
Virtual Neuromuscular Control for Robotic Ankle Exoskeleton Standing Balance


Abstract
:1. Introduction
2. Proposed Virtual Neuromuscular Control
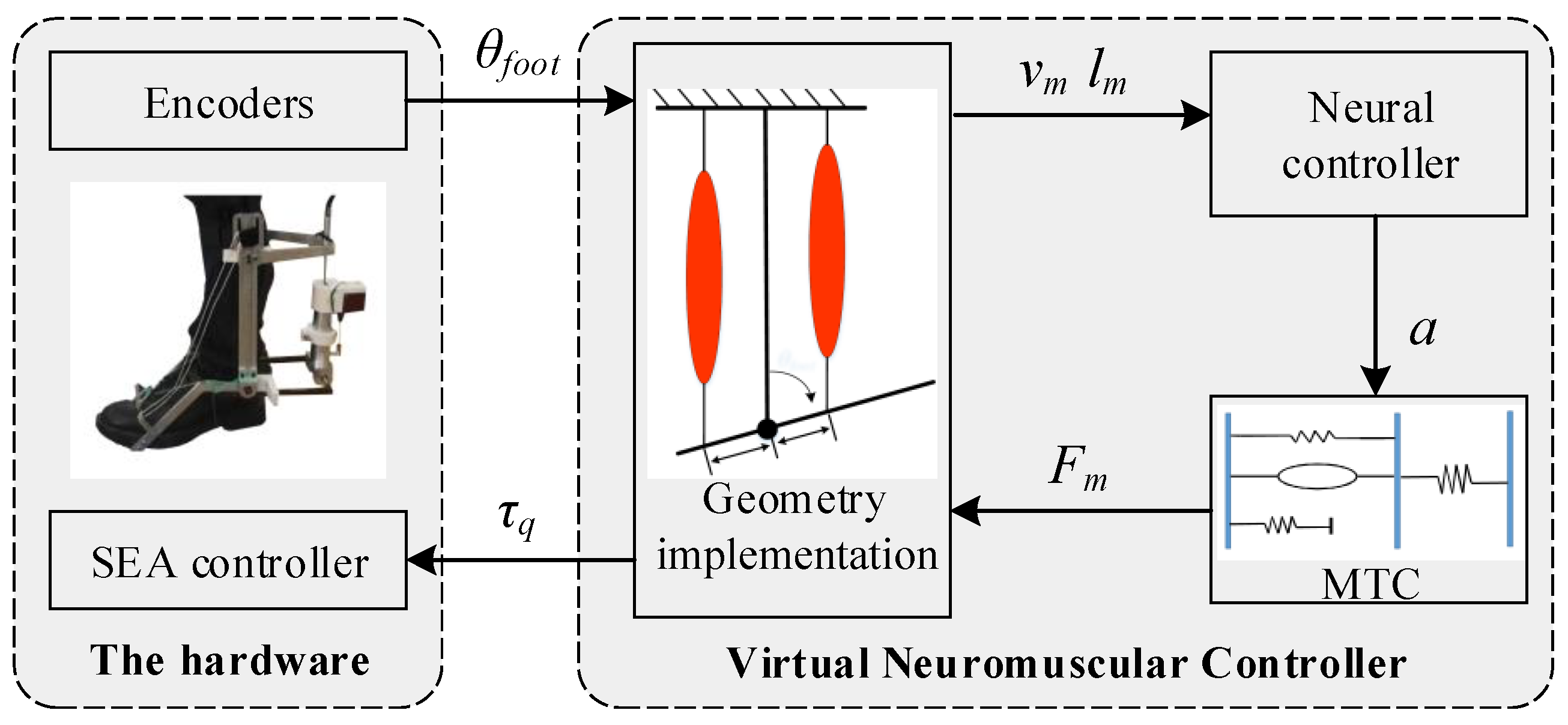
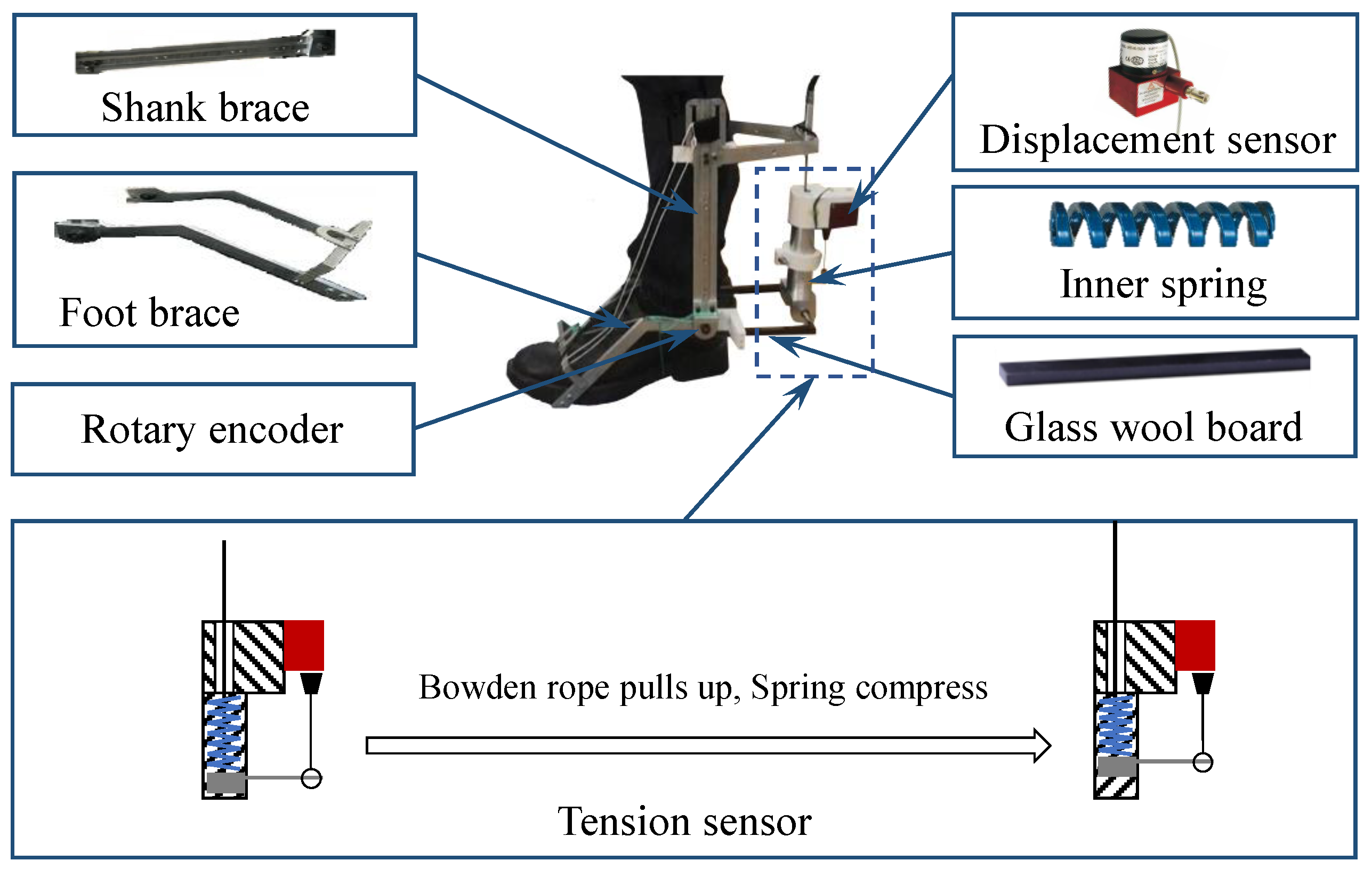
2.1. System Overview
2.2. Musculoskeletal Mechanics
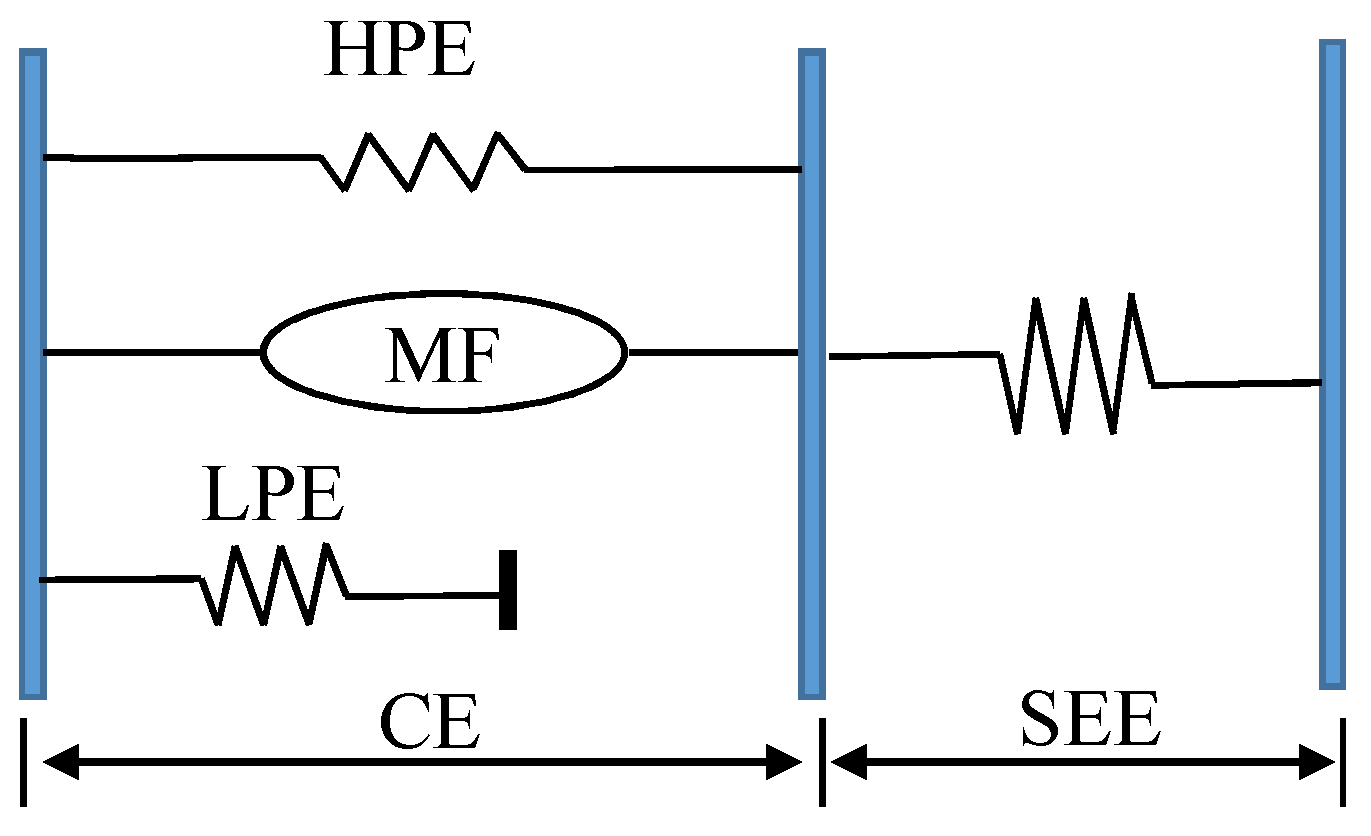
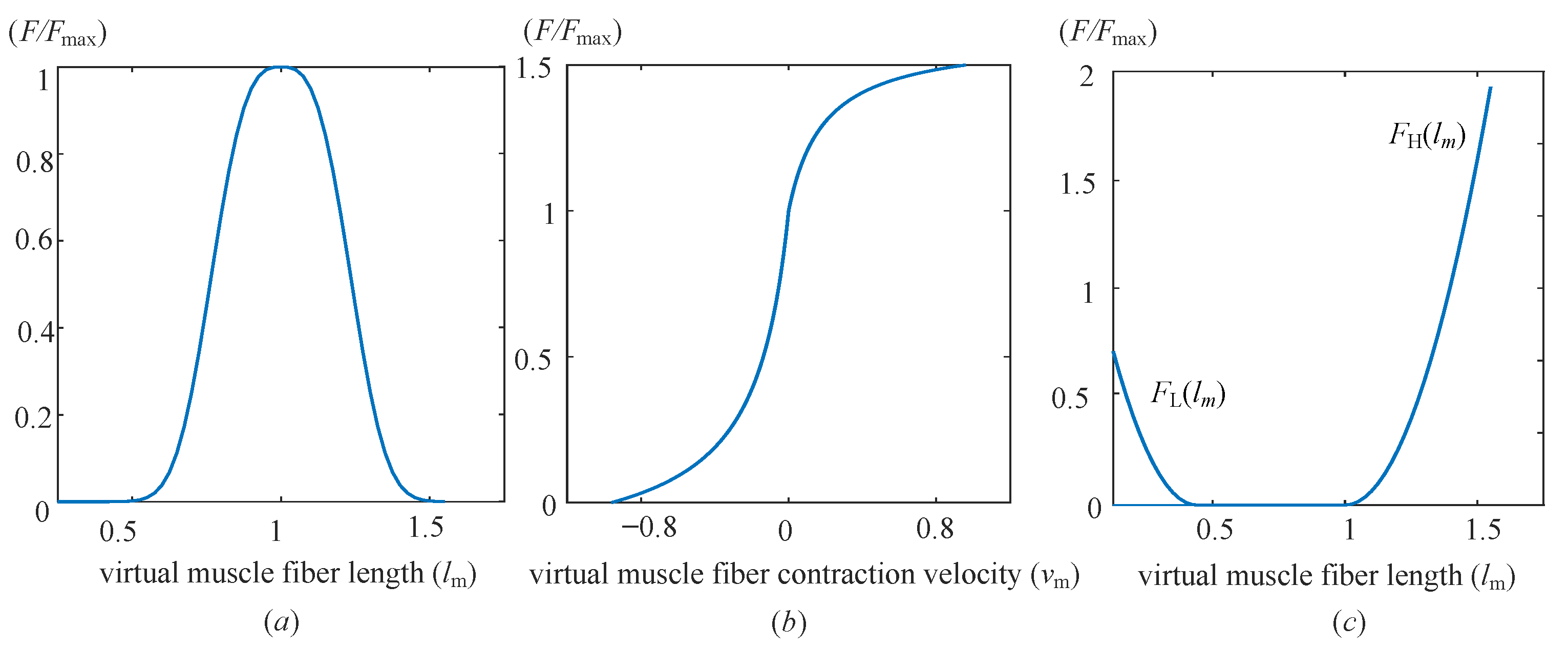
2.2.1. Virtual Muscle Mechanical Model
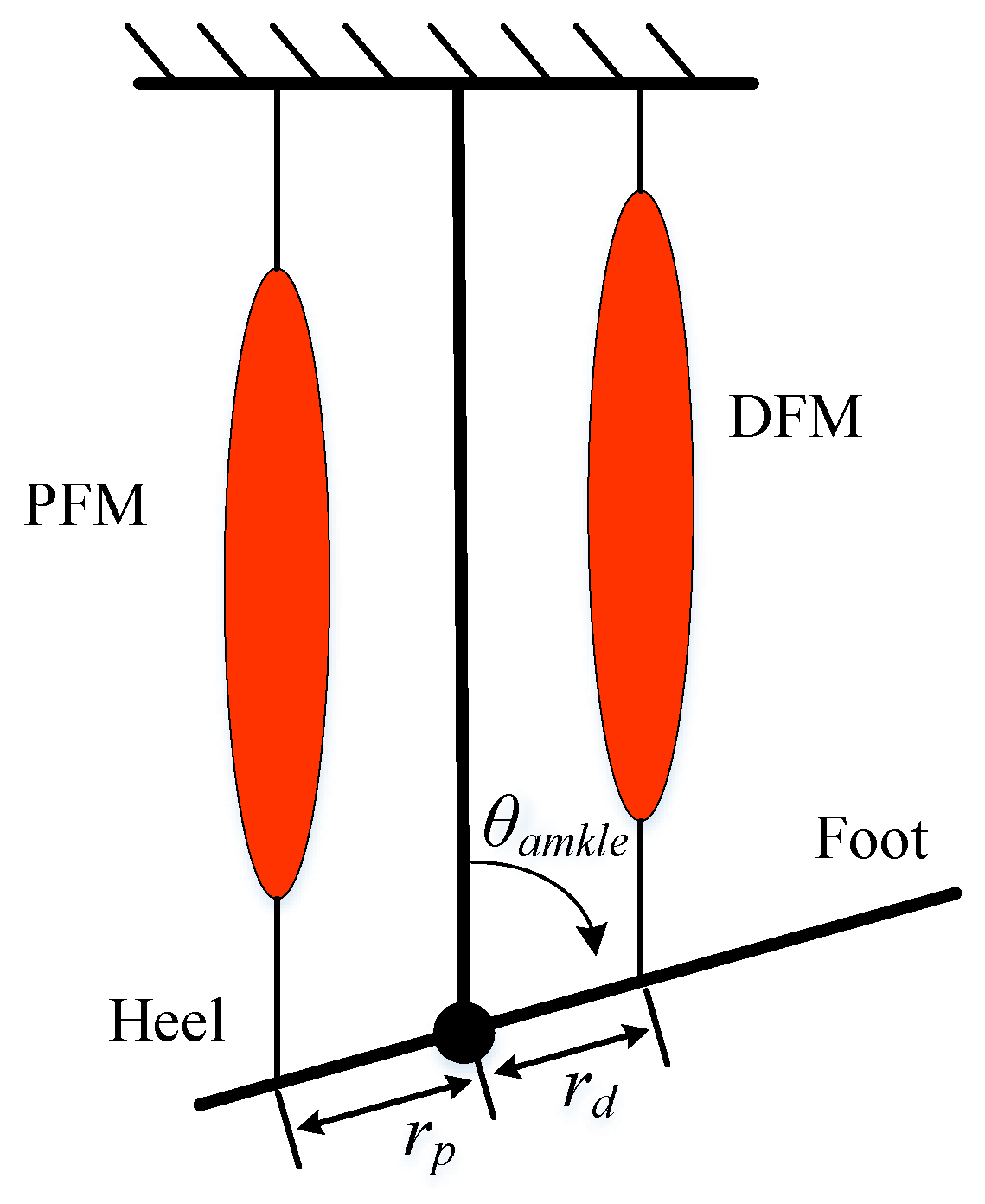
2.2.2. Geometry Implementation
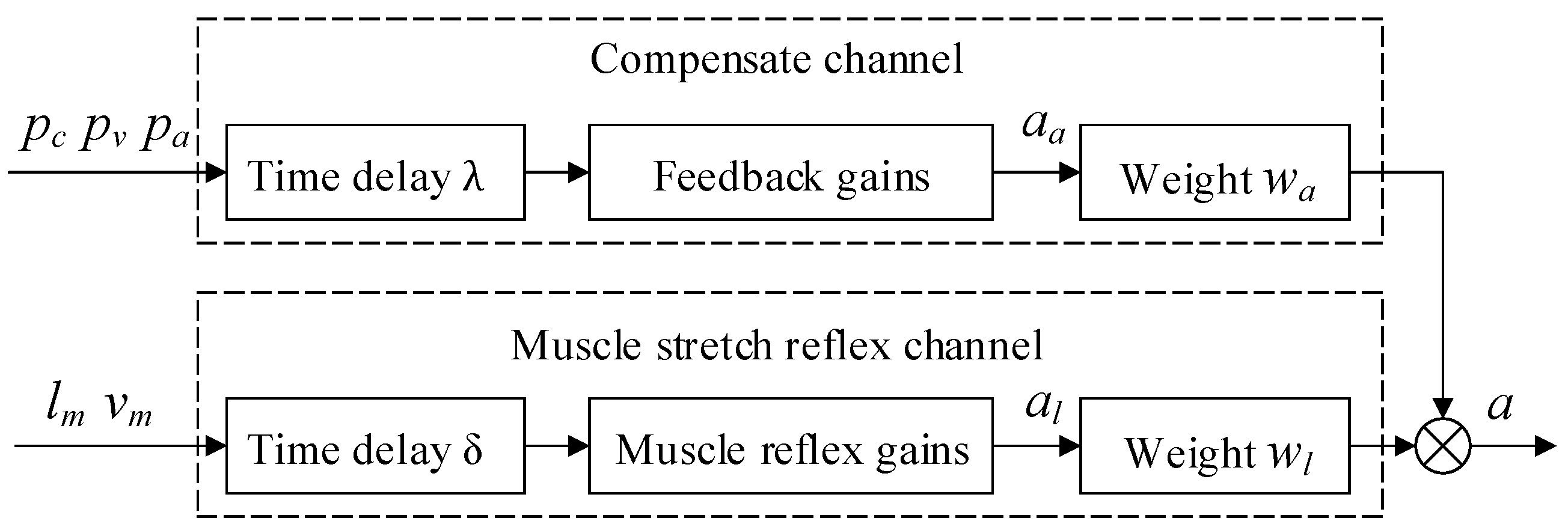
2.3. Neural Controller
3. Experimentation
3.1. Experiment Condition
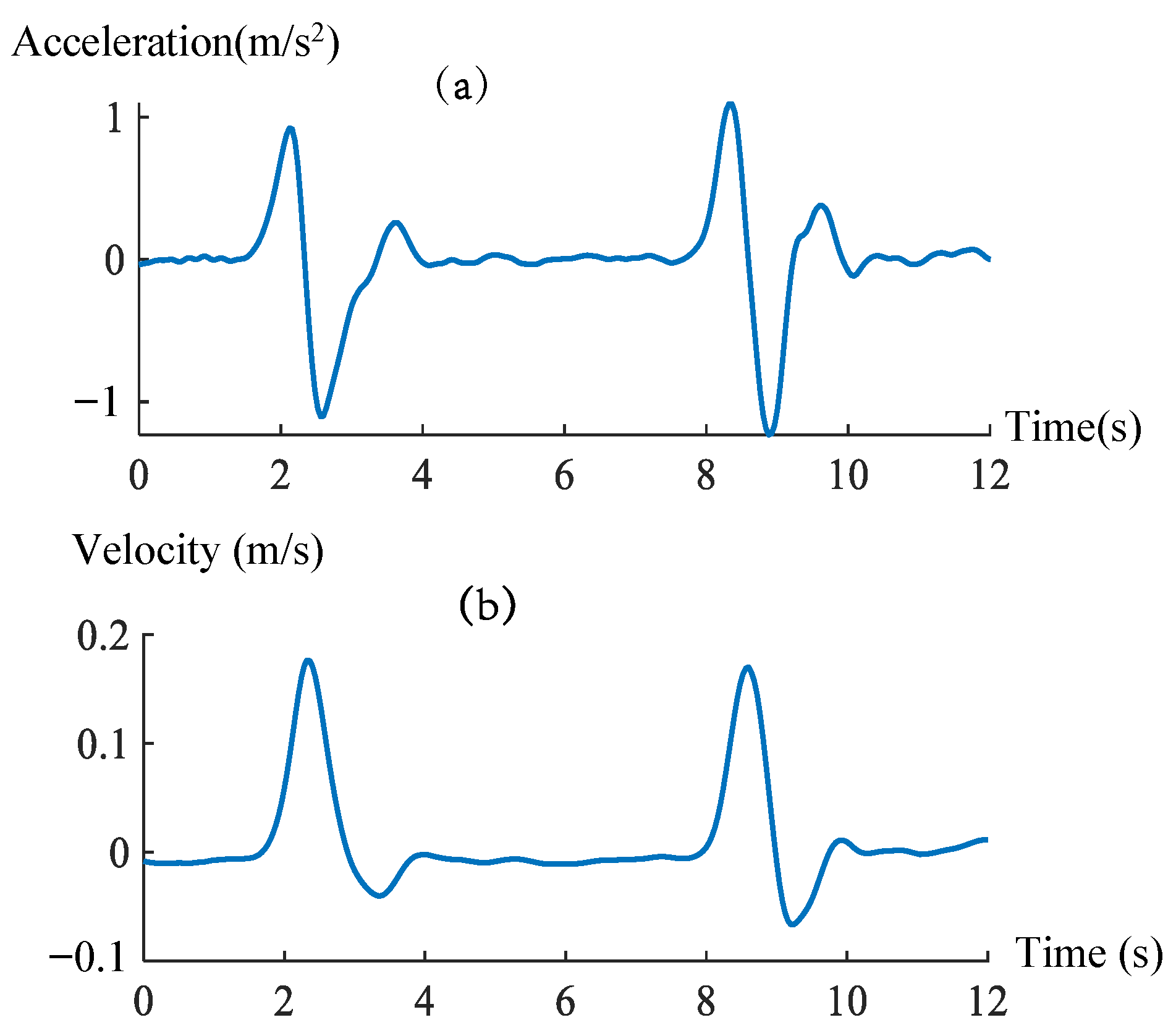
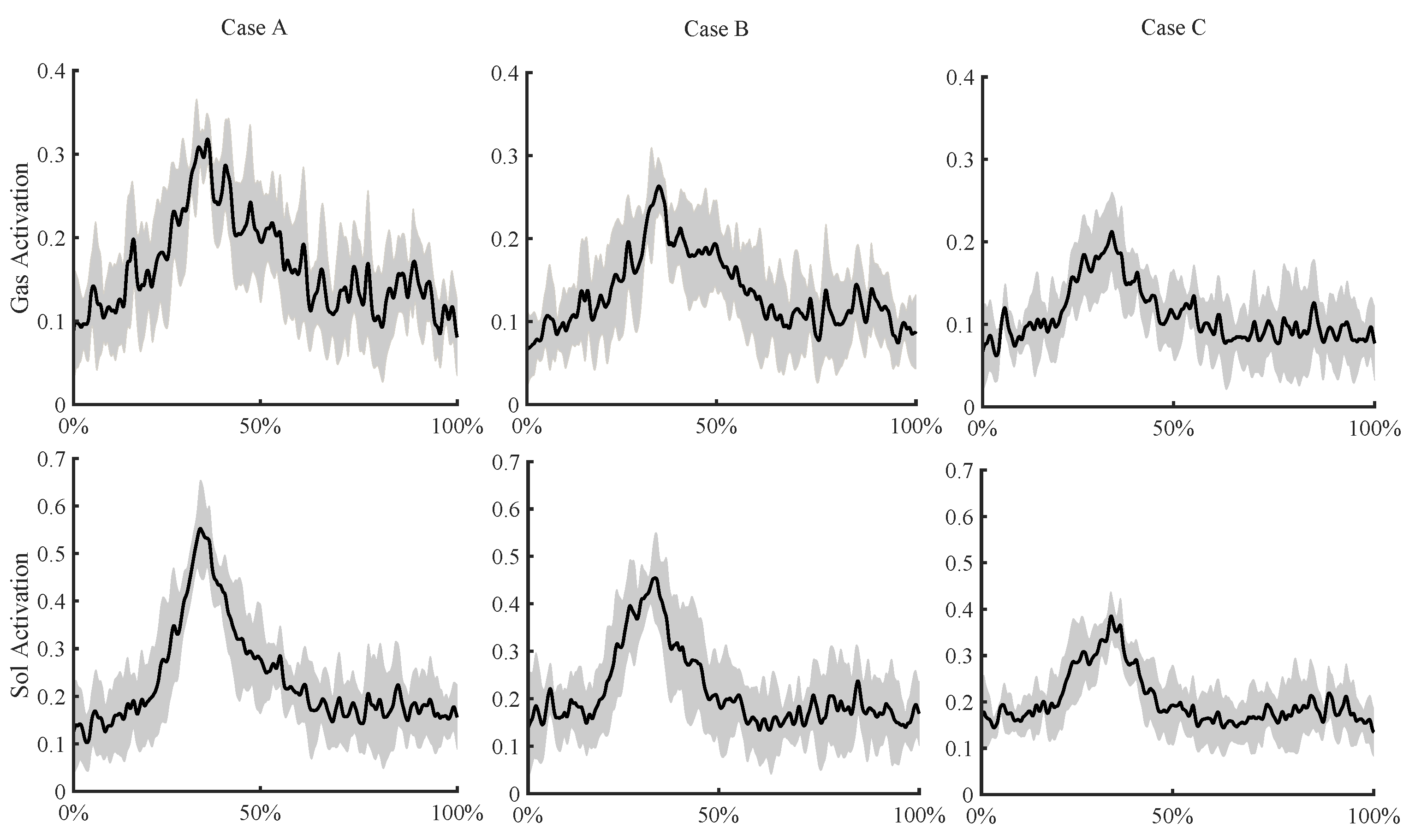
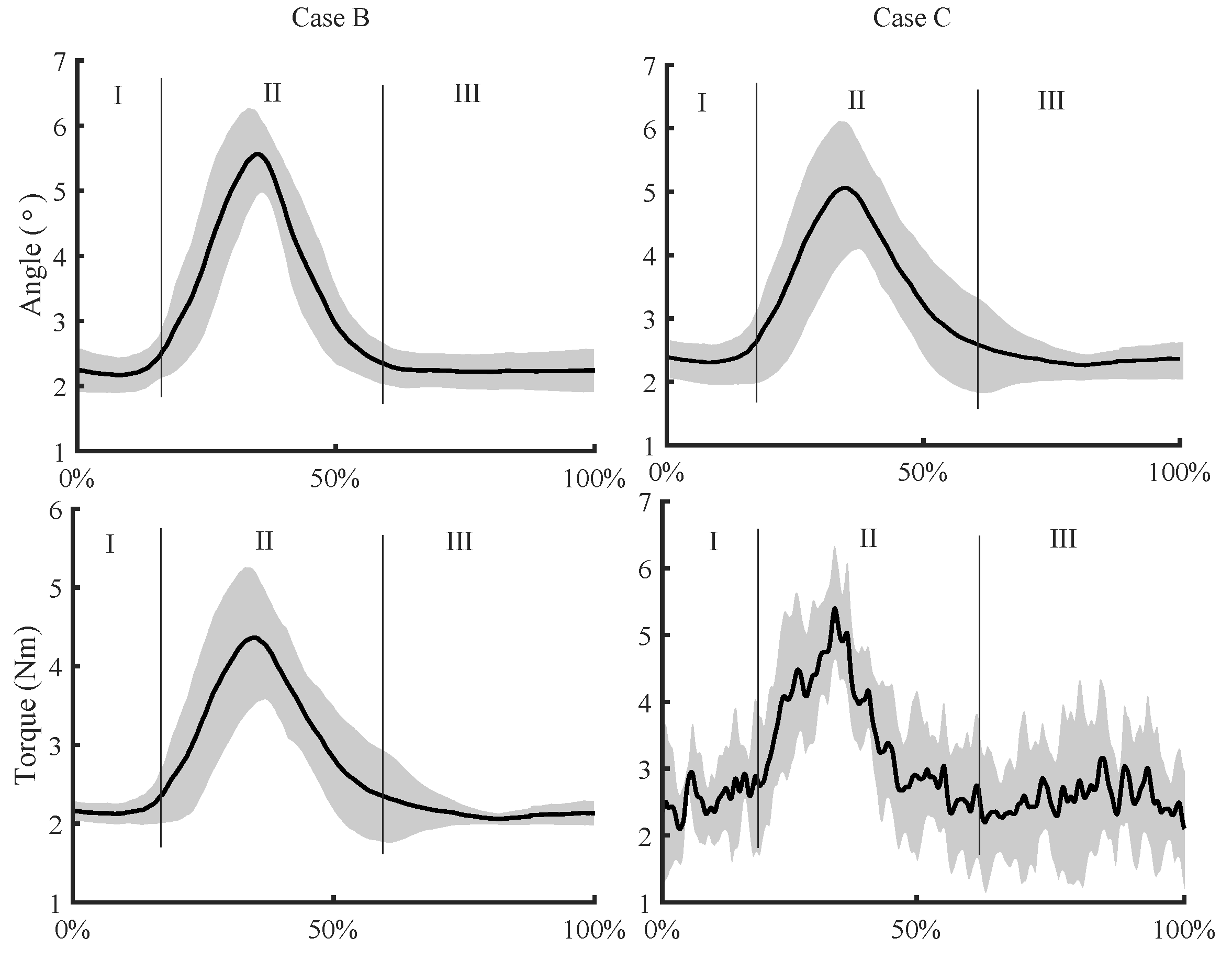
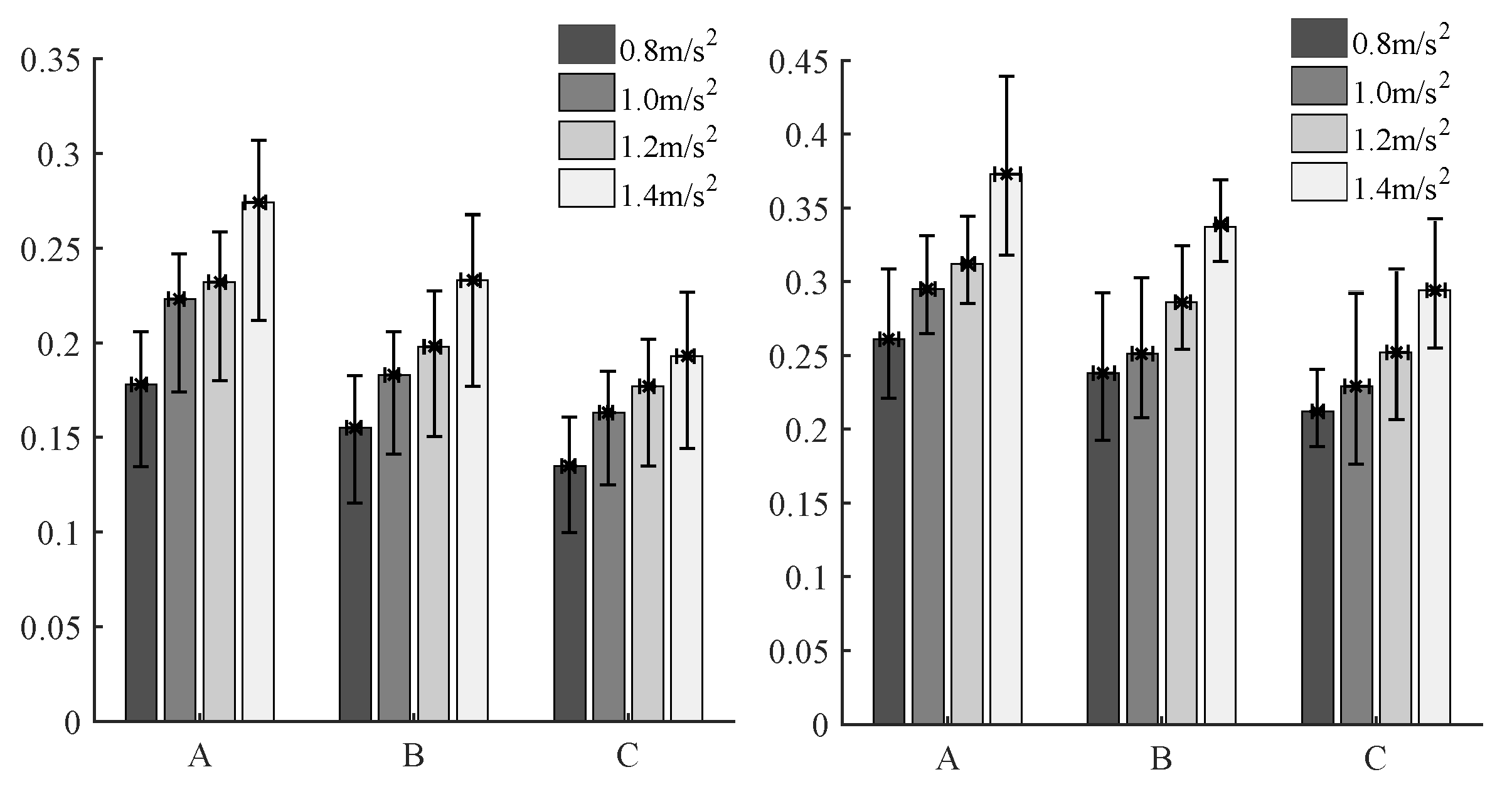
3.2. Experimentation Results
4. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Conflicts of Interest
References
- Hussain, S.; Jamwal, P.K.; Vliet, P.V.; Brown, N.A. Robot assisted ankle neuro-rehabilitation: State of the art and future challenges. Expert Rev. Neurother. 2021, 21, 111–121. [Google Scholar] [CrossRef]
