
Real-Time Detection of Eichhornia crassipes Based on Efficient YOLOV5

 ,
,
Abstract
:1. Introduction
- (1)
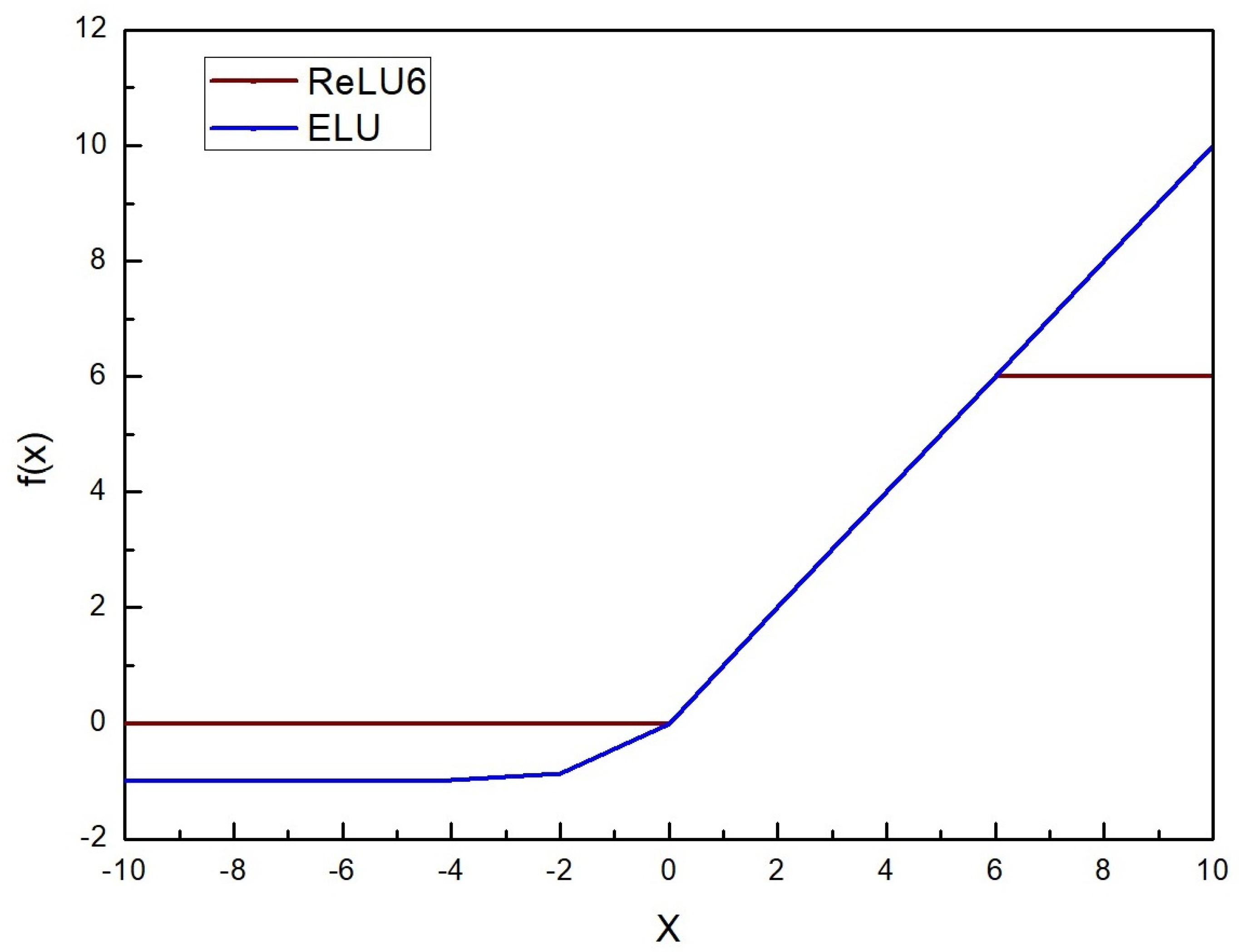
- In the feature extraction network, with EfficientNet-Lite0 as the backbone, the activation function was modified from ReLU6 (rectified linear unit 6) to ELU (exponential linear units), and MaxPool in SPPF (spatial pyramid pooling fast) was modified to SoftPool and embedded into the SA (shuffle attention) attention mechanism module to enhance the local information extraction ability of the algorithm.
- (2)
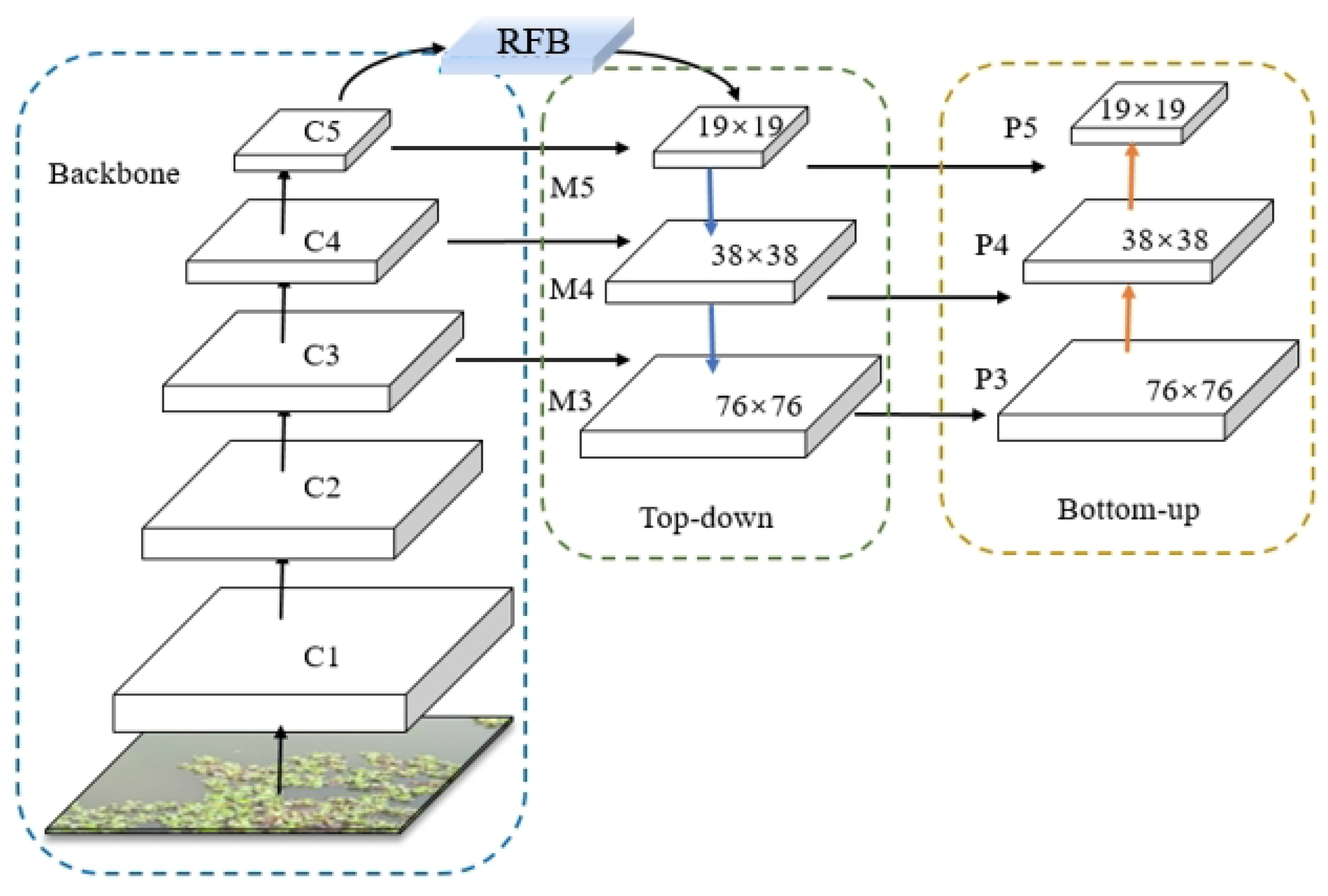
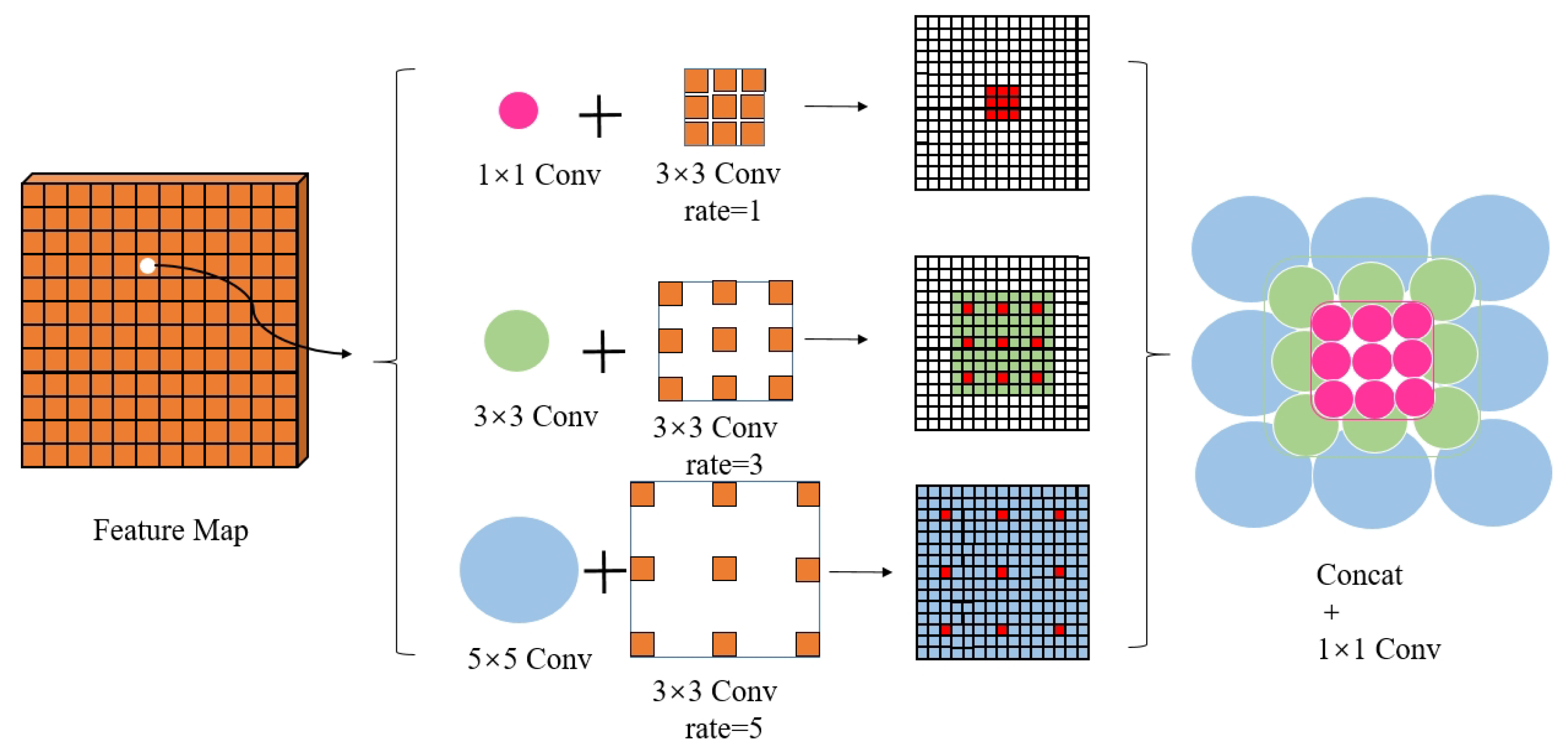
- In the feature fusion network, the original FPN (feature pyramid networks) and PAN (path aggregation network) were used as the baseline models, and the RFB (receptive field block net) module was added to strengthen the extraction ability of network features.
- (3)
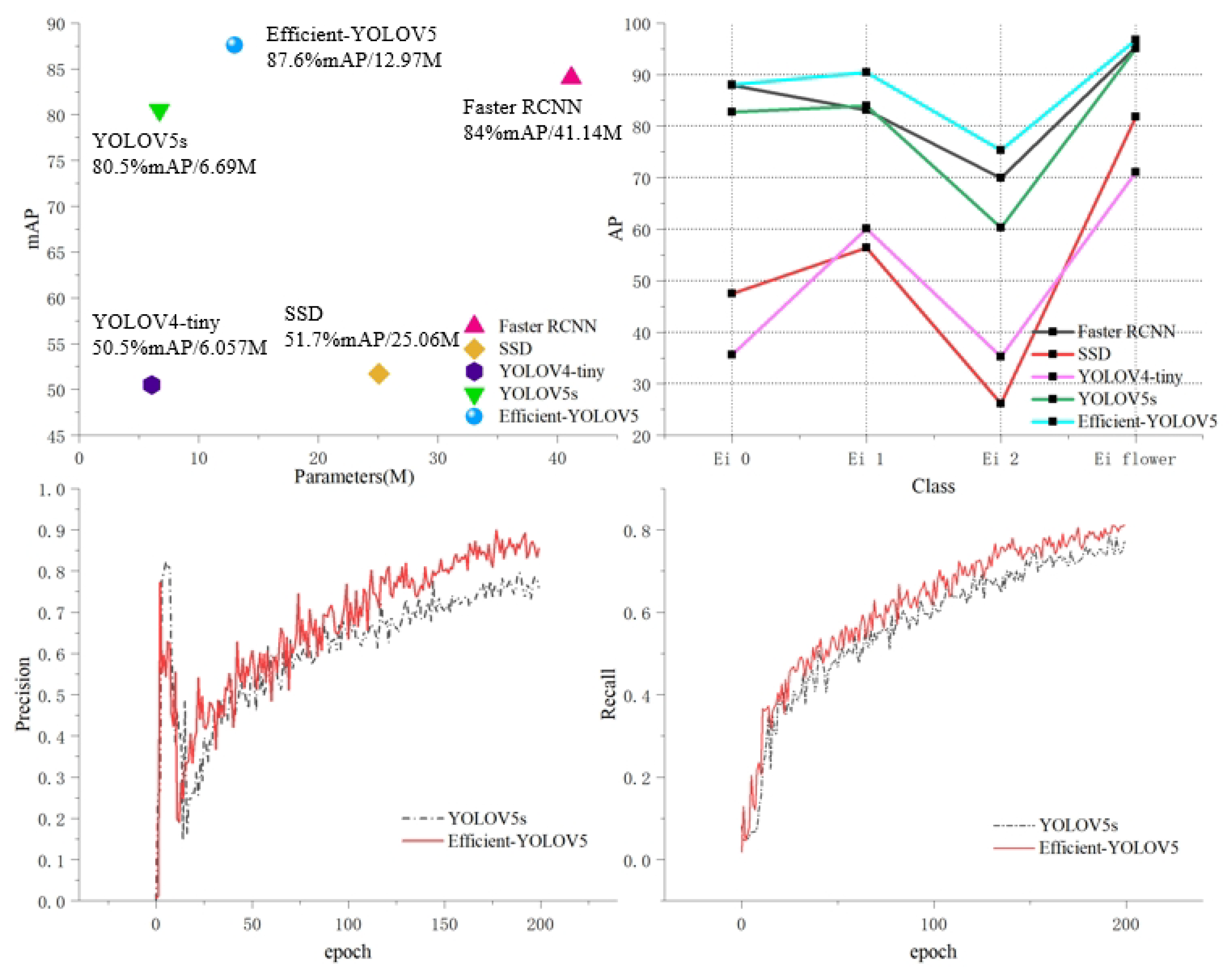
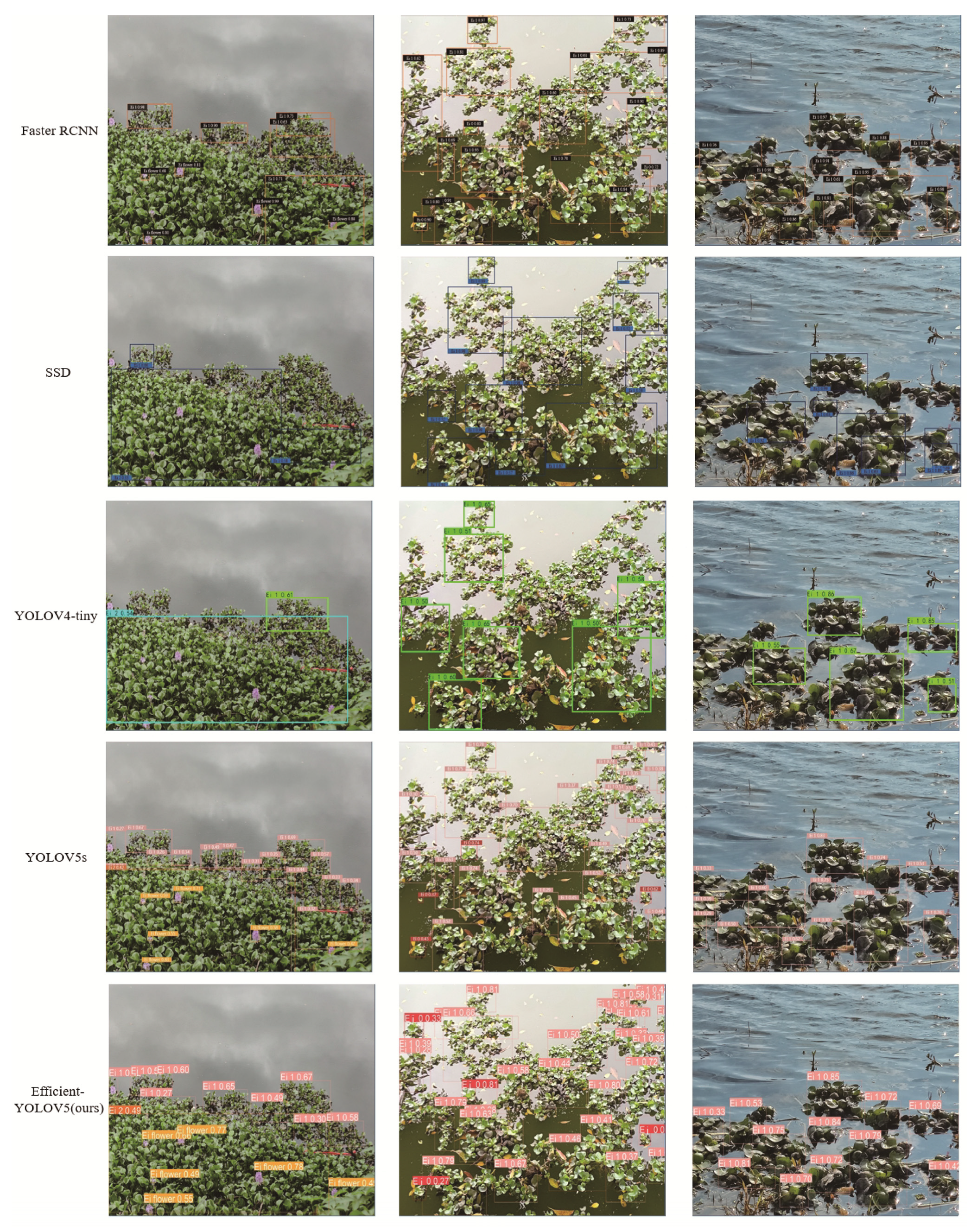
- Efficient YOLOV5 algorithm was proposed for real-time detection. The detection effect of different aggregation forms of Eichhornia crassipes in different environments was better, and the detection accuracy reached 87.6%. Experiments show that efficient YOLOV5 has the best comprehensive performance in terms of accuracy, detection speed, and generalization ability.
2. Methods
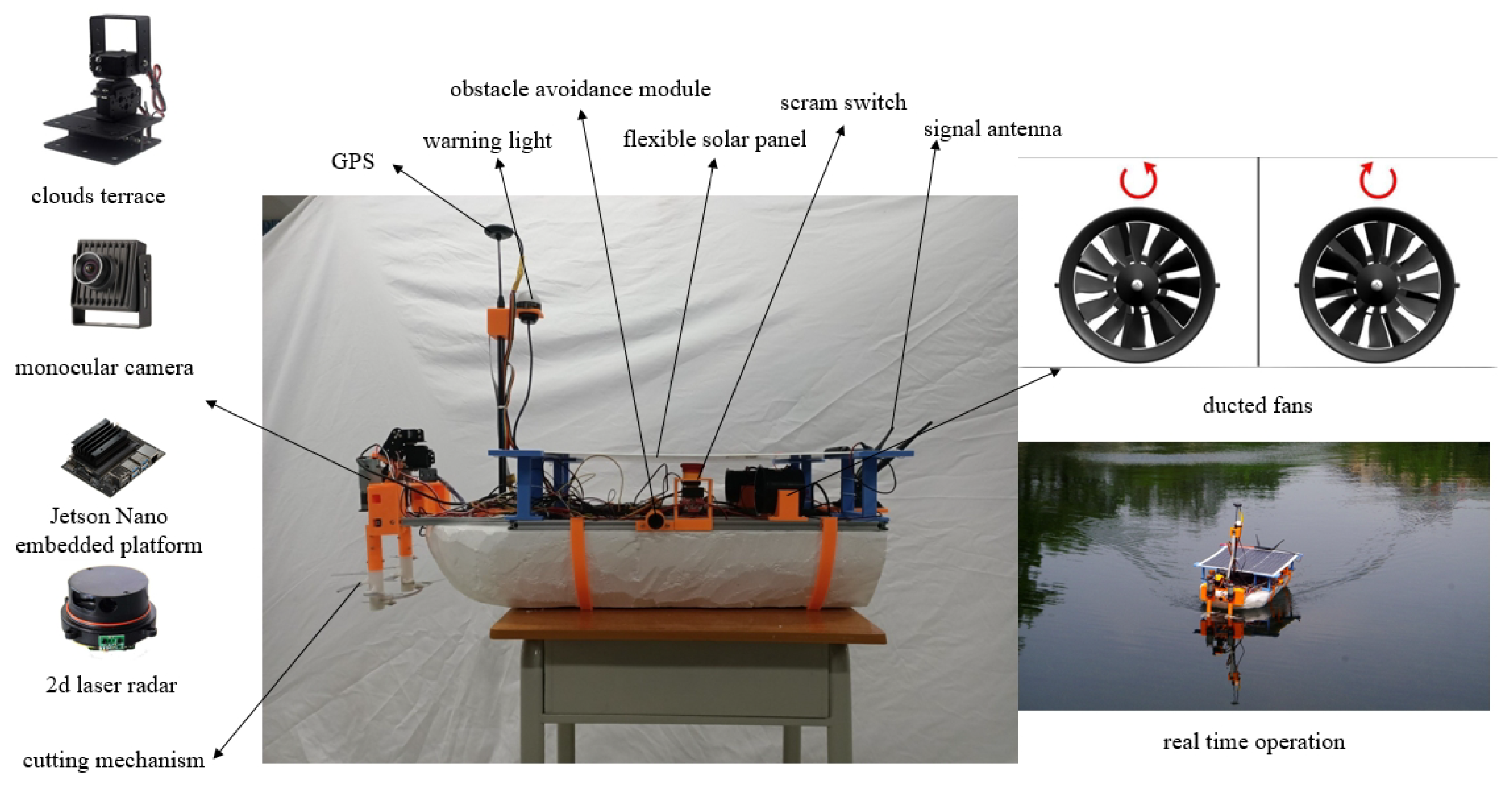
2.1. Introduction of Unmanned Boats
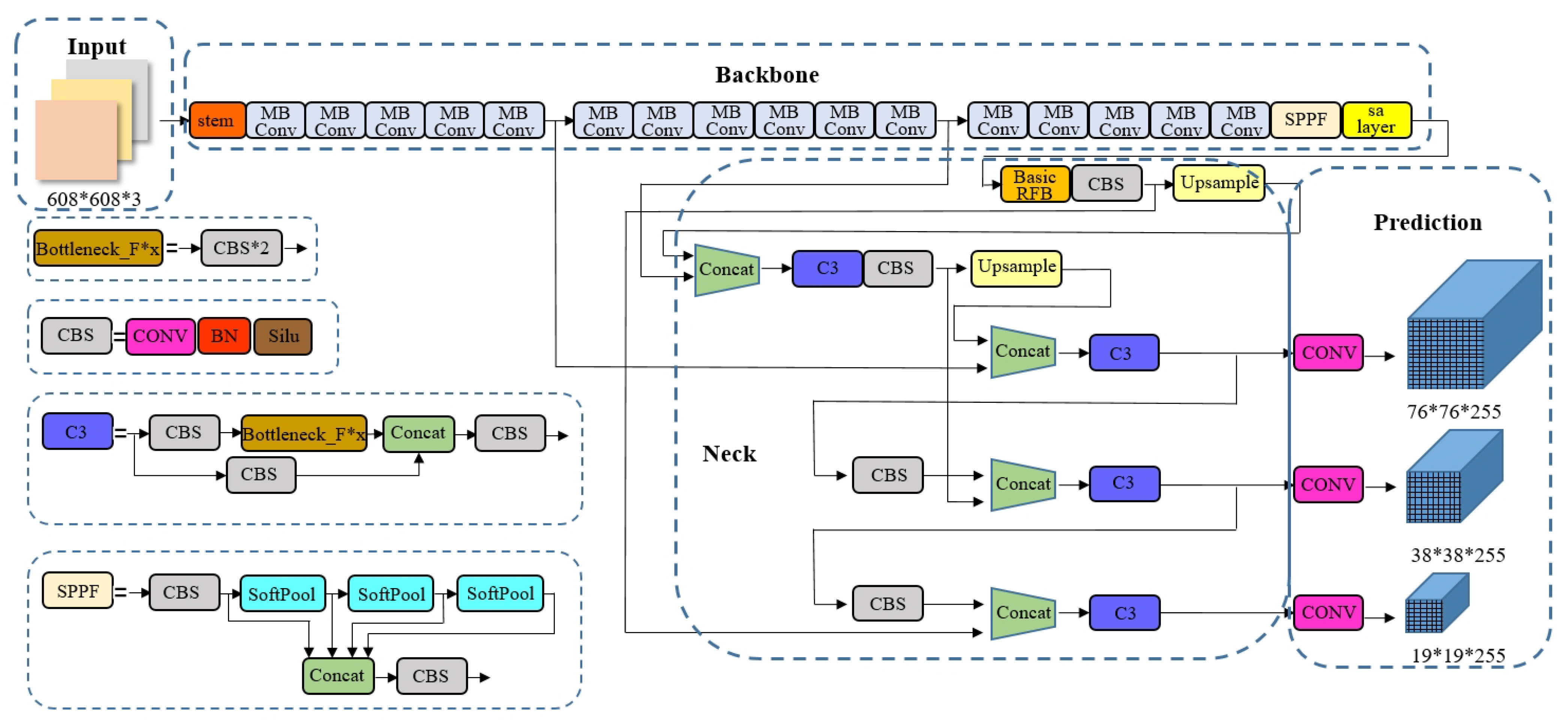
2.2. Overview of the Network Model
2.3. Feature Extraction Network
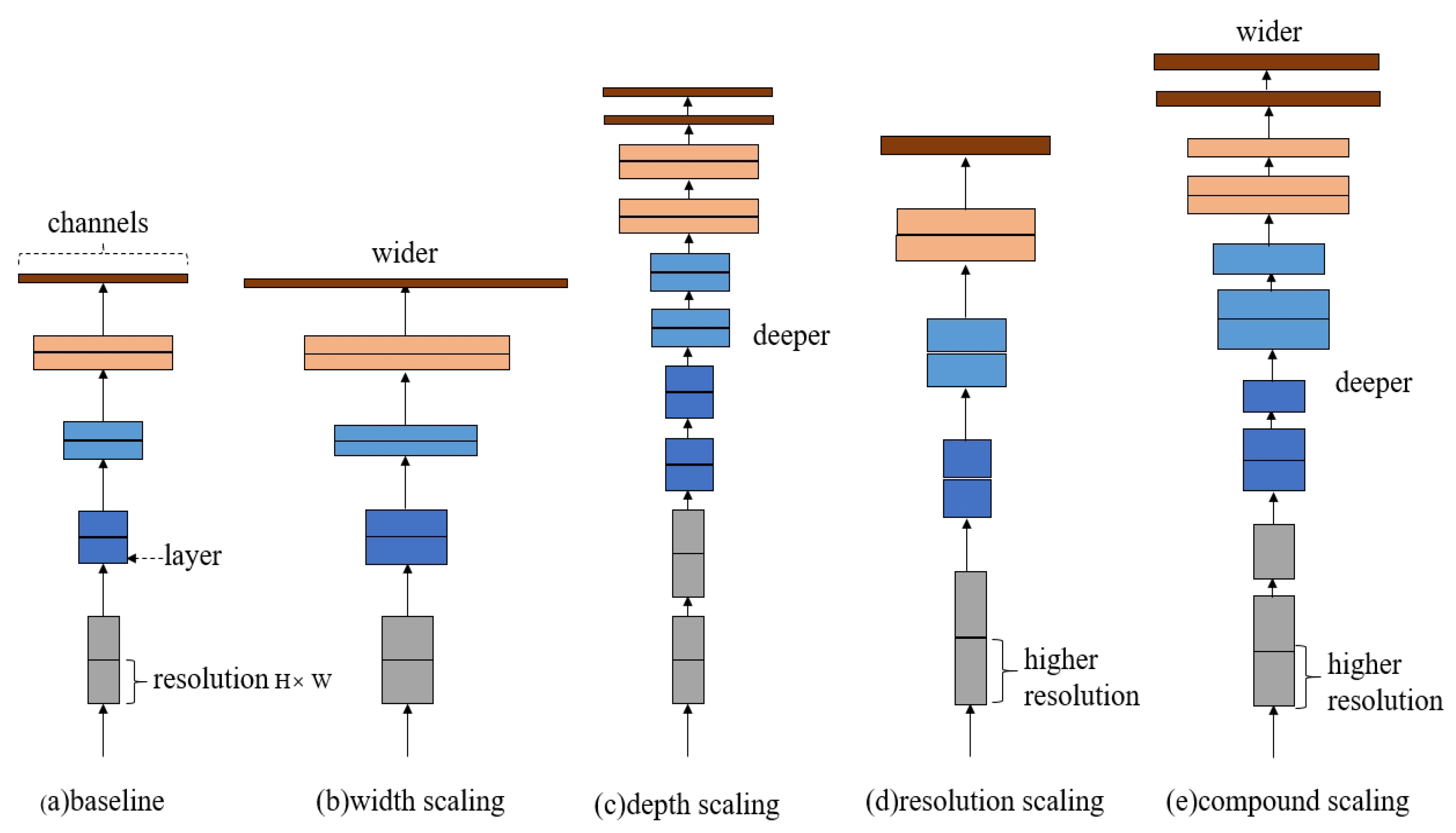
2.3.1. EfficientNet-Lite0
2.3.2. ELU
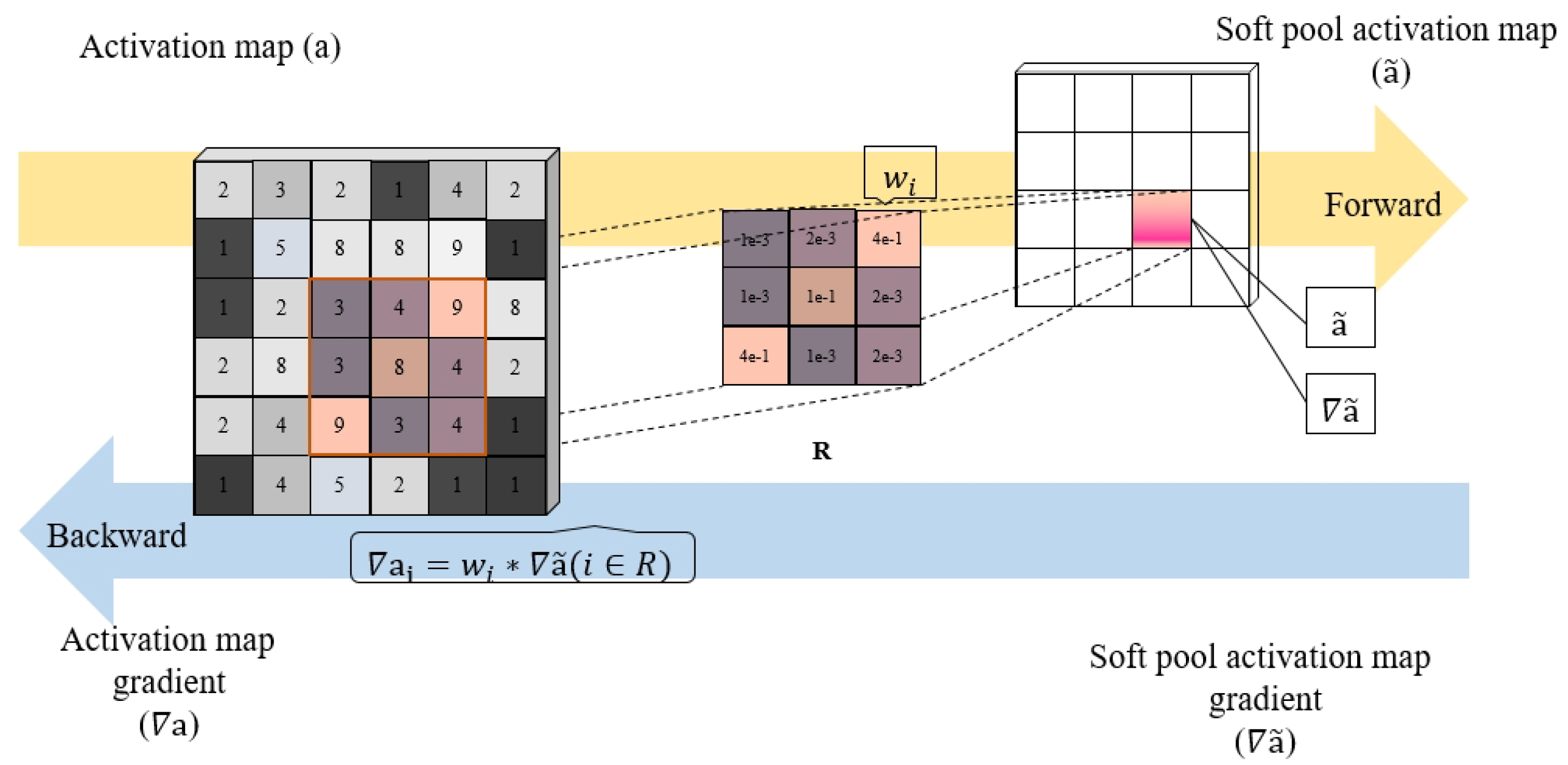
2.3.3. SoftPool
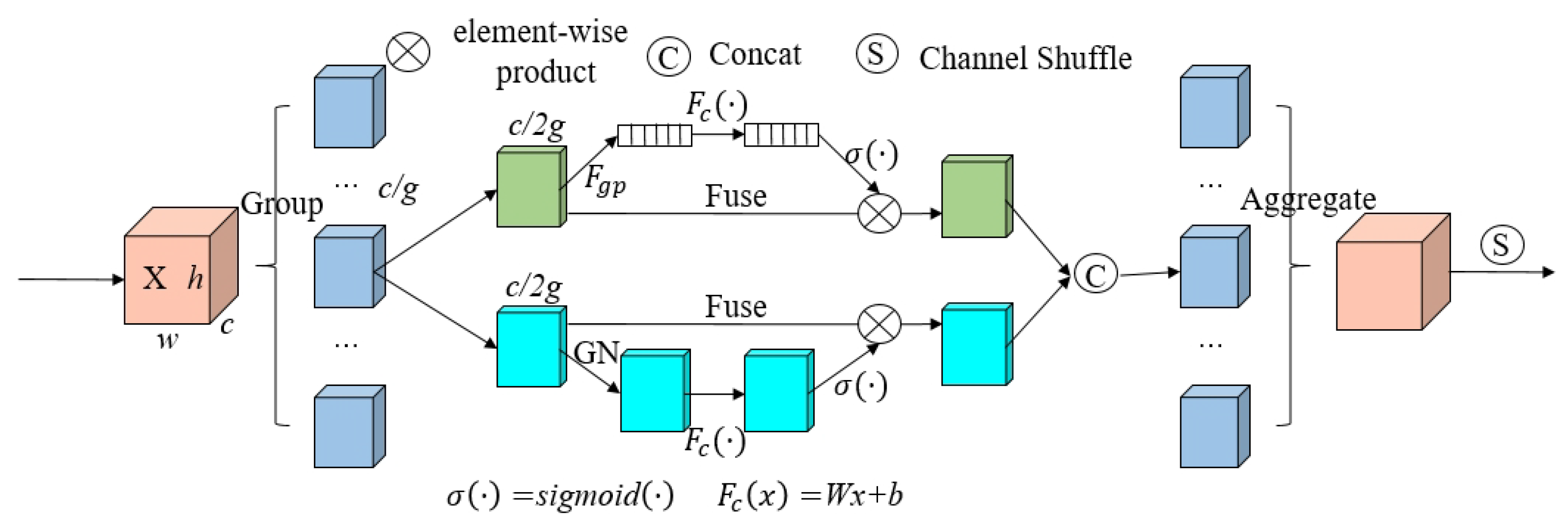
2.3.4. Shuffle Attention
2.4. Feature Fusion Network
3. Experiments and Results
3.1. Implementation Details
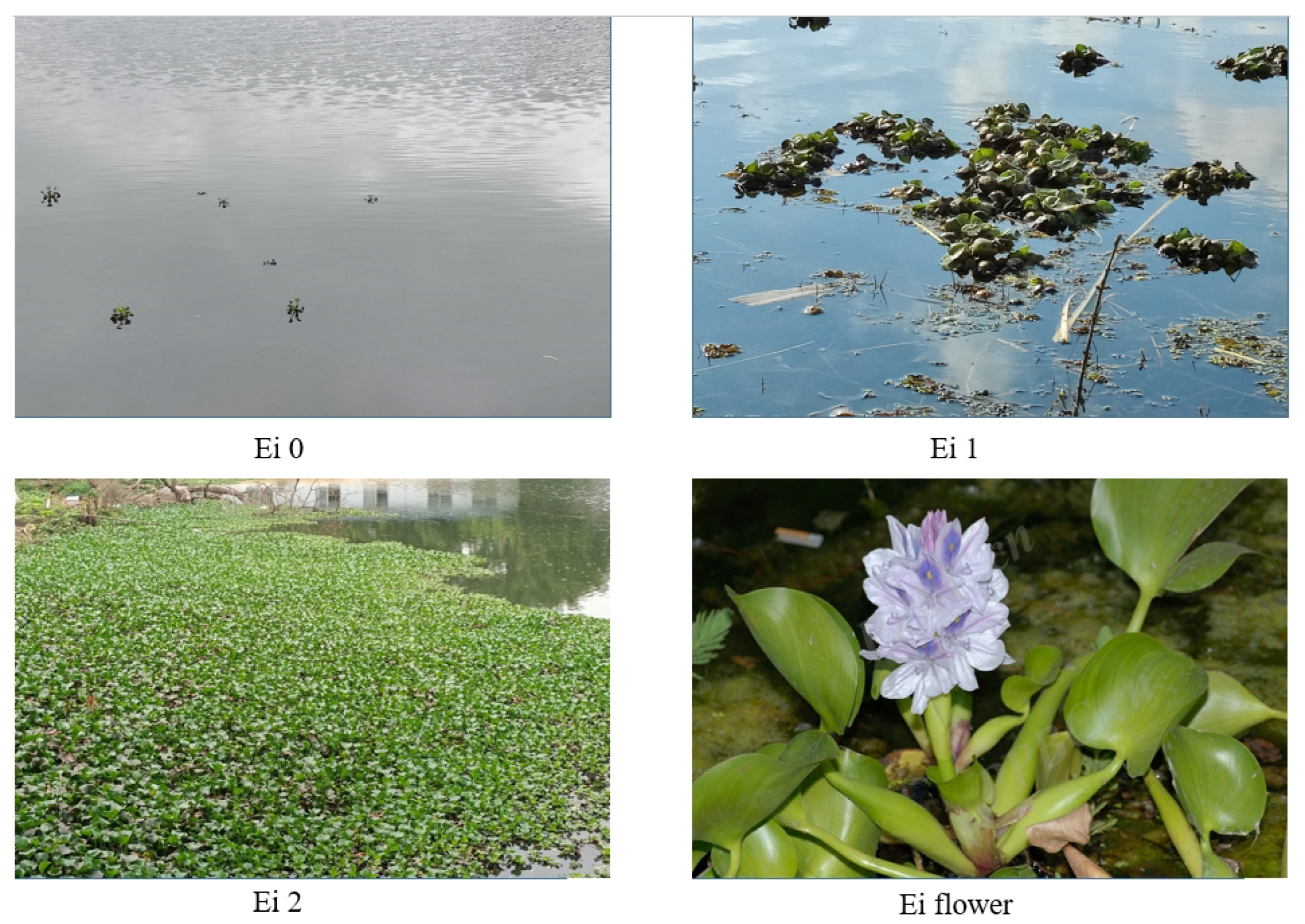
3.1.1. Dataset Production
3.1.2. Training and Inference Details
3.2. Result Comparison
3.3. Ablation Experiment
4. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Conflicts of Interest
