60. [Google Scholar] [CrossRef]
- Perring, T.M.; Gruenhagen, N.M.; Farrar, C.A. Management of plant viral diseases through chemical control of insect vectors. Annu. Rev. Entomol. 1999, 44, 457–481. [Google Scholar] [CrossRef] [PubMed]
- Ghosh, S.; Bhattacharya, D.K. Optimization in microbial pest control: An integrated approach. Appl. Math. Model. 2010, 34, 1382–1395. [Google Scholar] [CrossRef]
- Bhattacharyya, S.; Bhattacharya, D.K. Pest control through viral disease: Mathematical modeling and analysis. J. Theor. Biol. 2006, 238, 177–197. [Google Scholar] [CrossRef] [PubMed]
- Fest, C.; Schmidt, K. The Chemistry of Organophosphorus Pesticides; Springer: New York, NY, USA, 1973. [Google Scholar] [CrossRef]
- Lenteren, J.C.V. Integrated pest management in protected crops. In Integrated Pest Management; Dent, D., Ed.; Chapman and Hall: London, UK, 1995; pp. 311–320. Available online: https://cir.nii.ac.jp/crid/1573950400276916864 (accessed on 20 January 2023).
- Flint, M.L. Integrated Pest Management for Walnuts; University of California Statewide Integrated Pest Management Project; Division of Agriculture and Natural Resources, University of California: Davis, CA, USA, 1987; Volume 3270, p. 3641. [Google Scholar]
- Stern, V.M. The bioeconomics of pest control. Iowa State J. Res. 1975, 49, 467–472. Available online: https://core.ac.uk/download/pdf/224978255.pdf (accessed on 20 January 2023).
- Liu, B.; Teng, Z.; Chen, L. Analysis of a predator-prey model with Holling II functional response concerning impulsive control strategy. J. Comput. Appl. Math. 2006, 193, 347–362. [Google Scholar] [CrossRef]
- Páez Chávez, J.; Jungmann, D.; Siegmund, S. Modeling and analysis of integrated pest control strategies via impulsive differential equations. Int. J. Differ. Equ. 2017, 2017, 1820607. [Google Scholar] [CrossRef]
- Wang, L.; Chen, L.; Nieto, J.J. The dynamics of an epidemic model for pest control with impulsive effect. Nonlinear Anal. Real World Appl. 2010, 11, 1374–1386. [Google Scholar] [CrossRef]
- Al Basir, F.; Noor, M.H. A Model for Pest Control using Integrated Approach: Impact of latent and gestation Delays. Nonlinear Dyn. 2022, 108, 1805–1820. [Google Scholar] [CrossRef]
- Abraha, T.; Al Basir, F.; Obsu, L.L.; Torres, D.F.M. Pest control using farming awareness: Impact of time delays and optimal use of biopesticides. Chaos Solitons Fractals 2021, 146, 110869. [Google Scholar] [CrossRef]
- Chowdhury, J.; Basir, F.A.; Takeuchi, Y.; Ghosh, M.; Roy, P.K. A mathematical model for pest management in Jatropha curcas with integrated pesticides—An optimal control approach. Ecol. Complex. 2019, 37, 24–31. [Google Scholar] [CrossRef]
- Tang, S.; Chen, L. Modelling and analysis of integrated pest management strategy. Discret. Contin. Dyn. Syst. Ser. B 2004, 4, 759–768. [Google Scholar] [CrossRef]
- Paez Chavez, J.; Jungmann, D.; Siegmund, S. A comparative study of integrated pest management strategies based on impulsive control. J. Biol. Dyn. 2018, 12, 318–341. [Google Scholar] [CrossRef] [PubMed]
- Kalra, P.; Kaur, M. Stability analysis of an eco-epidemiological SIN model with impulsive control strategy for integrated pest management considering stage-structure in predator. Int. J. Math. Model. Numer. Optim. 2022, 12, 43–68. [Google Scholar] [CrossRef]
- Liu, J.; Hu, J.; Yuen, P. Extinction and permanence of the predator-prey system with general functional response and impulsive control. Appl. Math. Model. 2020, 88, 55–67. [Google Scholar] [CrossRef]
- Tian, B.; Li, J.; Wu, X.; Zhang, Y. Dynamic behaviour of a predator-prey system with impulsive control strategy. Int. J. Dyn. Syst. Differ. Equ. 2022, 12, 493–509. [Google Scholar] [CrossRef]
