
On-Board Random Vibration-Based Robust Detection of Railway Hollow Worn Wheels under Varying Traveling Speeds †



Abstract
:1. Introduction
- The unsupervised and robust detection of hollow worn wheels under different traveling speeds.
- The detection of hollow worn wheels at an early stage, before the standard hollow wear limit (∼3 mm) is reached and well before wear is evident on the RMS or related characteristics of acceleration signals on the vehicle bogie or carbody.
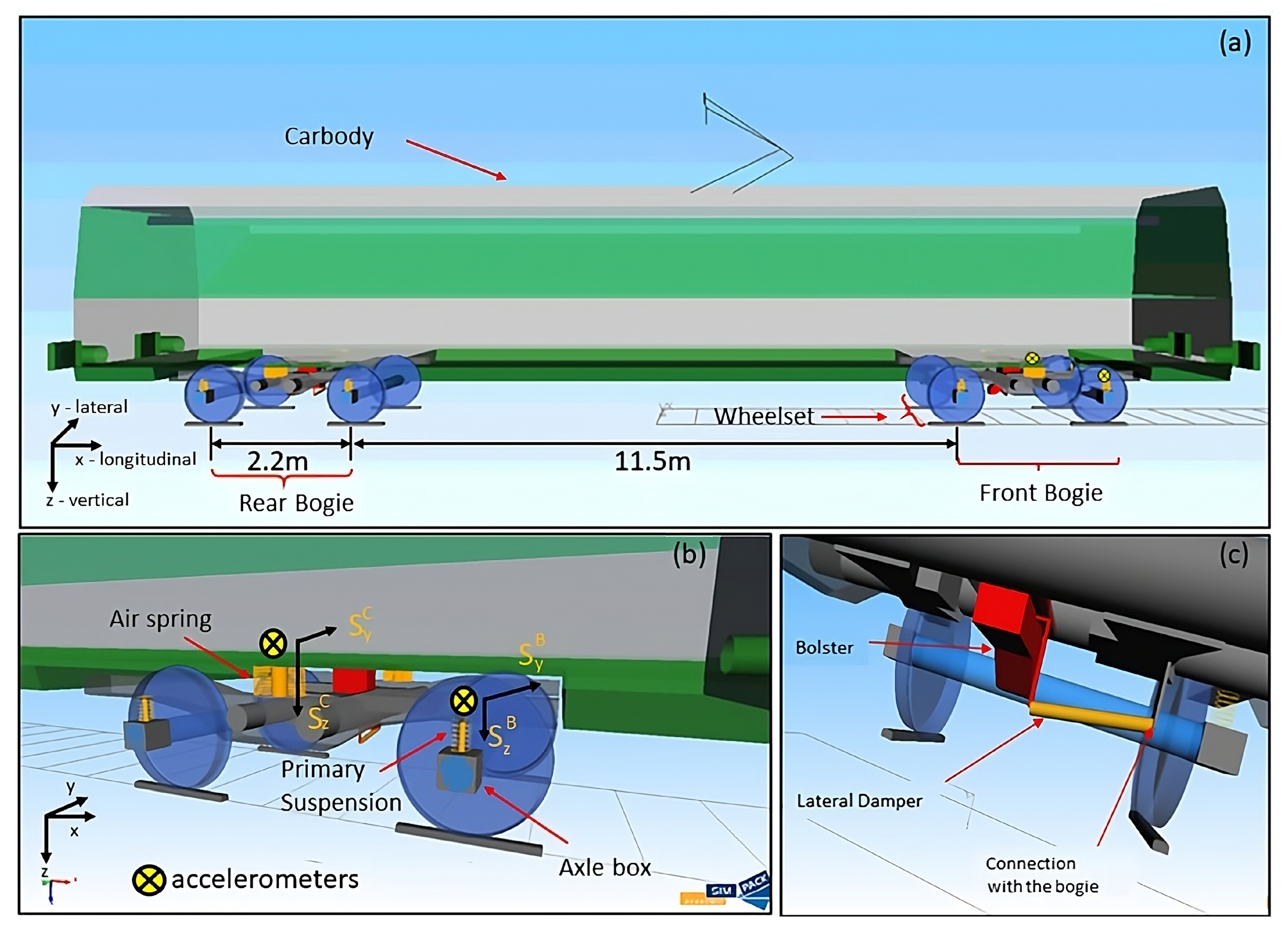
- The detection of hollow wheels using a single accelerometer on the vertical or lateral direction either on the vehicle bogie or carbody, thus keeping instrumentation at an absolutely minimal level.
2. Problem Statement
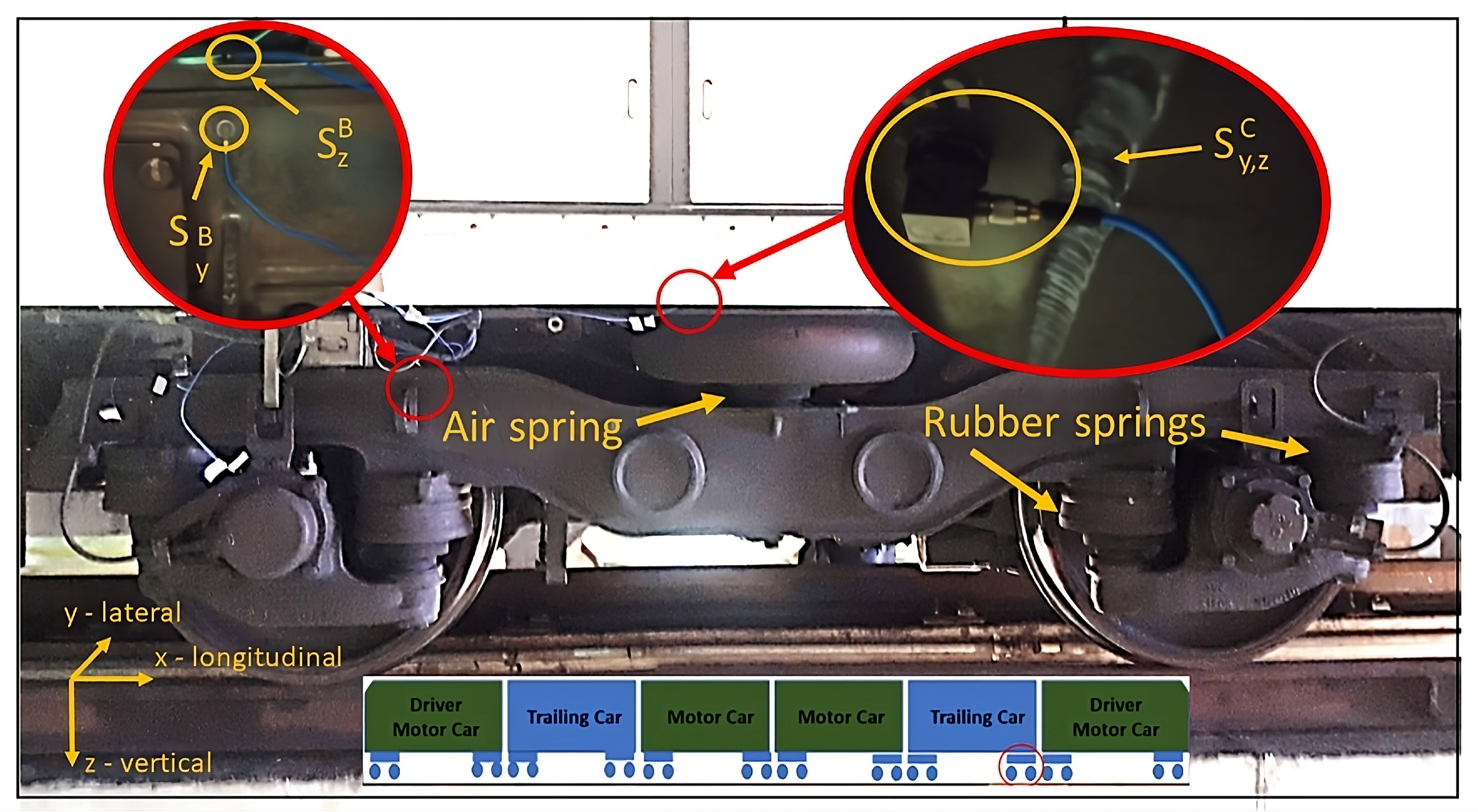
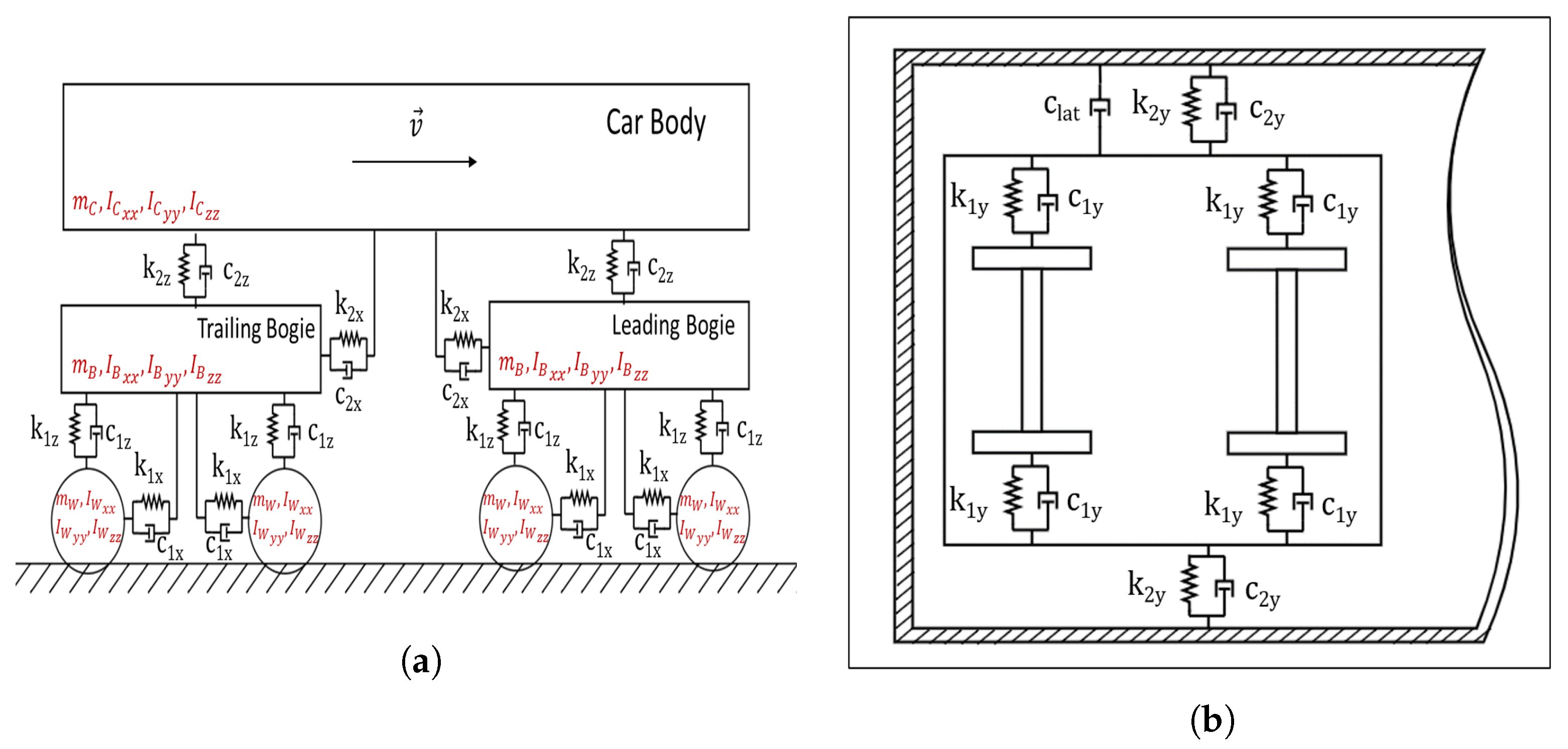
- Baseline phase: Given a number n of random N-sample long lateral and/or vertical vibration response signals (presently accelerations)obtained from the railway vehicle running with distinct constant speeds during normal operation—excluding braking, deceleration or acceleration of the vehicle—over a tangent track with t designating normalization by the sampling period discrete time, the training of the framework is performed. These signals may be acquired from a sensor on the vehicle’s bogie or carbody (see Figure 1a,b) with the vehicle wheels considered under a healthy condition: hollow wear smaller than the selected critical limit.
