
Scalable and Fully Distributed Localization in Large-Scale Sensor Networks

Abstract
:1. Introduction
1.1. Challenges of Previous Approaches
1.2. Our Approach
2. Related Works
3. Optimal Flat Metric
3.1. Discrete Metric and Gaussian Curvature
3.2. Discrete Surface Ricci Flow
3.3. Optimal Flat Metric
4. Localization with Mere Connectivity
4.1. Computing Optimal Flat Metric with Mere Connectivity
4.2. Isometric Embedding
4.3. Time Complexity and Communication Cost
4.4. Discussions
5. Localization with Distance Measurement
5.1. Constructing Triangulation
5.2. Computing the Optimal Flat Metric with Distance Measurement
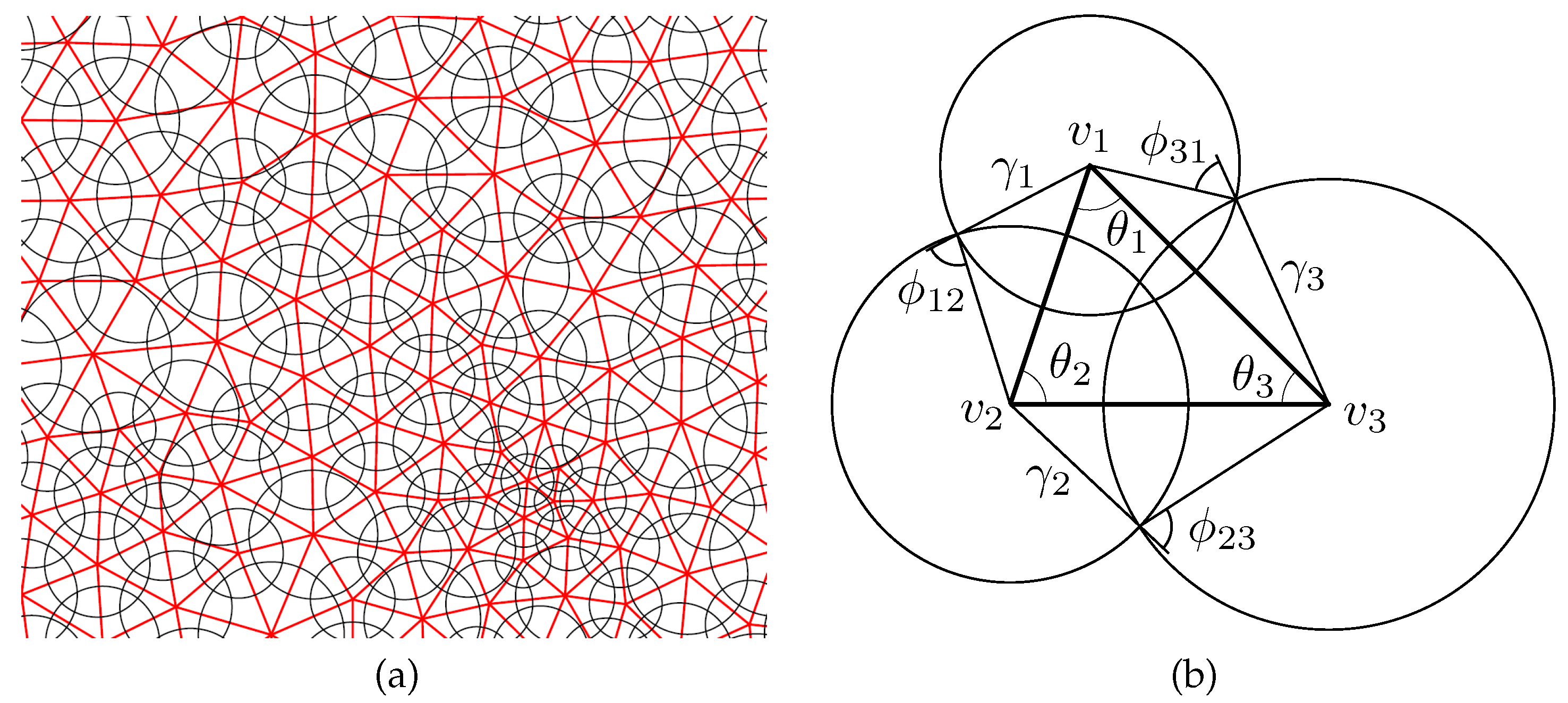
- For each corner attached to vertex in face , we compute a corner radius for with respect to :where represent the distance measurements of edges , respectively.
- For each , we compute its initial circle radius by averaging its attached corner radii computed from the previous step:where m is the number of the adjacent faces to (i.e., the vertex degree of ).