References
- Chen, X.; Pan, W.; Wang, M. Spatial distribution characteristics and dynamics of Eichhornia crassipes in the Shuikou Reservoir, Fujian Province. J. Lake Sci. 2012, 24, 391–399. [Google Scholar]
- Wang, Z.; Zhu, P.; Sheng, P.; Zheng, J. Biological characteristics of water hyacinth. Jiangsu J. Agric. Sci. 2011, 27, 531–536. [Google Scholar]
- Merry, M.; Mitan, N. Water hyacinth: Potential and Threat. Mater. Today Proc. 2019, 19, 1408–1412. [Google Scholar] [CrossRef]
- Hill, J.M.; Hutton, B.; Steffins, K.; Rieucau, G. Floating along marsh edges: The impact of invasive water hyacinth (Eichornia crassipes) on estuarine species assemblages and predation risk. J. Exp. Mar. Biol. Ecol. 2021, 544, 151618. [Google Scholar] [CrossRef]
- Gao, L.; Li, B. The study of a specious invasive plant water hyacinth (Eichornia crassipes): Achievements and challenges. Acta Phytoecol. Sin. 2004, 28, 735–752. [Google Scholar]
- Chu, J.J.; Ding, Y.; Zhuang, Q.J. Invasion and control of water hyacinth (Eichhornia crassipes) in China. J. Zhejiang Univ. Sci. B 2006, 7, 623–626. [Google Scholar] [CrossRef]
- Hidayati, N.; Soeprobowati, T.R.; Helmi, M. The evaluation of water hyacinth (Eichhornia crassiper) control program in Rawapening Lake, Central Java Indonesia. IOP Conf. Series. Earth Environ. Sci. 2018, 142, 12016. [Google Scholar] [CrossRef]
- Zhang, L.; Zhu, P.; Gao, Y.; Zhang, Z.; Yan, S. Design of anti-stormy wave enclosures for confined growth of water hyacinth in lakes. Jiangsu J. Agric. Sci. 2013, 29, 1360–1364. [Google Scholar]
- Zhang, Z.; Qin, H.; Liu, H.; Li, X.; Wen, X.; Zhang, Y.; Yan, S. Effect of Large-Scale Confined Growth of Water Hyacinth Improving Water Quality of Relatively Enclosed Eutrophicated Waters in Caohai of Lake Dianchi. J. Ecol. Rural. Environ. 2014, 30, 306–310. [Google Scholar]
- Zheng, B.; Lu, J. Inhibitory effects of harlequin glory-bower (Clerodendrum trichotomum) extract on growth of water hyacinth (Eichhornia crassiper). J. Zhejiang Univ. (Agric. Life Sci.) 2012, 38, 279–287. [Google Scholar] [CrossRef]
