
Effects of Snake-Bioinspired Surface Texture on the Finger-Sealing Performance under Varied Working Conditions


Abstract
:1. Introduction
2. Materials and Methods
2.1. Geometrical Model
2.1.1. Finger Seal
2.1.2. Surface Textures
2.2. Mathematical Model
2.2.1. Modelling Assumption
- A1.
- The inertial force (e.g., centrifugal pull) and volume force (e.g., gravity) are neglected.
- A2.
- The fluid slip of the friction interface is neglected.
- A3.
- No deformation of the finger seal and rotor exists.
- A4.
- The pressure variation along the film thickness is neglected.
- A5.
- The effects of surface roughness of the rotor and finger seal are neglected.
- A6.
- The variations of viscosity and temperature in the flow field are neglected.
2.2.2. Control Equation
2.2.3. State Equation
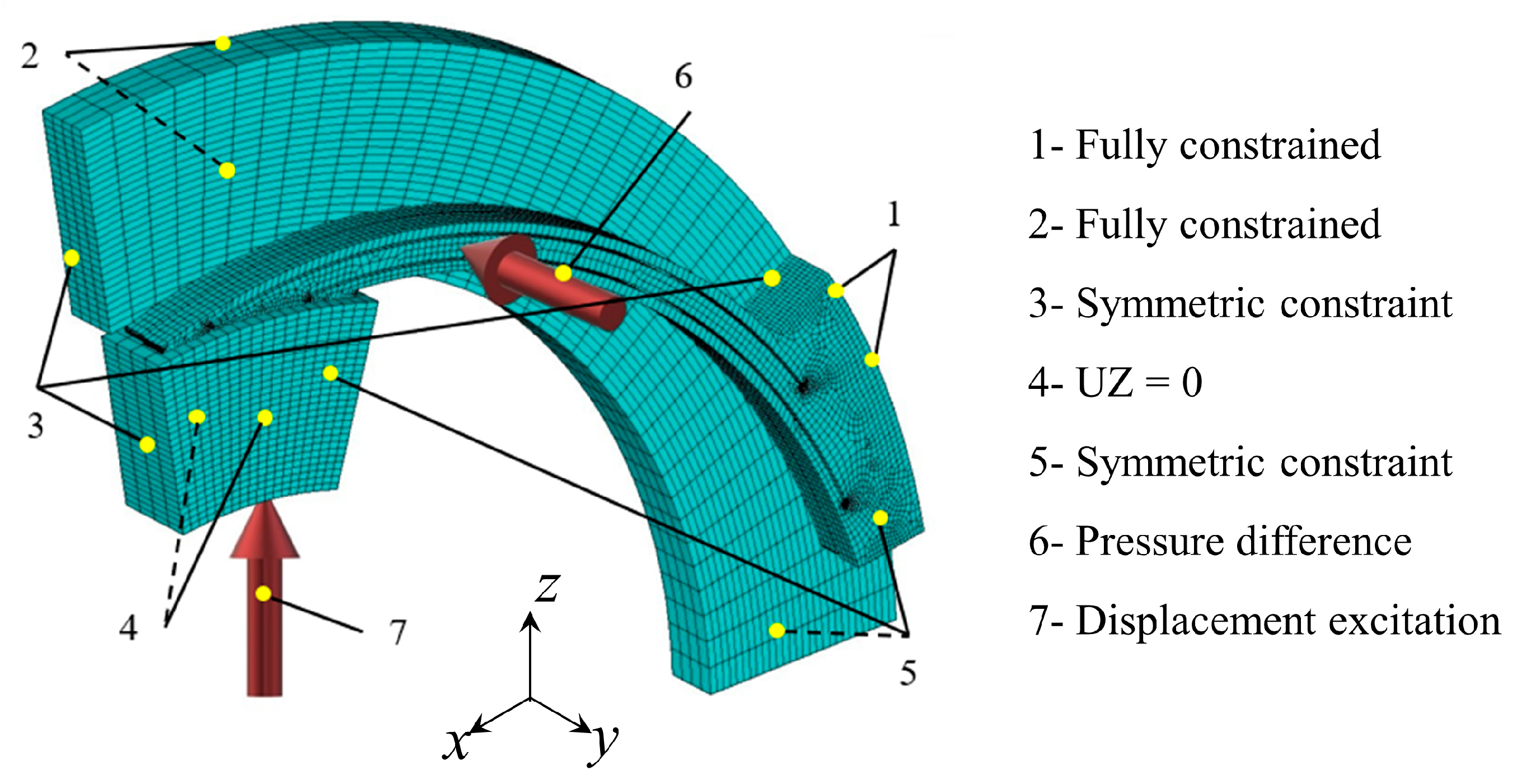
2.2.4. Boundary Conditions
- Compulsory boundaries.
- 2.
- Periodic boundaries.
- 3.
- Cavitation boundaries.