- For each edge , we compute its edge weight (the intersection angle of the two circles centered at and ) based on the Euclidean cosine law:
5.3. Time Complexity and Communication Cost
5.4. Error Propagation
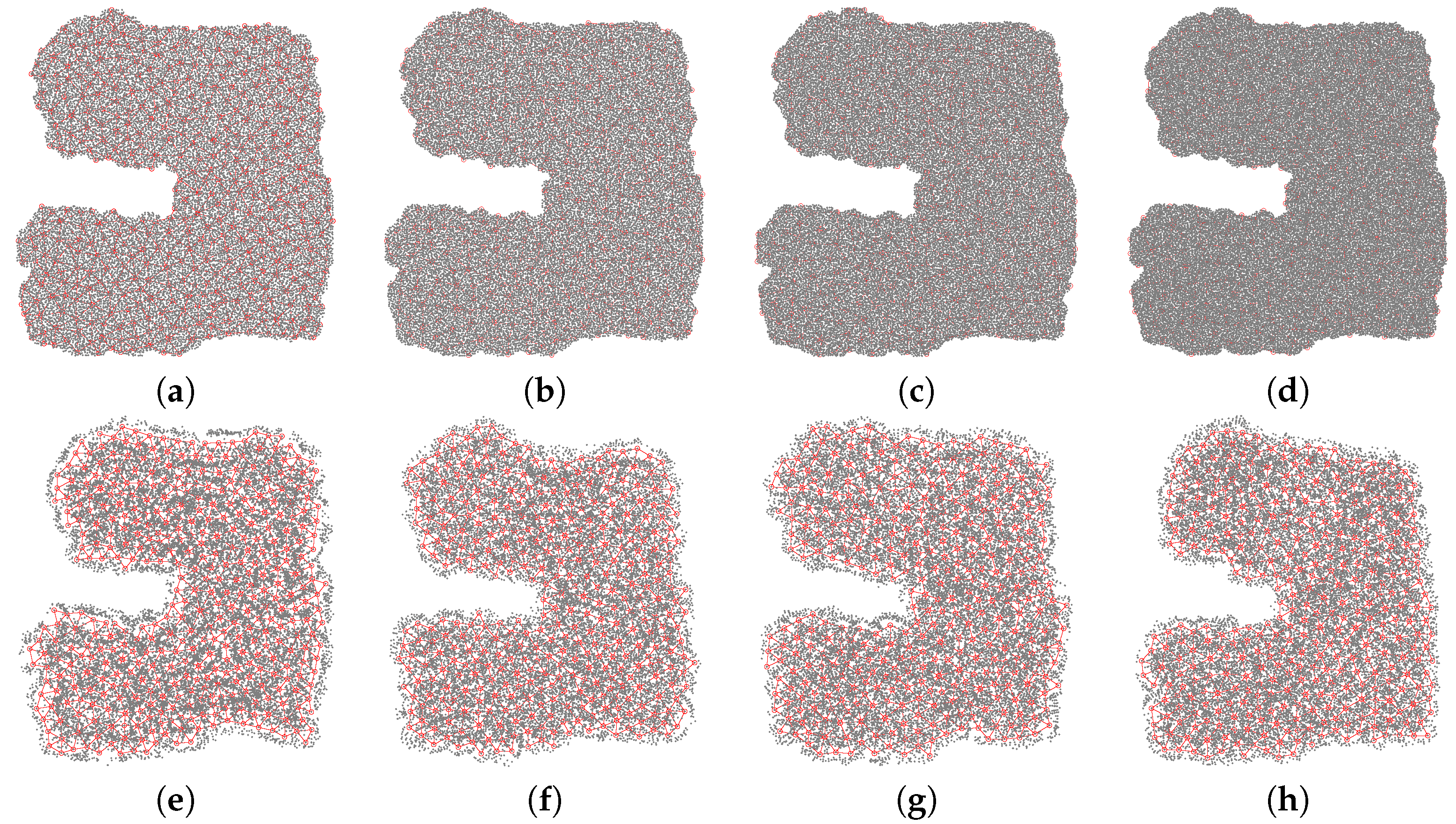
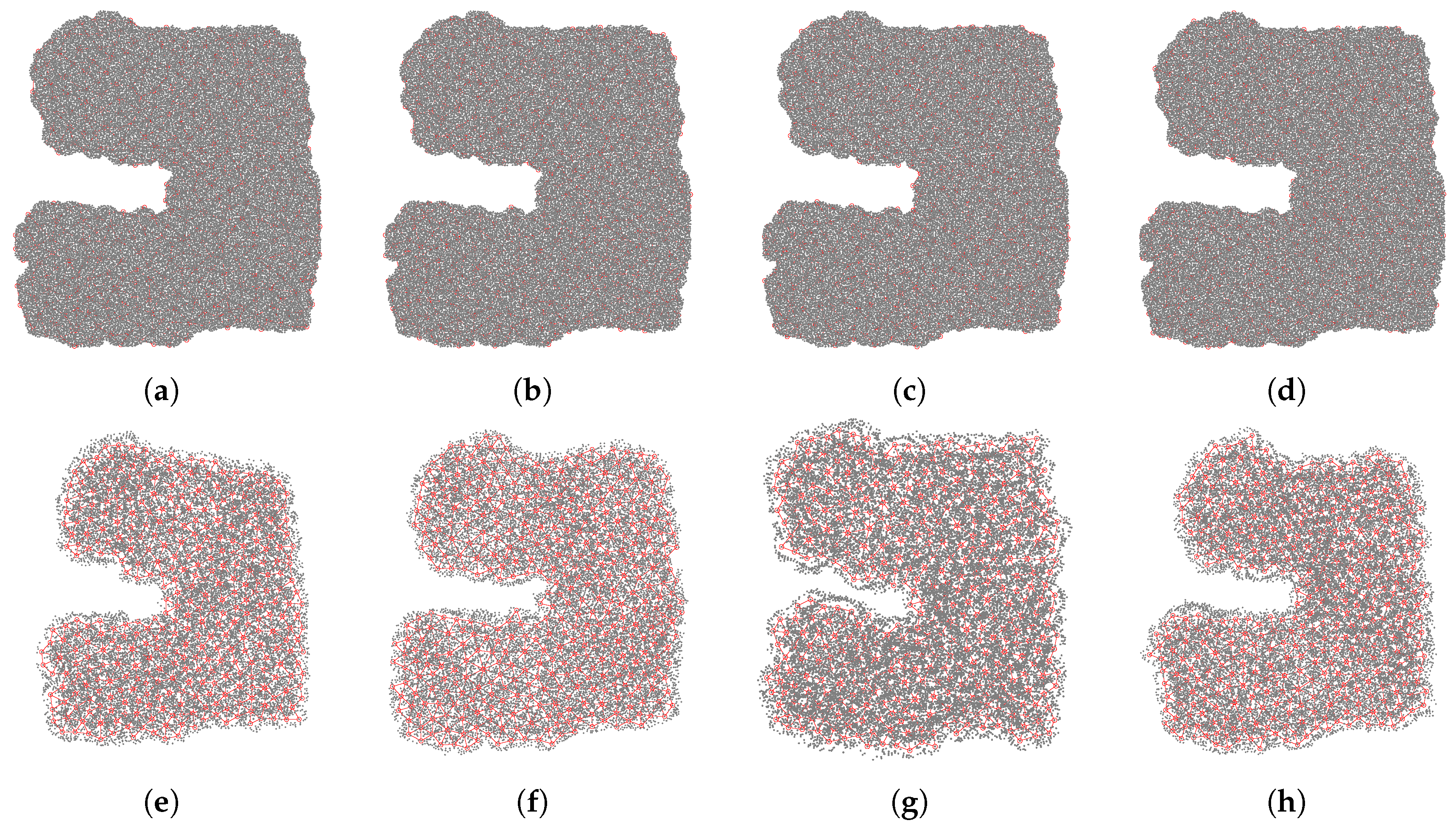
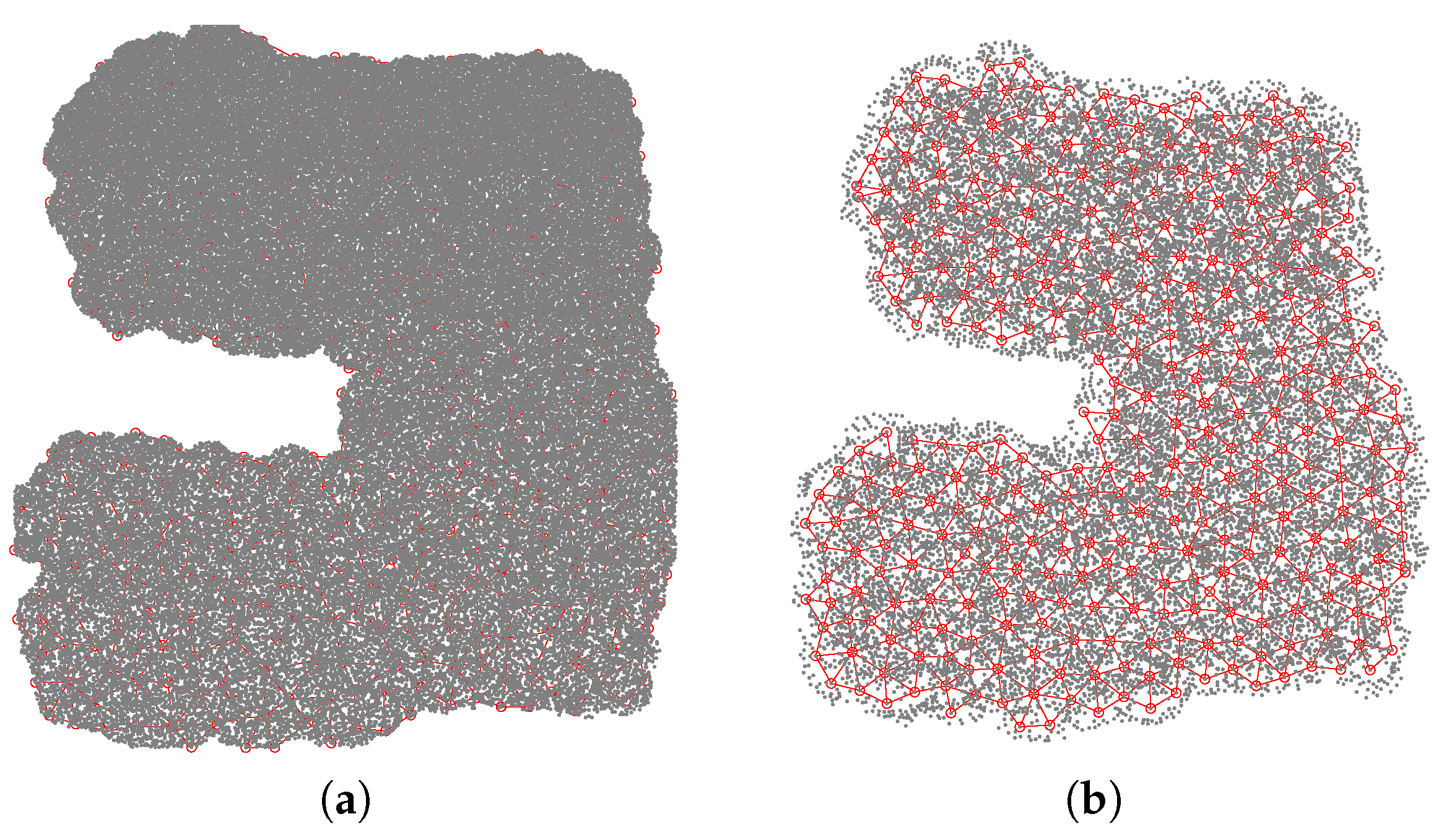
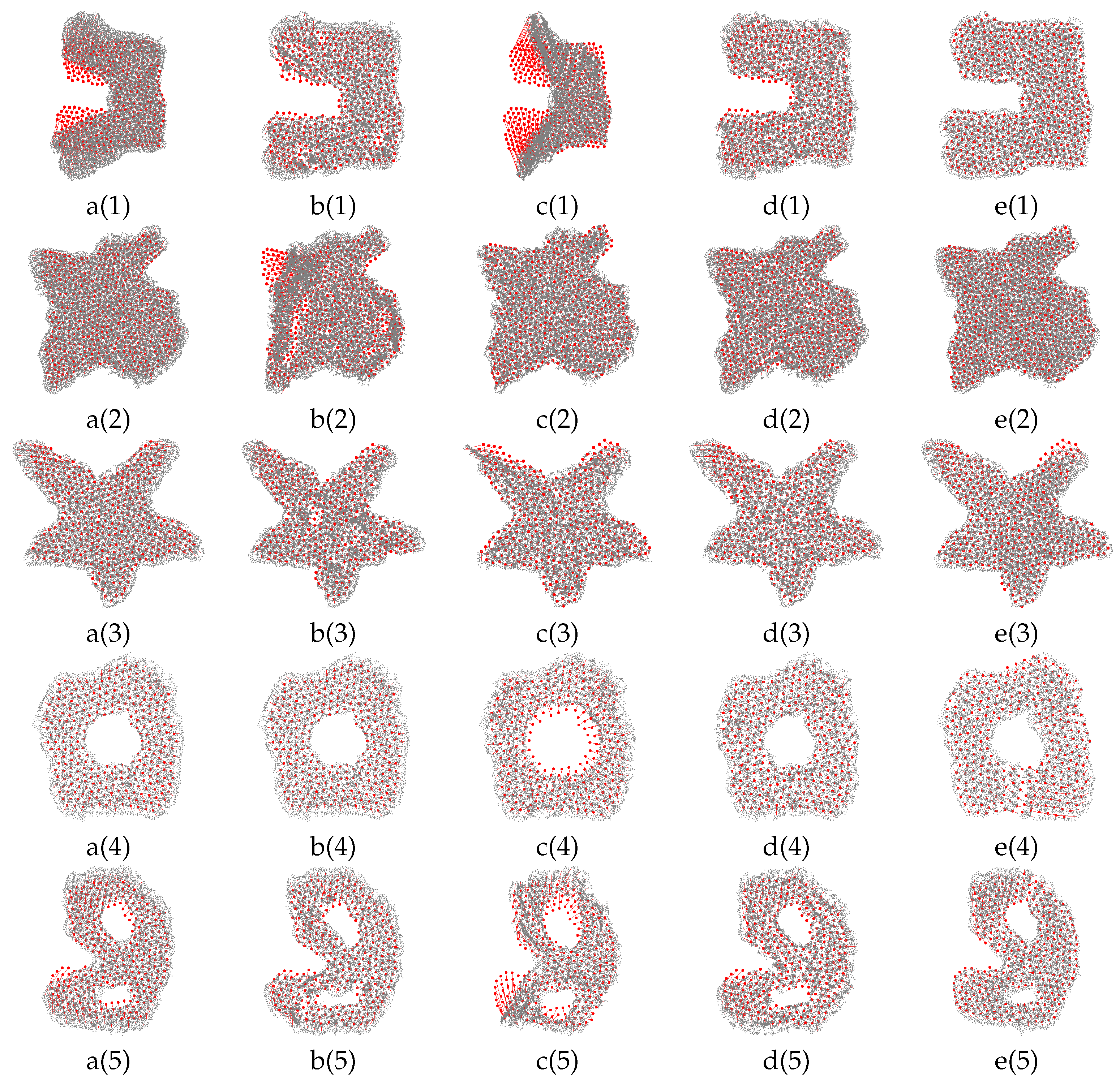
6. Simulations and Comparison
6.1. Networks with Variant Nodal Densities
6.2. Networks with Different Transmission Models
6.3. Networks with Non-Uniform Nodal Distribution
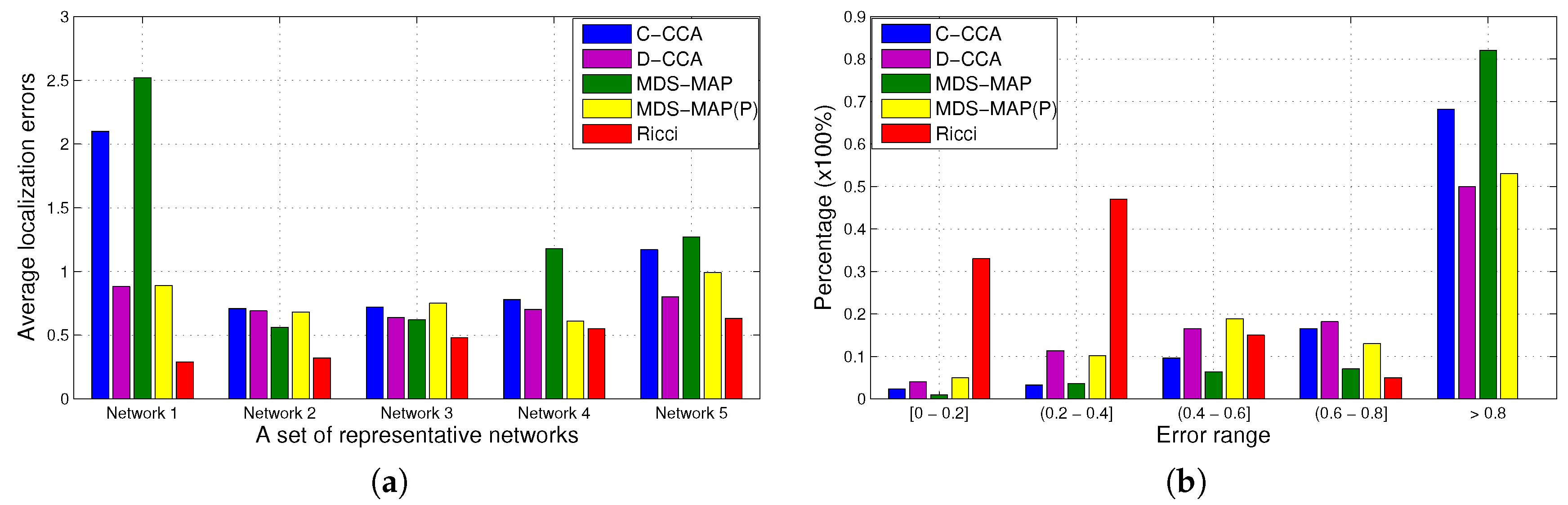
6.4. Comparison with Other Methods on Networks with Mere Connectivity
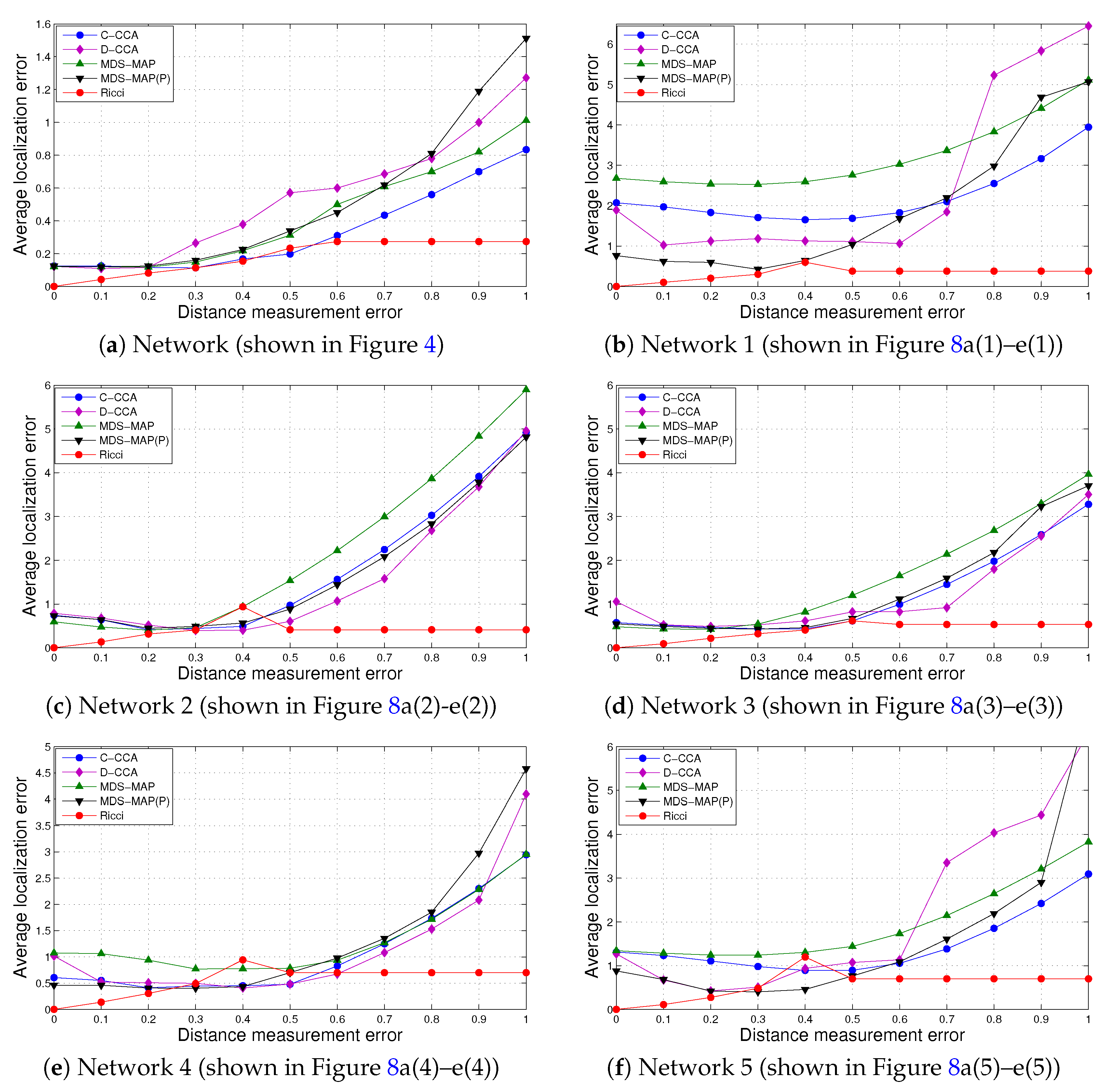
6.5. Comparison with Other Methods on Networks with Range Distance Measurements
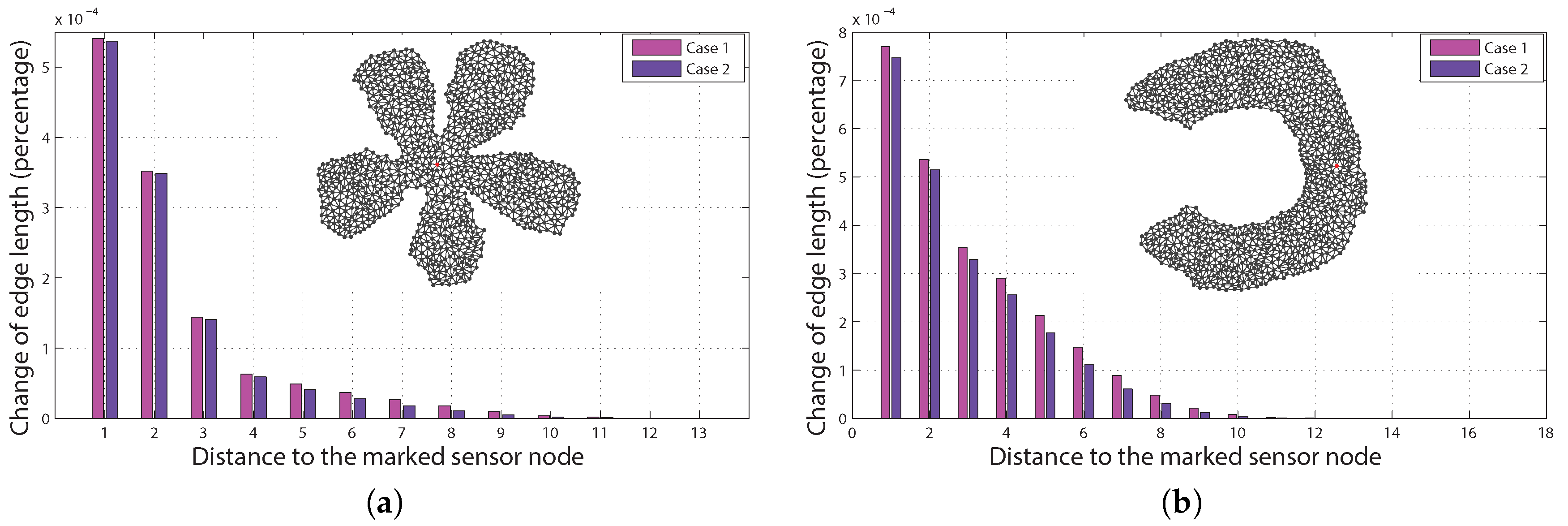
6.6. Error Propagation on Networks with One-Hop Communication Radio Range Distance Measurements
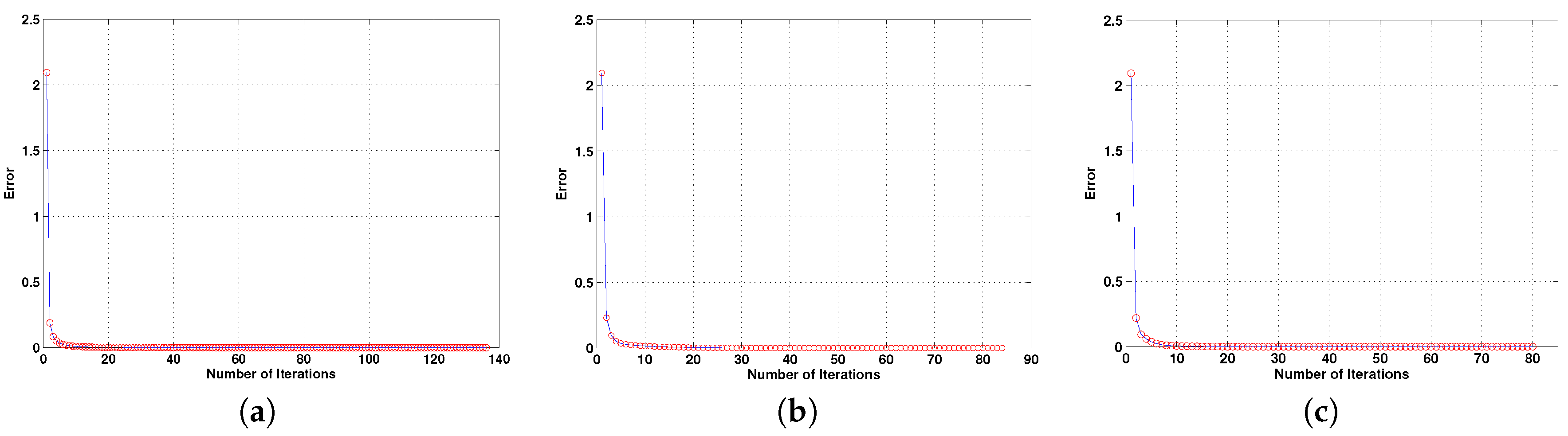
6.7. Computing Time
7. Conclusions
Acknowledgments
Author Contributions
Conflicts of Interest
References
- Shang, Y.; Ruml, W.; Zhang, Y.; Fromherz, M.P. Localization from Mere Connectivity. In Proceedings of the 4th ACM International Symposium on Mobile ad Hoc Networking and Computing, Annapolis, MD, USA, 1–3 June 2003; pp. 201–212. [Google Scholar]
