
Dynamic Simulation of Multiple Launch Rocket System Marching Fire Based on the Fuzzy Adaptive Sliding Mode Control


Abstract
:1. Introduction
- The co-simulation dynamic control model of the motor-mechanism coupling MLRS was established.
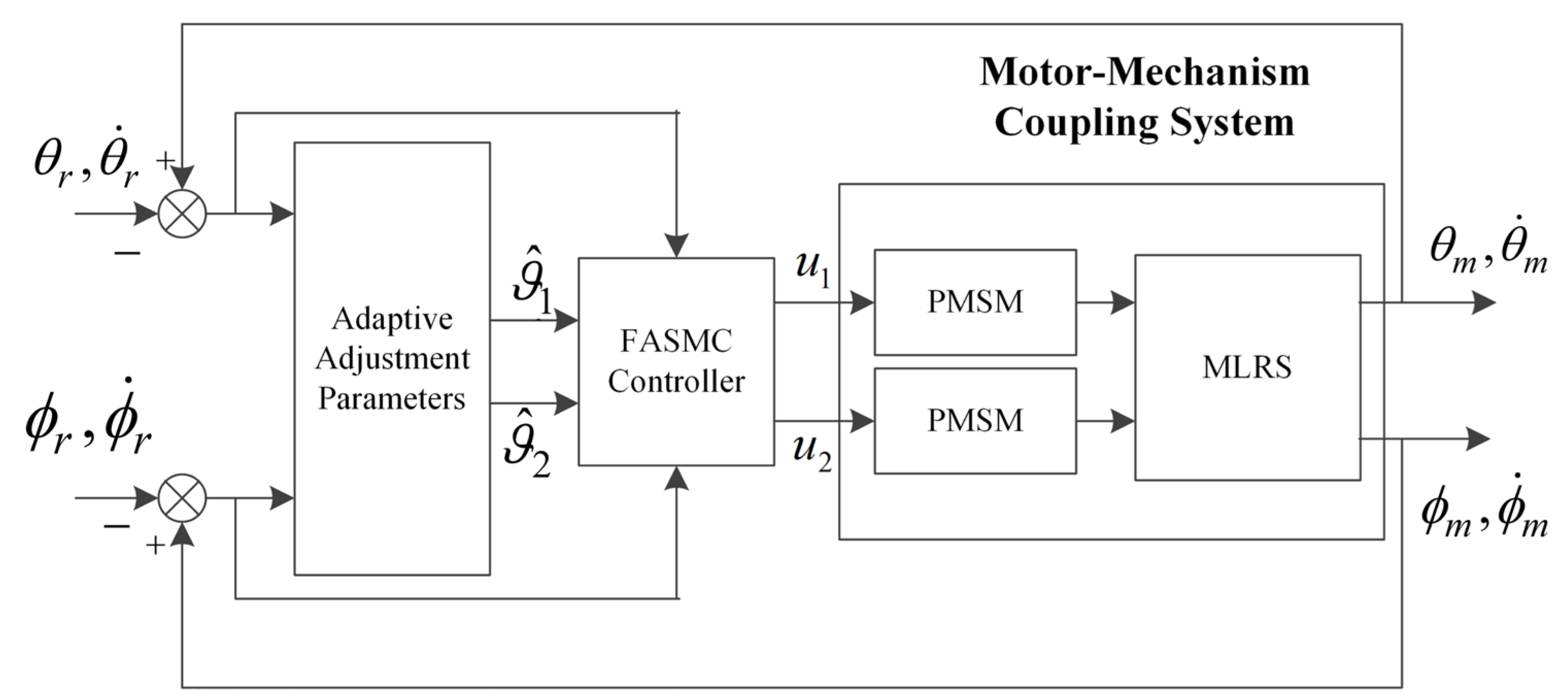
- The FASMC controller was developed considering the systematic nonlinearity, in