
Study on the Static Characteristics of a Pre-Pressure Single-Action Membrane-Type Restrictor Used in a Single Oil Pad


Abstract
:1. Introduction
2. Theoretical Modeling
2.1. Pre-Pressure Single-Action Membrane-Type Restrictor
2.2. Flow Rate Equation
2.3. Load Capacity
2.4. Membrane Deflection
2.5. Static Stiffness in the Design State
2.6. Static Characteristics Analysis
3. Numerical Simulation
3.1. Numerical Model
3.2. Orthogonal Experiment
3.3. Comparison of Static Characteristics of Three Types of Restrictors
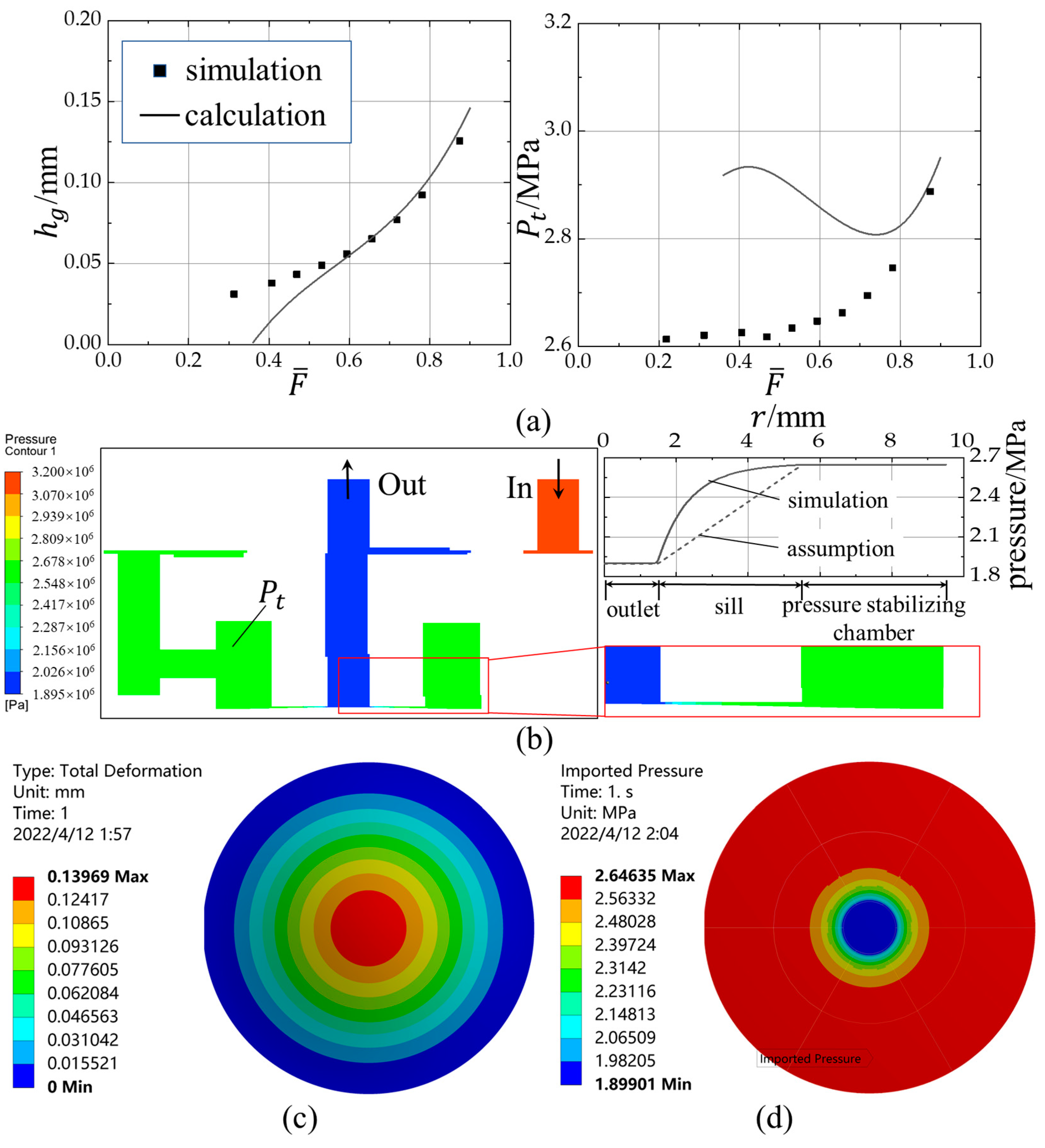
3.4. Analysis and Discussion of the Membrane-Type Restrictor
4. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Conflicts of Interest
Nomenclature
| width of oil sealing border | |
| unevenness coefficient of the pad | |
| the effective area of the oil pad | |
| width of annular rectangular groove or annular capillary | |
| width of oil pad | |
| absolute displacement of the geometric center of the pad | |
| elastic module | |
| external load, the initial load of hydrostatic bearing | |
| the dimensionless load factor | |
| the clearance of the pad | |
| the gap between membrane and cylindrical sill | |
| , | and in the initial state |
| increment of the gap between the membrane and cylindrical sill | |
| depth of annular rectangular groove or annular capillary | |
| the assembly gap of the membrane | |
| the average static stiffness of the oil pad | |
| flow coefficient of the rectangular groove | |
| Length of oil pad | |
| Poisson’s ratio | |
| membrane deformation coefficient | |
| supply pressure, regulating chamber pressure | |
| pressure stabilizing chamber pressure | |
| the outlet pressure of restrictor | |
| , | and in the initial state |
| increment of outlet pressure | |