- Shang, Y.; Ruml, W. Improved MDS-based Localization. In Proceedings of the Twenty-Third Annual Joint Conference of the IEEE Computer and Communications Societies, Hong Kong, China, 7–11 March 2004; pp. 2640–2651. [Google Scholar]
- Vivekanandan, V.; Wong, V.W. Ordinal MDS-based Localization for Wireless Sensor Networks. Int. J. Sens. Netw. 2006, 1, 169–178. [Google Scholar] [CrossRef]
- Giorgetti, G.; Gupta, S.; Manes, G. Wireless Localization Using Self-Organizing Maps. In Proceedings of the 6th ACM International Conference on Information Processing in Sensor Networks, Cambridge, MA, USA, 25–27 April 2007; pp. 293–302. [Google Scholar]
- Li, L.; Kunz, T. Localization Applying An Efficient Neural Network Mapping. In Proceedings of the 1st International Conference on Autonomic Computing and Communication Systems, Rome, Italy, 28–30 October 2007; pp. 1–9. [Google Scholar]
- Hamilton, R.S. Three Manifolds with Positive Ricci Curvature. J. Differ. Geom. 1982, 17, 255–306. [Google Scholar] [CrossRef]
- Lim, H.; Hou, J. Distributed Localization for Anisotropic Sensor Networks. ACM Trans. Sens. Netw. 2009, 5, 11–37. [Google Scholar] [CrossRef]
- Wu, H.; Wang, C.; Tzeng, N.F. Novel Self-Configurable Positioning Technique for Multi-hop Wireless Networks. IEEE/ACM Trans. Netw. 2005, 13, 609–621. [Google Scholar]