which the FASMC was built to adapt to the uncertainties of the system.
- The proposed controller is first introduced and successfully applied to the field of the dynamic control for MLRS marching fire considering the occurrence of uncertainties.
2. Nonlinear Dynamic Model of MLRS Marching Fire
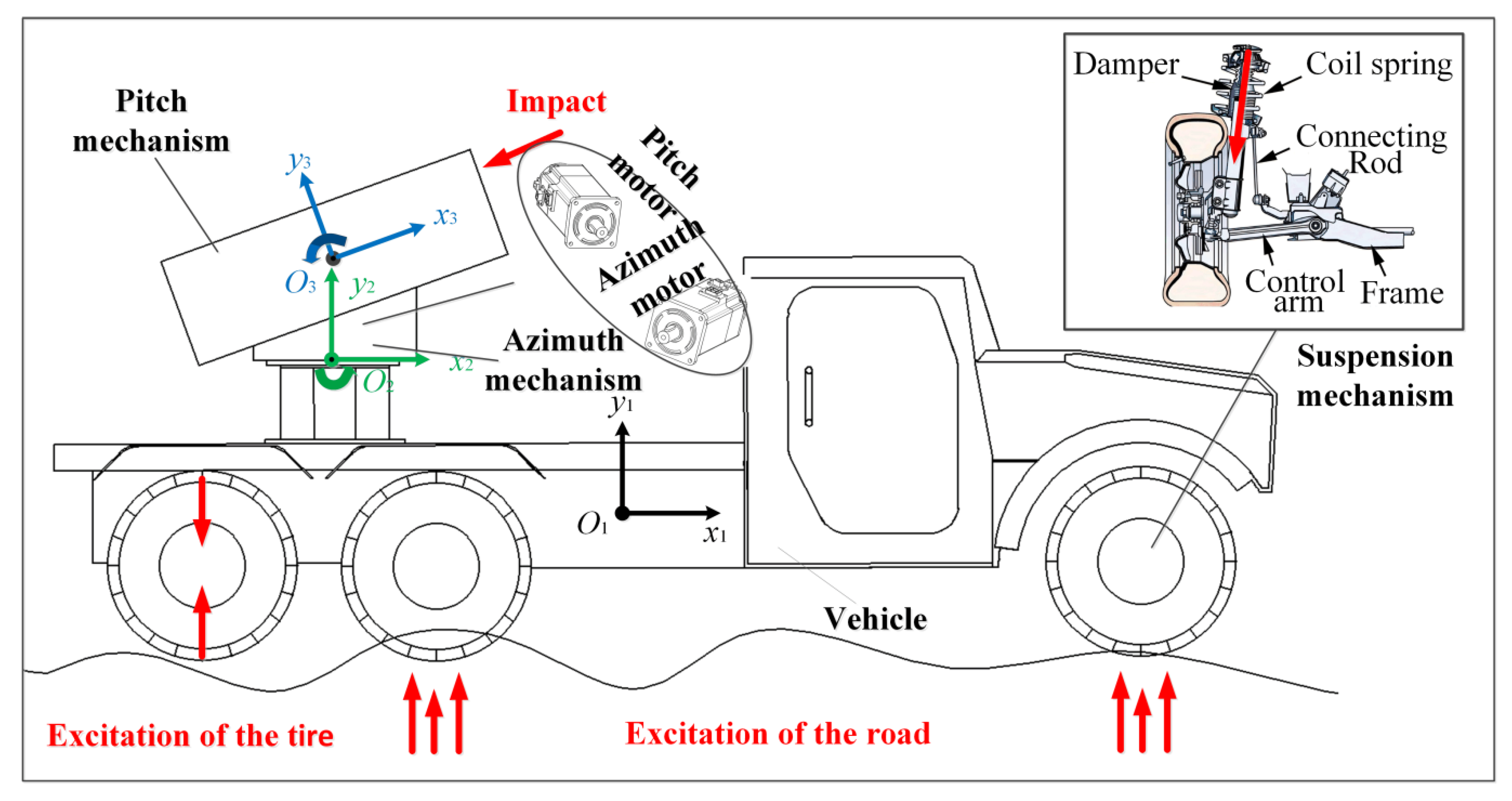