2.2.5. Sealing Performance Parameters
2.3. Numerical Solution
2.4. Calculation Parameters and Working Condition Settings
3. Results and Discussion
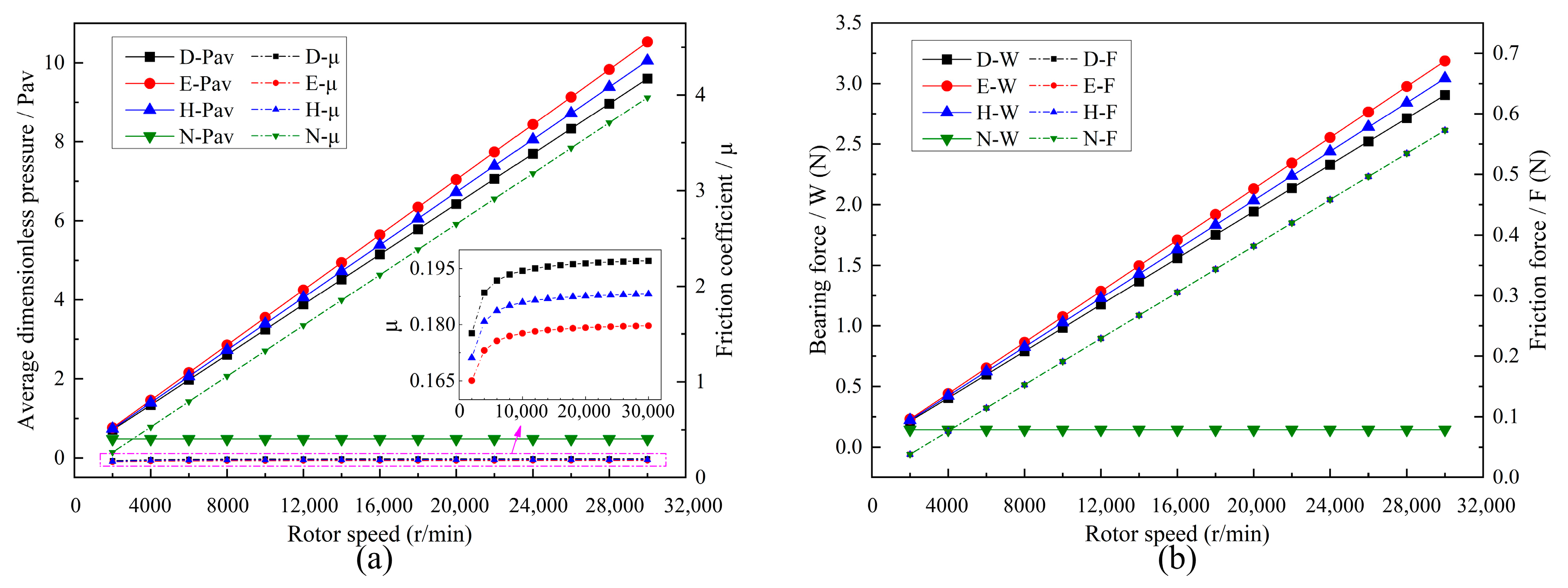
3.1. Effect of the Rotation Speed
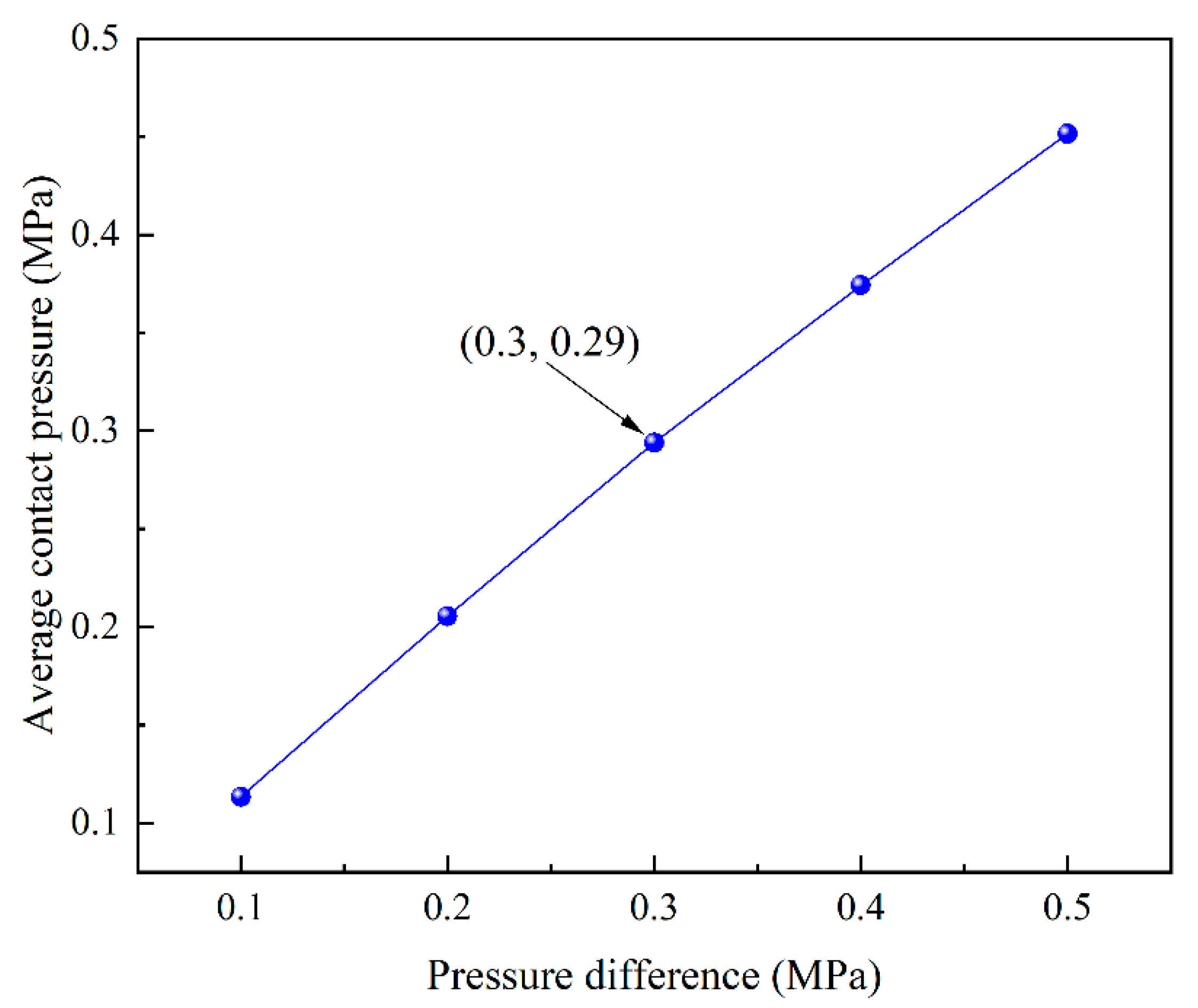
3.2. Effect of the Pressure Difference
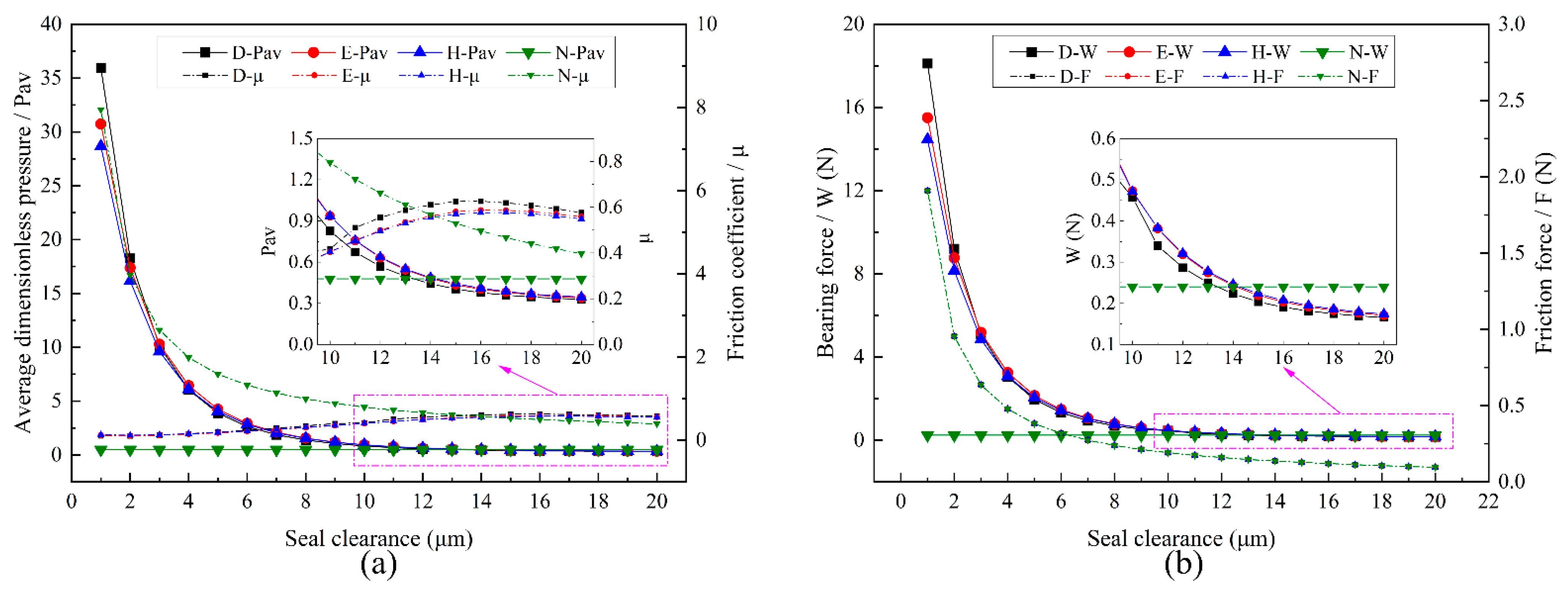
3.3. Effect of the Seal Clearance
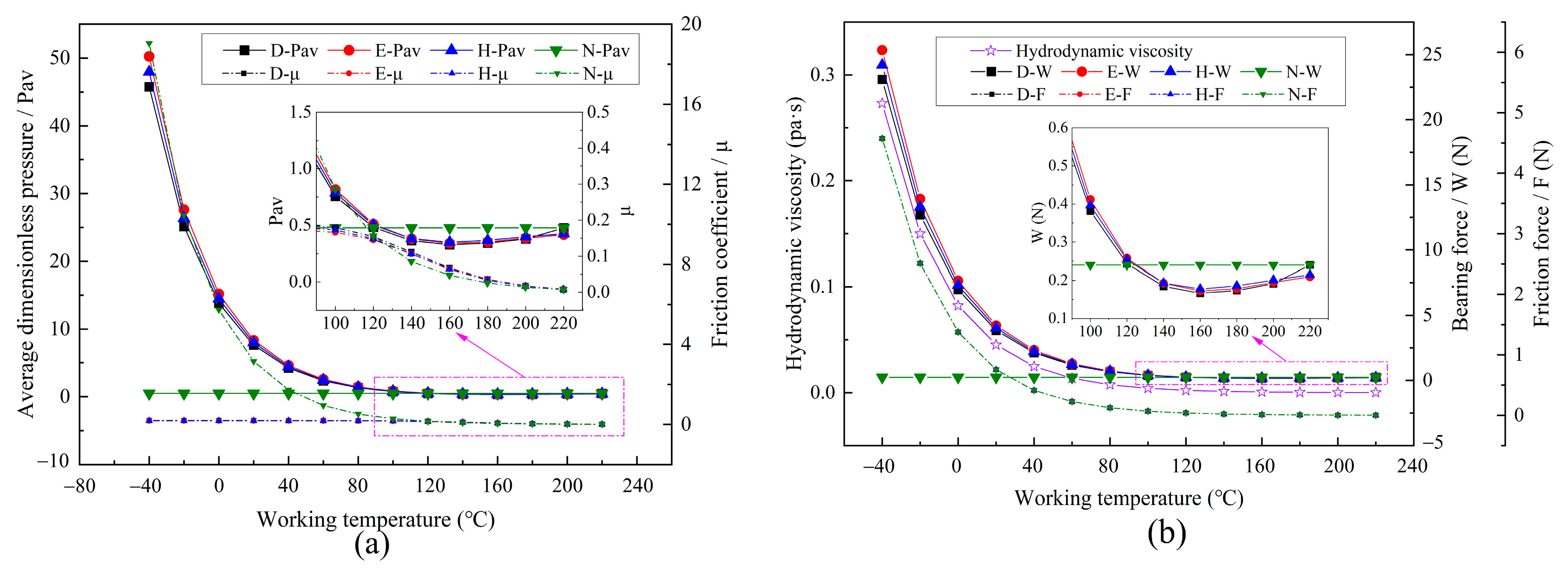
3.4. Effect of the Working Temperature
4. Conclusions