- Wang, Y.; Lederer, S.; Gao, J. Connectivity-based Sensor Network Localization with Incremental Delaunay Refinement Method. In Proceedings of the IEEE INFOCOM Conference, Rio de Janeiro, Brazil, 19–25 April 2009; pp. 2401–2409. [Google Scholar]
- Biswas, P.; Ye, Y. Semidefinite programming for ad hoc wireless sensor network localization. In Proceedings of the 3rd ACM International Symposium on Information Processing in Sensor Networks, Berkeley, CA, USA, 26–27 April 2004; pp. 46–54. [Google Scholar]
- So, A.M.C.; Ye, Y. Theory of semidefinite programming for sensor network localization. In Proceedings of the Sixteenth Annual ACM-SIAM Symposium on Discrete Algorithms, Society for Industrial and Applied Mathematics, Vancouver, BC, Canada, 23–25 January 2005; pp. 405–414. [Google Scholar]
- Kuhn, F.; Moscibroda, T.; Wattenhofer, R. Unit disk graph approximation. In Proceedings of the 2004 ACM Joint Workshop on Foundations of Mobile Computing, Philadelphia, PA, USA, 1 October 2004; pp. 17–23. [Google Scholar]
- Moscibroda, T.; O’Dell, R.; Wattenhofer, M.; Wattenhofer, R. Virtual coordinates for ad hoc and sensor networks. In Proceedings of the 2004 ACM Joint Workshop on Foundations of Mobile Computing, Philadelphia, PA, USA, 1 October 2004; pp. 8–16. [Google Scholar]
