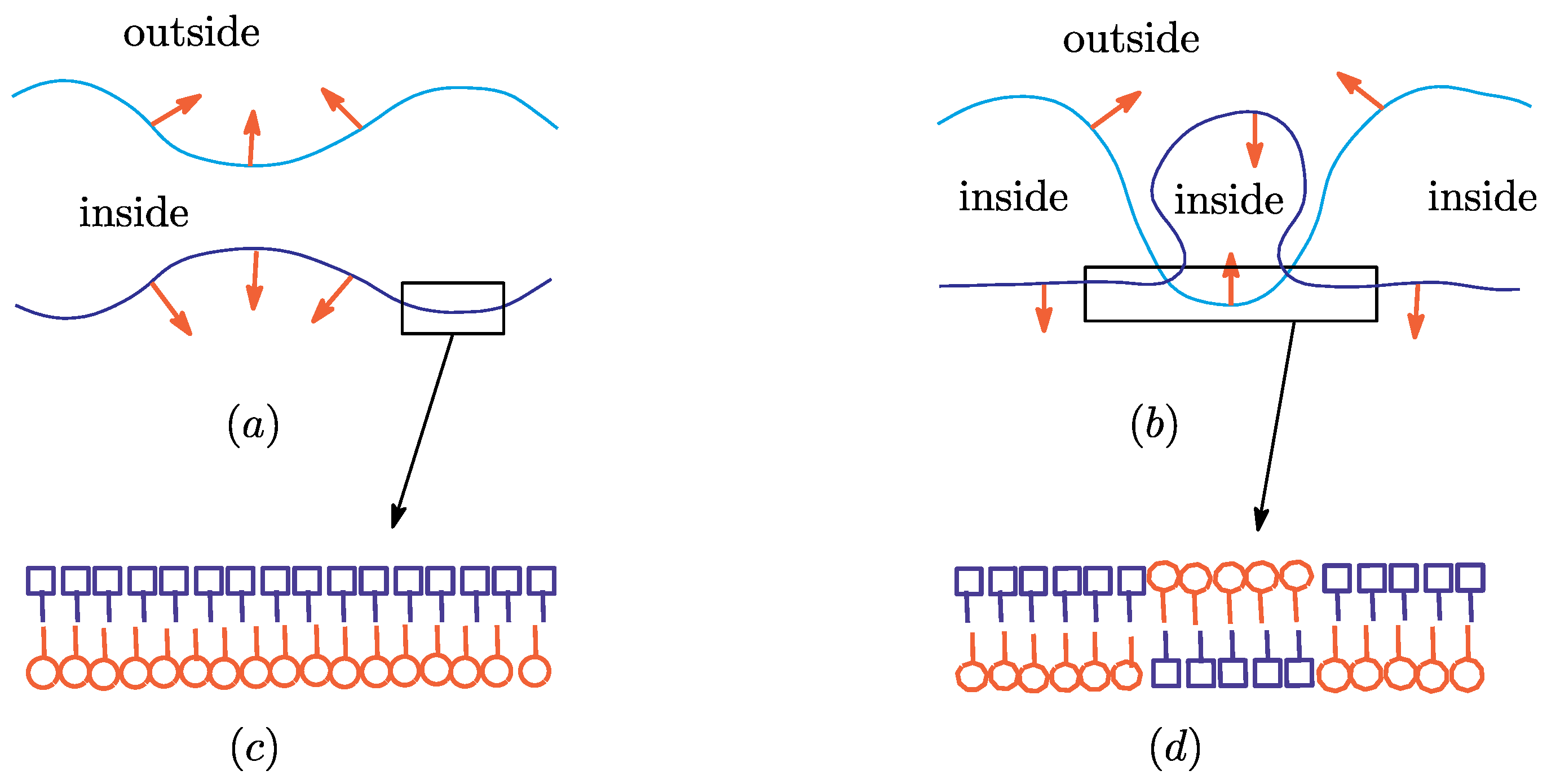
3.1. Membrane Orientation
First, we should comment on the surface orientation. The unit normal vector
is directed from inside to outside of the material separated from bulk material by the membrane (see
Figure 1a). However, if the membrane self-intersects, then the direction of
changes from outside to inside (
Figure 1b). Otherwise (⇔
is directed from inside to outside),
discontinuously changes at the intersection point. For this reason, we change the surface orientation by changing the local coordinate system from left-handed to right-handed while
remains unchanged (
Figure 1b). We should emphasize that our basic assumption is that the surface orientation is locally changeable. This means that the surface in
is self-intersecting, or in other words, the surface is not self-avoiding.
