
A Simple Semi-Analytical Method for Solving Axisymmetric Contact Problems Involving Bonded and Unbonded Layers of Arbitrary Thickness


Abstract
:1. Introduction
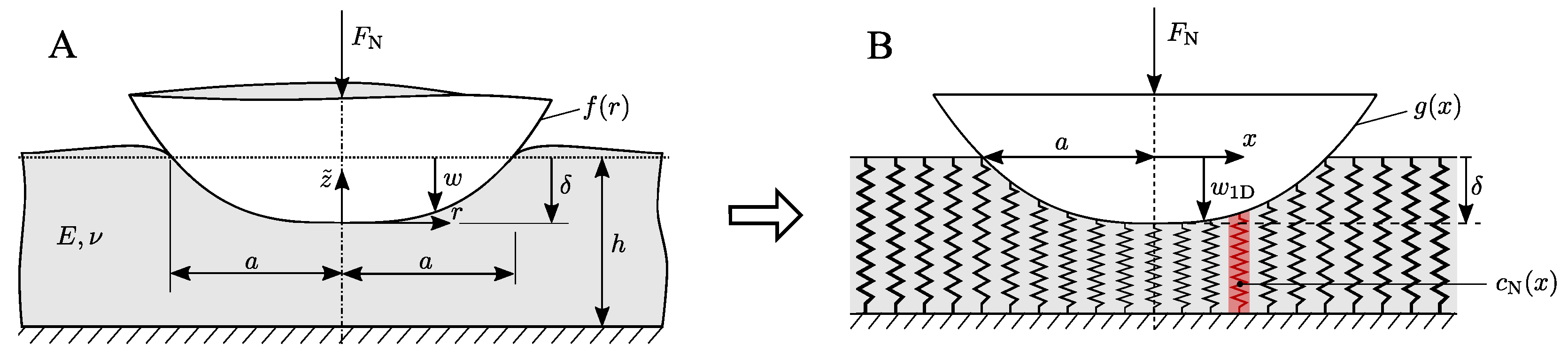
2. MDR Framework
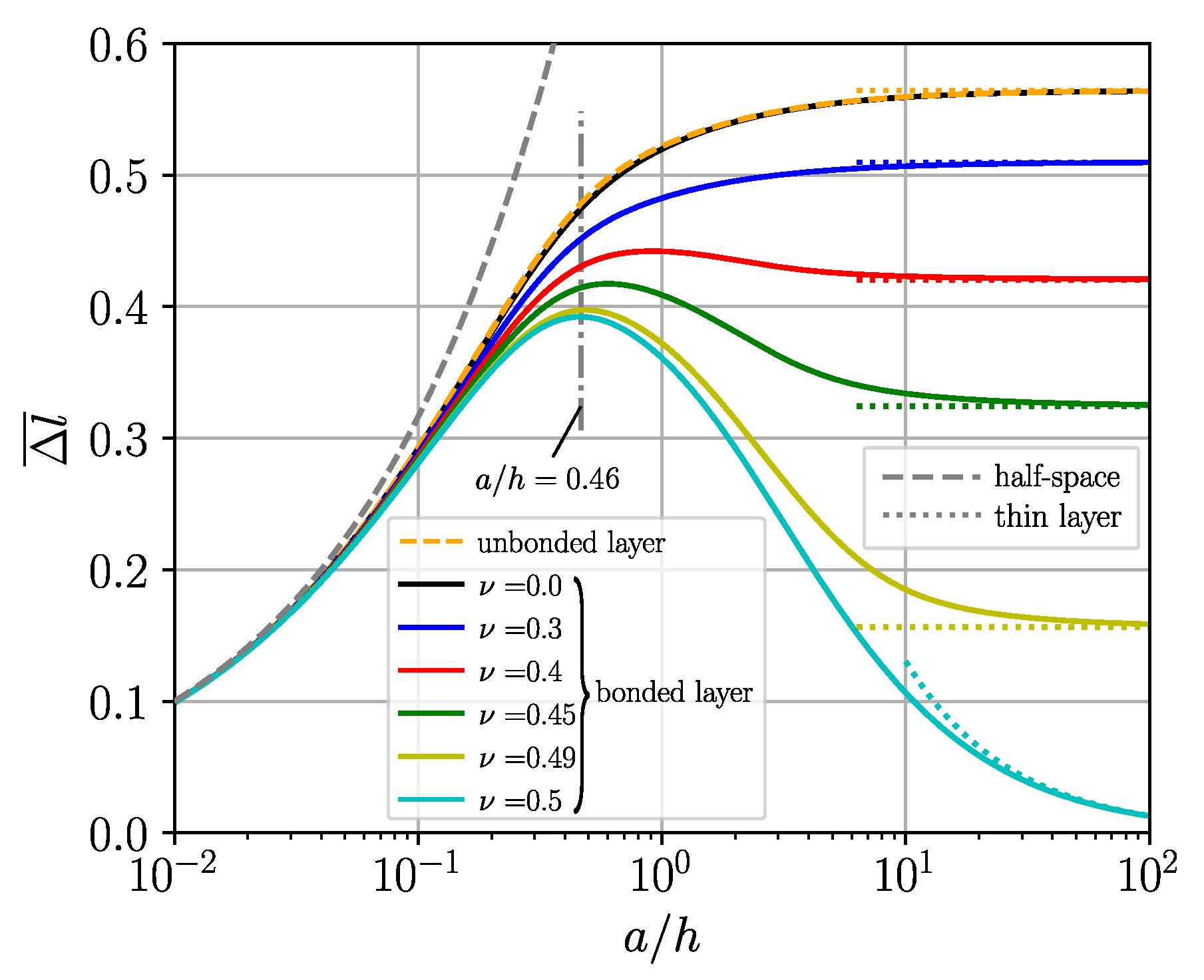
2.1. Asymptotic Cases
2.1.1. The Elastic Half-Space
2.1.2. The Compressible Bonded Thin Layer
2.1.3. The Incompressible Bonded Thin Layer
2.1.4. The Unbonded Thin Layer
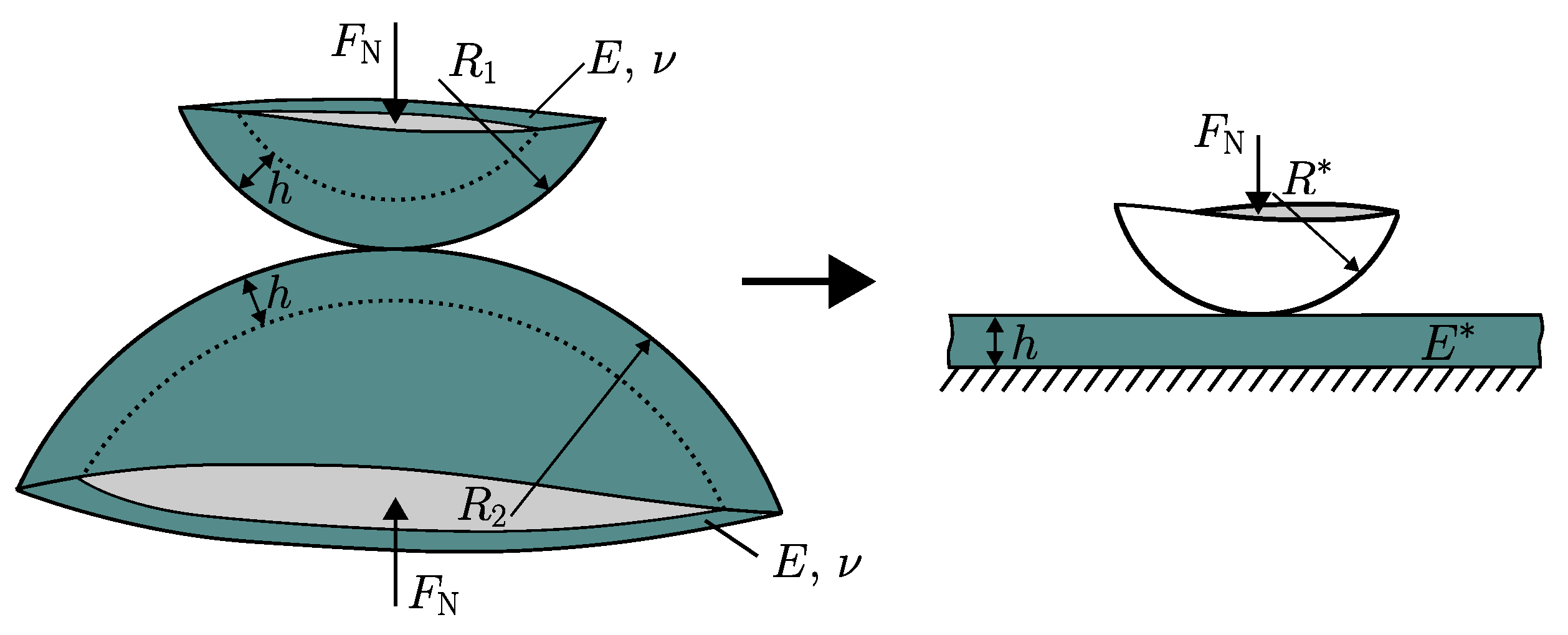
2.2. Contact of Two Coated Rigid Bodies with Curved Surfaces
3. Numerical Solution of Flat Punch Indentations Using FFT-Based BEM
3.1. FFT-Based BEM for Bonded and Unbonded Elastic Layers
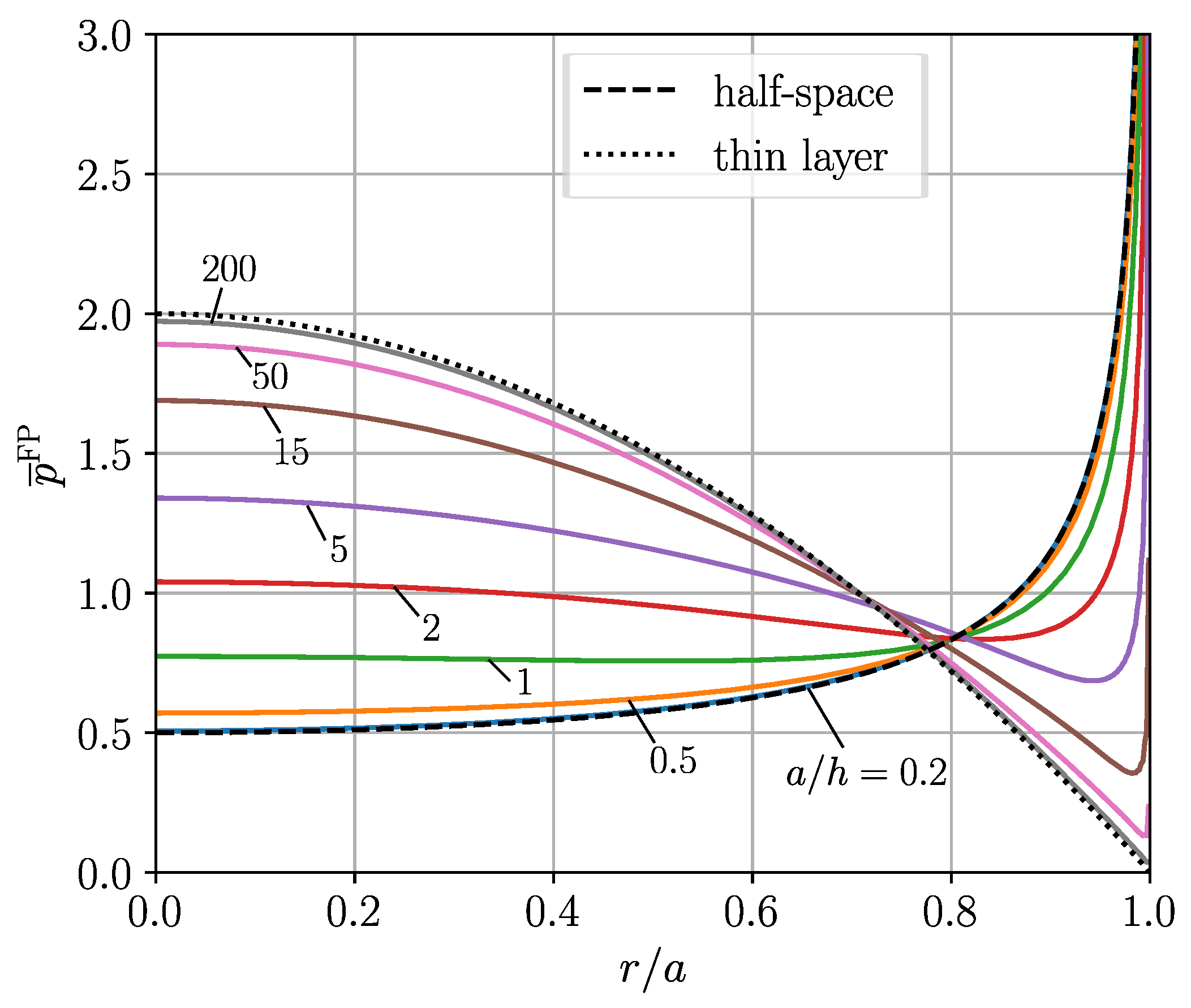
3.2. Contact Stiffness and Pressure under a Cylindrical Flat Punch
4. Case Studies
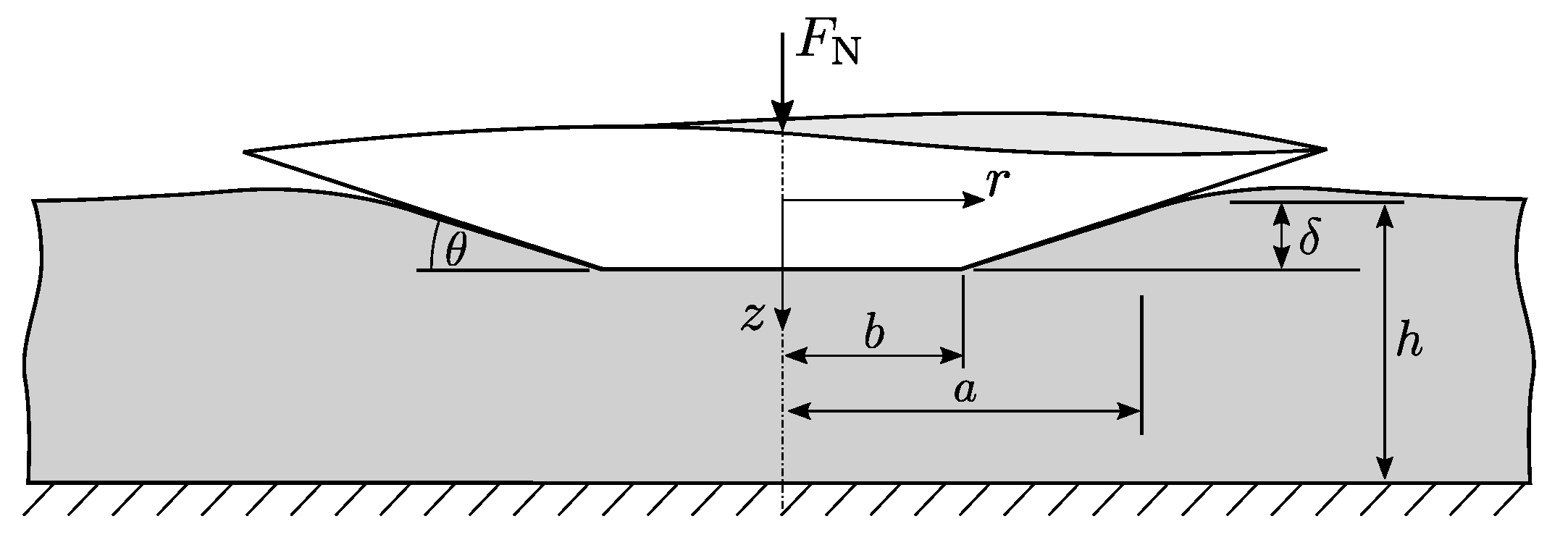
4.1. Indentation by a Truncated Cone
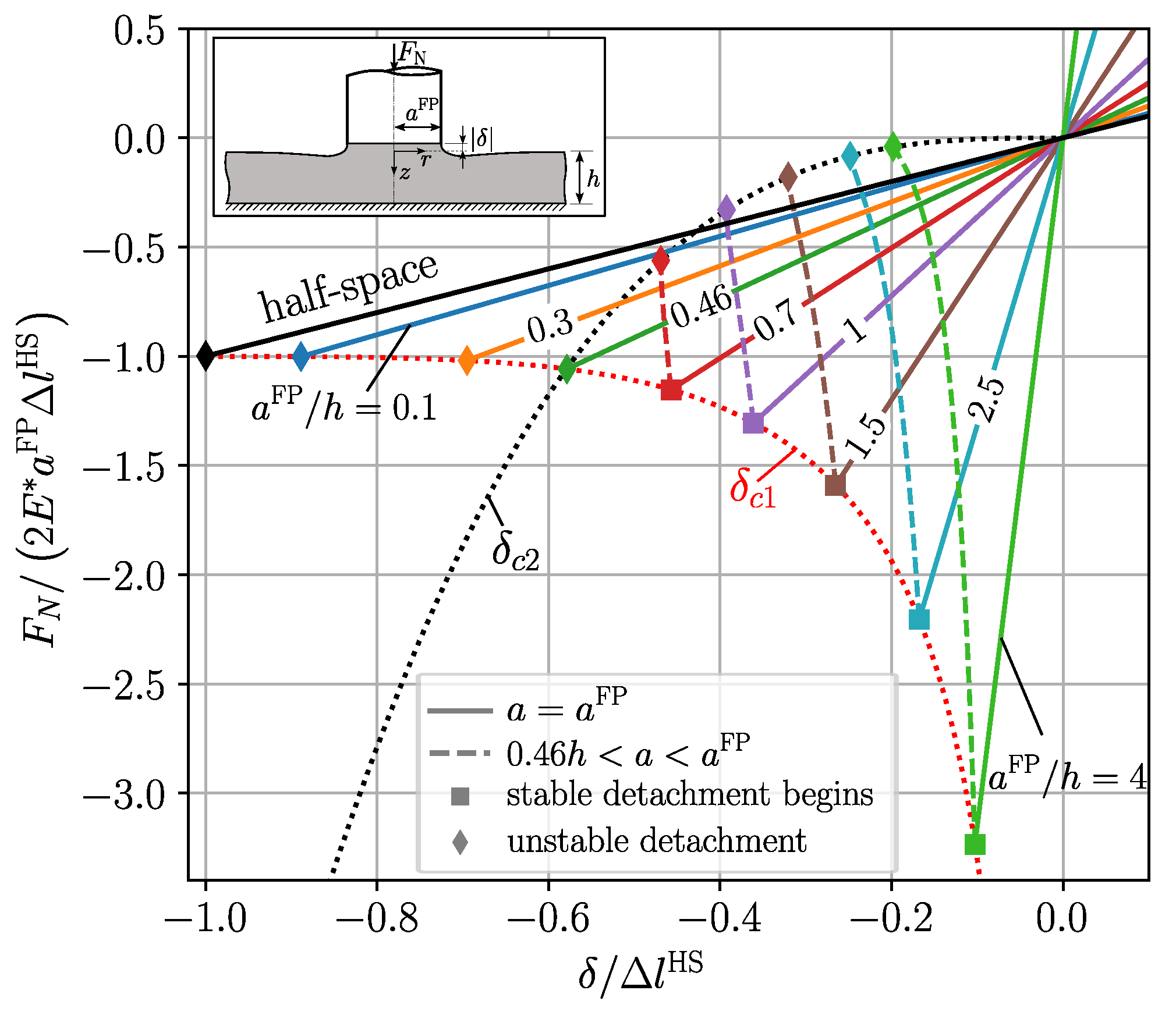
4.2. Adhesive Detachment of a Cylindrical Flat Punch from an Elastic Layer
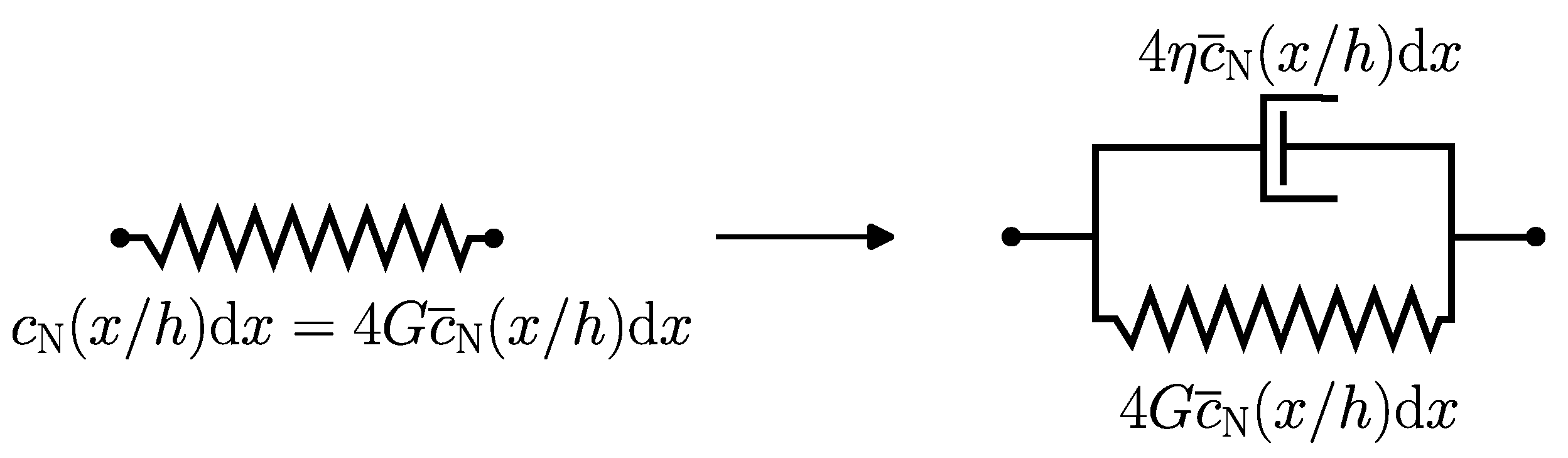
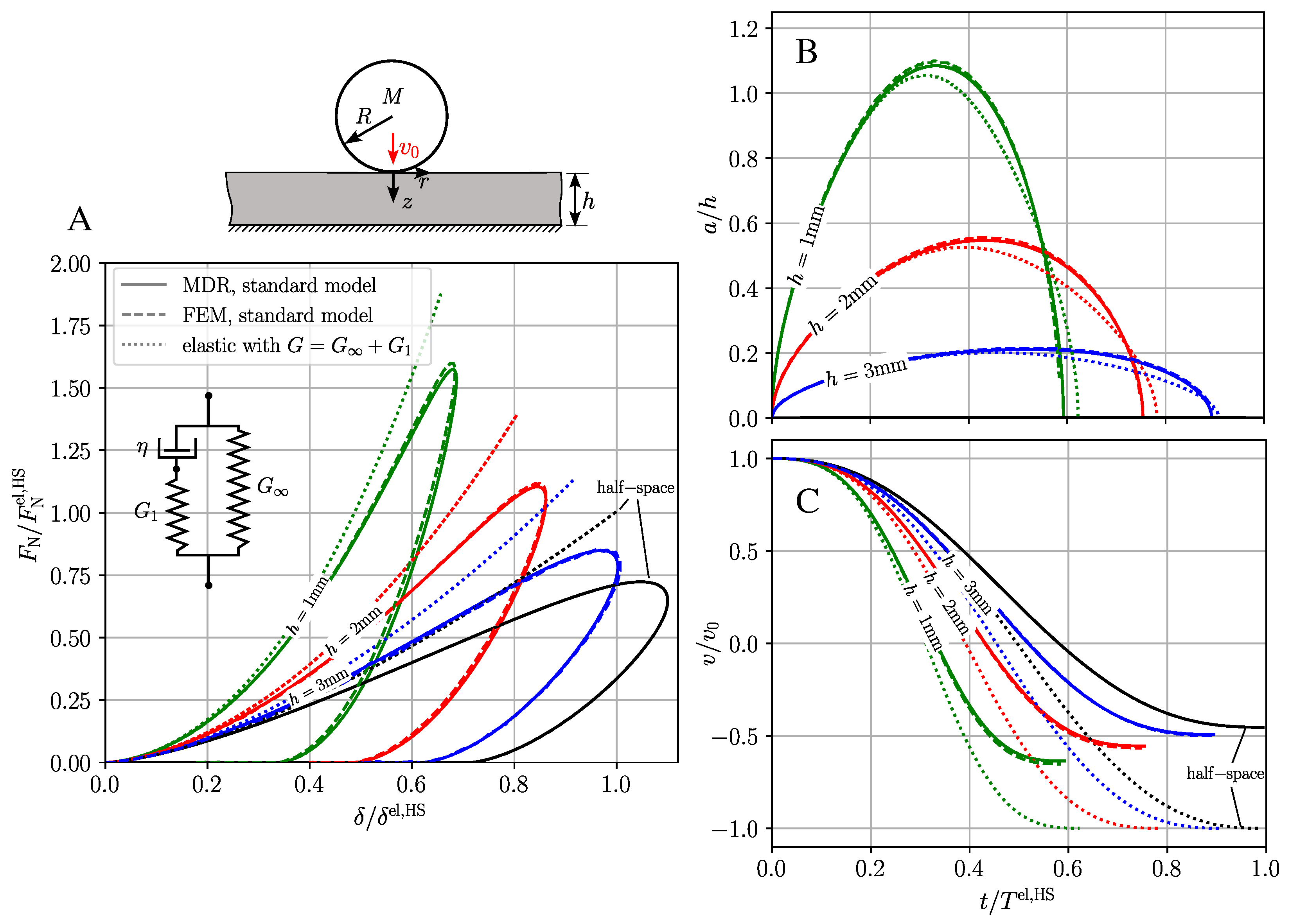
4.3. Quasi-Static Impact with an Incompressible Viscoelastic Layer
5. Conclusions
Supplementary Materials
Funding
Data Availability Statement
Acknowledgments
Conflicts of Interest