- Inspection phase: Given a new random vibration signal from any of the above sensors’ location at any traveling speed with the vehicle wheels under an unknown condition (designated by the subscript u), the framework determines whether they are healthy or worn. This binary decision may be expressed via the following hypothesis testing using the distance metric D of either framework’s method (see details in Section 5) that should be under a limit
3. Case Study A: Monte Carlo Simulations with a SIMPACK Multibody Railway Vehicle Model
3.1. The Railway Vehicle Model
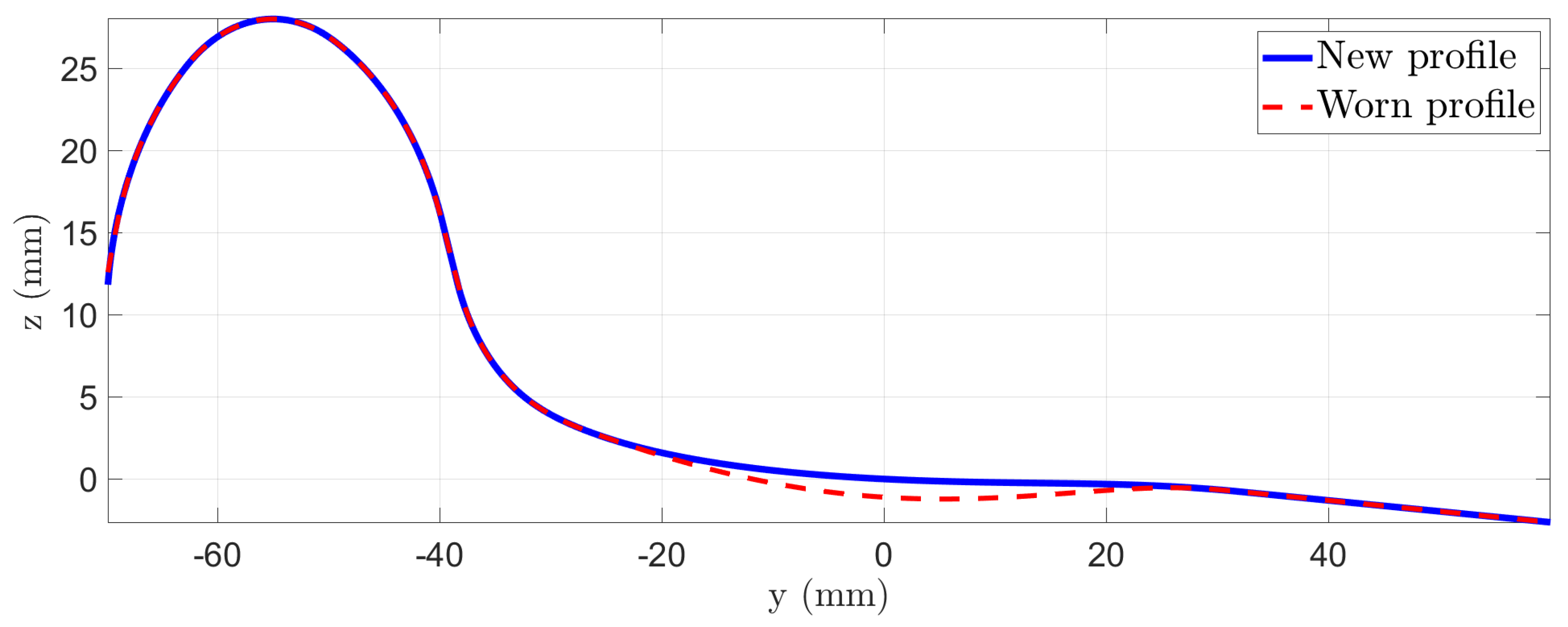
3.2. Hollow Worn Wheels and Monte Carlo Simulations
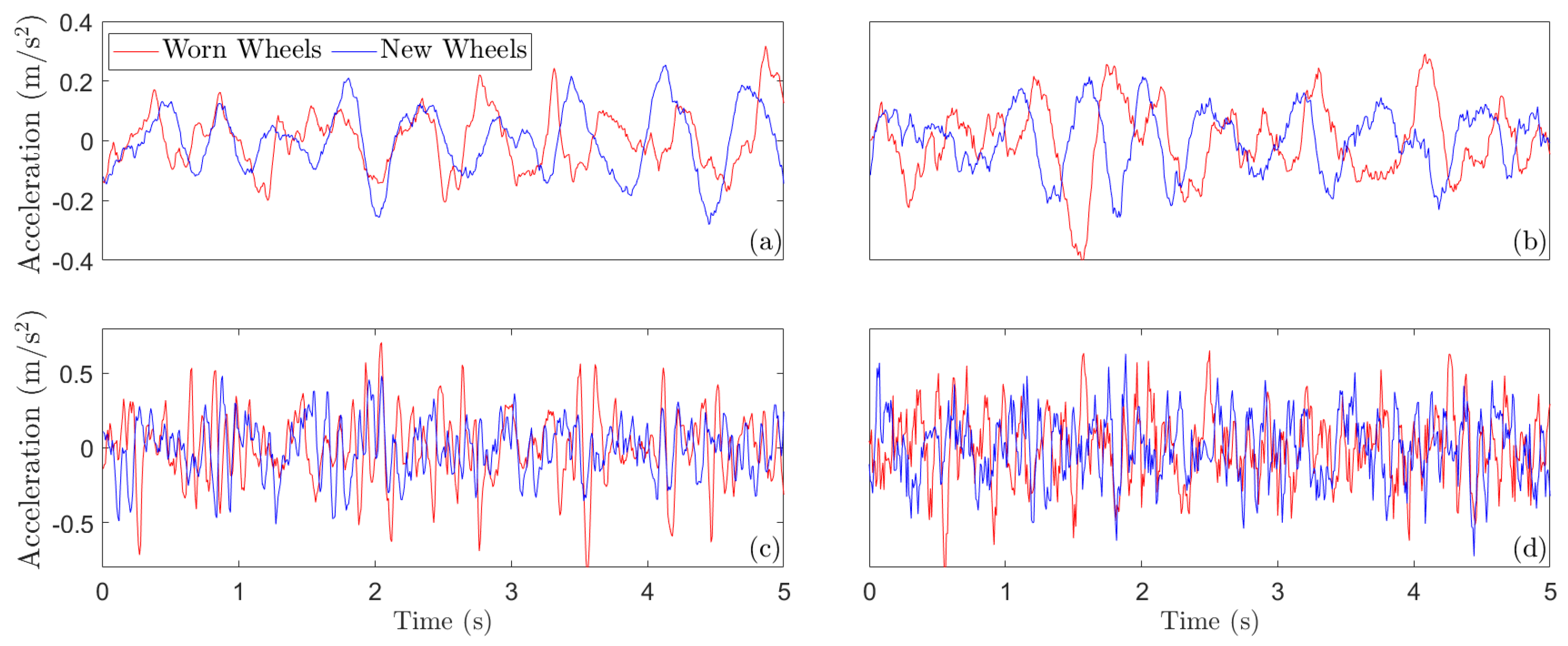
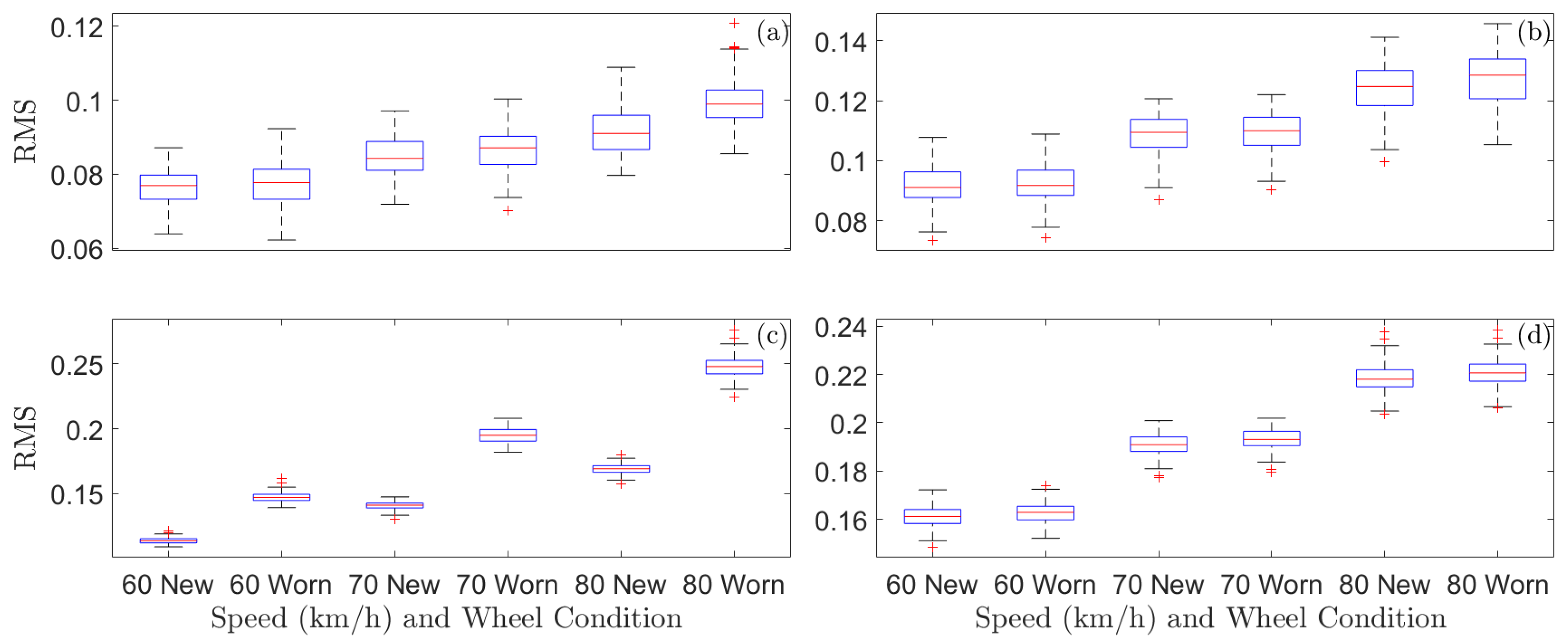