| the flow rate of restrictor | |
| in the initial state | |
| mid-diameter of annular rectangular groove or annular capillary | |
| , | inner radius, outer radius of restrictor sill |
| radius of membrane | |
| fixed flow resistance for annular rectangular groove, annular capillary | |
| variable flow resistance of membrane restrictor, the gap between the membrane and the cylindrical sill, and the parallel oil circuit, respectively | |
| flow resistance of the pad | |
| , , , | , , and in the initial state |
| , , | the error of , , and |
| membrane thickness | |
| load capacity | |
| restriction ratio | |
| the design restriction ratio | |
| , , , | membrane deflection at |
| the relative displacement of the geometric center of the pad | |
| oil dynamic viscosity | |
| , , , | flow resistance ratio |
| , , , | the design flow resistance ratio |
| density |
References
- Ding, Z. Fluid Hydrostatic Support Design, 1st ed.; Shanghai Scientific and Technical Publisher: Shanghai, China, 1989; pp. 1–65. [Google Scholar]
- Shi, C.; Wang, Z.; Peng, Y.; Lei, P.; Li, C. Quasi-static kinematics model for motion errors of closed hydrostatic guideways in ultra-precision machining. Precis. Eng. 2021, 71, 90–102. [Google Scholar] [CrossRef]
- Moris, S.A. Passively and actively controlled externally pressurized oil-film bearing. J. Lubr. Tech. 1972, 94, 56–63. [Google Scholar] [CrossRef]
- Sharma, S.C.; Sinhasan, R.; Jain, S.C. Performance characteristics of multiaccess hydrostatic/hybrid flexible journal bearing with membrane-type variable-flow restrictor as compensating elements. Wear 1992, 152, 279–300. [Google Scholar] [CrossRef]
- PM-Regler-Fuer-Fuehrungen. Available online: https://hyprostatik.de/produkte-service/pm-regler-fuer-fuehrungen/ (accessed on 20 November 2021).