Abbreviations
| FP | Cylindrical flat punch |
| P | Paraboloid |
| MDR | Method of dimensionality reduction |
| BEM | Boundary element method |
| FEM | Finite element method |
| COR | Coefficient of restitution |
| HS | Half-space |
| TL | Thin layer |
| r | Radial coordinate |
| Dimensionless radial coordinate | |
| f | Indenter profile |
| Dimensionless indenter profile | |
| x | MDR coordinate |
| Dimensionless MDR coordinate | |
| a | Contact radius |
| Dimensionless contact radius | |
| Spring displacement | |
| Dimensionless spring displacement | |
| Contact stiffness | |
| Dimensionless contact stiffness | |
| Spring stiffness | |
| Dimensionless spring stiffness | |
| Pressure under FP (unit indentation) | |
| Dimensionless pressure under FP | |
| g | MDR profile |
| h, , , | Layer thickness |
| w | Surface displacement |
| , | Indentation depth |
| Normal force | |
| R, , , | Radius of curvature |
| FP displacement (unit indentation) | |
| p | Contact pressure |
| E | Elastic modulus |
| Poisson’s ratio | |
| Effective elastic modulus | |
| Thin layer modulus | |
| Wave vector | |
| Displacement vector | |
| Fundamental solution | |
| Compliance matrix | |
| m, | Dimensionless stiffness parameters |