2.1. Mechanical System Dynamic Modeling
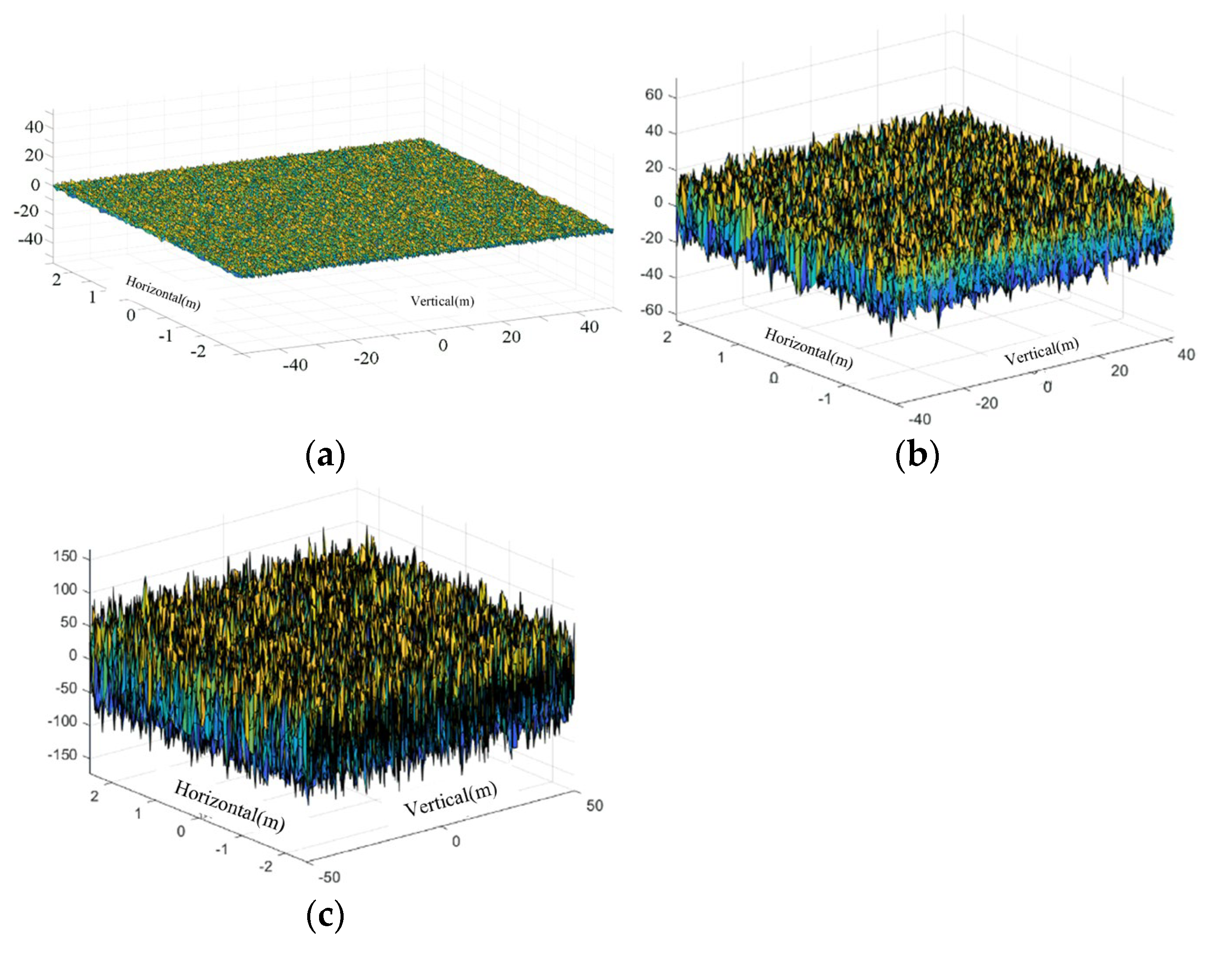
2.2. 3-D Road Roughness Model
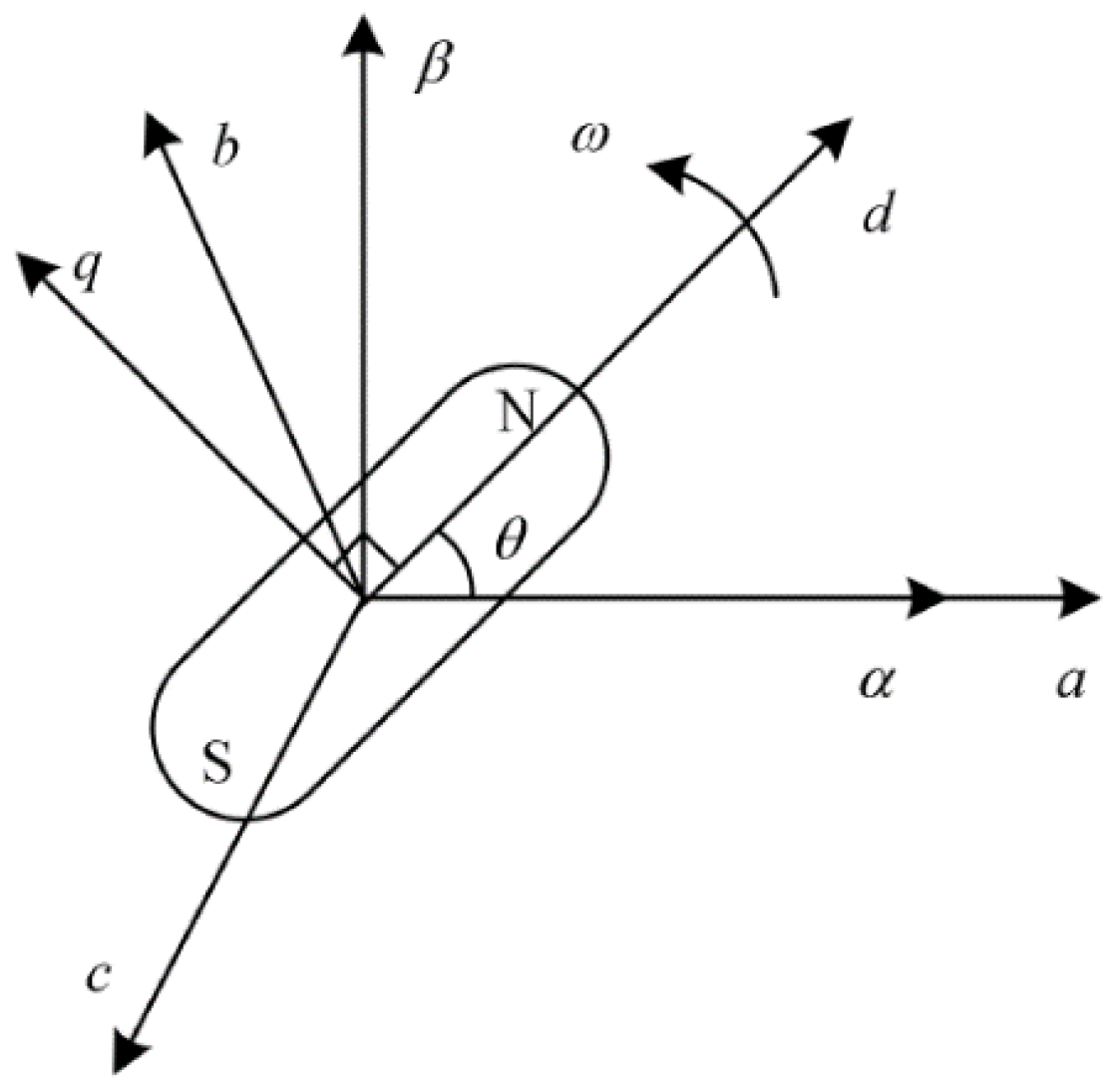
2.3. Permanent Synchronous Motor Modeling
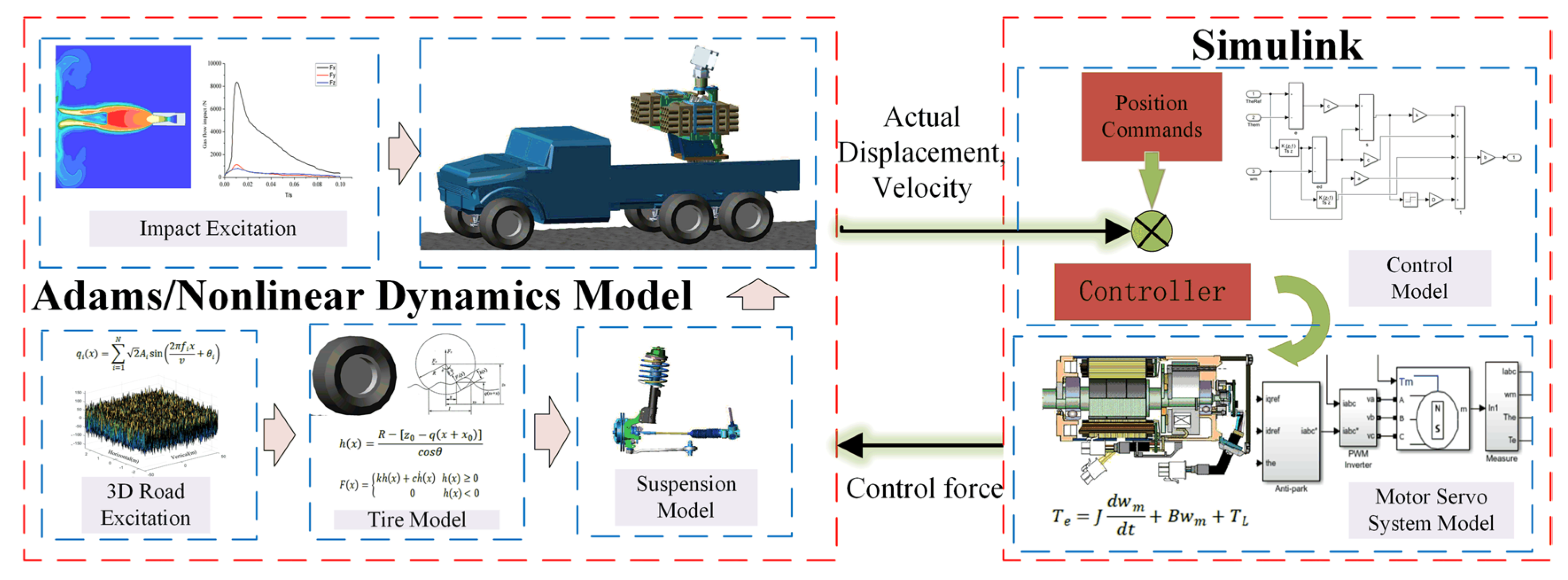
2.4. The Co-Simulation Model of the MLRS
3. Control System Design and Stability Analysis
3.1. Fuzzy Logic System