- Yan, S.H.; Song, W.; Guo, J.Y. Advances in management and utilization of invasive water hyacinth (Eichhornia crassipes) in aquatic ecosystems-a review. Crit. Rev. Biotechnol. 2017, 37, 218–228. [Google Scholar] [CrossRef]
- Sun, L.; Zhu, Z.S. An Area Growth Model of Eichhornia Crassipes with Application to Lake Ecosystem Restoration. Appl. Mech. Mater. 2014, 496, 3009–3012. [Google Scholar] [CrossRef]
- Zhou, Z.; Li, J.; Wang, Y.; Qiu, J.; Zhang, X.; Zu, C.; Guo, M. Free Growth and Diffusion of Water Hyacinth Based on Logistic-CA and Differential Equations. In Proceedings of the CSAE 2020: 4th International Conference on Computer Science and Application Engineering, Sanya, China, 20–22 October 2020. [Google Scholar] [CrossRef]
- Mukarugwiro, J.A.; Newete, S.W.; Adam, E.; Nsanganwimana, F.; Abutaleb, K.; Byrne, M.J. Mapping spatio-temporal variations in water hyacinth (Eichhornia crassipes) coverage on Rwandan water bodies using multispectral imageries. Int. J. Environ. Sci. Technol. 2021, 18, 275–286. [Google Scholar] [CrossRef]
- Worqlul, A.W.; Ayana, E.K.; Dile, Y.T.; Moges, M.A.; Dersseh, M.G.; Tegegne, G.; Kibret, S. Spatiotemporal Dynamics and Environmental Controlling Factors of the Lake Tana Water Hyacinth in Ethiopia. Remote Sens. 2020, 12, 2706. [Google Scholar] [CrossRef]
- Sun, L.; Zhu, Z. Modelling yield of water hyacinth (Eichhornia crassipes) using satellite and GPS sensors. In Proceedings of the 2017 6th International Conference on Agro-Geoinformatics, Fairfax, VA, USA, 7–10 August 2017. [Google Scholar] [CrossRef]
- Dube, T.; Mutanga, O.; Sibanda, M.; Bangamwabo, V.; Shoko, C. Testing the detection and discrimination potential of the new Landsat 8 satellite data on the challenging water hyacinth (Eichhornia crassipes) in freshwater ecosystems. Appl. Geogr. 2017, 84, 11–22. [Google Scholar] [CrossRef]
- Thamaga, K.H.; Dube, T. Testing two methods for mapping water hyacinth (Eichhornia crassipes) in the Greater Letaba river system, South Africa: Discrimination and mapping potential of the polar-orbiting Sentinel-2 MSI and Landsat 8 OLI sensors. Int. J. Remote. Sens. 2018, 39, 8041–8059. [Google Scholar] [CrossRef]