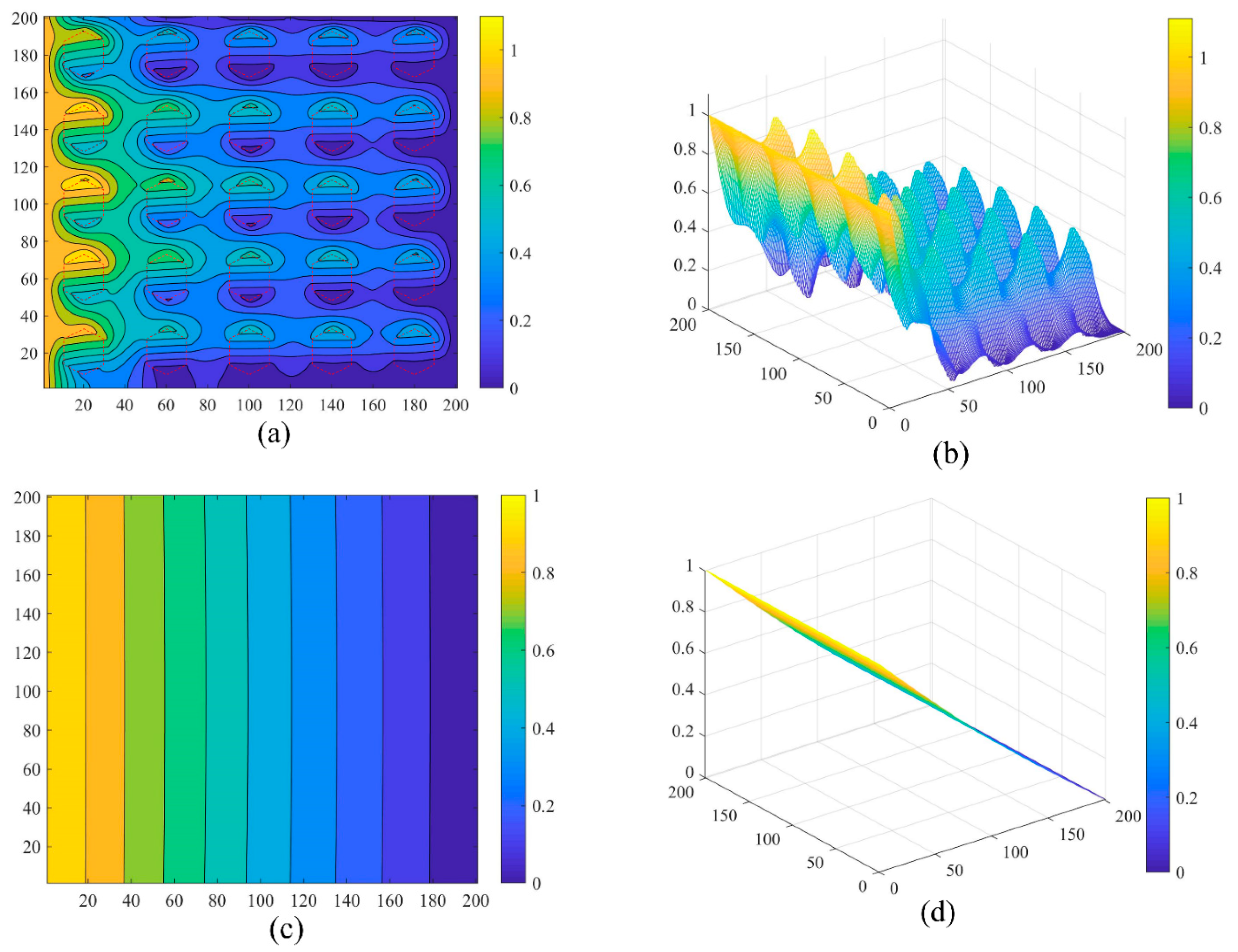
- The hydrodynamic effect and cavitation phenomenon are produced in the three textured calculation domains. There is a set of peak and valley values of the dimensionless pressure (P) in each micro-texture unit, which effectively improves the bearing capacity of the finger seal.
- Within the rotation speed range of 3000~30,000 rpm, the finger seals with snake-bioinspired textures have better anti-friction and wear resistance as compared to the non-textured counterpart. Moreover, the higher the rotation speed, the more obvious the advantage of the textured finger seals.
- Within the pressure difference range of 0~1 MPa, textured finger seals have excellent antifriction and wear resistance. However, once it exceeds 1 MPa, the axial movement of the fluid is enhanced, and the pressure relief of the textured finger seals is stronger, which can weaken the effects of textured finger seals or even worsen.
- For good antifriction and wear resistance of the textured finger seals, the seal clearance should be as shallow as possible (≤10 μm), and the working temperature should be as low as possible (≤120 °C).
- Under the varied working conditions, the ellipse textured finger seal has a higher average dimensionless pressure (Pav) and a lower friction coefficient (μ) compared with the diamond and hexagon ones, which indicates its better anti-friction and wear resistance.