- Basu, A.; Gao, J.; Mitchell, J.S.; Sabhnani, G. Distributed localization using noisy distance and angle information. In Proceedings of the 7th ACM International Symposium on Mobile ad Hoc Networking and Computing, Florence, Italy, 22–25 May 2006; pp. 262–273. [Google Scholar]
- Costa, J.A.; Patwari, N.; Hero, A.O., III. Distributed weighted-multidimensional scaling for node localization in sensor networks. ACM Trans. Sens. Netw. 2006, 2, 39–64. [Google Scholar] [CrossRef]
- Hamilton, R.S. The Ricci flow on surfaces. Contemp. Math. 1988, 71, 237–261. [Google Scholar]
- Chow, B. The Ricci flow on the 2-sphere. J. Differ. Geom. 1991, 33, 325–334. [Google Scholar] [CrossRef]
- Chow, B.; Luo, F. Combinatorial Ricci Flows on Surfaces. J. Differ. Geom. 2003, 63, 97–129. [Google Scholar] [CrossRef]
- Thurston, W.P. Geometry and Topology of Three-Manifolds. Princet. Lect. Notes 1976, 17, 1877–1954. [Google Scholar]
- Weintraub, S.H. Differential Forms: A Complement to Vector Calculus; Academic Press: San Diego, CA, USA, 2007. [Google Scholar]
- Sarkar, R.; Yin, X.; Gao, J.; Luo, F.; Gu, X.D. Greedy Routing with Guaranteed Delivery Using Ricci Flows. In Proceedings of the IEEE International Conference on Information in Sensor Networks, San Francisco, CA, USA, 13–16 April 2009; pp. 121–132. [Google Scholar]
