


An Inverse Kinematics Approach for the Analysis and Active Control of a Four-UPR Motion-Compensated Platform for UAV–ASV Cooperation



Abstract
:1. Introduction
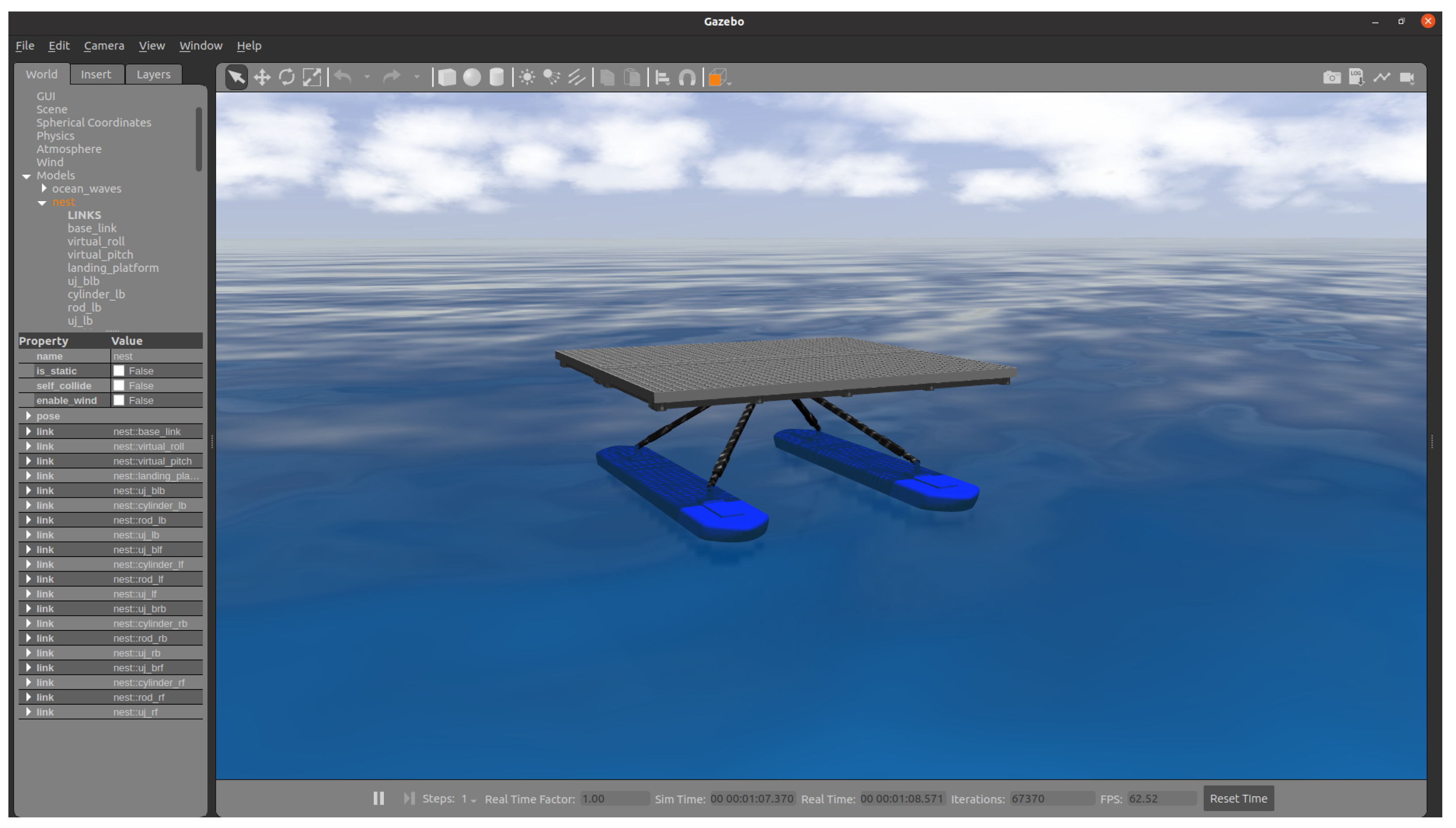
2. Platform Description
2.1. Problem Statement
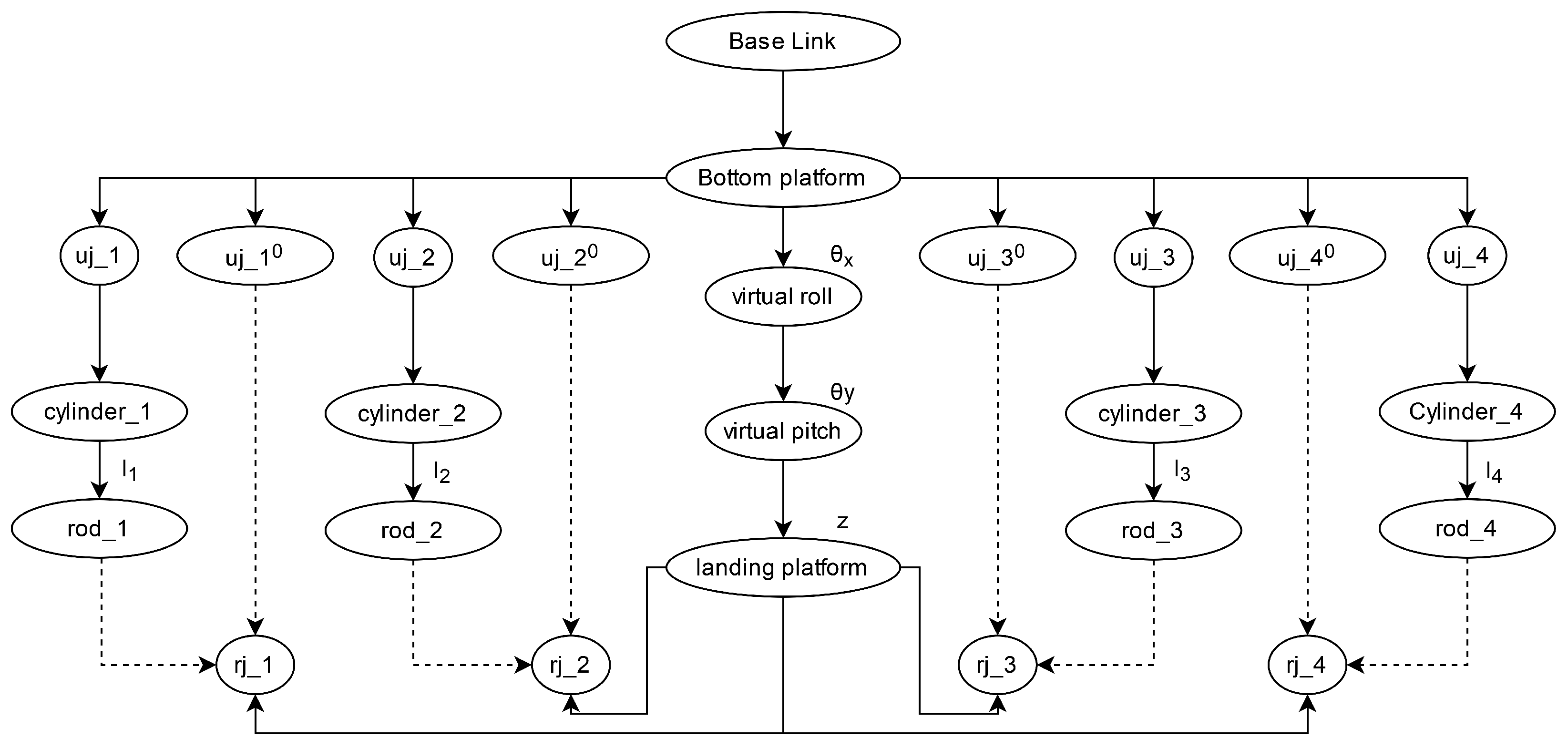
2.2. Degree of Freedom Estimation
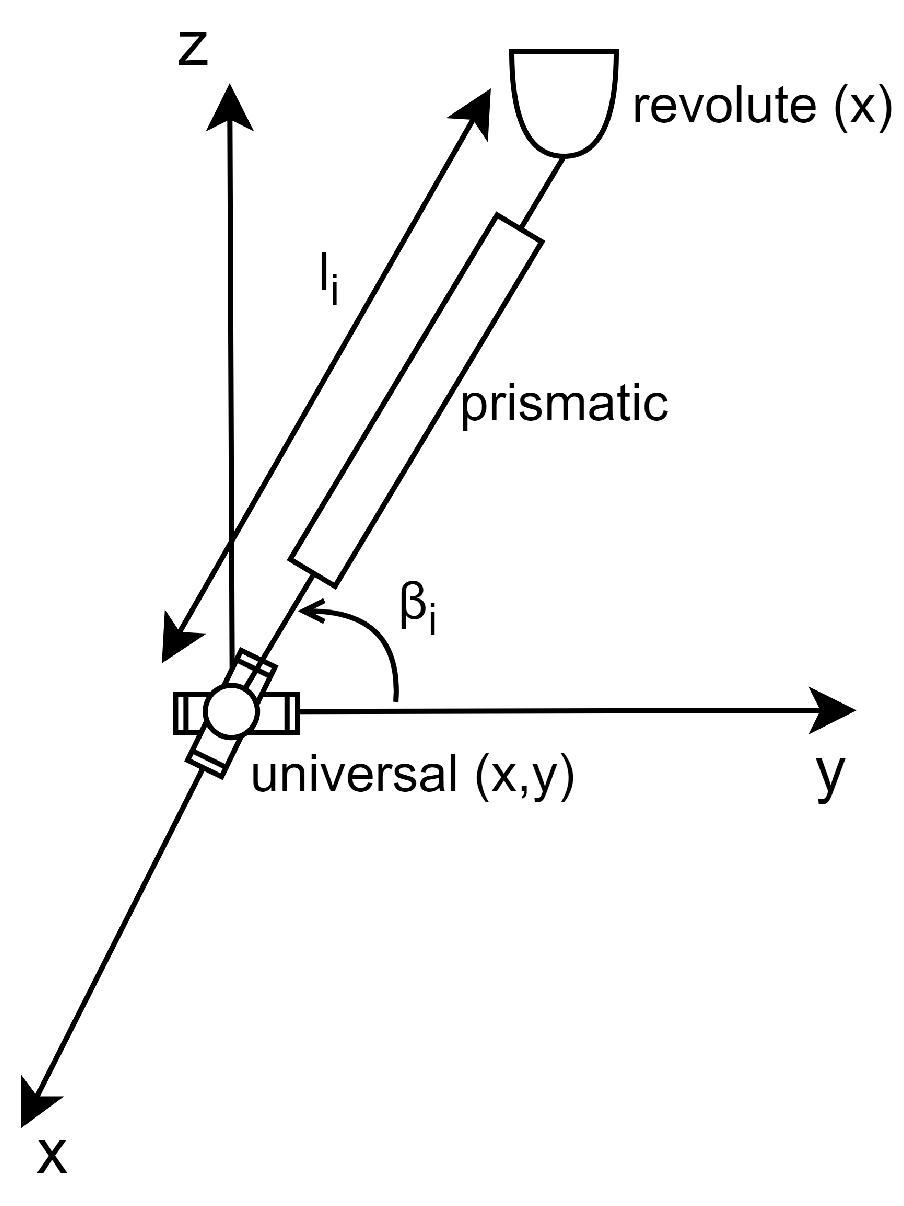