| b | Geom. parameter truncated cone |
| Angle of truncated cone | |
| Work of adhesion | |
| Max. spring elongation | |
| Dimensionless spring elongation | |
| Viscosity | |
| G, , | Shear modulus |
| indentation velocity | |
| Coefficient of restitution | |
| M | Mass of indenter |
| D | Damping ratio |
| Reaction force viscoelastic element | |
| Element distance | |
| Displacement of inner element point | |
| Velocity of inner element point | |
| , | Defining parameter for impact |
References
- Meijers, P. The contact problem of a rigid cylinder on an elastic layer. Appl. Sci. Res. 1968, 18, 353–383. [Google Scholar] [CrossRef]
- Jaffar, M. Asymptotic behaviour of thin elastic layers bonded and unbonded to a rigid foundation. Int. J. Mech. Sci. 1989, 31, 229–235. [Google Scholar] [CrossRef]
- Eberhardt, A.W.; Lewis, J.L.; Keer, L.M. Normal Contact of Elastic Spheres with Two Elastic Layers as a Model of Joint Articulation. J. Biomech. Eng. 1991, 113, 410–417. [Google Scholar] [CrossRef] [PubMed]
- Espino, D.M.; Shepherd, D.E.; Hukins, D.W. Viscoelastic properties of bovine knee joint articular cartilage: Dependency on thickness and loading frequency. BMC Musculoskelet. Disord. 2014, 15, 205. [Google Scholar] [CrossRef]