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Acknowledgments
Conflicts of Interest
Nomenclature
| Symbol | Description | Unit |
| Errp | Error limit | |
| F | Friction force | N |
| h | Thickness of local fluid film | m |
| H | Dimensionless thickness of the fluid film | |
| hc | Seal clearance (installation clearance between rotor and finger feet) | m |
| ht | Texture depth | m |
| k | Iteration number | |
| L | Typical length of friction pair | m |
| p | Fluid film pressure | MPa |
| P | Dimensionless pressure of the fluid film | |
| pa | Ambient pressure | MPa |
| Pav | Average dimensionless pressure | |
| pc | Cavitation pressure | MPa |
| pI | Inlet pressure (also refers to the inlet/outlet pressure difference of finger seal) | MPa |
| pO | Outlet pressure (set to 0) | MPa |
| R | Rotor radius | mm |
| S | Texture area ratio | m2 |
| Sr | Area of the rotor | m2 |
| St | Area of the surface texture | m2 |
| T | Working temperature | °C |
| W | Bearing force of the fluid film | N |
| X | Dimensionless horizontal coordinate | |
| xr | Rotor length | m |
| Y | Dimensionless longitudinal coordinate | |
| yr | Rotor width | m |
| α | Relaxation factor | |
| δ | Clearance ratio | |
| η | Hydrodynamic viscosity | Pa·s |
| Λ | Working condition parameter of finger seal | |
| μ | Friction coefficient | |
| ω | Rotation speed | rpm |
| Ωc | Region of cavitation | |
| Ωt | Region of texture |
Appendix A

{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Structure Parameters | Value |
|---|---|
| Rotor radius (mm) | 40 |
| Out radius of finger seal (mm) | 55 |
| Root radius of finger seal (mm) | 50 |
| Base radius (mm) | 8 |
| Number of finger beams (per piece) | 33 |
| Finger beam clearance angle (°) | 0.3 |
| Downstream protection height (mm) | 0.5 |
| Finger laminate thickness (mm) | 0.2 |



References
- Zhang, Y.C.; Yin, M.H.; Zeng, Q.R.; Wang, T.; Wang, R. Theoretical and Experimental Investigation of Variable Stiffness Finger Seal. Tribol. Trans. 2020, 63, 634–646. [Google Scholar] [CrossRef]
- Chen, L.; Zhang, Y.; Cui, Y.; Zhi, B.; Wang, J.; Wang, M. Numerical Investigation on Sealing Performance of Non-Contact Finger Seal with Herringbone Groove Surface Topography. Surf. Topogr. Metrol. Prop. 2021, 9, 45041. [Google Scholar] [CrossRef]
- Zhao, H.L.; Chen, G.D.; Wang, L.N.; Su, H. Dynamic Analysis of Finger Seal in the Complex Working State. Proc. Inst. Mech. Eng. Part G-J. Aerosp. Eng. 2019, 233, 125–137. [Google Scholar] [CrossRef]
- Hua-lei, B.A.I. Analysis of Hysteresis and Forming Method for Finger Seal with Arc Shape Curve. Aeroengine 2014, 40, 49–51. [Google Scholar] [CrossRef]
- Lu, F.; Liu, J.; Lu, H.Y. Experimental Study on Leakage and Wear Characteristics of C/C Composite Finger Seal. Ind. Lubr. Tribol. 2020, 72, 1133–1138. [Google Scholar] [CrossRef]
- Zhang, Y.C.; Si, C.G.; Zhang, Y.T.; Zhang, D.Y.; Cui, Y.H. Effect of Wear-Resistant Coatings on the Comprehensive Performance of Finger Seal. Proc. Inst. Mech. Eng. Part J-J. Eng. Tribol. 2019, 233, 570–579. [Google Scholar] [CrossRef]
- Wang, J.; Zhang, Y.; Cui, Y.; Zhai, Z.; Chen, L.; Lu, J. Numerical Investigation of Residual Stress in Plasma Sprayed Antifriction Wear-Resistant Sealing Coatings on GH4169 Superalloy Substrate. Mater. Today Commun. 2022, 31, 103595. [Google Scholar] [CrossRef]
- Zhao, H.; Sun, Q.; Deng, X.; Cui, J. Earthworm-Inspired Rough Polymer Coatings with Self-Replenishing Lubrication for Adaptive Friction-Reduction and Antifouling Surfaces. Adv. Mater. 2018, 30, e1802141. [Google Scholar] [CrossRef]
- Li, C.; Yang, Y.; Yang, L.; Shi, Z. Biomimetic Anti-Adhesive Surface Microstructures on Electrosurgical Blade Fabricated by Long-Pulse Laser Inspired by Pangolin Scales. Micromachines 2019, 10, 816. [Google Scholar] [CrossRef] [Green Version]
- Abdel-Aal, H.A.; El Mansori, M.; Zahouani, H. A Comparative Study of Frictional Response of Shed Snakeskin and Human Skin. Wear 2017, 376, 281–294. [Google Scholar] [CrossRef] [Green Version]
- Quan, S.; Yong, G.; Jun, G.; Liu, X.; Jin, Y.; Yang, S. Effect of Fish Scale Texture on Friction Performance for Reciprocating Pair with High Velocity. Ind. Lubr. Tribol. 2020, 72, 497–502. [Google Scholar] [CrossRef]