- Baud, R.; Manzoori, A.R.; Ijspeert, A.; Bouri, M. Review of control strategies for lower-limb exoskeletons to assist gait. J. Neuroeng. Rehabil. 2021, 18, 119. [Google Scholar] [CrossRef] [PubMed]
- Kapsalyamov, A.; Jamwal, P.K.; Hussain, S.; Ghayesh, M.H. State of the art lower limb robotic exoskeletons for elderly assistance. IEEE Access 2019, 7, 95075–95086. [Google Scholar] [CrossRef]
- Ishmael, M.K.; Archangeli, D.; Lenzi, T. Powered hip exoskeleton improves walking economy in individuals with above-knee amputation. Nat. Med. 2021, 27, 1783–1788. [Google Scholar] [CrossRef] [PubMed]
- Esquenazi, A.; Talaty, M.; Jayaraman, A. Powered exoskeletons for walking assistance in persons with central nervous system injuries: A narrative review. PM&R 2017, 9, 46–62. [Google Scholar]
- Gatev, P.; Thomas, S.; Kepple, T.; Hallett, M. Feedforward ankle strategy of balance during quiet stance in adults. J. Physiol. 1999, 514, 915–928. [Google Scholar] [CrossRef]
- Han, B.I.; Song, H.S.; Kim, J.S. Vestibular rehabilitation therapy: Review of indications, mechanisms, and key exercises. J. Clin. Neurol. 2011, 7, 184–196. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Bayón, C.; Keemink, A.Q.; van Mierlo, M.; Rampeltshammer, W.; van der Kooij, H.; van Asseldonk, E.H. Cooperative ankle-exoskeleton control can reduce effort to recover balance after unexpected disturbances during walking. J. Neuroeng. Rehabil. 2022, 19, 21. [Google Scholar] [CrossRef]
- Bishe, S.S.P.A.; Nguyen, T.; Fang, Y.; Lerner, Z.F. Adaptive ankle exoskeleton control: Validation across diverse walking conditions. IEEE Trans. Med. Robot. Bionics 2021, 3, 801–812. [Google Scholar] [CrossRef]
- Zhang, J.; Fiers, P.; Witte, K.A.; Jackson, R.W.; Poggensee, K.L.; Atkeson, C.G.; Collins, S.H. Human-in-the-loop optimization of exoskeleton assistance during walking. Science 2017, 356, 1280–1284. [Google Scholar] [CrossRef] [Green Version]