- Argatov, I.; Daniels, A.; Mishuris, G.; Ronken, S.; Wirz, D. Accounting for the thickness effect in dynamic spherical indentation of a viscoelastic layer: Application to non-destructive testing of articular cartilage. Eur. J. -Mech.-A/Solids 2013, 37, 304–317. [Google Scholar] [CrossRef] [Green Version]
- Li, Q.; Lyashenko, I.; Pohrt, R.; Popov, V. Influence of a Soft Elastic Layer on Adhesion of Rough Surfaces. In Contact Problems for Soft, Biological and Bioinspired Materials; Springer: Berlin/Heidelberg, Germany, 2022; pp. 93–102. [Google Scholar]
- Webber, R.E.; Shull, K.R.; Roos, A.; Creton, C. Effects of geometric confinement on the adhesive debonding of soft elastic solids. Phys. Rev. E—Stat. Phys. Plasmas Fluids Relat. Interdiscip. Top. 2003, 68, 11. [Google Scholar] [CrossRef] [PubMed]
- Li, Q.; Pohrt, R.; Lyashenko, I.A.; Popov, V.L. Boundary element method for nonadhesive and adhesive contacts of a coated elastic half-space. Proc. Inst. Mech. Eng. Part J J. Eng. Tribol. 2020, 234, 73–83. [Google Scholar] [CrossRef] [Green Version]
- Pohrt, R.; Popov, V. Adhesive contact simulation of elastic solids using local mesh-dependent detachment criterion in Boundary Elements Method. Facta Univ.—Ser. Mech. Eng. 2015, 13, 3–10. [Google Scholar]