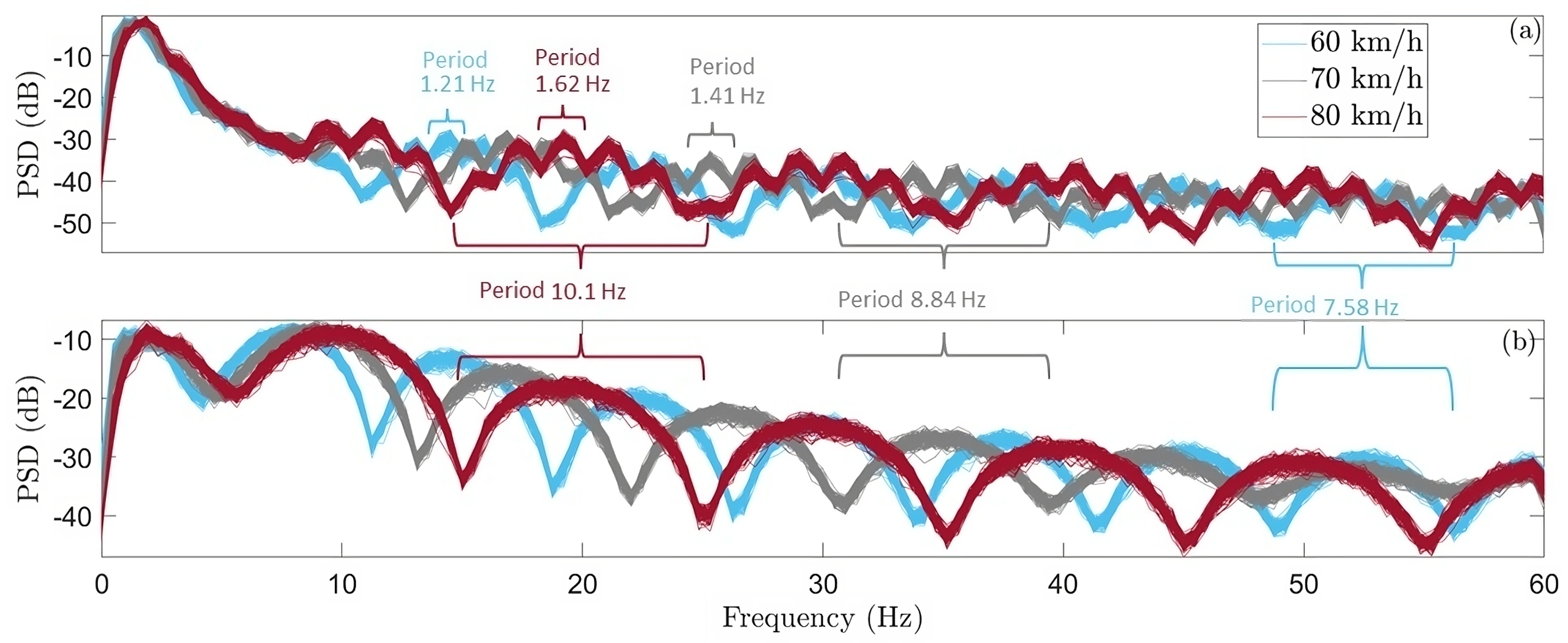
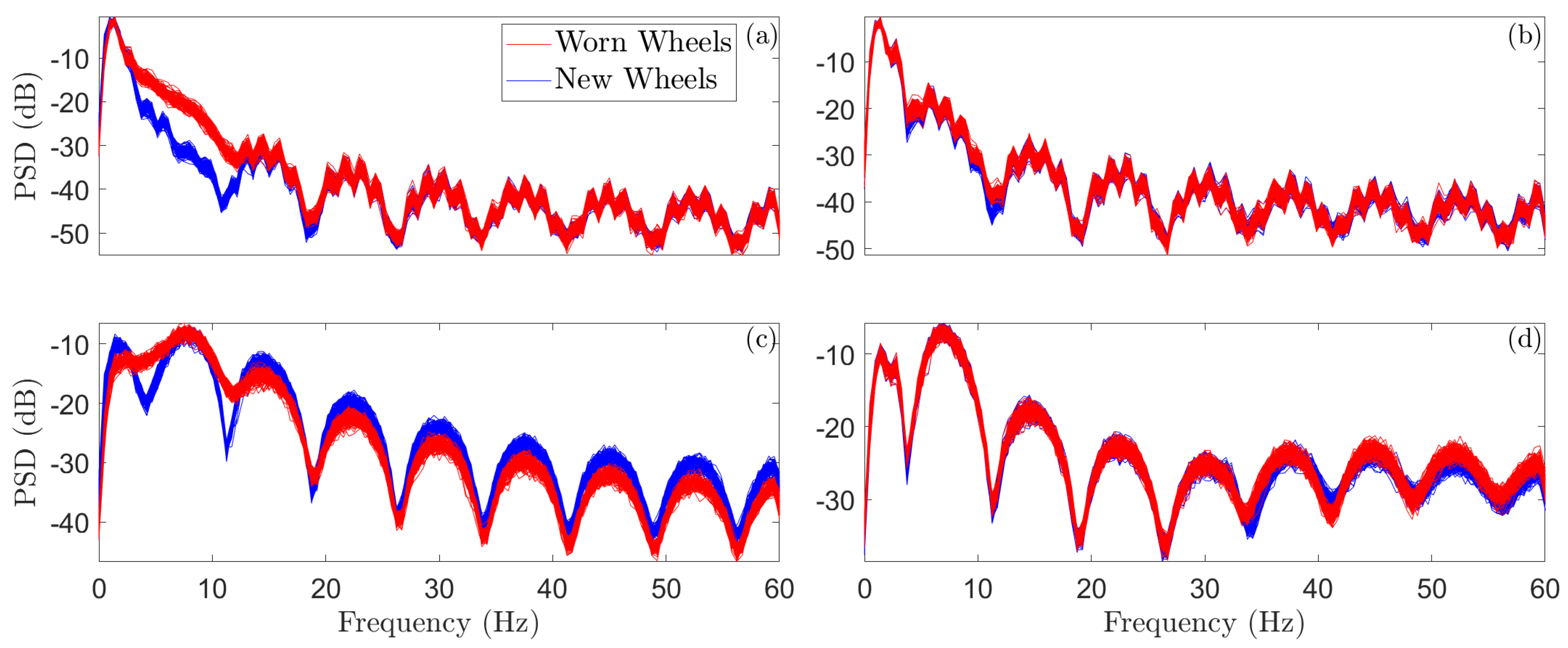
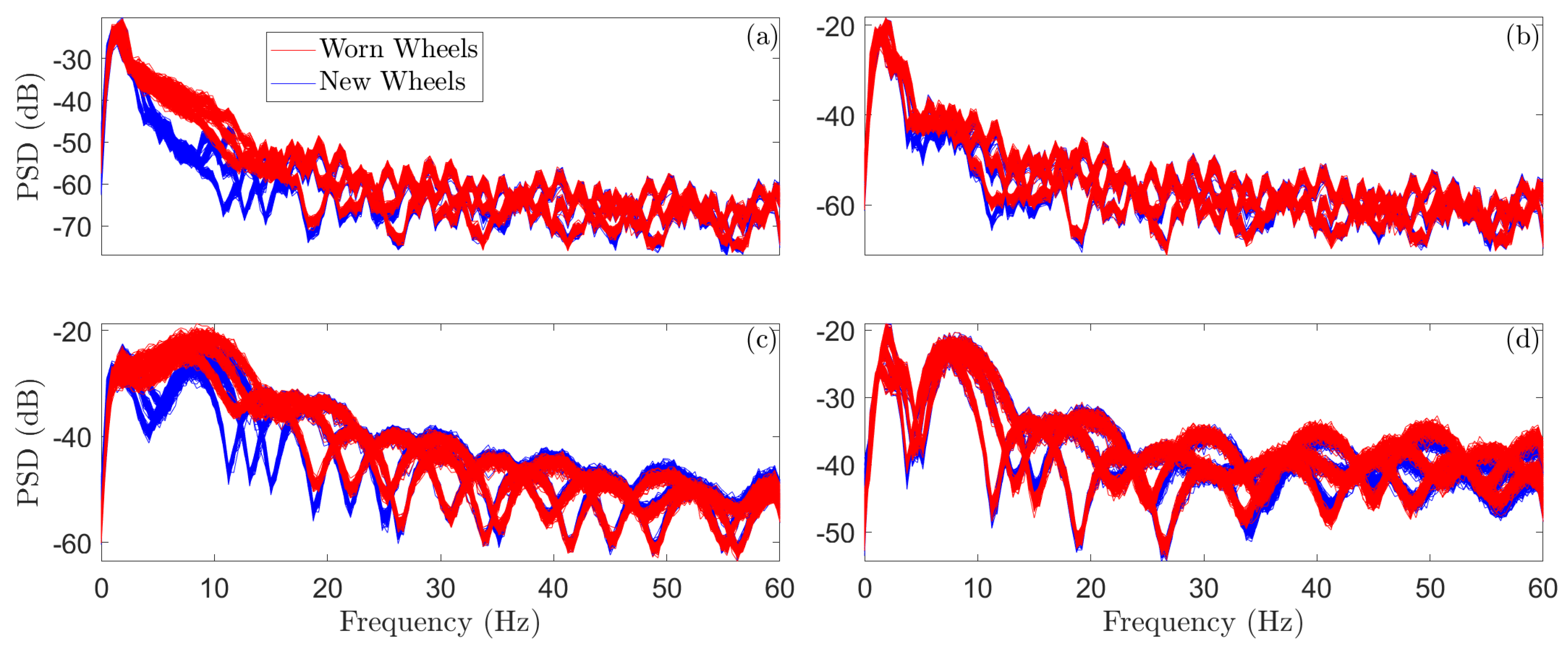
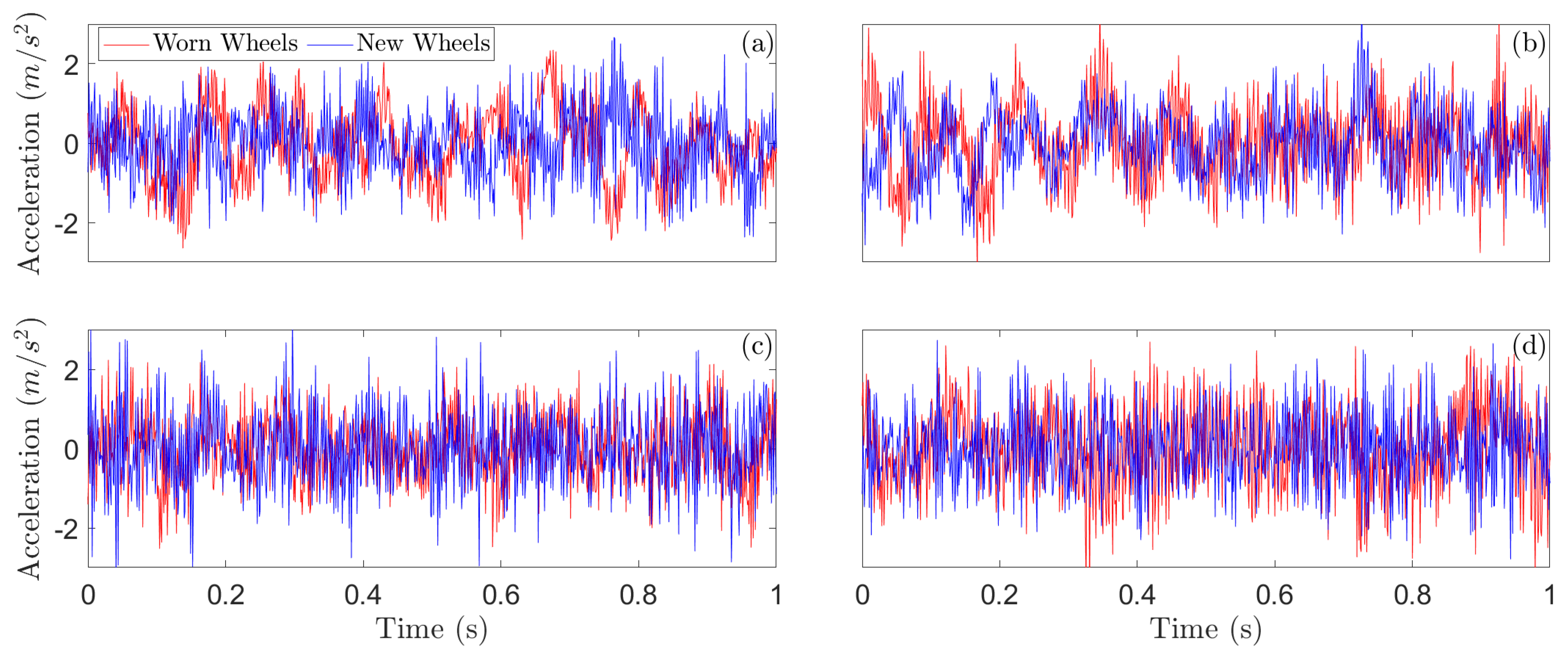
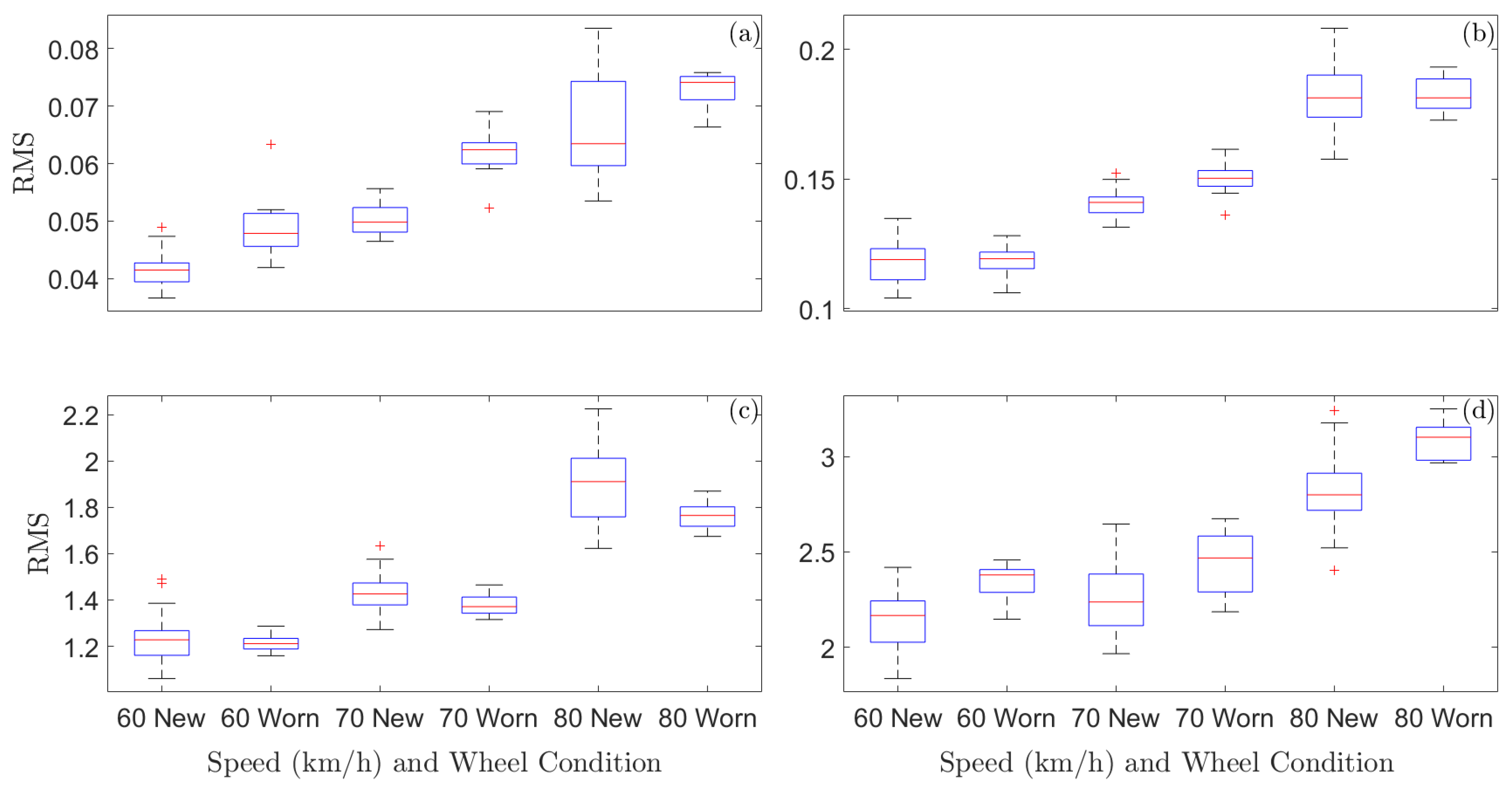
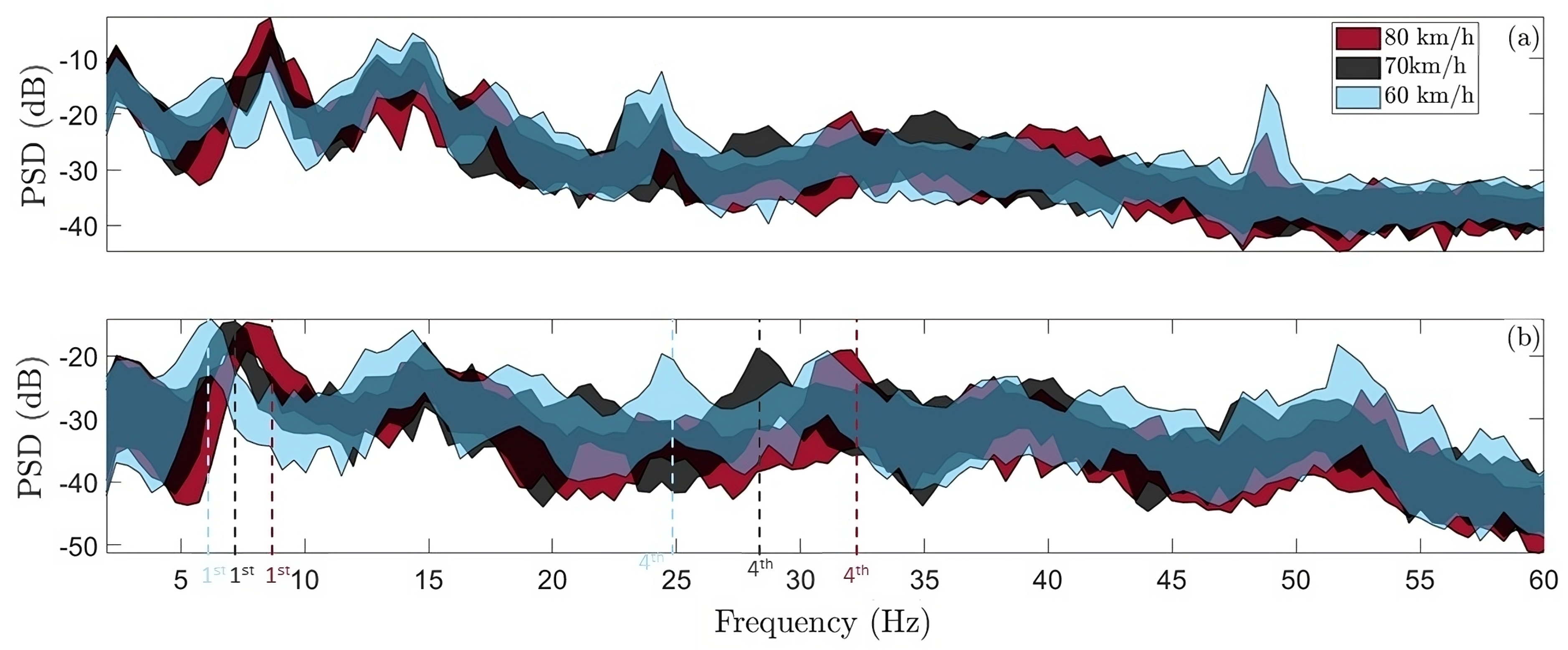
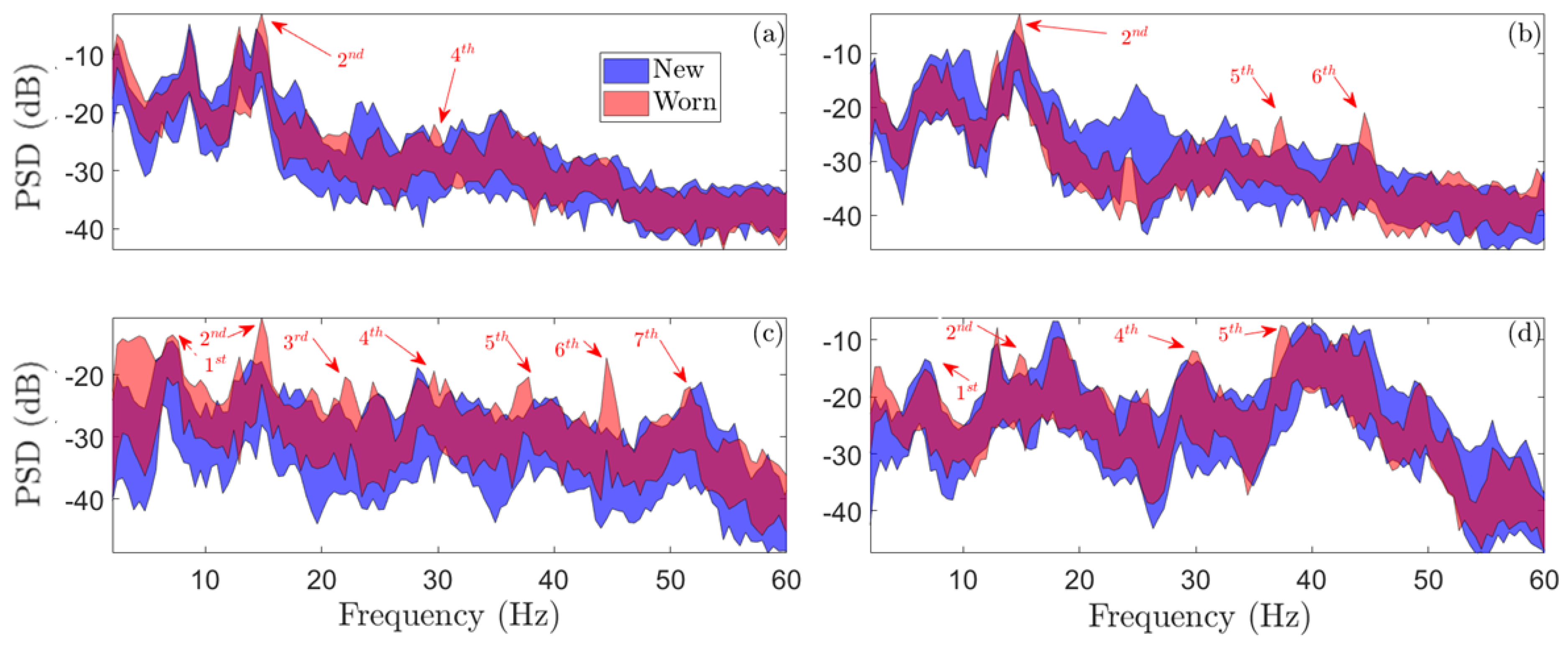
3.3. Effects of the Vehicle Speed and Wheels Condition on the Vibration Signals and the Vehicle Dynamics
4. Case Study B: Field Tests with an Athens Metro Train
4.1. The Train and the Measurement Set-Up
4.2. Operating Conditions and Random Vibrations Signals
4.3. Effects of the Vehicle Speed and Worn Wheels on the Vibration Signals and the Vehicle Dynamics
5. The Wheel Wear Detection Methods
5.1. The U-MM-PSD Method
- Step 1:
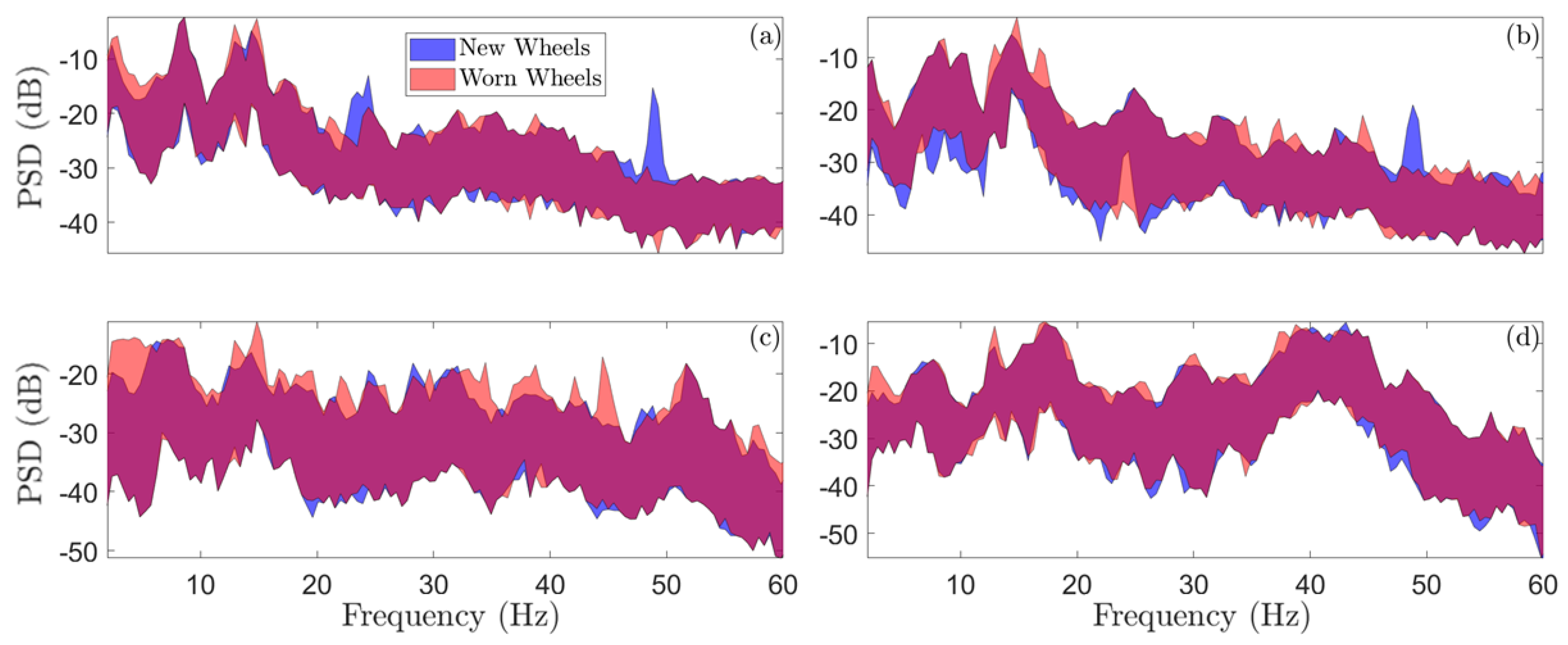
- Multiple model representation (baseline phase). The MM representation of the railway vehicle dynamics is constructed in this step based on the n signals of the baseline phase (also see Section 2); the use of the same number of signals per speed is preferred. Thus, the MM representation in this method consists of n Welch-based [31] (pp. 186–187) PSD estimates. The obtained values of the PSD constitute the method’s feature vector—the complete or part of the measured frequency bandwidth may be used (the PSD in the 2–60 Hz frequency range is herein suggested for the detection of early-stage wheel hollow wear)—while the PSD estimate from a single (from the n) signal corresponds to a single model from the set of models that compose the MM representation.