However, such an intersection process is not so easy to implement in the numerical simulations (no numerical simulation is performed in this paper). Apart from this, it is unclear whether or not the implementation of such an intersection process is effective for simulating the membrane inversion. Therefore, we assume that the surface is locally invertible without intersections; an inversion is expected to occur independent of whether the surface is self-intersecting or not. Indeed, real physical membranes are composed of lipid molecules, which have hydrophobic and hydrophilic parts. These lipids form a bilayer structure (
Figure 1c). In those real membranes, the bilayer structure is partly inverted just as in
Figure 1d via the so-called flip-flop process. Such an inversion process without intersection is not always unphysical because it can be seen in the process of pore formation. The pore formation process is reversible and forms cup-like membranes, where the membranes are not always self-intersecting [
33]. The cup-like membranes are stable [
34] and expected to play an important role as an intermediate configuration for cell inversion. It should be remarked that the surface orientation is also changeable in the process of cell fission and fusion, where the surface self-intersects, in real physical membranes.
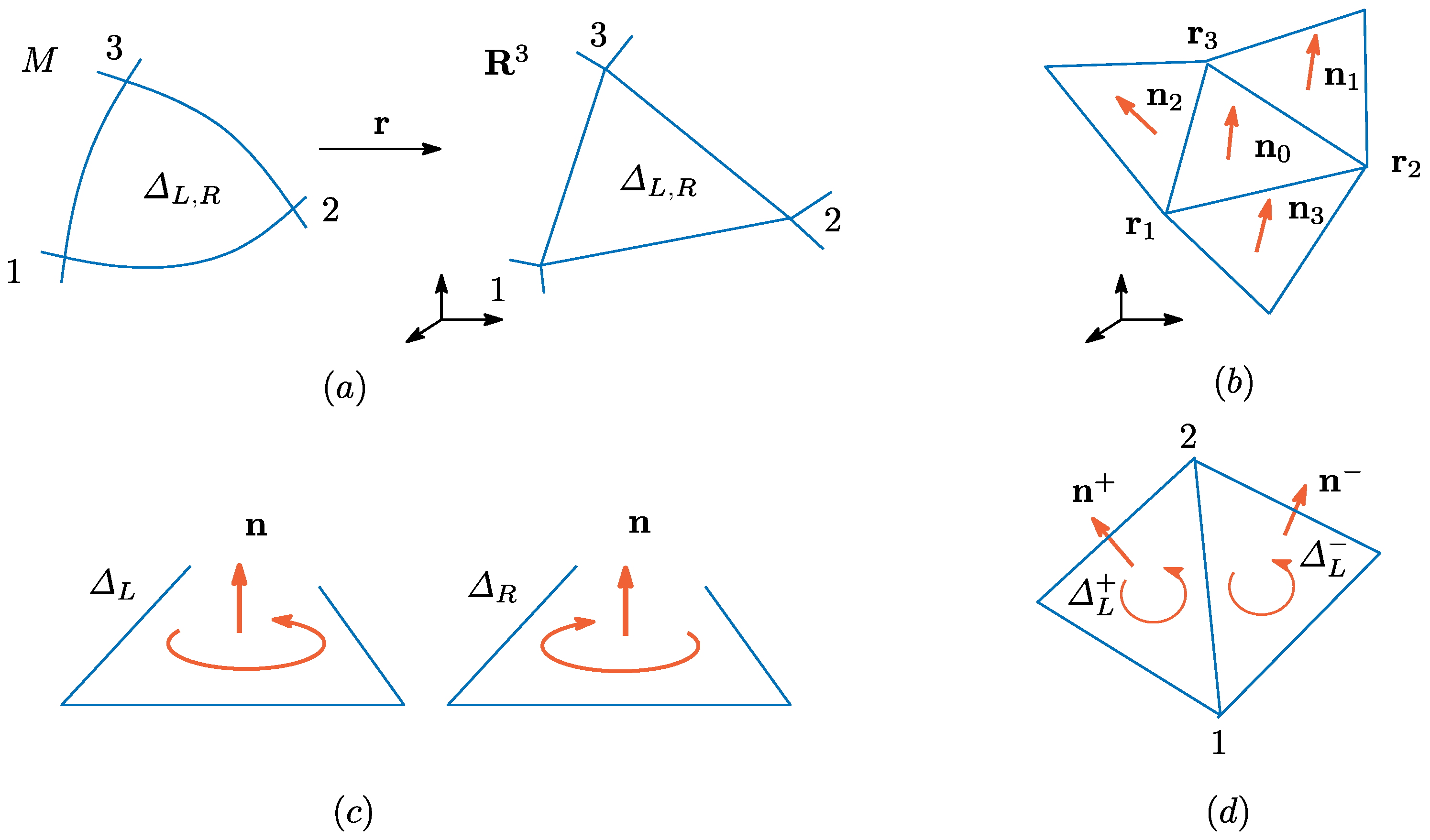
To define a discrete model, we use a piecewise-linearly triangulated surface in
[
3,
4,
5]. In this paper, a spherical surface is assumed. Therefore, it is natural to assume that