- Lebedev, N.N.; Ufliand, I.S. Axisymmetric contact problem for an elastic layer. J. Appl. Math. Mech. 1958, 22, 442–450. [Google Scholar] [CrossRef]
- Hayes, W.C.; Keer, L.M.; Herrmann, G.; Mockros, L.F. A mathematical analysis for indentation tests of articular cartilage. J. Biomech. 1972, 5, 541–551. [Google Scholar] [CrossRef]
- Argatov, I. An analytical solution of the rebound indentation problem for an isotropic linear viscoelastic layer loaded with a spherical punch. Acta Mech. 2012, 223, 1441–1453. [Google Scholar] [CrossRef]
- Constantinescu, A.; Korsunsky, A.M.; Pison, O.; Oueslati, A. Symbolic and numerical solution of the axisymmetric indentation problem for a multilayered elastic coating. Int. J. Solids Struct. 2013, 50, 2798–2807. [Google Scholar] [CrossRef]
- Argatov, I.; Heß, M.; Popov, V.L. The extension of the method of dimensionality reduction to layered elastic media. ZAMM Z. Fur Angew. Math. Und Mech. 2018, 98, 622–634. [Google Scholar] [CrossRef]
- Popov, V.L.; Heß, M. Method of Dimensionality Reduction in Contact Mechanics and Friction; Springer: Berlin/Heidelberg, Germany, 2015. [Google Scholar]