- Zhang, J.; Collins, S.H. The iterative learning gain that optimizes real-time torque tracking for ankle exoskeletons in human walking under gait variations. Front. Neurorobot. 2021, 15, 65. [Google Scholar] [CrossRef] [PubMed]
- Jackson, R.W.; Collins, S.H. Heuristic-based ankle exoskeleton control for co-adaptive assistance of human locomotion. IEEE Trans. Neural Syst. Rehabil. Eng. 2019, 27, 2059–2069. [Google Scholar] [CrossRef] [PubMed]
- Zhang, J.; Cheah, C.C.; Collins, S.H. Experimental comparison of torque control methods on an ankle exoskeleton during human walking. In Proceedings of the 2015 IEEE International Conference on Robotics and Automation (ICRA), Seattle, WA, USA, 26–30 May 2015; pp. 5584–5589. [Google Scholar]
- Tang, Z.; Yu, H.; Yang, H.; Zhang, L.; Zhang, L. Effect of velocity and acceleration in joint angle estimation for an emg-based upper-limb exoskeleton control. Comput. Biol. Med. 2022, 141, 105156. [Google Scholar] [CrossRef] [PubMed]
- Yang, G.-Z.; Bellingham, J.; Dupont, P.E.; Fischer, P.; Floridi, L.; Full, R.; Jacobstein, N.; Kumar, V.; McNutt, M.; Merrifield, R.; et al. The grand challenges of science robotics. Sci. Robot. 2018, 3, eaar7650. [Google Scholar] [CrossRef]
- Thatte, N.; Geyer, H. Toward balance recovery with leg prostheses using neuromuscular model control. IEEE Trans. Biomed. Eng. 2015, 63, 904–913. [Google Scholar] [CrossRef]
- Desai, R.; Geyer, H. Muscle-reflex control of robust swing leg placement. In Proceedings of the 2013 IEEE International Conference on Robotics and Automation, Karlsruhe, Germany, 6–10 May 2013; pp. 2169–2174. [Google Scholar]
- Pang, M.; Xu, X.; Tang, B.; Xiang, K.; Ju, Z. Evaluation of calf muscle reflex control in the ‘ankle strategy’ during upright standing push-recovery. Appl. Sci. 2019, 9, 2085. [Google Scholar] [CrossRef] [Green Version]
- Yin, K.; Xiang, K.; Pang, M.; Chen, J.; Anderson, P.; Yang, L. Personalised control of robotic ankle exoskeleton through experience-based adaptive fuzzy inference. IEEE Access 2019, 7, 72221–72233. [Google Scholar] [CrossRef]