M is also triangulated and of sphere topology. Triangles in
M can be smooth in general, and these smooth triangles are mapped to piecewise-linear triangles in
by
(see
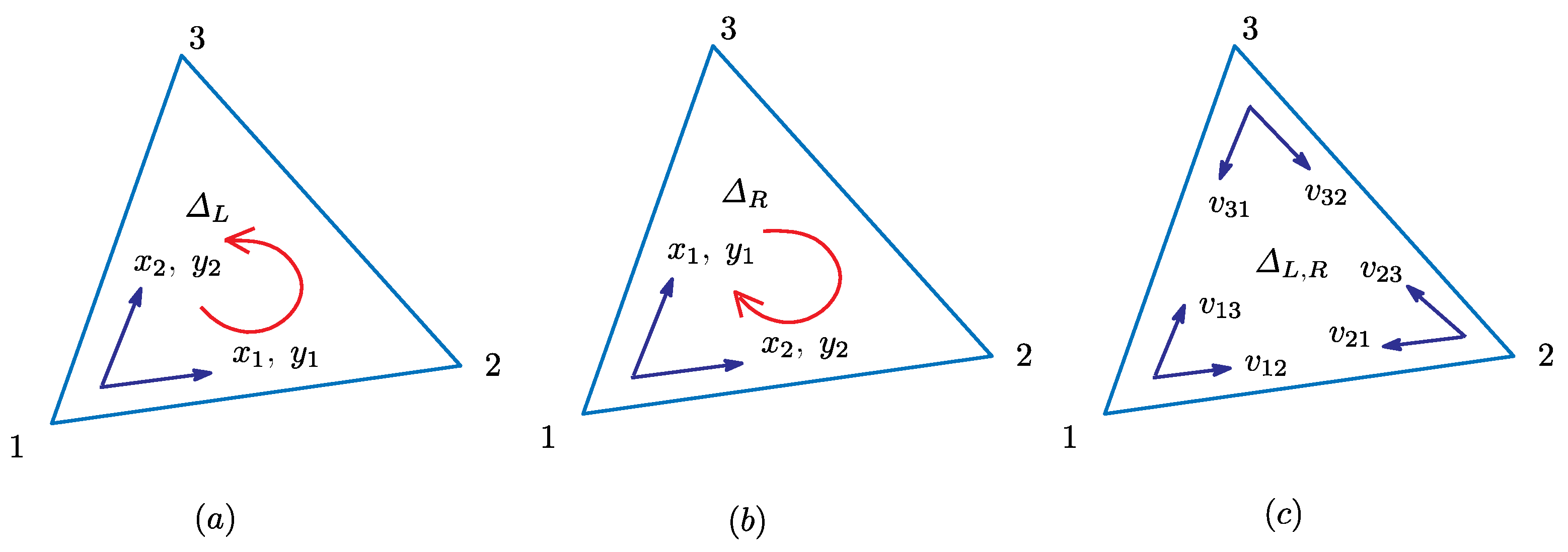
Figure 2a,b). We should note that triangle
in
M has two different orientations. Let
denote the triangle that has the left-hand (right-hand) orientation, where
corresponds to the left-handed (right-handed) local coordinate system. The symbol
is used for non-inverted parts of the surface, while
is used for inverted parts shown in
Figure 1d. The direction of
is defined to be dependent on the orientation of
, as mentioned in the previous subsection (see
Figure 2c).
The surface inversion is given by:
for example. The problem is whether the inverted surface is stable or not. As we will see below, the energy of the inverted surface is different from that of the original surface in a non-Euclidean metric model. This non-Euclidean metric model becomes well-defined if it is treated as an FG model. In the FG modeling (not in the standard HP modeling), we assume that the surface is locally invertible as in
Figure 1d, which can be defined by the change of local coordinate orientation. Thus, studies on the stability of inverted surfaces become feasible within the scope of FG modeling, although the transformation of variables
for this local inversion is not always given by Equation (
2); the vertex position remains unchanged under the change of triangle orientation.