- Heß, M. On the reduction method of dimensionality: The exact mapping of axisymmetric contact problems with and without adhesion. Phys. Mesomech. 2012, 15, 264–269. [Google Scholar] [CrossRef]
- Argatov, I. Mathematical modeling of linear viscoelastic impact: Application to drop impact testing of articular cartilage. Tribol. Int. 2013, 63, 213–225. [Google Scholar] [CrossRef] [Green Version]
- Heß, M. A simple method for solving adhesive and non-adhesive axisymmetric contact problems of elastically graded materials. Int. J. Eng. Sci. 2016, 104, 20–33. [Google Scholar] [CrossRef]
- Efimov, A.B.; Vorob’ev, V.N. A contact problem in the theory of elasticity with a single controlling parameter. J. Eng. Phys. 1972, 23, 1573–1587. [Google Scholar] [CrossRef]
- Barber, J. Contact Mechanics; Solid Mechanics and Its Applications; Springer International Publishing: Berlin/Heidelberg, Germany, 2018. [Google Scholar]
- Hannah, M. Contact stress and deformation in a thin elastic layer. Q. J. Mech. Appl. Math. 1951, 4, 94–105. [Google Scholar] [CrossRef]
- Aleksandrov, V. On the approximate solution of some integral equations of the theory of elasticity and mathematical physics. J. Appl. Math. Mech. 1967, 31, 1122–1136. [Google Scholar] [CrossRef]