- Thamaga, K.H.; Dube, T. Remote sensing of invasive water hyacinth (Eichhornia crassipes): A review on applications and challenges. Remote Sens. Appl. Soc. Environ. 2018, 10, 36–46. [Google Scholar] [CrossRef]
- Feng, Z.; Pan, F.; Li, Y. Image recognition based on water hyacinth controlled breeding monitoring equipment. J. Phys. Conf. Ser. 2020, 1549, 32116. [Google Scholar] [CrossRef]
- Ren, S.; He, K.; Girshick, R.; Sun, J. Faster R-CNN: Towards Real-Time Object Detection with Region Proposal Networks. IEEE Trans. Pattern Anal. Mach. Intell. 2017, 39, 1137–1149. [Google Scholar] [CrossRef] [PubMed]
- Redmon, J.; Divvala, S.; Girshick, R.; Farhadi, A. You Only Look Once: Unified, Real-Time Object Detection. In Proceedings of the 2016 IEEE Conference on Computer Vision and Pattern Recognition (CVPR), Las Vegas, NV, USA, 27–30 June 2016; pp. 779–788. [Google Scholar] [CrossRef]
- Redmon, J.; Farhadi, A. YOLOv3: An Incremental Improvement. arXiv 2018, arXiv:1804.02767. [Google Scholar]
- Bochkovskiy, A.; Wang, C.; Liao, H. YOLOv4: Optimal Speed and Accuracy of Object Detection. arXiv 2020, arXiv:2004.10934. [Google Scholar]
- Du, L.; Chen, W.; Fu, S.; Kong, H.; Li, C.; Pei, Z. Real-time Detection of Vehicle and Traffic Light for Intelligent and Connected Vehicles Based on YOLOv3 Network. In Proceedings of the 5th International Conference on Transportation Information and Safety (ICTIS), Liverpool, UK, 14–17 July 2019. [Google Scholar]
- Kim, J. Vehicle Detection Using Deep Learning Technique in Tunnel Road Environments. Symmetry 2020, 12, 2012. [Google Scholar] [CrossRef]
- Hu, X.; Liu, Y.; Zhao, Z.; Liu, J.; Yang, X.; Sun, C.; Chen, S.; Li, B.; Zhou, C. Real-time detection of uneaten feed pellets in underwater images for aquaculture using an improved YOLO-V4 network. Comput. Electron. Agric. 2021, 185, 106135. [Google Scholar] [CrossRef]