3.2. Discretization of the Model
In this subsection, the discretization of the Hamiltonian in Equation (
1) is performed on the triangles
and their image triangles
. The function
in
is defined on each triangle
in
M in the discrete model, and we denote the function
on
by
. Thus, the discrete metric defined on triangle
is given by:
By replacing the integral and partial derivatives in
and
with the sum over triangles
and differences, respectively, such that:
we have the discrete expressions
and
corresponding to the discrete energies
and
of
and
on triangle
, where the local coordinate origin is assumed at Vertex 1 (see
Figure 2b). Thus, the corresponding discrete expressions of
and
are given by:
where
. The index
i of
in this
represents a triangle (see
Figure 2b). Since the coordinate origin can also be assumed at Vertices 2 and 3 on triangle
, we have three possible discrete expressions, including those in Equation (
5) for
and
. Thus, we have:
where the factor
is assumed. In the expressions, the suffix
i of
denotes the coordinate origin. The reason why the function
depends on the coordinate origin is that
is an element of
matrix
, which depends on local coordinates in general.
The expressions for
and
in Equations (
5) and (
6) correspond to those for
. In Equation (
6), the sum over triangles
in
and
can be replaced by sum over bonds
. In this replacement, we should remind ourselves of the fact that the first terms of
and
in (
6) are respectively replaced by
and
. In these expressions,
denotes the function
on the triangles
, where the coordinate origin is at vertex
i (see
Figure 2d), and
denote
for triangles
. The coefficient of
is different from that of
, and these coefficients come from the following expressions:
Thus, we have:
where the factor
is replaced by
in the final expressions of
and
. The indices
of
and
simply denote vertices
i and
j. We should note that
and
in general in Equation (
8), as mentioned above.
The partition function
Z and Hamiltonian
S of the model we start with in this paper are defined by:
where Ising model energy
with the coefficient
is included in
S. This is a surface model for multi-component membranes [
13]. The sum
in
denotes the sum over all nearest neighbor triangles + and −, and
denotes that
is defined on the triangles
. The variable
is an element of
; however,
(and
) is not always limited to the Ising-type Hamiltonian. The variable
is introduced to represent the components A and B, such as liquid-ordered and liquid-disordered phases [
13]. If
on triangle
, this triangle
is understood such that it belongs to or is occupied by the component A (B) for example. The value of
on each triangle
remains unchanged; however, the energy
does not remain constant because the combination of nearest neighbor pairs of triangles
changes due to the triangle diffusion, which is actually expected on dynamically-triangulated surfaces [
13]. In the model of [
13], the function
is independent of vertex
i and depends only on triangle
, and therefore, the value of
is uniquely determined only by
if the dependence of
on
is fixed. As a consequence, the metric
is determined by the internal variable
. In the model of Equation (
9), the dependence of
on
is not explicitly specified, because this dependence of
on
is in general independent of the well definedness of discrete surface models with non-Euclidean metric, and this well definedness is the main target in this paper.
In Z, and denote the sum over all possible configurations of and triangulations , respectively. The sum over triangulation can be simulated by the bond flips in MC simulations, and therefore, the model is grouped into the fluid surface models as mentioned in the Introduction. The symbol in denotes the triangulation, which is assumed as one of the dynamical variables of the discrete fluid model. This means that a variable corresponds to a triangulated lattice configuration. Therefore, the lattice configurations in the parameter space M are determined by . On the other hand, a lattice configuration corresponding to a given is originally considered as an ingredient of a set of local coordinate systems; two different ’s correspond to two inequivalent coordinates, which are not transformed to each other by any coordinate transformation. Recalling that the continuous Hamiltonian is invariant under general coordinated transformations, we can chose an arbitrary coordinate, such as the orthogonal coordinate for each triangle of a given . However, from Polyakov’s string theoretical point of view, the partition function is defined by the sum over all possible metrices in addition to the sum over all possible mappings . Since the metric g depends on coordinates, is considered to be corresponding to the sum over local coordinates, which is simulated by in the discrete models. Therefore, from these intuitive discussions, the Euclidean metric, for example, is forbidden in a fluid model on triangulated lattices without DT; this Euclidean metric model without DT is simply an FC model for polymerized membranes, where the surface inversion is not expected.
The symbol denotes -dimensional integrations in under the condition that the center of mass of the surface is fixed to the origin of . The Hamiltonian S has the unit of energy . The coefficient of is the bending rigidity.