- Willert, E. Stoßprobleme in Physik, Technik und Medizin; Springer: Berlin/Heidelberg, Germany, 2020. [Google Scholar] [CrossRef]
- Popov, V.L.; Heß, M.; Willert, E. Handbook of Contact Mechanics: Exact Solutions of Axisymmetric Contact Problems; Springer: Berlin/Heidelberg, Germany, 2019; pp. 1–347. [Google Scholar] [CrossRef] [Green Version]
- Argatov, I.I.; Popov, V.L. Rebound indentation problem for a viscoelastic half-space and axisymmetric indenter—Solution by the method of dimensionality reduction. ZAMM Z. Fur Angew. Math. Und Mech. 2016, 96, 956–967. [Google Scholar] [CrossRef] [Green Version]
- Willert, E.; Kusche, S.; Popov, V. The influence of viscoelasticity on velocity-dependent restitutions in the oblique impact of spheres. Facta Univ.—Ser. Mech. Eng. 2017, 15, 269–284. [Google Scholar] [CrossRef]
- Forsbach, F. Stress Tensor and Gradient of Hydrostatic Pressure in the Half-Space Beneath Axisymmetric Bodies in Normal and Tangential Contact. Front. Mech. Eng. 2020, 6, 39. [Google Scholar] [CrossRef]
- Popov, V.L. An Approximate Solution for the Contact Problem of Profiles Slightly Deviating from Axial Symmetry. Symmetry 2022, 14, 390. [Google Scholar] [CrossRef]