- Yamagishi, R.; Maeda, H.; Kasuga, T. Water Wettability Dependence on Surface Structure of a Snail Shell. Bioinspir. Biomim. 2020, 15, 036001. [Google Scholar] [CrossRef] [PubMed]
- Geraldi, N.R.; Dodd, L.E.; Xu, B.B.; Wood, D.; Wells, G.G.; McHale, G.; Newton, M.I. Bioinspired Nanoparticle Spray-Coating for Superhydrophobic Flexible Materials with Oil/Water Separation Capabilities. Bioinspir. Biomim. 2018, 13, 21931884. [Google Scholar] [CrossRef] [PubMed]
- Lin, Q.; Wei, Z.; Wang, N.; Chen, W. Effect of Large-Area Texture/Slip Surface on Journal Bearing Considering Cavitation. Ind. Lubr. Tribol. 2015, 67, 216–226. [Google Scholar] [CrossRef]
- Yin, B.; Zhou, H.; Xu, B.; Jia, H. The Influence of Roughness Distribution Characteristic on the Lubrication Performance of Textured Cylinder Liners. Ind. Lubr. Tribol. 2019, 71, 486–493. [Google Scholar] [CrossRef]
- Jiang, J.; Zhao, W.; Peng, X.; Li, J. A Novel Design for Discrete Surface Texture on Gas Face Seals Based on a Superposed Groove Model. Tribol. Int. 2020, 147, 325. [Google Scholar] [CrossRef]
- Pan, C.; Li, Q.; Hu, K.; Jiao, Y.; Song, Y. Study on Surface Roughness of Gcr15 Machined by Micro-Texture PCBN Tools. Machines 2018, 6, 42. [Google Scholar] [CrossRef] [Green Version]
- Liu, X.; Zhang, J.; Li, L.; Huang, W. Theoretical and Simulation Analysis on Fabrication of Micro-Textured Surface under Intermittent Cutting Condition by One-Dimensional Ultrasonic Vibration-Assisted Turning. Machines 2022, 10, 166. [Google Scholar] [CrossRef]
- Korpela, T.; Suvanto, M.; Pakkanen, T.T. Friction and Wear of Periodically Micro-Patterned Polypropylene in Dry Sliding. Wear 2012, 289, 1–8. [Google Scholar] [CrossRef]
- Pattnayak, M.R.; Pandey, R.K.; Dutt, J.K. Effects of New Micro-Pocketed Bore Surface Topographies on the Performance Behaviours of Aerodynamic Journal Bearing. Surf. Topogr. Metrol. Prop. 2021, 9, 2. [Google Scholar] [CrossRef]
- Tala-Ighil, N.; Fillon, M. A Numerical Investigation of Both Thermal and Texturing Surface Effects on the Journal Bearings Static Characteristics. Tribol. Int. 2015, 90, 228–239. [Google Scholar] [CrossRef]
- Tiner, C.; Bapat, S.; Nath, S.D.; Atre, S.V.; Malshe, A. Exploring Convergence of Snake-Skin-Inspired Texture Designs and Additive Manufacturing for Mechanical Traction. Procedia Manuf. 2019, 34, 640–646. [Google Scholar] [CrossRef]
- Ballesteros, L.M.; Zuluaga, E.; Cuervo, P.; Rudas, J.S.; Toro, A. Tribological Behavior of Polymeric 3D-Printed Surfaces with Deterministic Patterns Inspired in Snake Skin Morphology. Surf. Topogr. Metrol. Prop. 2021, 9, 014002. [Google Scholar] [CrossRef]
- Greiner, C.; Schäfer, M. Bio-Inspired Scale-like Surface Textures and Their Tribological Properties. Bioinspiration Biomim. 2015, 10, 44001. [Google Scholar] [CrossRef]
- Cuervo, P.; López, D.A.; Cano, J.P.; Sánchez, J.C.; Rudas, S.; Estupiñán, H.; Toro, A.; Abdel-Aal, H.A. Development of Low Friction Snake-Inspired Deterministic Textured Surfaces. Surf. Topogr. Metrol. Prop. 2016, 4, 024013. [Google Scholar] [CrossRef] [Green Version]
- Sánchez, J.C.; Toro, A.; Estupiñán, H.A.; Leighton, G.J.T.; Endrino, J.L. Fabrication of Bio-Inspired Deterministic Surfaces by Photochemical Machining for Tribological Applications. Tribol. Int. 2020, 150, 1353–1357. [Google Scholar] [CrossRef]
- Bapat, S.; Tiner, C.; Rajurkar, K.; Nath, S.; Atre, S.; Malshe, A. Understanding Biologicalisation of the Snake-Skin Inspired Textures through Additive Manufacturing for Mechanical Traction. CIRP Ann. 2020, 69, 201–204. [Google Scholar] [CrossRef]
- Chen, L.; Zhang, Y.; Cui, Y.; Wang, J.; Wang, M. Effect of Snake-Biomimetic Surface Texture on Finger Sealing Performance under Hydrodynamic Lubrication. Surf. Topogr. Metrol. Prop. 2021, 9, 035040. [Google Scholar] [CrossRef]
- Yin, M.; Zhang, Y.; Zhou, R.; Zhai, Z.; Wang, J.; Cui, Y.; Li, D. Friction Mechanism and Application of PTFE Coating in Finger Seal. Tribol. Trans. 2021, 65, 260–269. [Google Scholar] [CrossRef]