Here, we comment on the property called scale invariance of the model [
35]. This comes from the fact that the integration of
in
Z is independent of the scale transformation, such that
for arbitrary positive
. This property is expressed by
, and therefore, for Hamiltonian
, we have:
In the second line of Equation (
10), we assume
, and then in the third line, we have
because
and
are scale independent and
. Thus, from the fact that the partition function is independent of the multiplicative constant, we find that the model with
is equivalent to the model with
. “Equivalent” means that the shape of the surface is independent of the value of
, although the surface size depends on
c in general. The dependence of surface size on
c is also understood from the scale-invariant property of
Z. Indeed, it follows from
that
, and therefore, we have [
35]:
This final equation implies that the mean bond length squares depends on c, because is given by where is independent of c. For a specialized case that = constant, becomes proportional to . On the other hand, the mean bond length squares in general represent the surface size for smooth surfaces, which are expected for sufficiently large .
We should note that the model studied in [
13] for a two-component membrane is obtained from the model of Equations (
8) and (
9) by the assumption that
is independent of the local coordinate origin
i and depends only on triangles
. In this case, the model is orientation symmetric, and therefore, the lower suffices
for the orientation of triangles
are not necessary. Then, we have
, where + and − are the two neighboring triangles of bond
, which links vertices
i and
j. Thus,
(and
) defined on bond
depends only on
of the two neighboring triangles in the model of [
13]. For this reason, the configuration (or distribution) of
on the surface remains unchanged if the triangulation is fixed. However, the model is defined on dynamically-triangulated lattices, which allow not only vertices, but also triangles to diffuse freely over the surface [
22,
23,
24]. This free diffusion of triangles changes the distribution of
and, hence,
and
. Moreover,
is assigned on triangles (not on vertices) such that the value of
on each triangle is determined by
. As a consequence, the corresponding energy
becomes dependent on the distribution of
or, in other words, the distribution of
and
is determined by the energy
. This is an outline of the model in [
13].
In this paper,
depends on not only triangles
, but also the local coordinate origin
i in contrast to that of the model in [
13]. We should note that the relation between
and