- Geyer, H.; Seyfarth, A.; Blickhan, R. Positive force feedback in bouncing gaits? Proc. R. Soc. Lond. B Biol. Sci. 2003, 270, 2173–2183. [Google Scholar] [CrossRef]
- Hill, A.V. The heat of shortening and the dynamic constants of muscle. Proc. R. Soc. Lond. B Biol. Sci. 1938, 126, 136–195. [Google Scholar]
- Yin, K.; Chen, J.; Xiang, K.; Pang, M.; Tang, B.; Li, J.; Yang, L. Artificial human balance control by calf muscle activation modelling. IEEE Access 2020, 8, 86732–86744. [Google Scholar] [CrossRef]
- Takakusaki, K.; Takahashi, M.; Obara, K.; Chiba, R. Neural substrates involved in the control of posture. Adv. Robot. 2017, 31, 2–23. [Google Scholar] [CrossRef]
- Nishikawa, K.; Biewener, A.A.; Aerts, P.; Ahn, A.N.; Chiel, H.J.; Daley, M.A.; Daniel, T.L.; Full, R.J.; Hale, M.E.; Hedrick, T.L.; et al. Neuromechanics: An integrative approach for understanding motor control. Integr. Comp. Biol. 2007, 47, 16–54. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Wei, G.; Wang, H.; Zhao, X.; Lin, R. Hesitant triangular fuzzy information aggregation in multiple attribute decision making. J. Intell. Fuzzy Syst. 2014, 26, 1201–1209. [Google Scholar] [CrossRef]
- Venanzi, M.; Guiver, J.; Kohli, P.; Jennings, N.R. Time-sensitive bayesian information aggregation for crowdsourcing systems. J. Artif. Intell. Res. 2016, 56, 517–545. [Google Scholar] [CrossRef] [Green Version]
- Xu, Z.; Da, Q.-L. An overview of operators for aggregating information. Int. J. Intell. Syst. 2003, 18, 953–969. [Google Scholar] [CrossRef]












{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Sensor | Accuracy | Resolution | Measurement Range |
|---|---|---|---|
| Rotary encoder | 0∼360 | ||
| Displacement sensor | 0.1 mm | 50∼150 mm |
| Parameters | PFM | DFM |
|---|---|---|
| (kg) | 600 | 800 |
| (cm/s) | 36 | 48 |
| (cm) | 6 | 4 |
| 4 | 5 | |
| (deg) | 80 | 110 |
| (deg) | 110 | 80 |
| 0.5 | 0.7 |
| Parameters | PFM | DFM |
|---|---|---|
| 0.1 | 0.1 | |
| 0.05 | 0.05 | |
| 3.1 | 4.2 | |