- Liu, D.; Wang, S.; Zhang, C.; Tomovic, M.M. Numerical Study of the Effects of Textured Shaft on the Wear of Rotary Lip Seals. Tribol. Int. 2019, 138, 215–238. [Google Scholar] [CrossRef]
- Uddin, M.S.; Liu, Y.W. Design and Optimization of a New Geometric Texture Shape for the Enhancement of Hydrodynamic Lubrication Performance of Parallel Slider Surfaces. Biosurface Biotribol. 2016, 2, 59–69. [Google Scholar] [CrossRef] [Green Version]
- Venkateswara babu, P.; Syed, I.; BenBeera, S. Experimental Investigation on Effects of Positive Texturing on Friction and Wear Reduction of Piston Ring/Cylinder Liner System. Mater. Today Proc. 2020, 24, 1112–1121. [Google Scholar] [CrossRef]
- Liu, W.; Ni, H.; Chen, H.; Wang, P. Numerical Simulation and Experimental Investigation on Tribological Performance of Micro-Dimples Textured Surface under Hydrodynamic Lubrication. Int. J. Mech. Sci. 2019, 163, 105095. [Google Scholar] [CrossRef]
- Liu, W.; Ni, H.; Wang, P.; Chen, H. Investigation on the Tribological Performance of Micro-Dimples Textured Surface Combined with Longitudinal or Transverse Vibration under Hydrodynamic Lubrication. Int. J. Mech. Sci. 2020, 174, 105474. [Google Scholar] [CrossRef]
- Shen, Z.; Wang, F.; Chen, Z.; Ruan, X.; Zeng, H.; Wang, J.; An, Y.; Fan, X. Numerical Simulation of Lubrication Performance on Chevron Textured Surface under Hydrodynamic Lubrication. Tribol. Int. 2021, 154, 106704. [Google Scholar] [CrossRef]
- Ma, C.; Zhu, H.; Sun, J. Applicable Equation Study of Lubrication Calculation of Surface Texture Based on CFD Analysis. Chin. J. Mech. Eng. 2011, 47, 95. [Google Scholar] [CrossRef]
- Dowson, D.; Taylor, C.M. Cavitation in Bearings. Annu. Rev. Fluid Mech. 1979, 11, 35–66. [Google Scholar] [CrossRef]
- Wang, D.A. Enhancing LpCMFD Acceleration with Successive Overrelaxation for Neutron Transport Source Iteration. Nucl. Sci. Eng. 2021, 195, 1–12. [Google Scholar] [CrossRef]
- Liu, B.; Ma, K. Comparison of Elevated Temperature Performance between Domestic Aviation Lubricant and Russian Aviation Lubricant. Synth. Lubr. 2020, 47, 37–39. [Google Scholar] [CrossRef]









| Texture Type | Snakeskin Texture Shape | Geometric Parameter (μm) | Area (μm²) |
|---|---|---|---|
| Ellipse (E) |  | Long axis = 130.3; Short axis = 97.72 | 10,000 |
| Diamond (D) |  | Long diagonal = 163.3; Short diagonal = 122.47 | |
| Hexagon (H) |  | Side length = 62.04 | |
| Triangle (T) |  | Side length = 151.97 |
| Dynamic Simulation Data (Appendix A) | PV Value | Friction Simulation Settings | |||
|---|---|---|---|---|---|
| Pressure (MPa) | Rotation Speed (rpm) | Rotor Radius (mm) | (MPa·m/s) | Velocity (m/s) | Pressure (MPa) |
| 0.29 | 6000 | 40 | 7.28 | 1 | 7.28 |
| Calculation Parameters | Value (Range) |
|---|---|
| Rotor radius/R, (mm) | 40 |
| Rotation speed/ω, (rpm) | 3000~30,000 |
| Seal clearance/hc, (μm) | 1~20 |
| Pressure difference/pI, (MPa) | 0.1~1.5 |
| Working temperature/T, (°C) | −40~200 |
| Hydrodynamic viscosity/η, (Pa·s) | 0.0002~0.2732 |
| Cavitation pressure/pc, (MPa) | 0 |
| Texture forms | Diamond, Ellipse, and Hexagon |
| Texture area ratio/S | 25% |
| Texture depth/ht, (μm) | 5 |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2022 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Chen, L.; Zhang, Y.; Cui, Y.; Wang, J.; Wang, M. Effects of Snake-Bioinspired Surface Texture on the Finger-Sealing Performance under Varied Working Conditions. Machines 2022, 10, 569. https://doi.org/10.3390/machines10070569
Chen L, Zhang Y, Cui Y, Wang J, Wang M. Effects of Snake-Bioinspired Surface Texture on the Finger-Sealing Performance under Varied Working Conditions. Machines. 2022; 10(7):569. https://doi.org/10.3390/machines10070569
Chicago/Turabian StyleChen, Lingping, Yanchao Zhang, Yahui Cui, Jie Wang, and Mingfeng Wang. 2022. "Effects of Snake-Bioinspired Surface Texture on the Finger-Sealing Performance under Varied Working Conditions" Machines 10, no. 7: 569. https://doi.org/10.3390/machines10070569
APA StyleChen, L., Zhang, Y., Cui, Y., Wang, J., & Wang, M. (2022). Effects of Snake-Bioinspired Surface Texture on the Finger-Sealing Performance under Varied Working Conditions. Machines, 10(7), 569. https://doi.org/10.3390/machines10070569