is not explicitly specified. Although the model is not determined without the explicit relation, the following discussions in this paper are independent of this relation.
3.3. Well-Defined Model
We start with the definition of the trivial (non-trivial) model for a discrete surface model.
Definition 1. Let us assume that Hamiltonian S of a discrete surface model is given by Equation (8). Then, this discrete model is called trivial (non-trivial) if the following conditions are (not) satisfied:where the constants are independent of bond , and these constants are not necessarily the same. We assume
in
S of Equation (
8) for simplicity. We should note that a model with
, for arbitrary coefficients
and
, is identical to the model defined by
with
. Indeed, because of the scale invariance of
Z discussed in the previous subsection using Equation (
10), the coefficient
of
in
can be replaced by one. Thus, we have
.
If the metric is conformally equivalent to the Euclidean metric, then the model is trivial. In this sense, this definition for the trivial (non-trivial) model is an extension of the definition by the terminology conformally equivalent for
discussed in
Section 3.1. However, there exists a metric that is conformally non-equivalent to
while it makes the model trivial. An example of such a metric is
, and more detailed information will be given below (in Remark 2).
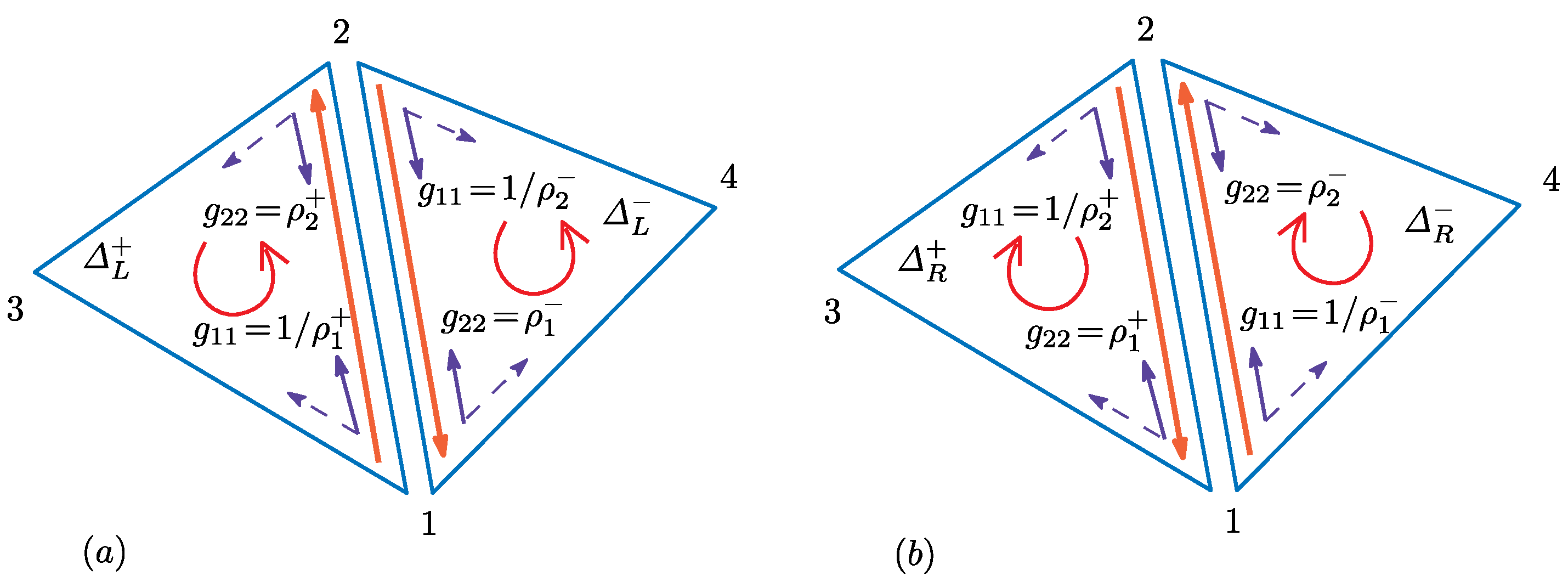
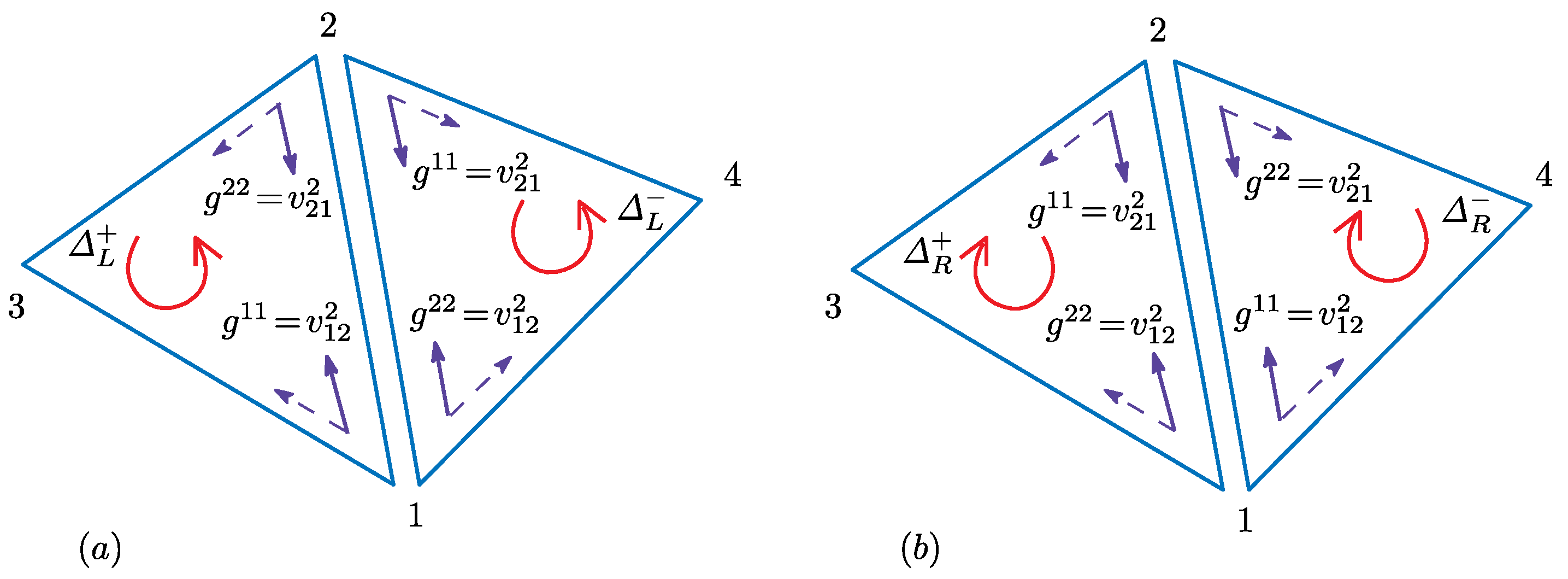
Next, we introduce the notion of direction-dependent length
(and
) of bond
, which is shared by two triangles, in the discrete model. Let
be the two nearest neighbor triangles of Bond 12 on
M (
Figure 3a). The length
of Bond 12 is defined by
, where
is the element
of the metric
on
where the local coordinate origin is at Vertex 1; the symbol
in
denotes that
is defined by
on triangle
. It is also possible to define
by
, where
is the element
on
where the local coordinate origin is at Vertex 2. Thus,
is defined by the mean value of these two lengths, and the length
of Bond 12 is also defined in exactly same manner. Then, we have:
These two lengths are different from each other in their expressions, and therefore, it appears that the bond length is dependent on its direction. For the inverted surface (shown in
Figure 3b), we also have the two different lengths:
It is also possible to define the lengths of Bond 12 as follows:
where
and
(
and
) correspond to those in Equation (
13) (Equation (
14)). The following discussions remain unchanged if
,
and
,
are assumed as the definition of bond lengths. For this reason, we use only the expressions in Equation (
13) and Equation (
14) for bond lengths in the discussions below.