3.2. Design of Fuzzy Adaptive Sliding Mode Controller
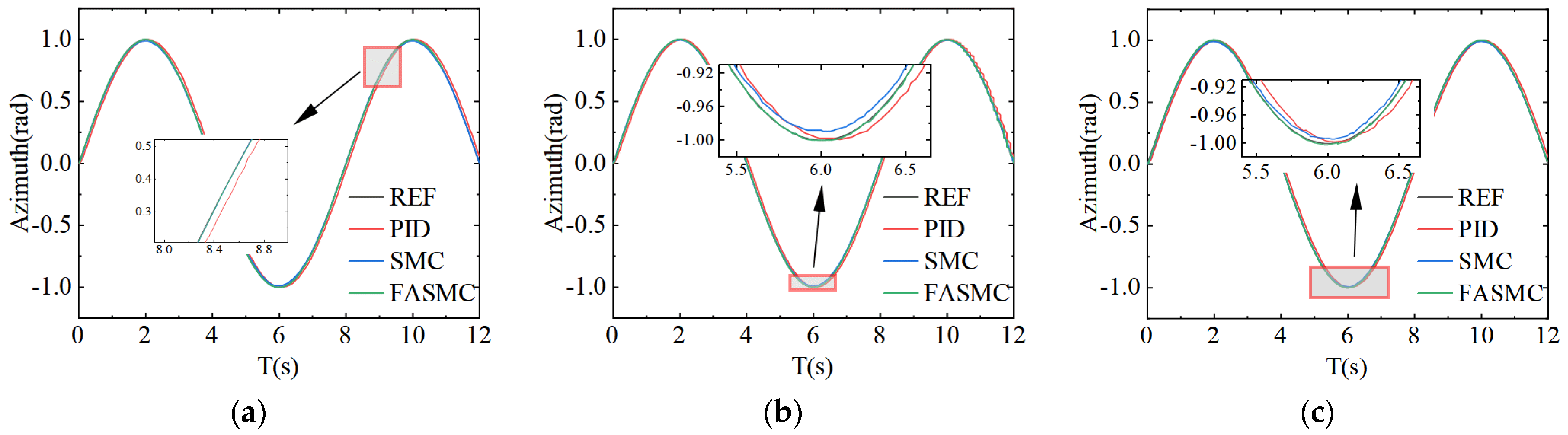
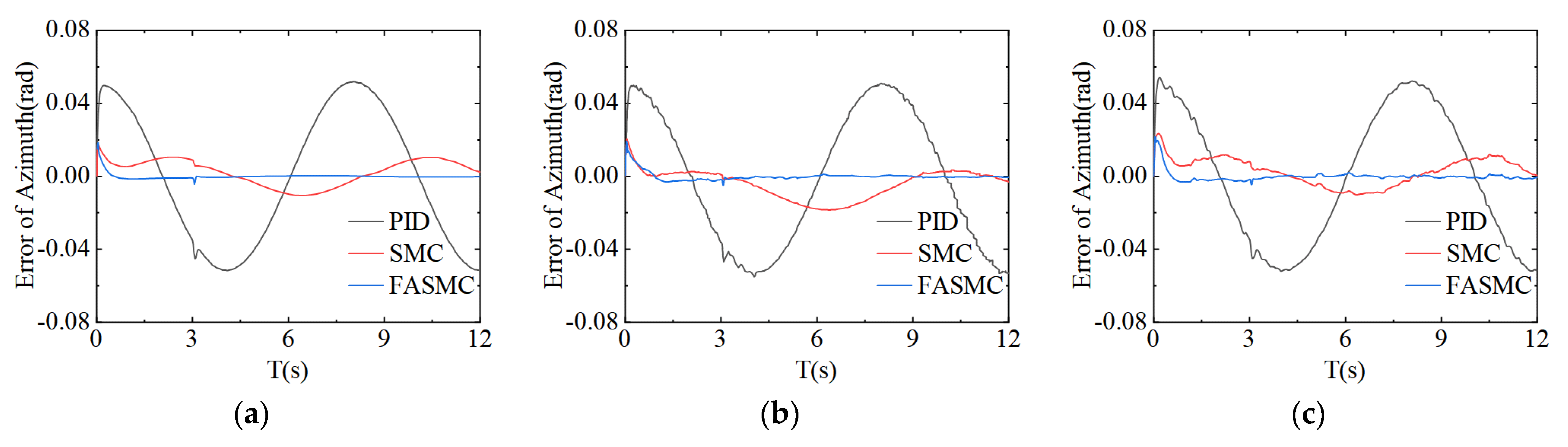
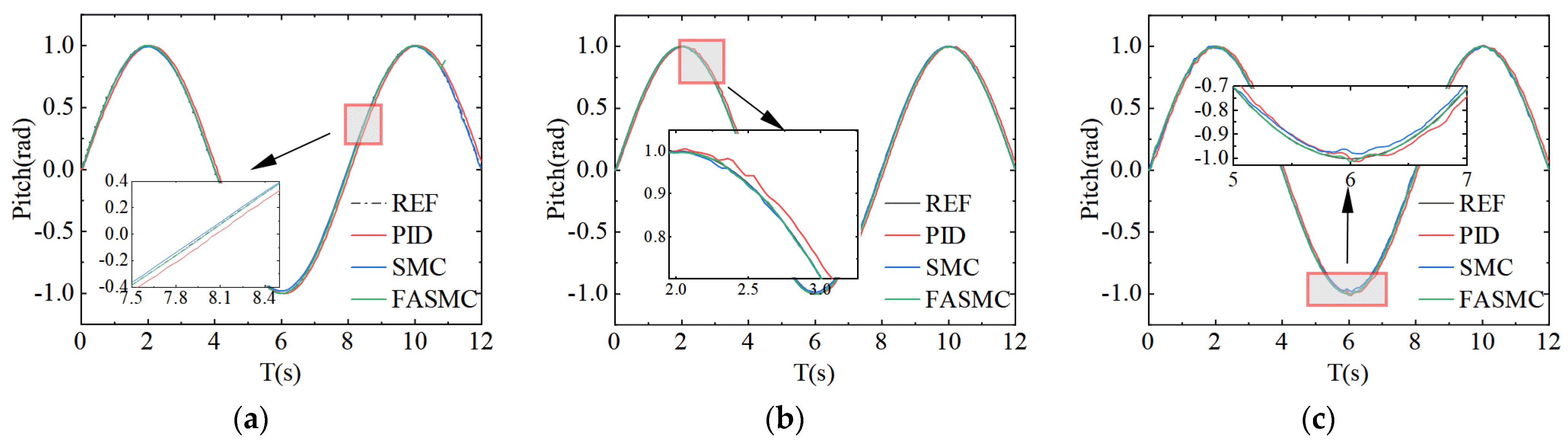
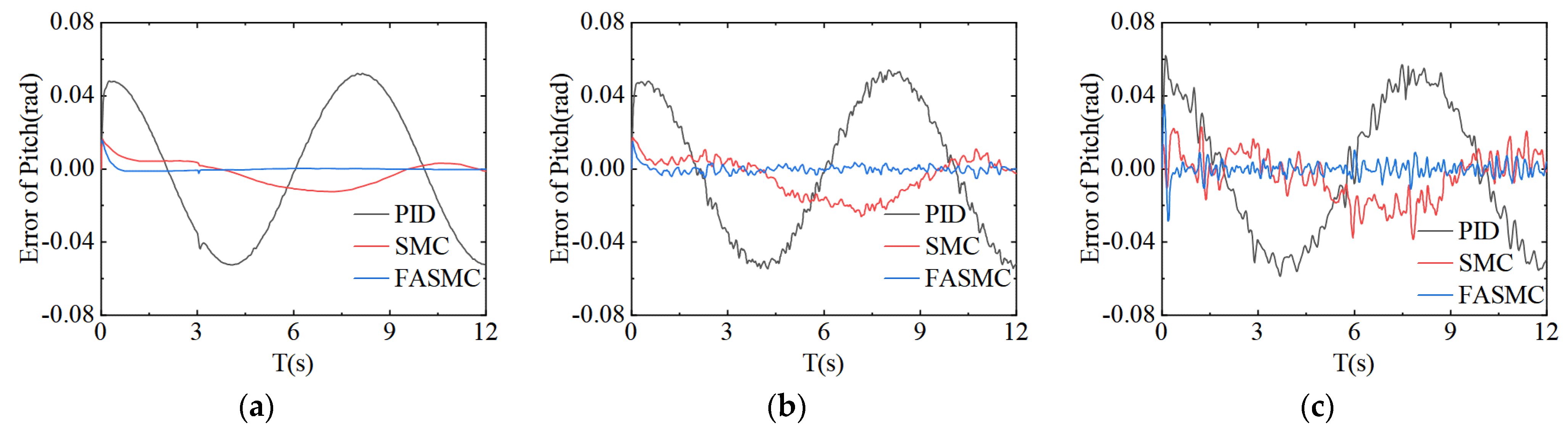
4. Simulation and Analysis
5. Conclusions
- (1)
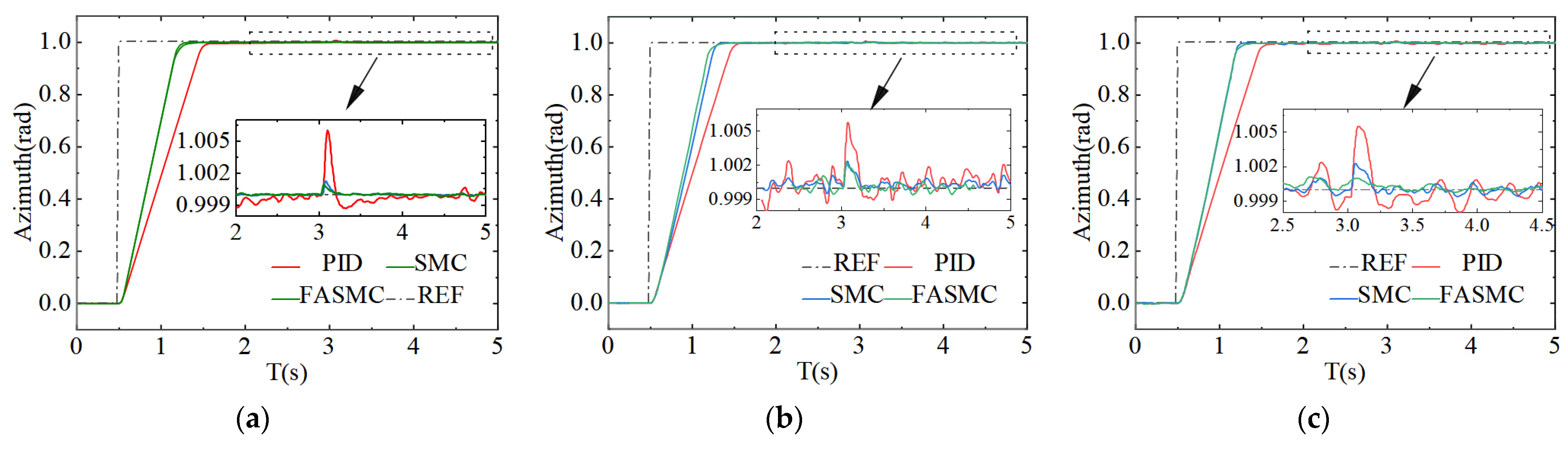
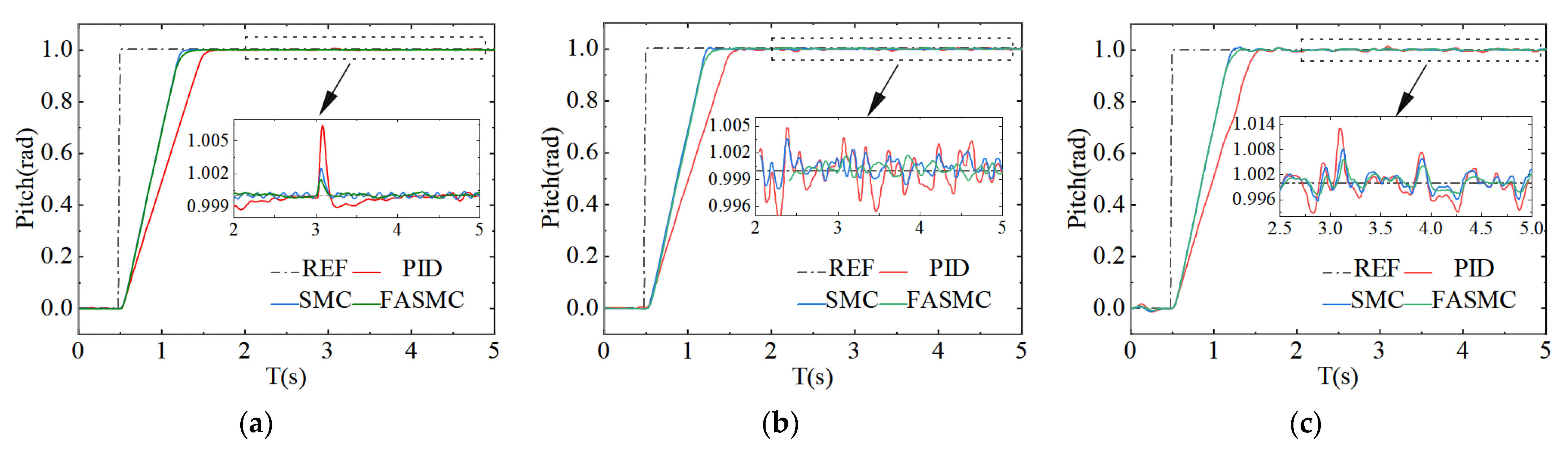
- FASM demonstrates superior robustness and accuracy in commanding signals. In comparison to PID control, the adjustment time was reduced by 30% and compared to SMC, it was reduced by 6.2%. Additionally, the steady-state error and shock disturbance were decreased by 49% and 67%, respectively, in comparison to PID control and by 34% and 39%, respectively, in comparison to SMC.