- Lai, T.H.; Chang, T.Y.; Yang, Y.L.; Lin, S.C. Parameters design of a membrane-type restrictor with single-pad hydrostatic bearing to achieve high static stiffness. Tribol. Int. 2017, 107, 206–212. [Google Scholar] [CrossRef]
- Lai, T.H.; Lin, S.C. A simulation study for the design of membrane restrictor in an opposed-pad hydrostatic bearing to achieve high static stiffness. Lubricants 2018, 6, 71. [Google Scholar] [CrossRef] [Green Version]
- Gohara, M.; Somaya, K.; Miyatake, M.; Yoshimoto, S. Static characteristics of a water-lubricated hydrostatic thrust bearing using a membrane restrictor. Tribol. Int. 2014, 75, 111–116. [Google Scholar] [CrossRef]
- Chen, D.C.; Chen, M.F.; Pan, C.H.; Pan, J.Y. Study of membrane restrictors in hydrostatic bearing. Adv. Mech. Eng. 2018, 10, 1–8. [Google Scholar] [CrossRef] [Green Version]
- Kang, Y.; Shen, P.C.; Chang, Y.P.; Lee, H.H.; Chiang, C.P. Modified predictions of restriction coefficient and flow resistance for membrane-type restrictors in hydrostatic bearing by using regression. Tribol. Int. 2007, 40, 1369–1380. [Google Scholar] [CrossRef]
- Kang, Y.; Shen, P.C.; Chen, C.H.; Chang, Y.P.; Lee, H.H. Modified determination of fluid resistance for membrane-type restrictors. Ind. Lubr. Tribol. 2007, 59, 123–131. [Google Scholar] [CrossRef]
- Kang, Y.; Peng, D.X.; Hung, Y.H.; Hu, S.Y.; Lin, S.C. Design for static stiffness of hydrostatic bearings: Double-action variable compensation of membrane-type restrictors and self-compensation. Ind. Lubr. Tribol. 2014, 66, 322–334. [Google Scholar] [CrossRef]
- Kang, Y.; Chen, C.; Chen, Y.; Chang, C.; Hsiao, S. Parameter identification for single-action membrane-type restrictors of hydrostatic bearings. Ind. Lubr. Tribol. 2012, 64, 39–53. [Google Scholar] [CrossRef]
- Zhu, Y.H.; Liu, J.T.; Yang, J.X.; Bai, K. Design analysis of new structure of membrane restriction of liquid hydrostatic bearing. Bearing 2007, 3, 27–30. [Google Scholar]
- Ram, N.; Sharma, S.C. Influence of wear on the performance of hole-entry hybrid misaligned journal bearing in turbulent regime. Ind. Lubr. Tribol. 2014, 66, 509–519. [Google Scholar] [CrossRef]
- Cravero, C.; Marogna, N.; Marsano, D. A Numerical Study of correlation between recirculation length and shedding frequency in vortex shedding phenomena. WSEAS Trans. Fluid Mech. 2021, 16, 48–62. [Google Scholar] [CrossRef]
- Shi, L.; Yang, G.; Yao, S. Large eddy simulation of flow past a square cylinder with rounded leading corners: A comparison of 2D and 3D approaches. J. Mech. Sci. Technol. 2018, 32, 2671–2680. [Google Scholar] [CrossRef]
- Guo, H.; Xia, B.Q.; Cen, S.Q. Performance Analysis of High Speed Floating Ring Hybrid Bearing in the Laminar and Turbulent Regimes. AMR 2011, 197–198, 1776–1780. [Google Scholar] [CrossRef]
- Hanawa, N.; Kuniyoshi, M.; Miyatake, M.; Shigeka, Y. Static characteristics of a water-lubricated hydrostatic thrust bearing with a porous land region and a capillary restrictor. Precis. Eng. 2017, 50, 293–307. [Google Scholar] [CrossRef]
- Yuan, X.; Zhang, G.; Li, B.; Miao, X. Theoretical and experimental results of water-lubricated, high-speed, short-capillary-compensated hybrid journal bearings. In Proceedings of the International Joint Tribology Conference, San Antonio, TX, USA, 23–25 October 2006. [Google Scholar]
- Gao, D.; Zhao, J.; Zhang, Z.; Zheng, D. Research on the Influence of PM Controller Parameters on the Performance of Hydrostatic Slide for NC Machine Tool. J. Mech. Eng. 2011, 47, 186–194. [Google Scholar] [CrossRef]