- Zhao, T.; Yi, X.; Zeng, Z.; Feng, T. MobileNet-Yolo based wildlife detection model: A case study in Yunnan Tongbiguan Nature Reserve, China. J. Intell. Fuzzy Syst. 2021, 41, 2171–2181. [Google Scholar] [CrossRef]
- Ge, Y.; Lin, S.; Zhang, Y.; Li, Z.; Cheng, H.; Dong, J.; Shao, S.; Zhang, J.; Qi, X.; Wu, Z. Tracking and Counting of Tomato at Different Growth Period Using an Improving YOLO-Deepsort Network for Inspection Robot. Machines 2022, 10, 489. [Google Scholar] [CrossRef]
- Wang, X.; Zhao, Q.; Jiang, P.; Zheng, Y.; Yuan, L.; Yuan, P. LDS-YOLO: A lightweight small object detection method for dead trees from shelter forest. Comput. Electron. Agric. 2022, 198, 107035. [Google Scholar] [CrossRef]
- Tan, M.; Le, Q.V. EfficientNet: Rethinking Model Scaling for Convolutional Neural Networks. In Proceedings of the 36th International Conference on Machine Learning (ICML), Long Beach, CA, USA, 9–15 June 2019. [Google Scholar]
- Clevert, D.; Unterthiner, T.; Hochreiter, S. Fast and Accurate Deep Network Learning by Exponential Linear Units(ELUs). arXiv 2016, arXiv:1511.07289. [Google Scholar]
- Stergiou, A.; Poppe, R.; Kalliatakis, G. Refining activation downsampling with SoftPool. arXiv 2021, arXiv:2101.00440v1. [Google Scholar]
- Zhang, Q.; Yang, Y. Shuffle Attention for Deep Convolutional Neural Networks. In Proceedings of the ICASSP 2021–2021 IEEE International Conference on Acoustics, Speech and Signal Processing (ICASSP), Toronto, ON, Canada, 13 May 2021; pp. 2235–2239. [Google Scholar] [CrossRef]
- Liu, S.; Huang, D.; Wang, Y. Receptive Field Block Net for Accurate and Fast Object Detection. In Proceedings of the European Conference on Computer Vision (ECCV), Munich, Germany, 8–14 September 2018; pp. 385–400. [Google Scholar]
- Howard, A.; Sandler, M.; Chen, B.; Wang, W.; Chen, L.-C.; Tan, M.; Chu, G.; Vasudevan, V.; Zhu, Y.; Pang, R.; et al. Searching for MobileNetV3. In Proceedings of the 2019 IEEE/CVF International Conference on Computer Vision (ICCV), Seoul, Korea, 27 October–2 November 2019; pp. 1314–1324. [Google Scholar]