- (2)
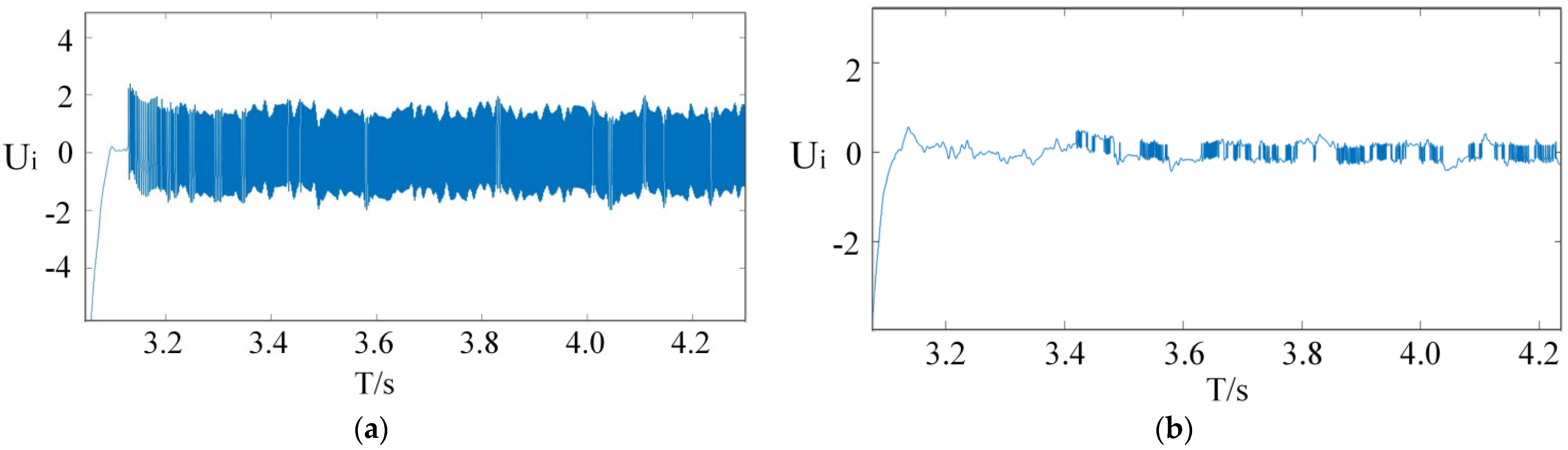
- FASMC significantly improved the chatter characteristics of SMC, reducing the frequency of chatter and decreasing the amplitude by 75% compared to SMC.
- (3)
- FASMC also significantly improved the tracking accuracy of MRLS, controlling the tracking error under F-level pavement excitation within 10 mils, resulting in a performance improvement of 74% over PID control and 50% over SMC control. The study found that under Class D and F pavements, pavement excitation exceeded impact disturbance as the main factor affecting accuracy.