- Step 2:
- Feature vector reduction (baseline phase). The reduction in the feature vector dimensionality is performed in this step in order to remove frequencies with high sensitivity to the varying OCs (presently, the vehicle’s speed). Thus, the PSD sample variance per frequency is obtained, and the frequencies are reordered in the feature vector from the one with the minimum variance to that with the maximum. The first k frequencies are retained in the feature vector, with k being user defined.
- Step 3:
- Inspection phase. Once a fresh vibration signal is obtained in real time from the vehicle with wheels of unknown condition, the objective in this step is to decide whether or not the current vehicle dynamics belongs to the MM representation . If it does, then the wheels are indicated as healthy, and otherwise as worn. To this end, a new PSD estimate, , is obtained based on the measurements of this phase (also see Section 2), and the method’s feature vector is formulated in order to include the PSD values of the frequencies selected to the previous step. Then, the following distance metricD is utilized for the decision making:with designating the Euclidean distance. The detection of worn wheels is then declared if and only if , with determined based on the values of the D metric in the baseline phase.
5.2. The U-MM-AR Method
- Step 1:
- Multiple model representation (baseline phase). As for the previous method, this step includes the construction of the MM representation of the railway vehicle dynamics based on the n signals of the baseline phase; the same number of signals per speed is also suggested for this method. Thus, the MM representation in this method consists of n AR models (each one estimated using a single vibration signal) of the form [30]with designating the model order, the j-th AR parameter, and the model residual that should be a white Gaussian zero-mean sequence with variance . stands for normally independently distributed with the indicated mean and variance. The method’s feature vector for worn wheels damage detection is the AR model parameter vector (bold-face upper-/lower-case symbols: matrix/column vector quantities; : matrix transposition) which is obtained along with its covariance for each AR model based on standard identification procedures [31] (pp. 318–320), using the ratio of the model residual sum of squares to signal sum of squares (RSS/SSS %), the Bayesian information criterion (BIC) and the samples per estimated parameter (SPP) for the model order selection.It is noted that once the parameters of the multiple AR models have been estimated, these may be considered surrogate models based on the fact that they may represent the vehicle partial (with respect to the employed sensor location) dynamics under different traveling speeds. Such a model may also provide predictions of the vehicle acceleration response at the sensor location using the time history of the measurements at that point.