- Funke, S.; Milosavljevic, N. Guaranteed-Delivery Geographic Routing Under Uncertain Node Locations. In Proceedings of the 26th IEEE International Conference on Computer Communications, Anchorage, AK, USA, 6–12 May 2007; pp. 1244–1252. [Google Scholar]
- Funke, S.; Milosavljevic, N. How Much Geometry Hides in Connectivity–Part II. In Proceedings of the Eighteenth Annual ACM-SIAM Symposium on Discrete Algorithms, New Orleans, LA, USA, 7–9 January 2007; pp. 958–967. [Google Scholar]
- Zhao, Y.; Wu, H.; Jin, M.; Xia, S. Localization in 3D Surface Sensor Networks: Challenges and Solutions. In Proceedings of the 31st Annual IEEE International Conference on Computer Communications, Orlando, FL, USA, 25–30 March 2012; pp. 55–63. [Google Scholar]
- Zhou, H.; Wu, H.; Xia, S.; Jin, M.; Ding, N. A Distributed Triangulation Algorithm for Wireless Sensor Networks on 2D and 3D Surface. In Proceedings of the 30th IEEE International Conference on Computer Communications, Shanghai, China, 10–15 April 2011; pp. 1053–1061. [Google Scholar]
- Jin, M.; Kim, J.; Gu, X. Discrete Surface Ricci Flow: Theory and Applications. Math. Surf. 2007, 4647, 209–232. [Google Scholar]