Now, let us introduce the notion of a well-defined model.
Definition 2. A discrete surface model is called well defined if the following conditions are satisfied:
- (A1)
Any bond length is independent of its direction
- (A2)
Any bond length is independent of surface orientation
- (A3)
Any triangle area is independent of surface orientation
We should note that these constraints (A1)–(A3) are not imposed on Finsler geometry models, which will be introduced in the following section. Using Equations (
13) and (
14), we rewrite the first and second conditions (A1) and (A2) such that:
The condition (A3) is always satisfied because of the fact that
for the metric function in Equation (
3). Note that the constraint (A1) is imposed only on triangles
, and the equation corresponding to (A1) on triangles
is not independent of the three equations in Equations (
16) and (
17).
If we use the following definition for the bond length consistency for every vertex:
then we have
(Vertex 1 for simplicity). In this case, we have a trivial model because
.
The discrete expression of the induced metric
is given by
, which is defined on Triangle 123 in
with the local coordinate origin at
(see
Figure 2b). This
is not of the form
, and for this reason, the induced metric model is out of the scope of Definition 1. However, it is easy to see that the induced metric model satisfies (A1)–(A3) in Definition 2. Indeed, the bond length of this model is just the Euclidean length of Bond 12 in
. Other conditions are also easy to confirm.
3.4. Orientation Symmetric Model
The discrete model is defined by the Hamiltonian in Equation (
8), where
is a coordinate-dependent metric. Therefore, the Hamiltonian depends on the local coordinates on
M, and it also depends on the orientation of
M. For this reason, we define the notion of the orientation symmetric/asymmetric model defined on surfaces with
. This simply means that the Hamiltonian of Equation (
8) can be used for a model in which the partition function allows the surface inversion process. Indeed, a property of the model corresponding to symmetries in Hamiltonian can be discussed without referencing the partition function in general. Thus, the Hamiltonian is called orientation symmetric if it is invariant under the surface inversion in Equation (
2), for example for any configuration of
, and we also have:
Definition 3. A discrete surface model is called orientation symmetric if the Hamiltonian is orientation symmetric.
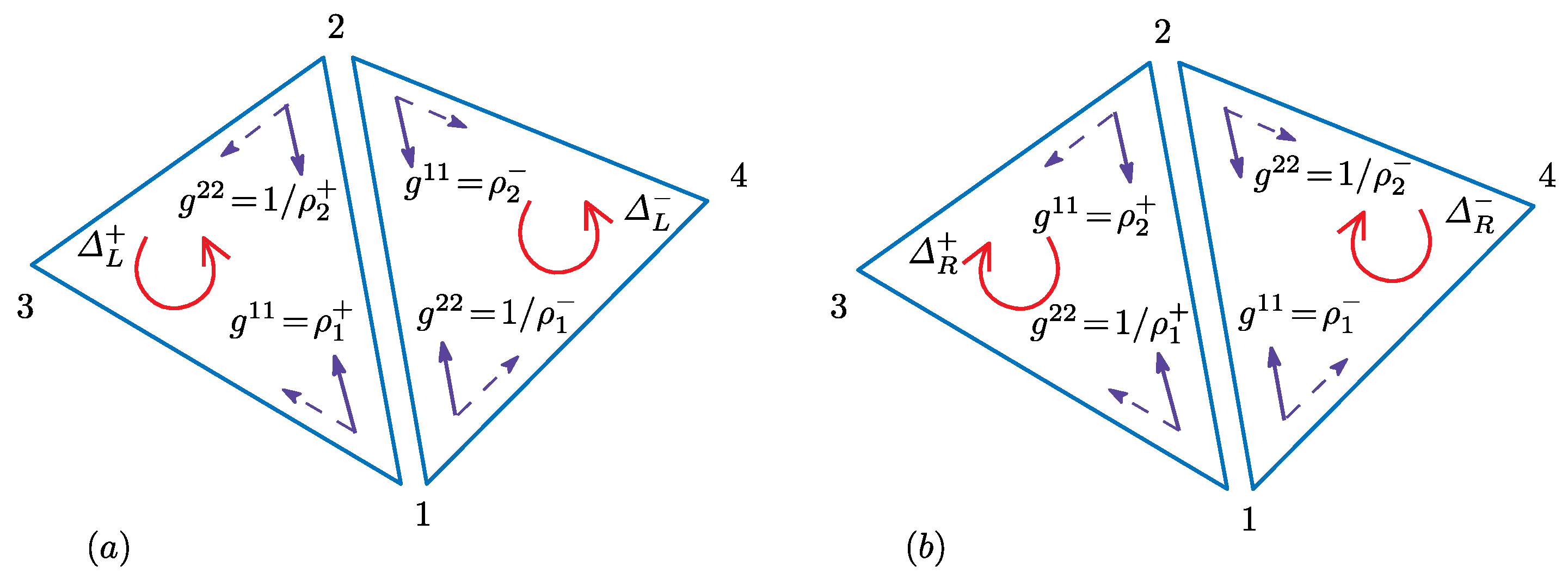
In the Hamiltonian of Equation (
8), the quantities
and
in
and
depend on the surface orientation. Thus, the condition for that the Hamiltonian is orientation symmetric is as follows:
for all bonds 12 and
. Indeed, the Gaussian bond potential
of Bond 12 is given by
(
Figure 4a), while on the inverted triangles, the corresponding quantity
is given by
. These
and
are obtained by using the following expression for the inverse metric:
Thus, from the equation
for any Bond 12, which is the condition for
to be orientation symmetric, we have Equation (
20). We should note that from the condition
for the bending energy
, the same equation as Equation (
20) is obtained.