- Step 2:
- Inspection phase. As for the previous method, once a fresh vibration signal is obtained in real time from the vehicle under unknown speed and wheel condition, a new AR model of the same order as those in with parameter vector is estimated, and a distance metric, such as that in Equation (1), is used for the detection of the worn wheels, with designating in this method the Kullback–Leibler divergence [32] between the models and :where is the trace and the determinant of the indicated matrix. As previously, if D exceeds a user-defined critical limit—which is set in the baseline phase based on signals from the vehicle with the healthy wheels—then the unknown wheels condition is declared as worn, and otherwise as healthy.
6. Performance Assessment of the Wheel Wear Detection Methods
6.1. Assessment Procedure
6.2. Performance Assessment of the U-MM-PSD Method
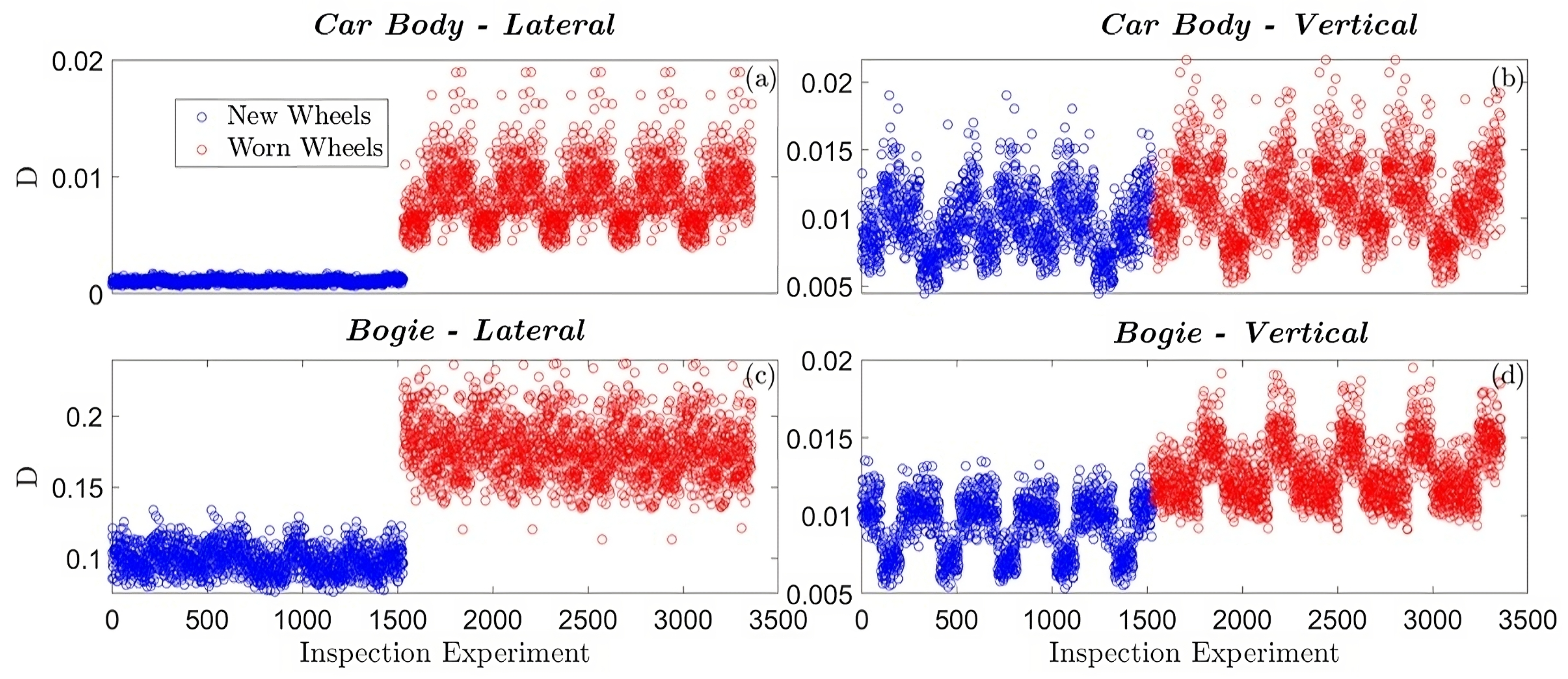
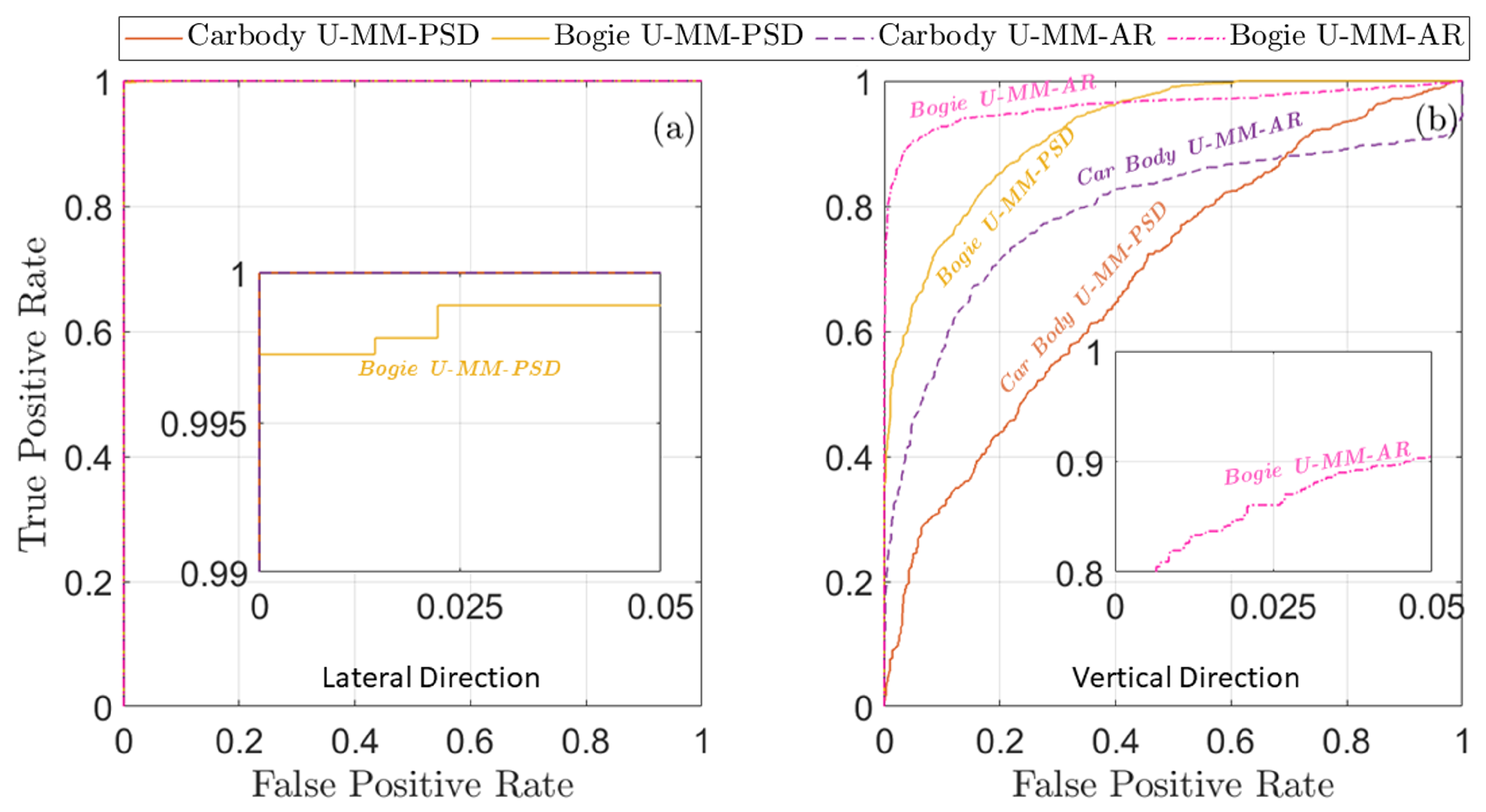
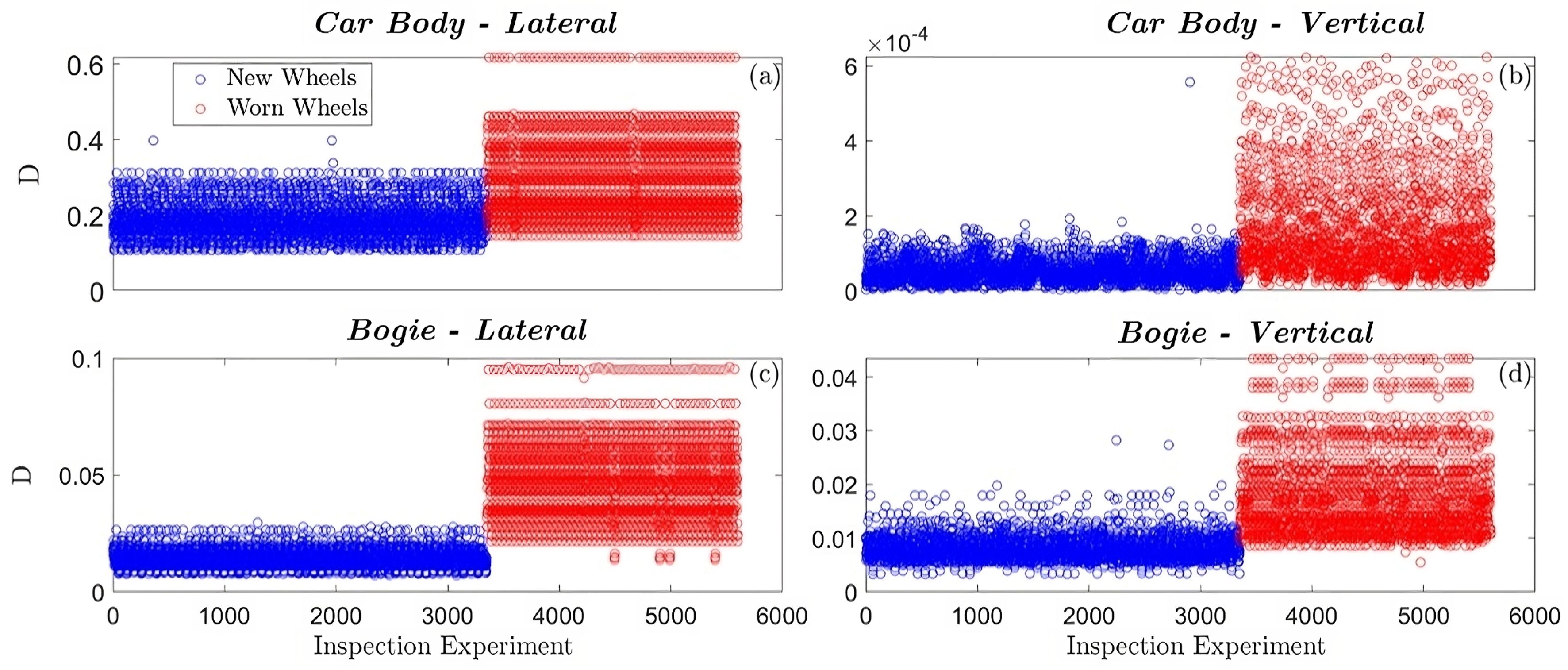
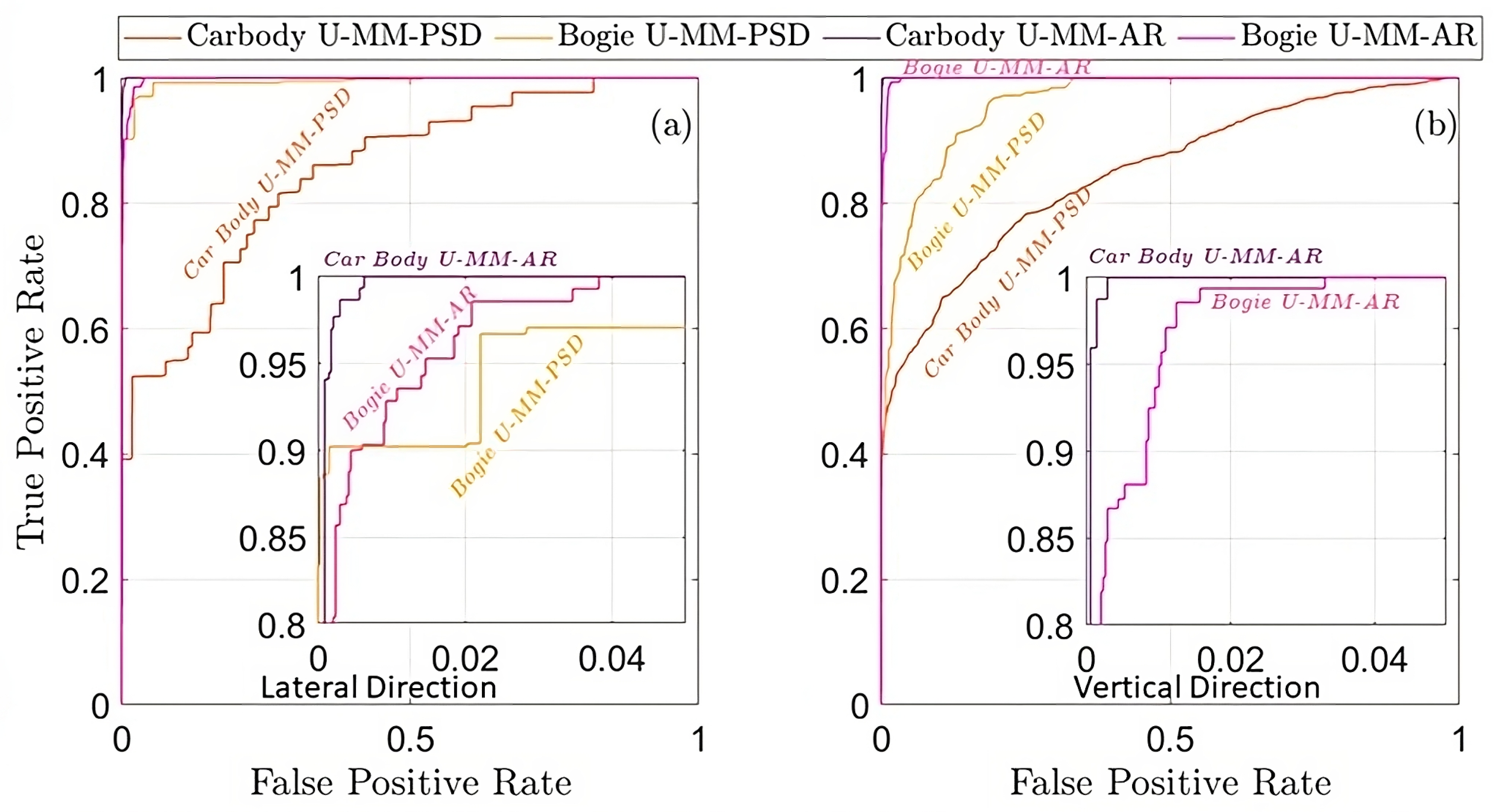
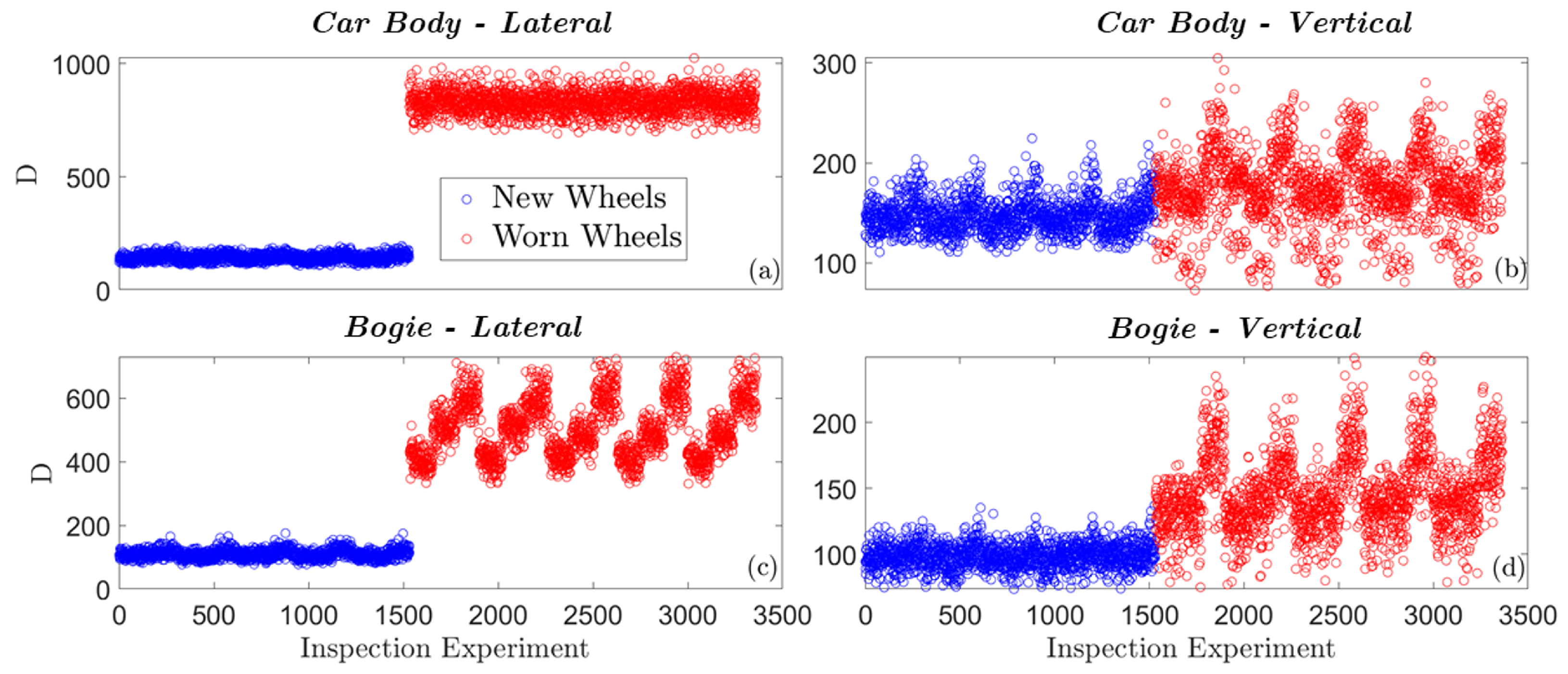
- Case Study A. Welch-based PSD estimates are obtained using vibration signals (20 per speed) in Step 1 of the baseline phase for each rotation (also see Table 3) and for each of the considered sensors. All details about the method per employed sensor are shown in Table 5, while the method’s distance metric D plot and the corresponding ROC curves are illustrated in Figure 14 and Figure 15, respectively. Based on these, the method’s performance is characterized as follows.



{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Method | Feature | Feature Vector Length Per Sensor | Distance Metric |
|---|---|---|---|
| U-MM-PSD * | PSD vector | Euclidean | |
| U-MM-AR ** | AR parameter vector | Kullback–Leibler |
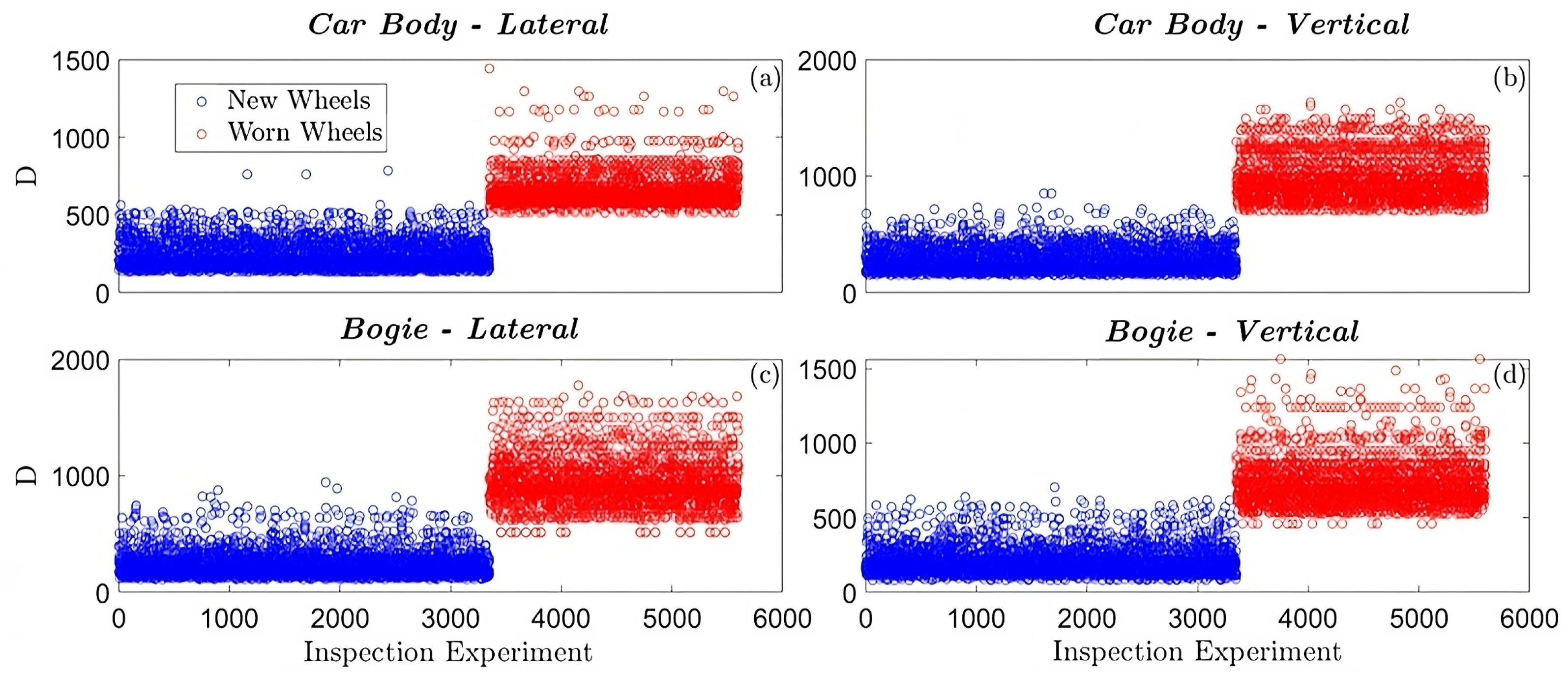
- Case Study B. As in the previous case study, the method is applied using vibration signals (20 per speed) from each of the considered sensors in the baseline phase and for each rotation (also see Table 4). The details of the method’s operation per employed sensor are shown in Table 6. The method’s distance metric D plots and the corresponding ROC curves are presented in Figure 16 and Figure 17, respectively. Based on these, the method’s performance is characterized as follows.