{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Norm. Contact Stiffness | for a Paraboloid | |
|---|---|---|
| Half-space | 1 | |
| Bonded thin layer () | ||
| Bonded thin layer () | ||
| Unbonded thin layer | ||
| General layer |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2023 by the author. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Forsbach, F. A Simple Semi-Analytical Method for Solving Axisymmetric Contact Problems Involving Bonded and Unbonded Layers of Arbitrary Thickness. Machines 2023, 11, 474. https://doi.org/10.3390/machines11040474
Forsbach F. A Simple Semi-Analytical Method for Solving Axisymmetric Contact Problems Involving Bonded and Unbonded Layers of Arbitrary Thickness. Machines. 2023; 11(4):474. https://doi.org/10.3390/machines11040474
Chicago/Turabian StyleForsbach, Fabian. 2023. "A Simple Semi-Analytical Method for Solving Axisymmetric Contact Problems Involving Bonded and Unbonded Layers of Arbitrary Thickness" Machines 11, no. 4: 474. https://doi.org/10.3390/machines11040474
APA StyleForsbach, F. (2023). A Simple Semi-Analytical Method for Solving Axisymmetric Contact Problems Involving Bonded and Unbonded Layers of Arbitrary Thickness. Machines, 11(4), 474. https://doi.org/10.3390/machines11040474