Remark 1. We have the following remarks:
- (a)
All non-trivial models are orientation asymmetric
- (b)
All orientation asymmetric models are ill-defined
Proof of Remark 1. (a) The inverse metric
of a non-trivial model is given by Equation (
21), and therefore, it is easy to see that there exists a bond 12, such that
. Indeed, we can choose
’s such that Equation (
20) is not satisfied. This inequality
implies that the condition in Equation (
20) is not satisfied and that the model is orientation asymmetric. (b) ⇔ All well-defined models are orientation symmetric, which can be proven as follows: if the model is well-defined, then Equations (
16) and (
17) are satisfied. Then, it is easy to see that Equation (
20) is satisfied. This implies that the model is orientation symmetric. ☐
From Remark 1, it is straightforward to prove the following theorem:
Theorem 1. All non-trivial models are ill-defined.
Here, we should clarify how well-defined models are different from the model with Euclidean metric . This problem is rephrased such that what type of is allowed for a well-defined model. The answer is as follows:
Remark 2. We have the following remarks:
- (a)
The function of any well-defined model satisfies:where the constant a depends on neither vertex i, nor triangle Δ. - (b)
There are two possible ρs, which are solutions of Equation(
22):
- (c)
If Equation (
22)
is satisfied, then the model is trivial.
Proof of Remark 2. (a) A well-defined model satisfies Equations (
16) and (
17). Multiplying both sides of the first equation in Equation (
17) by
, we have
, and therefore,
. It is also easy to see that
from the second equation in Equation (
17). Therefore, using these two equations and Equation (
16), we have
. This implies that the combination
is independent of the vertex and triangle, and thus, Equation (
22) is proven. (b) It is easy to see that
, (
) from Equation (
22). (c) Indeed, using Equation (
22), we have
, and therefore,
and
. ☐
It follows from Remark 2(a) that the model in [
13] is ill-defined (in the context of HP model). In fact, the metric function assumed in the model of [
13] does not satisfy Equation (
22). The metric corresponding to Remark 2(b) shows examples of metric for the trivial model, which is defined by Definition 1. More explicitly,
and
make the model trivial. The metrices
and
are conformally equivalent to
, because
, and therefore, these also make the model trivial. We should remark that Remarks 2(a) and 2(c) also prove Theorem 1.
Note also that if a model is well-defined and orientation symmetric in the sense of Definitions 2 and 3, then inverted triangles
need not be included in the lattice configuration. However, from Theorem 1, the model introduced in Equation (
8) is orientation asymmetric, and this model turns out to be well-defined if it is treated as an FG model. Therefore the inverted triangles
should be included as a representation configuration of the model of Equation (
8) if it is understood as a well-defined model. For this reason, we have to extend the FG model introduced in [
15] such that the Hamiltonian has values on both
and
.


{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}