- Kumari, V.; Chauhan, S.; Dhar, J. Controlling pest by integrated pest management: A dynamical approach. Int. J. Math. Eng. Manag. Sci. 2020, 5, 769–786. [Google Scholar] [CrossRef]
- Pang, Y.; Wang, S.; Liu, S. Dynamics analysis of stage-structured wild and sterile mosquito interaction impulsive model. J. Biol. Dyn. 2022, 16, 464–479. [Google Scholar] [CrossRef]
- Chowdhury, J.; Al Basir, F.; Cao, X.; Roy, P.K. Integrated pest management for Jatropha Carcus plant: An impulsive control approach. Math. Methods Appl. Sci. 2021, in press. [CrossRef]
- Tian, Y.; Tang, S.; Cheke, R.A. Dynamic complexity of a predator-prey model for IPM with nonlinear impulsive control incorporating a regulatory factor for predator releases. Math. Model. Anal. 2019, 24, 134–154. [Google Scholar] [CrossRef]
- Jose, S.A.; Ramachandran, R.; Cao, J.; Alzabut, J.; Niezabitowski, M.; Balas, V.E. Stability analysis and comparative study on different eco-epidemiological models: Stage structure for prey and predator concerning impulsive control. Optim. Control. Appl. Methods 2022, 43, 842–866. [Google Scholar] [CrossRef]
- Li, J.; Huang, Q.D.; Liu, B. A pest control model with birth pulse and residual and delay effects of pesticides. Adv. Differ. Equ. 2019, 2019, 117. [Google Scholar] [CrossRef]
- Liu, B.; Kang, B.-L.; Tao, F.-M.; Hu, G. Modelling the effects of pest control with development of pesticide resistance. Acta Math. Appl. Sin. Engl. Ser. 2021, 37, 109–125. [Google Scholar] [CrossRef]
- Alzabut, J. An Integrated Eco-Epidemiological Plant Pest Natural Enemy Differential Equation Model with Various Impulsive Strategies. 2022. Available online: http://earsiv.ostimteknik.edu.tr:8081/xmlui/handle/123456789/207 (accessed on 20 January 2023).
- Zhang, H.; Xu, W.; Chen, L. A impulsive infective transmission SI model for pest control. Math. Methods Appl. Sci. 2007, 30, 1169–1184. [Google Scholar] [CrossRef]
- Al Basir, F.; Chowdhury, J.; Das, S.; Ray, S. Combined impact of predatory insects and bio-pesticide over pest population: Impulsive model-based study. Energy Ecol. Environ. 2022, 7, 173–185. [Google Scholar] [CrossRef]
- Shi, R.; Jiang, X.; Chen, L. A predator-prey model with disease in the prey and two impulses for integrated pest management. Appl. Math. Model. 2009, 33, 2248–2256. [Google Scholar] [CrossRef]
- Klausmeier, C.A. Floquet theory: A useful tool for understanding nonequilibrium dynamics. Theor. Ecol. 2008, 1, 153–161. [Google Scholar] [CrossRef]




Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2023 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Al Basir, F.; Chowdhury, J.; Torres, D.F.M. Dynamics of a Double-Impulsive Control Model of Integrated Pest Management Using Perturbation Methods and Floquet Theory. Axioms 2023, 12, 391. https://doi.org/10.3390/axioms12040391
Al Basir F, Chowdhury J, Torres DFM. Dynamics of a Double-Impulsive Control Model of Integrated Pest Management Using Perturbation Methods and Floquet Theory. Axioms. 2023; 12(4):391. https://doi.org/10.3390/axioms12040391
Chicago/Turabian StyleAl Basir, Fahad, Jahangir Chowdhury, and Delfim F. M. Torres. 2023. "Dynamics of a Double-Impulsive Control Model of Integrated Pest Management Using Perturbation Methods and Floquet Theory" Axioms 12, no. 4: 391. https://doi.org/10.3390/axioms12040391
APA StyleAl Basir, F., Chowdhury, J., & Torres, D. F. M. (2023). Dynamics of a Double-Impulsive Control Model of Integrated Pest Management Using Perturbation Methods and Floquet Theory. Axioms, 12(4), 391. https://doi.org/10.3390/axioms12040391