| Method | Feature | Feature Vector Length Per Sensor | Distance Metric |
|---|---|---|---|
| U-MM-PSD * | PSD vector | 113/4/117/42 | Euclidean |
| U-MM-AR ** | AR parameter vector | 140/150/110/90 | Kullback–Leibler |
6.3. Performance Assessment of the U-MM-AR Method
- Case Study A. Twenty signals (also see Table 3) per speed (60/70/80 km/h) are used in the baseline phase for the estimation of a corresponding number of AR models per sensor. The order (equal to parameter vector dimensionality) of each of the obtained AR models per sensor and related details are shown in Table 5, while the scatter-type plots of the method’s distance metric D and the corresponding ROC curves are illustrated in Figure 15 and Figure 18, respectively. Based on these, the method’s performance is characterized as follows:


7. Critical Discussion on the Results
8. Conclusions
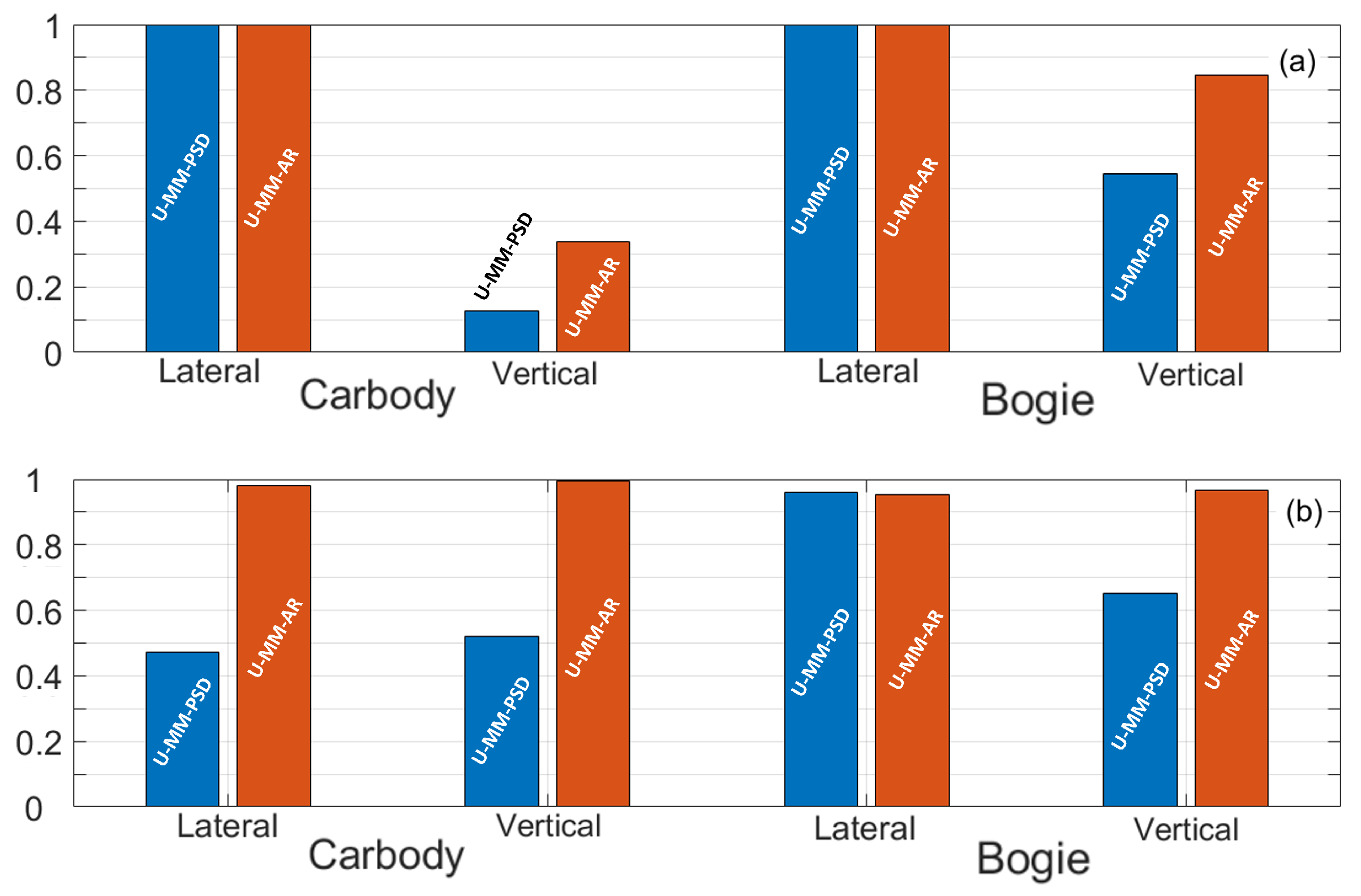
- The detection of early-stage hollow worn wheels is a highly challenging problem, as the measured dynamics via vibration signals is significantly affected by the traveling speed and effects due to hollow wear potentially being fully “masked” by the effects due to speed variation.
- The lateral direction measurements of acceleration on the vehicle carbody and especially on the bogie are, as expected, more sensitive to wheel hollow wear, yet signals on the vertical direction may be used complementarily for the detection of other types of wheel defects.
- Advanced data-driven methods may effectively tackle the problem of railway vehicle worn wheels under different speeds using on-board random vibration measurements from even a single sensor. The prerequisite of such methods is their training via an adequate number of vibration signal batches from the vehicle traveling at normal operation speeds with healthy wheels.
Author Contributions
Funding
Data Availability Statement
Acknowledgments
Conflicts of Interest
Appendix A. Details of the SIMPACK Railway Vehicle Model (Case Study A)

| Parameter | Description | Value | Unit |
|---|---|---|---|
| Carbody mass | 19,529 | [kg] | |
| Bogie frame mass | 2049 | [kg] | |
| Wheelset mass | 2132 | [kg] | |
| Axle box mass | 30 | [kg] | |
| Carbody roll moment of inertia | 55,953 | [kg m2] | |
| Carbody pitch moment of inertia | 1,311,322 | [kg m2] | |
| Carbody yaw moment of inertia | 1,309,593 | [kg m2] | |
| Bogie roll moment of inertia | 1314 | [kg m2] | |
| Bogie pitch moment of inertia | 1470 | [kg m2] | |
| Bogie yaw moment of inertia | 2660 | [kg m2] | |
| Wheelset roll moment of inertia | 474 | [kg m2] | |
| Wheelset pitch moment of inertia | 30 | [kg m2] | |
| Wheelset yaw moment of inertia | 474 | [kg m2] | |
| Carbody width | 2 | [m] | |
| Carbody length | 17 | [m] | |
| Distance between center of gravity (c.g.) of carbody | |||
| and c.g. of bogie | [m] | ||
| Distance between wheelsets in a bogie (wheelbase) | [m] | ||
| Wheel rolling circle diameter | 860 | [mm] | |
| Rail inclination | 1:20 | ||
| Wheel profile | S1002 | ||
| Rail profile | UIC54 | ||
| Prim.Sups. Longitudinal Stiffness | kN/mm | ||
| Prim.Sups. Lateral Stiffness | kN/mm | ||
| Prim.Sups. Longitudinal Stiffness | kN/mm | ||
| Prim.Sups. Longitudinal Damping | 20 | kN·s/m | |
| Prim.Sups. Lateral Damping | 15 | kN·s/m | |
| Prim.Sups. Vertical Damping | 12 | kN·s/m | |
| Sec.Sups. Longitudinal Stiffness | kN/mm | ||
| Sec.Sups. Lateral Stiffness | kN/mm | ||
| Sec.Sups. Longitudinal Stiffness | kN/mm | ||
| Sec.Sups. Longitudinal Damping | 10 | kN·s/m | |
| Sec.Sups. Lateral Damping | 10 | kN·s/m | |
| Sec.Sups. Vertical Damping | 10 | kN·s/m | |
| Lateral Damper Damping | 50 | kN·s/m | |
| v | Vehicle Speed | km/h |
Appendix B. Important Symbols and Acronyms
| Important Symbols | Acronyms | ||
| j-th AR (scalar) parameter | AR | Autoregressive (model) | |
| distance between the models and | BIC | Bayesian Information Criterion | |
| D | distance metric used in the MM methods | AUC | Area Under the ROC Curve |
| AR model order | |||
| railway vehicle wheel diameter | OCs | Operating Conditions | |
| i-th AR model residual signal | TPR | True Positive Rate | |
| sampling frequency | FPR | False Positive Rate | |
| cut-off frequency | MM | Multiple Model | |
| wheel rotation frequency | NID | Normally Independently | |
| Distributed | |||
| k | number of frequencies retained in | OOR | Out-Of-Roundness |
| the U-MM-PSD method | |||
| carbody lateral/vertical vibration measurements | PHM | Prognostics and Health | |
| bogie lateral/vertical vibration measurements | Management | ||
| n | MM dimensionality | PSD | Power Spectral Density |
| i-th model representing the vehicle dynamics | RMS | Root Mean Square | |
| corresponding to healthy wheels | |||
| model representing the vehicle dynamics | RSS | Residual Sum of Squares | |
| under unknown speed and wheels condition | |||
| N | vibration signal length (samples) | SSS | Series Sum of Squares |
| normalized by the sampling period | SPP | Samples Per Parameter | |
| discrete time | |||
| vibration response signal from the vehicle | STS | Statistical Time Series | |
| under unknown speed and wheels condition | |||
| i-th AR model parameter vector corresponding | |||
| to model | U-MM-AR | Unsupervised Multiple Model | |
| covariance matrix of | Autoregressive parameter | ||
| based method | |||
| AR model parameter vector corresponding | U-MM-PSD | Unsupervised Multiple Model | |
| to model | Power Spectral Density | ||
| covariance matrix of | based method | ||
References
- Jardine, A.K.; Lin, D.; Banjevic, D. A review on machinery diagnostics and prognostics implementing condition-based maintenance. Mech. Syst. Signal Process. 2006, 20, 1483–1510. [Google Scholar] [CrossRef]
- Polach, O.; Nicklisch, D. Wheel/rail contact geometry parameters in regard to vehicle behaviour and their alteration with wear. Wear 2016, 366–367, 200–208. [Google Scholar] [CrossRef]
- Soleimani, H. Tribological Aspects of Wheel—Rail Contact: A Review of Wear Mechanisms and Effective Factors on Rolling Contact Fatigue. Urban Rail Transit 2017, 3, 227–237. [Google Scholar] [CrossRef]
- Asplund, M.; Palo, M.; Famurewa, S.; Rantatalo, M. A study of railway wheel profile parameters used as indicators of an increased risk of wheel defects. Proc. Inst. Mech. Eng. Part F J. Rail Rapid Transit 2016, 230, 323–334. [Google Scholar] [CrossRef]
- Jin, X.; Wu, L.; Fang, J.; Zhong, S.; Ling, L. An investigation into the mechanism of the polygonal wear of metro train wheels and its effect on the dynamic behaviour of a wheel/rail system. Veh. Syst. Dyn. 2012, 50, 1817–1834. [Google Scholar] [CrossRef]
- Jia, S.; Dhanasekar, M. Detection of Rail Wheel Flats using Wavelet Approaches. Struct. Health Monit. 2007, 6, 121–131. [Google Scholar] [CrossRef]
- Liang, B.; Iwnicki, S.; Ball, A.; Young, A. Adaptive noise cancelling and time—Frequency techniques for rail surface defect detection. Mech. Syst. Signal Process. 2015, 54–55, 41–51. [Google Scholar] [CrossRef]
- Zhang, J.; Gao, H.; Liu, Q.; Farzadpour, F.; Grebe, C.; Tian, Y. Adaptive parameter blind source separation technique for wheel condition monitoring. Mech. Syst. Signal Process. 2017, 90, 208–221. [Google Scholar] [CrossRef]
- Ye, Y.; Shi, D.; Krause, P.; Hecht, M. A data-driven method for estimating wheel flat length. Veh. Syst. Dyn. 2020, 58, 1329–1347. [Google Scholar] [CrossRef]
- Nielsen, J.C.O.; Johansson, A. Out-of-round railway wheels-a literature survey. Proc. Inst. Mech. Eng. Part F J. Rail Rapid Transit 2000, 214, 79–91. [Google Scholar] [CrossRef]
- Sun, Q.; Chen, C.; Kemp, A.H.; Brooks, P. An on-board detection framework for polygon wear of railway wheel based on vibration acceleration of axle-box. Mech. Syst. Signal Process. 2021, 153, 107540. [Google Scholar] [CrossRef]
- Zeng, D.; Xu, T.; Wang, J.; Lu, L.; Meng, W.; Jiang, B.; Zou, Q. Investigation of the crack initiation of subsurface rolling contact fatigue in railway wheels. Int. J. Fatigue 2020, 130, 105281. [Google Scholar] [CrossRef]
- Kato, T.; Fujimura, T.; Yamamoto, Y.; Dedmon, S.; Hiramatsu, S.; Kato, H.; Kimura, Y.; Pilch, J. Critical internal defect size for subsurface crack initiation in heavy haul car wheels. Wear 2019, 438–439, 203038. [Google Scholar] [CrossRef]
- Pau, M.; Leban, B.; Baldi, A. Simultaneous subsurface defect detection and contact parameter assessment in a wheel—Rail system. Wear 2008, 265, 1837–1847. [Google Scholar] [CrossRef]
- Sutharssan, T.; Stoyanov, S.; Bailey, C.; Yin, C. Prognostic and health management for engineering systems: A review of the data-driven approach and algorithms. J. Eng. 2015, 2015, 215–222. [Google Scholar] [CrossRef]