Author Contributions
Funding
Data Availability Statement
Conflicts of Interest
References
- Rui, X.T.; Lu, Y.; Wang, G.; Chen, W.; Yun, L. Simulation and Test Methods of Launch Dynamics of Multiple Launch Rocket System; National Defence Industry Press: Beijing, China, 2003. [Google Scholar]
- Dziopa, Z.; Koruba, Z. The impact of launcher turret vibrations control on the rocket launch. Bull. Pol. Acad. Sci. Tech. Sci. 2015, 63, 717–728. [Google Scholar] [CrossRef]
- Li, B.; Rui, X.; Wang, G. A simplified dynamic model and control for a multiple launch rocket system. J. Vib. Control 2021, 28, 2288–2300. [Google Scholar] [CrossRef]
- Li, B.; Rui, X.; Tian, W.; Cui, G. Neural-network-predictor-based control for an uncertain multiple launch rocket system with actuator delay. Mech. Syst. Signal Process. 2020, 141, 106489. [Google Scholar] [CrossRef]
- Li, B.; Rui, X.; Wang, G.; Zhang, J.; Zhou, Q. On Modeling and Dynamics of a Multiple Launch Rocket System. Proc. Inst. Mech. Eng. Part G J. Aerosp. Eng. 2021, 235, 1664–1684. [Google Scholar] [CrossRef]
- Ding, Y.; Zhou, K.; He, L.; Zhang, J.; Yang, H. Dynamic Simulation and Experiment of Marching Small Unmanned Ground Vehicles with Small Arms. Arab. J. Sci. Eng. 2022, 79, 1–15. [Google Scholar] [CrossRef]
- Gu, L.; Rui, X.; Wang, G.; Yang, F.; Wei, M. A Novel Vibration Control System Applying Annularly Arranged Thrusters for Multiple Launch Rocket System in Launching Process. Shock Vib. 2020, 2020, 7040827. [Google Scholar] [CrossRef]
- Li, C.; Wang, X.; Sun, Q.; Yang, G. Adaptive Robust Control of Muzzle Vibration for Marching Tank Based on Disturbance Observer. In Proceedings of the 2022 International Conference on Advanced Robotics and Mechatronics (ICARM), Guilin, China, 9–11 July 2022; pp. 854–859. [Google Scholar]
- Cochran, J.E., Jr.; Gunnels, R.T.; McCutchen, R.K., Jr. Rocket Launchers as Passive Controllers (DTIC Document); U.S. Army Missile Command, Redstone Arsenal: Huntsville, AL, USA, 1981. [Google Scholar]
- Zhao, W.; Chen, G. Rocket passive control. Acta Armamentarii 1996, 17, 40–45. [Google Scholar]
- Wang, R.; Lu, B.; Hou, Y.; Gao, Q. Passivity-based control for rocket launcher position servo system based on improved active disturbance rejection technology. Adv. Mech. Eng. 2018, 10, 3. [Google Scholar] [CrossRef] [Green Version]
- Dokumaci, K.; Aydemir, M.T.; Salamci, M.U. Modeling, PID Control and Simulation of a Rocket Launcher System. In Proceedings of the 16th International Power Electronics and Motion Control Conference and Exposition, Antalya, Turkey, 21–24 September 2014. [Google Scholar]
- Hu, J.; Ma, D.; Guo, Y. Optimal PID Position Controller of Multi-Rocket Launcher Using Improved Elman Network. In Proceedings of the 8th World Congress on Intelligent Control and Automation, Jinan, China, 7–9 July 2010. [Google Scholar]
- Li, B.; Rui, X.; Zhou, Q. Study on simulation and experiment of control for multiple launch rocket system by computed torque method. Nonlinear Dyn. 2017, 91, 1639–1652. [Google Scholar] [CrossRef]
- Chen, F.; Ma, D.; Yang, F. Backstepping Sliding Mode Control for Rocket Launcher Alternating Current Servo System. Adv. Mater. Res. 2012, 490–495, 1387–1391. [Google Scholar] [CrossRef]
- Mohd Zaihidee, F.; Mekhilef, S.; Mubin, M. Robust Speed Control of PMSM Using Sliding Mode Control (SMC)—A Review. Energies 2019, 12, 9. [Google Scholar] [CrossRef] [Green Version]
- Mu, C.; He, H. Dynamic Behavior of Terminal Sliding Mode Control. IEEE Trans. Ind. Electron. 2018, 65, 3480–3490. [Google Scholar] [CrossRef]
- Tong, D.; Xu, C.; Chen, Q.; Zhou, W. Sliding mode control of a class of nonlinear systems. J. Frankl. Inst. 2020, 357, 1560–1581. [Google Scholar] [CrossRef]
- Yu, X.; Feng, Y.; Man, Z. Terminal Sliding Mode Control—An Overview. IEEE Open J. Ind. Electron. Soc. 2021, 2, 36–52. [Google Scholar] [CrossRef]
- Soon, C.C.; Ghazali, R.; Ghani, M.F.; Shern, C.M.; Sam, Y.M.; Has, Z. Chattering Analysis of an Optimized Sliding Mode Controller for an Electro-Hydraulic Actuator System. J. Robot. Control 2022, 3, 2. [Google Scholar] [CrossRef]
- Dong, H.; Yang, X.; Gao, H.; Yu, X. Practical Terminal Sliding-Mode Control and Its Applications in Servo Systems. IEEE Trans. Ind. Electron. 2023, 70, 752–761. [Google Scholar] [CrossRef]
- Feng, H.; Song, Q.; Ma, S.; Ma, W.; Yin, C.; Cao, D.; Yu, H. A New Adaptive Sliding Mode Controller Based on the RBF Neural Network for an Electro-Hydraulic Servo System. ISA Trans. 2022, 129, 472–484. [Google Scholar] [CrossRef]
- Vedrana, J.; Toni, V.; Tin, B.; Marinko, B. A Survey of Fuzzy Algorithms Used in Multi-Motor Systems Control. Electronics 2020, 9, 1788. [Google Scholar]
- Belman-Flores, J.M.; Rodríguez-Valderrama, D.A.; Ledesma, S.; García-Pabón, J.J.; Hernández, D.; Pardo-Cely, D.M. A Review on Applications of Fuzzy Logic Control for Refrigeration Systems. Appl. Sci. 2022, 12, 1302. [Google Scholar] [CrossRef]
- Li, Y.; Li, K.; Tong, S. An Observer-Based Fuzzy Adaptive Consensus Control Method for Nonlinear Multiagent Systems. IEEE Trans. Fuzzy Syst. 2022, 30, 4667–4678. [Google Scholar] [CrossRef]
- Baek, J.; Jin, M.; Han, S. A New Adaptive Sliding-Mode Control Scheme for Application to Robot Manipulators. IEEE Trans. Ind. Electron. 2016, 63, 3628–3637. [Google Scholar] [CrossRef]
- Efe, M.O. Fractional fuzzy adaptive sliding-mode control of a 2-DOF direct-drive robot arm. IEEE Trans Syst Man Cybern B Cybern 2008, 38, 1561–1570. [Google Scholar] [CrossRef] [PubMed]