| 0.11 | 0.16 | |
| 0.15 | 0.12 | |
| 0.08 | 0.06 | |
| 0.03 | 0.04 |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2022 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Yin, K.; Jin, Y.; Du, H.; Xue, Y.; Li, P.; Ma, Z. Virtual Neuromuscular Control for Robotic Ankle Exoskeleton Standing Balance. Machines 2022, 10, 572. https://doi.org/10.3390/machines10070572
Yin K, Jin Y, Du H, Xue Y, Li P, Ma Z. Virtual Neuromuscular Control for Robotic Ankle Exoskeleton Standing Balance. Machines. 2022; 10(7):572. https://doi.org/10.3390/machines10070572
Chicago/Turabian StyleYin, Kaiyang, Yantao Jin, Haojie Du, Yaxu Xue, Pengfei Li, and Zhengsen Ma. 2022. "Virtual Neuromuscular Control for Robotic Ankle Exoskeleton Standing Balance" Machines 10, no. 7: 572. https://doi.org/10.3390/machines10070572
APA StyleYin, K., Jin, Y., Du, H., Xue, Y., Li, P., & Ma, Z. (2022). Virtual Neuromuscular Control for Robotic Ankle Exoskeleton Standing Balance. Machines, 10(7), 572. https://doi.org/10.3390/machines10070572