- Han, K.; Wang, Y.; Tian, Q.; Guo, J.; Xu, C.; Xu, C. GhostNet: More features from cheap operations. In Proceedings of the IEEE/CVF Conference on Computer Vision and Pattern Recognition (CVPR), Seattle, WA, USA, 14–19 June 2020; pp. 1580–1589. [Google Scholar]
- Ma, N.; Zhang, X.; Zheng, H.-T.; Sun, J. ShuffleNet V2: Practical Guidelines for Efficient CNN Architecture Design. In Proceedings of the European Conference on Computer Vision (ECCV), Munich, Germany, 8–14 September 2018; pp. 116–131. [Google Scholar] [CrossRef] [Green Version]
- Cui, C.; Gao, T.; Wei, S.; Du, Y.; Guo, R.; Dong, S.; Lu, B.; Zhou, Y.; Lv, X.; Liu, Q.; et al. PP-LCNet: A Lightweight CPU Convolutional Neural Network. arXiv 2021, arXiv:2109.15099. [Google Scholar]
- Woo, S.; Park, J.; Lee, J.Y.; Kweon, I.S. CBAM: Convolutional block attention module. arXiv 2018, arXiv:1807.06521. [Google Scholar]
- Hou, Q.; Zhou, D.; Feng, J. Coordinate Attention for Efficient Mobile Network Design. In Proceedings of the 2021 IEEE/CVF Conference on Computer Vision and Pattern Recognition (CVPR), Nashville, TN, USA, 20–25 June 2021. [Google Scholar]
- Wang, Q.; Wu, B.; Zhu, P.; Li, P.; Zuo, W.; Hu, Q. ECA-Net: Efficient Channel Attention for Deep Convolutional Neural Networks. In Proceedings of the 2020 IEEE/CVF Conference on Computer Vision and Pattern Recognition (CVPR), Seattle, WA, USA, 14–19 June 2020; pp. 11531–11539. [Google Scholar]
- Vaswani, A.; Shazer, N.; Parmar, N.; Uszkoreit, J.; Jones, L.; Gomez, A.N.; Kaiser, L.; Polosukhin, I. Attention Is All You Need. arXiv 2017, arXiv:1706.03762. [Google Scholar]
- Tan, M.; Pang, R.; Le, Q.V. EfficientDet: Scalable and efficient object detection. In Proceedings of the IEEE/CVF Conference on Computer Vision and Pattern Recognition, Seattle, WA, USA, 13–19 June 2020; pp. 10778–10787. [Google Scholar]















{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Model | Depth Multiple | Width Multiple | Params | GFLOPs | mAP@50 | [email protected]:.95 | FPS |
|---|---|---|---|---|---|---|---|
| YOLOV5s | 0.33 | 0.50 | 6.69 M | 15.8 | 0.805 | 0.412 | 92 |