- Gasparetto, L.; Alfi, S.; Bruni, S. Data-driven condition-based monitoring of high-speed railway bogies. Int. J. Rail Transp. 2013, 1, 42–56. [Google Scholar] [CrossRef]
- Papaelias, M.; Amini, A.; Huang, Z.; Vallely, P.; Dias, D.C.; Kerkyras, S. Online condition monitoring of rolling stock wheels and axle bearings. Proc. Inst. Mech. Eng. Part F J. Rail Rapid Transit 2016, 230, 709–723. [Google Scholar] [CrossRef]
- Wang, Y.; Ni, Y.; Wang, X. Real-time defect detection of high-speed train wheels by using Bayesian forecasting and dynamic model. Mech. Syst. Signal Process. 2020, 139, 106654. [Google Scholar] [CrossRef]
- Ward, C.P.; Weston, P.F.; Stewart, E.J.C.; Li, H.; Goodall, R.M.; Roberts, C.; Mei, T.X.; Charles, G.; Dixon, R. Condition Monitoring Opportunities Using Vehicle-Based Sensors. Proc. Inst. Mech. Eng. Part F J. Rail Rapid Transit 2011, 225, 202–218. [Google Scholar] [CrossRef]
- Fröhling, R.; Ekberg, A.; Kabo, E. The detrimental effects of hollow wear—Field experiences and numerical simulations. Wear 2008, 265, 1283–1291. [Google Scholar] [CrossRef]
- Sawley, K.; Wu, H. The formation of hollow-worn wheels and their effect on wheel/rail interaction. Wear 2005, 258, 1179–1186. [Google Scholar] [CrossRef]
- Sawley, K.; Urban, C.; Walker, R. The effect of hollow-worn wheels on vehicle stability in straight track. Wear 2005, 258, 1100–1108. [Google Scholar] [CrossRef]
- Pires, A.; Pacheco, L.; Dalvi, I.; Endlich, C.; Queiroz, J.; Antoniolli, F.; Santos, G. The effect of railway wheel wear on reprofiling and service life. Wear 2021, 477, 203799. [Google Scholar] [CrossRef]
- Zhai, W.; Liu, P.; Lin, J.; Wang, K. Experimental investigation on vibration behaviour of a CRH train at speed of 350 km/h. Int. J. Rail Transp. 2015, 3, 1–16. [Google Scholar] [CrossRef]
- Wang, J.; Song, C.; Wu, P.; Dai, H. Wheel reprofiling interval optimization based on dynamic behavior evolution for high speed trains. Wear 2016, 366–367, 316–324. [Google Scholar] [CrossRef]
- Shi, H.; Wang, J.; Wu, P.; Song, C.; Teng, W. Field measurements of the evolution of wheel wear and vehicle dynamics for high-speed trains. Veh. Syst. Dyn. 2018, 56, 1187–1206. [Google Scholar] [CrossRef]
- Wu, X.; Rakheja, S.; Wu, H.; Qu, S.; Wu, P.; Dai, H.; Zeng, J.; Ahmed, A.K.W. A study of polygonal wheel wear through a field test programme. Veh. Syst. Dyn. 2019, 57, 914–934. [Google Scholar] [CrossRef]
- Charles, G.; Goodall, R.; Dixon, R. Model-based condition monitoring at the wheel—Rail interface. Veh. Syst. Dyn. 2008, 46, 415–430. [Google Scholar] [CrossRef]
- Aravanis, T.C.; Sakellariou, J.; Fassois, S. A stochastic Functional Model based method for random vibration based robust fault detection under variable non—Measurable operating conditions with application to railway vehicle suspensions. J. Sound Vib. 2020, 466, 115006. [Google Scholar] [CrossRef]
- Vamvoudakis-Stefanou, K.; Sakellariou, J.; Fassois, S. Vibration-based damage detection for a population of nominally identical structures: Unsupervised Multiple Model (MM) statistical time series type methods. Mech. Syst. Signal Process. 2018, 111, 149–171. [Google Scholar] [CrossRef]
- Ljung, L. System Identification: Theory for the User, 2nd ed.; Prentice–Hall: Hoboken, NJ, USA, 1999. [Google Scholar]
- Press, W.; Teukolsky, S.; Vetterling, W.; Flannery, B. Numerical Recipes: The Art of Scientific Computing, 3rd ed.; Cambridge University Press: Cambridge, UK, 2007. [Google Scholar]
- Rulka, W. SIMPACK—A Computer Program for Simulation of Large-motion Multibody Systems. In Multibody Systems Handbook; Schiehlen, W., Ed.; Springer: Berlin/Heidelberg, Germany, 1990; pp. 265–284. [Google Scholar] [CrossRef]
- Duda, R.; Hart, P.; Stork, D. Pattern Classification, 2nd ed.; John Wiley & Sons: New York, NY, USA, 2000. [Google Scholar]
- Fawcett, T. An introduction to ROC analysis. Pattern Recognit. Lett. 2006, 27, 861–874. [Google Scholar] [CrossRef]
- Kaliorakis, N.; Iliopoulos, I.A.; Vlachospyros, G.; Sakellariou, J.S.; Fassois, S.D.; Deloukas, A.; Leoutsakos, G.; Chronopoulos, E.; Mamaloukakis, C.; Katsiana, K. On the On–Board Random Vibration–Based Detection of Hollow Worn Wheels in Operating Railway Vehicles. In European Workshop on Structural Health Monitoring (EWSHM); Rizzo, P., Milazzo, A., Eds.; Springer: Cham, Switzerland, 2021; pp. 480–489. [Google Scholar] [CrossRef]
- Simpack 2023. Available online: https://www.3ds.com/products-services/simulia/products/simpack/product-modules/rail-modules (accessed on 24 September 2023).
- Polach, O.; Bottcher, A.; Vannucci, D.; Sima, J.; Schelle, H.; Chollet, H.; Gotz, G.; Prada, M.G.; Nicklisch, D.; Mazzola, L.; et al. Validation of simulation models in the context of railway vehicle acceptance. Proc. Inst. Mech. Eng. Part F J. Rail Rapid Transit 2015, 229, 729–754. [Google Scholar] [CrossRef]
- Ye, Y.; Zhang, Y.; Wang, Q.; Wang, Z.; Teng, Z.; Zhang, H. Fault diagnosis of high-speed train suspension systems using multiscale permutation entropy and linear local tangent space alignment. Mech. Syst. Signal Process. 2020, 138, 106565. [Google Scholar] [CrossRef]
- Hou, M.; Chen, B.; Cheng, D. Study on the Evolution of Wheel Wear and Its Impact on Vehicle Dynamics of High-Speed Trains. Coatings 2022, 12, 1333. [Google Scholar] [CrossRef]
- Schupp, G. Bifurcation Analysis of Railway Vehicles. Multibody Syst. Dyn. 2006, 15, 25–50. [Google Scholar] [CrossRef]
- Gadhave, R.; Vyas, N.S. Rail-wheel contact forces and track irregularity estimation from on-board accelerometer data. Veh. Syst. Dyn. 2022, 60, 2145–2166. [Google Scholar] [CrossRef]
- Haigermoser, A.; Luber, B.; Rauh, J.; Gräfe, G. Road and track irregularities: Measurement, assessment and simulation. Veh. Syst. Dyn. 2015, 53, 878–957. [Google Scholar] [CrossRef]
- Kalker, J.J. A Fast Algorithm for the Simplified Theory of Rolling Contact. Veh. Syst. Dyn. 1982, 11, 1–13. [Google Scholar] [CrossRef]
- Iliopoulos, I.A.; Sakellariou, J.S.; Fassois, S.D. Parametric spectral estimation and dynamics identification for a traveling surface vehicle. In Proceedings of the 11th International Conference on Structural Dynamics (EURODYN2020), Athens, Greece, 23–26 November 2020; pp. 1–12. [Google Scholar] [CrossRef]
- Tao, G.; Wen, Z.; Liang, X.; Ren, D.; Jin, X. An investigation into the mechanism of the out-of-round wheels of metro train and its mitigation measures. Veh. Syst. Dyn. 2019, 57, 1–16. [Google Scholar] [CrossRef]
- Bishop, C.M. Pattern Recognition and Machine Learning; Springer Science + Business Media, LLC.: New York, NY, USA, 2006. [Google Scholar]














| Vehicle Speed (km/h) | No. of Signals | |
|---|---|---|
| New Wheels | Worn Wheels | |
| 60 | 122 | 122 |
| 70 | 122 | 122 |
| 80 | 122 | 122 |
| Total | 366 | 366 |
| Sampling frequency: Hz; operational bandwidth: 0–60 Hz; | ||
| signal length: N = 6001 samples (50 s) | ||
| Vehicle Speed (km/h) | No. of Signals | |
|---|---|---|
| New Wheels | Worn Wheels | |
| 60 | 59 | 17 |
| 70 | 38 | 16 |
| 80 | 30 | 12 |
| Total | 127 | 45 |
| Sampling frequency: Hz; operational bandwidth: 2–60 Hz, | ||
| signal length: N = 10,000 samples (∼10.20 s) | ||
| Vehicle Speed (km/h) | Baseline (New Wheels) () | Inspection (New Wheels) () | Inspection (Worn Wheels) () | Aggregated Inspection Test Cases ( *) |
|---|---|---|---|---|
| 60 | 20 | 102 | 122 | 1120 |
| 70 | 20 | 102 | 122 | 1120 |
| 80 | 20 | 102 | 122 | 1120 |
| Total | 60 | 306 | 366 | 3360 |
| Vehicle Speed (km/h) | Baseline (New Wheels) () | Inspection (New Wheels) () | Inspection (Worn Wheels) () | Aggregated Inspection Test Cases () * |
|---|---|---|---|---|
| 60 | 20 | 39 | 17 | 2800 |
| 70 | 20 | 18 | 16 | 1700 |
| 80 | 20 | 10 | 12 | 1000 |
| Total | 60 | 67 | 45 | 5600 |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2023 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Kaliorakis, N.; Sakellariou, J.S.; Fassois, S.D. On-Board Random Vibration-Based Robust Detection of Railway Hollow Worn Wheels under Varying Traveling Speeds. Machines 2023, 11, 933. https://doi.org/10.3390/machines11100933
Kaliorakis N, Sakellariou JS, Fassois SD. On-Board Random Vibration-Based Robust Detection of Railway Hollow Worn Wheels under Varying Traveling Speeds. Machines. 2023; 11(10):933. https://doi.org/10.3390/machines11100933
Chicago/Turabian StyleKaliorakis, Nikolaos, John S. Sakellariou, and Spilios D. Fassois. 2023. "On-Board Random Vibration-Based Robust Detection of Railway Hollow Worn Wheels under Varying Traveling Speeds" Machines 11, no. 10: 933. https://doi.org/10.3390/machines11100933
APA StyleKaliorakis, N., Sakellariou, J. S., & Fassois, S. D. (2023). On-Board Random Vibration-Based Robust Detection of Railway Hollow Worn Wheels under Varying Traveling Speeds. Machines, 11(10), 933. https://doi.org/10.3390/machines11100933