- Henle, M. A Combinatorial Introduction to Topology; Dover Publications: New York, NY, USA, 1994. [Google Scholar]
- Bettstetter, C.; Hartmann, C. Connectivity of wireless multihop networks in a shadow fading environment. Wirel. Netw. 2005, 11, 571–579. [Google Scholar] [CrossRef]
- Jin, M.; Kim, J.; Luo, F.; Gu, X. Discrete Surface Ricci Flow. IEEE Trans. Vis. Comput. Graph. 2008, 14, 1030–1043. [Google Scholar] [CrossRef] [PubMed]













{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Symbol | Explanation |
|---|---|
| the longest boundary of M | |
| the i-th boundary of M | |
| b | the number of boundaries of M |
| E | edges of M |
| an edge belonging to E with two ending vertices and | |
| the number of edges of M | |
| F | triangle faces of M |
| a triangle face belonging to F with vertices , , and | |
| the number of triangle faces of M | |
| the discrete Gaussian curvature of | |
| the target Gaussian curvature of | |
| a shortest path between the initiator of and | |
| the length of | |
| M | a triangulated surface (or mesh in short) embedded in |
| the boundary of M | |
| a ratio between the longest and shortest edge lengths of | |
| t | the time |
| the logarithm of of | |
| V | vertices of M |
| the number of vertices of M | |