| YOLOV5m | 0.67 | 0.75 | 19.89 M | 48 | 0.836 | 0.505 | 48 |
| Model | mAP@50 | [email protected]:.95 | Params | GFLOPs | FPS | AP50 of Classes | |||
|---|---|---|---|---|---|---|---|---|---|
| Ei 0 | Ei 1 | Ei 2 | Ei Flower | ||||||
| Faster-RCNN | 0.840 | 0.564 | 41.14 M | 193.79 | 7 | 0.879 | 0.831 | 0.699 | 0.953 |
| SSD | 0.517 | 0.276 | 25.06 M | 31 | 40 | 0.475 | 0.564 | 0.261 | 0.818 |
| YOLOV4-tiny | 0.505 | 0.254 | 6.057 M | 6.945 | 131 | 0.356 | 0.601 | 0.352 | 0.710 |
| YOLOV5s | 0.805 | 0.412 | 6.69 M | 15.8 | 92 | 0.827 | 0.839 | 0.603 | 0.951 |
| Efficient YOLOV5 (ours) | 0.876 | 0.495 | 12.97 M | 23.3 | 62 | 0.880 | 0.904 | 0.753 | 0.967 |
| Backbone | mAP@50 | [email protected]:.95 | Params | GFLOPs | FPS | AP50 of Classes | |||
|---|---|---|---|---|---|---|---|---|---|
| Ei 0 | Ei 1 | Ei 2 | Ei Flower | ||||||
| MobileNetv3Small | 0.724 | 0.359 | 12.04 M | 20.6 | 66 | 0.752 | 0.735 | 0.488 | 0.921 |
| GhostNet | 0.793 | 0.405 | 14.32 M | 22.5 | 49 | 0.856 | 0.848 | 0.525 | 0.941 |
| ShuffleNetV2 | 0.717 | 0.35 | 11.86 M | 20.4 | 63 | 0.756 | 0.746 | 0.423 | 0.941 |
| PP-LCNet | 0.676 | 0.323 | 12.07 M | 20.9 | 72 | 0.716 | 0.707 | 0.407 | 0.875 |
| EffientNet-Lite0 (ours) | 0.876 | 0.495 | 12.97 M | 23.3 | 62 | 0.880 | 0.904 | 0.753 | 0.967 |
| Module | mAP@50 | [email protected]:.95 | Params | GFLOPs | FPS | AP50 of Classes | |||
|---|---|---|---|---|---|---|---|---|---|
| Ei 0 | Ei 1 | Ei 2 | Ei Flower | ||||||
| CBAM | 0.872 | 0.493 | 13.05 M | 23.3 | 48 | 0.861 | 0.902 | 0.754 | 0.971 |
| coordinate attention | 0.874 | 0.494 | 13.02 M | 23.2 | 50 | 0.869 | 0.899 | 0.749 | 0.980 |
| Efficient channel attention | 0.875 | 0.497 | 12.97 M | 23.1 | 54 | 0.874 | 0.903 | 0.753 | 0.972 |
| Transformer | 0.856 | 0.495 | 16.35 M | 25.6 | 43 | 0.867 | 0.898 | 0.688 | 0.972 |
| shuffle attention (ours) | 0.876 | 0.495 | 12.97 M | 23.3 | 62 | 0.880 | 0.904 | 0.753 | 0.967 |
| Neck | mAP@50 | [email protected]:.95 | Params | GFLOPs | FPS | AP50 of Classes | |||