- Chen, L.; Cui, B.; Zhao, J.; Gao, D. Influence of parameters of PM controller on vibration performance of liquid hydrostatic guide-way system. Noise Vib. Worldw. 2018, 49, 140–146. [Google Scholar] [CrossRef]
- Dong, W.; Li, B.; Wu, C.; Zhou, Q.; Guo, W. Optimization Design Method for Hydrostatic Guideway Based on PM Restrictor. In Proceedings of the IOP Conference Series: Materials Science and Engineering, Chongqing, China, 18–21 July 2019. [Google Scholar]
- Lin, T.Z. The Comparison of the Characteristcs for the New Type Design of Membrane Regulators. Master’s Thesis, Chung Yuan Christian University, Taoyuan, Taiwan, July 2005. [Google Scholar]
- Chen, Y. Hydrostatic Bearing Principle and Design, 1st ed.; National Defense Industry Press: Beijing, China, 1980; pp. 1–200. [Google Scholar]
- Guangzhou Mechanical Engineering Research Institute Co., Ltd. Principle and Application of Hydrostatic Bearing, 1st ed.; China Machine Press: Beijing, China, 1978; pp. 1–85. [Google Scholar]
- Lu, J. Error analysis of parallel resistance. Meas. Tech. 1981, 7, 43–44. [Google Scholar]














{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Parameters | Value | Parameters | Value |
|---|---|---|---|
| length of oil pad L/mm | 200 | width of oil sealing border a/mm | 12 |
| width of oil pad B/mm | 75 | /mm | 0.025 |
| /mm2 | 11,844 | /MPa | 3.2 |
| Levels | Factors | ||
|---|---|---|---|
| A | B | C | |
| 1 | 0.004 | 1.137 | 2.100 |
| 2 | 0.386 | 2.493 | 1.500 |
| 3 | 0.198 | 1.623 | 0.880 |
| No. | A | B | C | Blank Column | t/mm | ||
|---|---|---|---|---|---|---|---|
| 1 | 1 | 1 | 1 | 1 | 0.3729 | 0.1081 | 1214 |
| 2 | 1 | 2 | 2 | 2 | 0.4406 | 0.0921 | 1453 |
| 3 | 1 | 3 | 3 | 3 | 0.4098 | 0.0979 | 1461 |
| 4 | 2 | 1 | 2 | 3 | 0.2681 | 0.3658 | 1941 |
| 5 | 2 | 2 | 3 | 1 | 0.3041 | 0.2738 | 1873 |
| 6 | 2 | 3 | 1 | 2 | 0.2897 | 0.3048 | 1807 |
| 7 | 3 | 1 | 3 | 2 | 0.3242 | 0.1881 | 1941 |
| 8 | 3 | 2 | 1 | 3 | 0.3761 | 0.1457 | 1743 |
| 9 | 3 | 3 | 2 | 1 | 0.3521 | 0.1623 | 1835 |
| 1376.0 | 1718.3 | 1588.0 | 1640.6 | ||||
| 1873.7 | 1689.7 | 1743.0 | 1753.3 | ||||
| 1859.3 | 1701.0 | 1778.0 | 1715.0 | ||||
| Range | 497.7 | 28.7 | 190.0 | 112.7 | |||
| Factor Priority | A, C, B | ||||||
| No. | The Design Dimensionless Load Factor | Design Pressure Ratio | ||||||
|---|---|---|---|---|---|---|---|---|
| Capillary Restrictor | SMRWP | PSMR | ||||||
| 1 | 0.66 | 1.7 | 1.7 | 0.198 | 1.137 | 0.88 | 0.3242 | 0.1881 |
| 2 | 0.5 | 2 | 2 | 0.228 | 1.623 | 1.30 | 0.3257 | 0.2094 |
| 3 | 0.4 | 2.5 | 2.5 | 0.374 | 5.476 | 1.40 | 0.3418 | 0.2109 |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2022 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Lu, F.; Wang, Z.; Lei, P.; Chen, Y. Study on the Static Characteristics of a Pre-Pressure Single-Action Membrane-Type Restrictor Used in a Single Oil Pad. Machines 2022, 10, 302. https://doi.org/10.3390/machines10050302
Lu F, Wang Z, Lei P, Chen Y. Study on the Static Characteristics of a Pre-Pressure Single-Action Membrane-Type Restrictor Used in a Single Oil Pad. Machines. 2022; 10(5):302. https://doi.org/10.3390/machines10050302
Chicago/Turabian StyleLu, Feng, Zhenzhong Wang, Pengli Lei, and Yi Chen. 2022. "Study on the Static Characteristics of a Pre-Pressure Single-Action Membrane-Type Restrictor Used in a Single Oil Pad" Machines 10, no. 5: 302. https://doi.org/10.3390/machines10050302
APA StyleLu, F., Wang, Z., Lei, P., & Chen, Y. (2022). Study on the Static Characteristics of a Pre-Pressure Single-Action Membrane-Type Restrictor Used in a Single Oil Pad. Machines, 10(5), 302. https://doi.org/10.3390/machines10050302