- Moussaoui, S.; Boulkroune, A.; Vaidyanathan, S. Fuzzy Adaptive Sliding-Mode Control Scheme for Uncertain Underactuated Systems. In Advances and Applications in Nonlinear Control Systems; Springer: Berlin/Heidelberg, Germany, 2016; pp. 351–367. [Google Scholar]
- Liu, F.; Rui, X.; Yu, H.; Zhang, J.; Zhou, Q.; Zhu, W. Study on launch dynamics of the tank marching fire. J. Shanghai Jiaotong Univ. 2016, 21, 443–449. [Google Scholar] [CrossRef]
- Jin, T.; Yan, H.; Li, D. PID control for tank firing in motion. Ind. Control Comput. 2016, 7, 18–19. [Google Scholar]
- Purdy, D.; Khanal, B. An investigation into enhanced fire control systems for moving vehicles. In Proceedings of the 29th International Symposium on Ballistics, Edinburgh, UK, 9–13 May 2016; pp. 9–13. [Google Scholar]
- Huang, B.; Hsieh, C.; Golnaraghi, F.; Moallem, M. Development and optimization of an energy-regenerative suspension system under stochastic road excitation. J. Sound Vib. 2015, 357, 16–34. [Google Scholar] [CrossRef]
- Pillay, R.; Krishnan. Modeling, simulation, and analysis of permanent-magnet motor drives. I. The permanent-magnet synchronous motor drive. IEEE Trans. Ind. Appl. 1989, 25, 265–273. [Google Scholar] [CrossRef]
- Liu, Y.-C.; Laghrouche, S.; Depernet, D.; N’Diaye, A.; Djerdir, A.; Cirrincione, M. Super-twisting sliding-mode observer-based model reference adaptive speed control for PMSM drives. J. Frankl. Inst. 2023, 360, 985–1004. [Google Scholar] [CrossRef]
- Liu, Y.; Laghrouche, S.; Depernet, D.; Djerdir, A.; Cirrincione, M. Disturbance-Observer-Based Complementary Sliding-Mode Speed Control for PMSM Drives: A Super-Twisting Sliding-Mode Observer-Based Approach. IEEE J. Emerg. Sel. Top. Power Electron. 2020, 9, 5416–5428. [Google Scholar] [CrossRef]
- Nacer, H.; Boubekeur, M.; Mohcene, B.; Radhwane, S. Comparison Between Fuzzy and Non-fuzzy Ordinary If–Then Rule-Based Control for the Trajectory Tracking of a Differential Drive Robot. Int. J. Fuzzy Syst. 2022, 24, 3666–3687. [Google Scholar]
- Wang, J.; Rad, A.; Chan, P. Indirect adaptive fuzzy sliding mode control Part I: Fuzzy switching. Fuzzy Sets Syst. 2001, 122, 21–30. [Google Scholar] [CrossRef]
- Hu, Y.; Wang, H.; He, S.; Zheng, J.; Ping, Z.; Shao, K.; Cao, Z.; Man, Z. Adaptive tracking control of an electronic throttle valve based on recursive terminal sliding mode. IEEE Trans. Veh. Technol. 2021, 70, 251–262. [Google Scholar] [CrossRef]
- Kayacan, E. Sliding mode learning control of uncertain nonlinear systems with Lyapunov stability analysis. Trans. Inst. Meas. Control 2018, 41, 1750–1760. [Google Scholar] [CrossRef]













{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Road Grade | |||
|---|---|---|---|
| Upper Limit | Mean Value | Lower Limit | |
| A | 8 | 16 | 32 |
| D | 512 | 1024 | 2048 |
| F | 8192 | 16,384 | 32,768 |
| Parameter of PMSM | Value of Pitch/Azimuth |
|---|---|
| Inertia(converted to motor output shaft) (kg∙m2) | J = 3.569 × 10−3/4.369 × 10−2 |
| Electromagnetic torque coefficient (N∙m/A) | Kt = 1.11/1.34 |
| Damping coefficient (N∙m/s) | B = 3.34 × 10−3 |
| Stator resistor | RS = 2.875 |
| Winding inductance (H) | Ld = Lq = 8.5 × 10−3 |
| Rated current (A) | Ie = 6.4/9.9 |
| Rated rotation speed (RPM) | n = 3000/2500 |
| Maximum allowable current (A) | Imax = 12.8/19.8 |
| Polar logarithm | Pn = 4 |
| PID | SMC | FASMC | ||||||||
|---|---|---|---|---|---|---|---|---|---|---|
| Kp | Ki | Kd | c | k | ε | D | C1 | C2 | ||
| 520 | 0.05 | 13 | 30 | 15 | 0.05 | 15 | 0.01 | 15 | 200 | 0.5 |
| Class of Road | Direction | Adjustment Time (s) | Maximum Steady State Error (mil) | Impact Disturbance (mil) | ||||||
|---|---|---|---|---|---|---|---|---|---|---|
| A | D | F | A | D | F | A | D | F | ||
| PID | Pitch | 1.03 | 1.10 | 1.15 | 0.67 | 4.78 | 9.55 | 4.78 | 4.82 | 14.30 |
| Azimuth | 1.01 | 1.03 | 1.08 | 0.47 | 2.87 | 7.64 | 5.73 | 5.84 | 8.62 | |
| SMC | Pitch | 0.73 | 0.78 | 0.82 | 0.12 | 4.05 | 7.35 | 2.35 | 2.30 | 7.64 |
| Azimuth | 0.72 | 0.75 | 0.80 | 0.08 | 1.53 | 2.05 | 1.85 | 2.03 | 2.32 | |
| FASMC | Pitch | 0.71 | 0.75 | 0.77 | 0.10 | 3.65 | 4.86 | 2.05 | 2.20 | 4.65 |
| Azimuth | 0.71 | 0.74 | 0.75 | 0.07 | 1.35 | 2.02 | 1.73 | 2.01 | 1.05 | |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2023 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Qu, P.; Sun, Z.; Li, Q.; Zhang, J.; Liu, P.; Zhou, D. Dynamic Simulation of Multiple Launch Rocket System Marching Fire Based on the Fuzzy Adaptive Sliding Mode Control. Machines 2023, 11, 427. https://doi.org/10.3390/machines11040427
Qu P, Sun Z, Li Q, Zhang J, Liu P, Zhou D. Dynamic Simulation of Multiple Launch Rocket System Marching Fire Based on the Fuzzy Adaptive Sliding Mode Control. Machines. 2023; 11(4):427. https://doi.org/10.3390/machines11040427
Chicago/Turabian StyleQu, Pu, Zhiqun Sun, Qiang Li, Jiabo Zhang, Pengzhan Liu, and Dongmo Zhou. 2023. "Dynamic Simulation of Multiple Launch Rocket System Marching Fire Based on the Fuzzy Adaptive Sliding Mode Control" Machines 11, no. 4: 427. https://doi.org/10.3390/machines11040427
APA StyleQu, P., Sun, Z., Li, Q., Zhang, J., Liu, P., & Zhou, D. (2023). Dynamic Simulation of Multiple Launch Rocket System Marching Fire Based on the Fuzzy Adaptive Sliding Mode Control. Machines, 11(4), 427. https://doi.org/10.3390/machines11040427