|---|---|---|---|---|---|---|---|---|---|
| Ei 0 | Ei 1 | Ei 2 | Ei Flower | ||||||
| FPN, | 0.657 | 0.285 | 7.85 M | 17.2 | 71 | 0.702 | 0.655 | 0.451 | 0.820 |
| FPN, and PAN | 0.870 | 0.492 | 10.24 M | 20.9 | 60 | 0.879 | 0.911 | 0.732 | 0.961 |
| BiFPN | 0.864 | 0.496 | 13.01 M | 23.3 | 63 | 0.885 | 0.901 | 0.701 | 0.968 |
| FPN, PAN, and RFB (ours) | 0.876 | 0.495 | 12.97 M | 23.3 | 62 | 0.880 | 0.904 | 0.753 | 0.967 |
| Method | mAP@50 | [email protected]:.95 | Params | GFLOPs | FPS | AP50 of Classes | |||
|---|---|---|---|---|---|---|---|---|---|
| Ei 0 | Ei 1 | Ei 2 | Ei Flower | ||||||
| W/o ELU | 0.834 | 0.445 | 12.96 M | 23.2 | 63 | 0.85 | 0.86 | 0.734 | 0.894 |
| W/o SoftPool | 0.871 | 0.491 | 12.97 M | 23.2 | 68 | 0.875 | 0.89 | 0.752 | 0.967 |
| W/o SA | 0.874 | 0.495 | 12.96 M | 23.2 | 62 | 0.883 | 0.905 | 0.746 | 0.96 |
| W/o RFB | 0.87 | 0.492 | 10.24 M | 20.9 | 60 | 0.879 | 0.911 | 0.732 | 0.961 |
| (ours) | 0.876 | 0.495 | 12.97 M | 23.3 | 62 | 0.880 | 0.904 | 0.753 | 0.967 |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2022 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Qian, Y.; Miao, Y.; Huang, S.; Qiao, X.; Wang, M.; Li, Y.; Luo, L.; Zhao, X.; Cao, L. Real-Time Detection of Eichhornia crassipes Based on Efficient YOLOV5. Machines 2022, 10, 754. https://doi.org/10.3390/machines10090754
Qian Y, Miao Y, Huang S, Qiao X, Wang M, Li Y, Luo L, Zhao X, Cao L. Real-Time Detection of Eichhornia crassipes Based on Efficient YOLOV5. Machines. 2022; 10(9):754. https://doi.org/10.3390/machines10090754
Chicago/Turabian StyleQian, Yukun, Yalun Miao, Shuqin Huang, Xi Qiao, Minghui Wang, Yanzhou Li, Liuming Luo, Xiyong Zhao, and Long Cao. 2022. "Real-Time Detection of Eichhornia crassipes Based on Efficient YOLOV5" Machines 10, no. 9: 754. https://doi.org/10.3390/machines10090754
APA StyleQian, Y., Miao, Y., Huang, S., Qiao, X., Wang, M., Li, Y., Luo, L., Zhao, X., & Cao, L. (2022). Real-Time Detection of Eichhornia crassipes Based on Efficient YOLOV5. Machines, 10(9), 754. https://doi.org/10.3390/machines10090754