| a vertex belonging to V with id i | |
| the corner angle attached to vertex in face | |
| the radius of a circle associated with | |
| the radius function assigned at M | |
| weight of (the intersection angle of two circles centered at and ) | |
| the weight function assigned at M | |
| circle packing metric of M | |
| the Euler characteristic number of M | |
| the step length computing optimal flat metric | |
| the threshold of curvature error computing optimal flat metric |
© 2017 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Jin, M.; Xia, S.; Wu, H.; Gu, X.D. Scalable and Fully Distributed Localization in Large-Scale Sensor Networks. Axioms 2017, 6, 15. https://doi.org/10.3390/axioms6020015
Jin M, Xia S, Wu H, Gu XD. Scalable and Fully Distributed Localization in Large-Scale Sensor Networks. Axioms. 2017; 6(2):15. https://doi.org/10.3390/axioms6020015
Chicago/Turabian StyleJin, Miao, Su Xia, Hongyi Wu, and Xianfeng David Gu. 2017. "Scalable and Fully Distributed Localization in Large-Scale Sensor Networks" Axioms 6, no. 2: 15. https://doi.org/10.3390/axioms6020015
APA StyleJin, M., Xia, S., Wu, H., & Gu, X. D. (2017). Scalable and Fully Distributed Localization in Large-Scale Sensor Networks. Axioms, 6(2), 15. https://doi.org/10.3390/axioms6020015