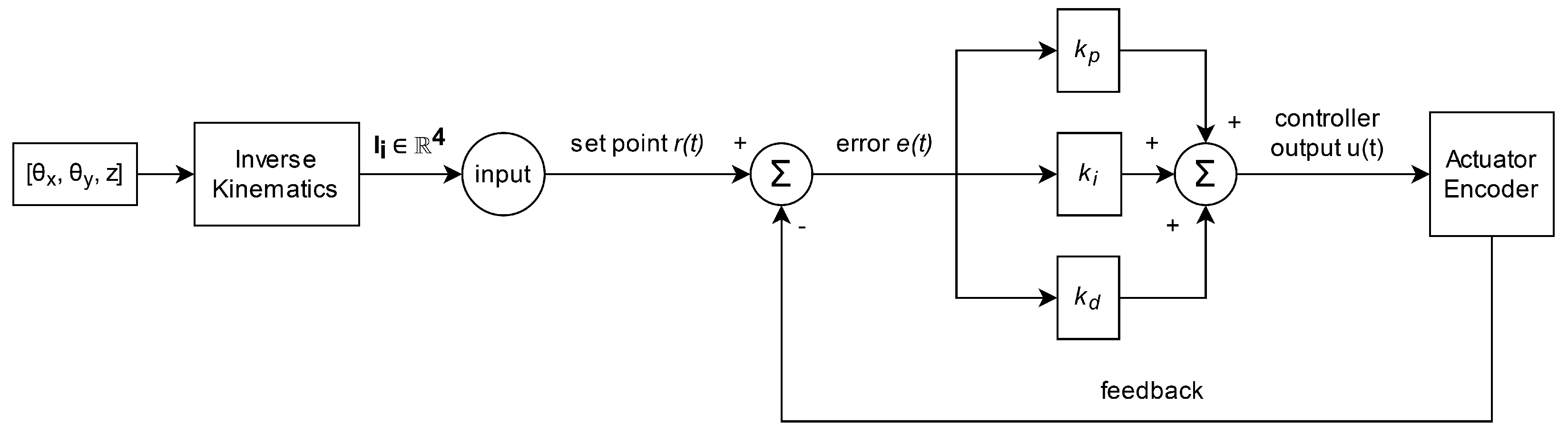
3. Inverse Kinematics
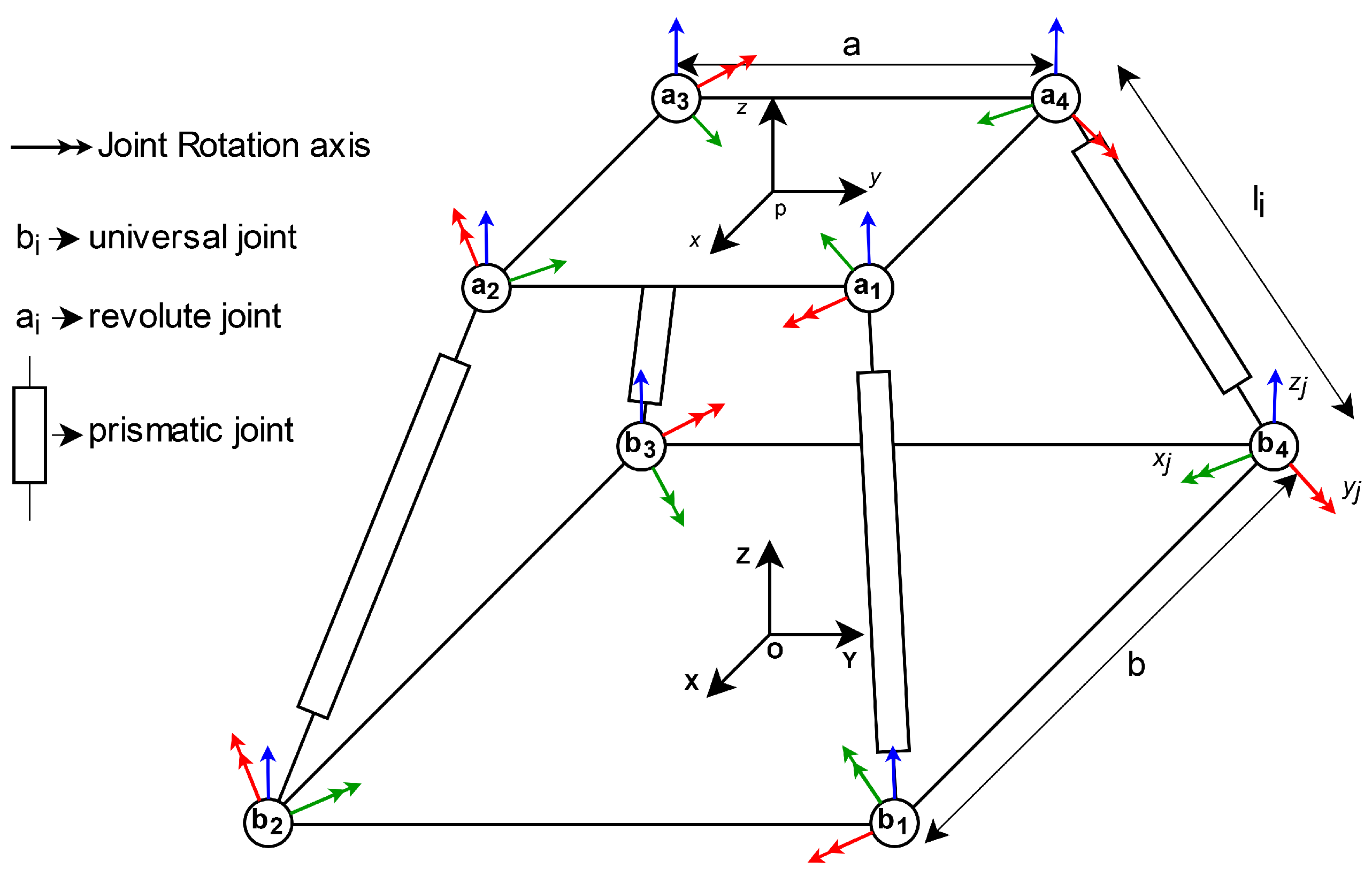
- Side a of the top platform, which denotes the position of the top joints. Smaller values of a mean more angular movement is achieved for shorter strokes, which can be explored to compensate for slower linear actuators. On the other hand, small values of a can lead to some instability regarding the stiffness of the mobile platform.
- Side b of the base platform, which denotes the position of the bottom joints. By distancing the bottom joints from one another, it is expected that the mechanism is more stable for harsher dynamic conditions. However, the steepness of the linear actuators also influences the angular speed of the mobile platform.
- Position along the Z-axis. This design parameter is adaptable even after construction, as it depends entirely on the linear actuator’s stroke position. The major influence of this parameter is on the joints and collision limits of the mobile platform, and the position of the centre of mass of the mechanism.
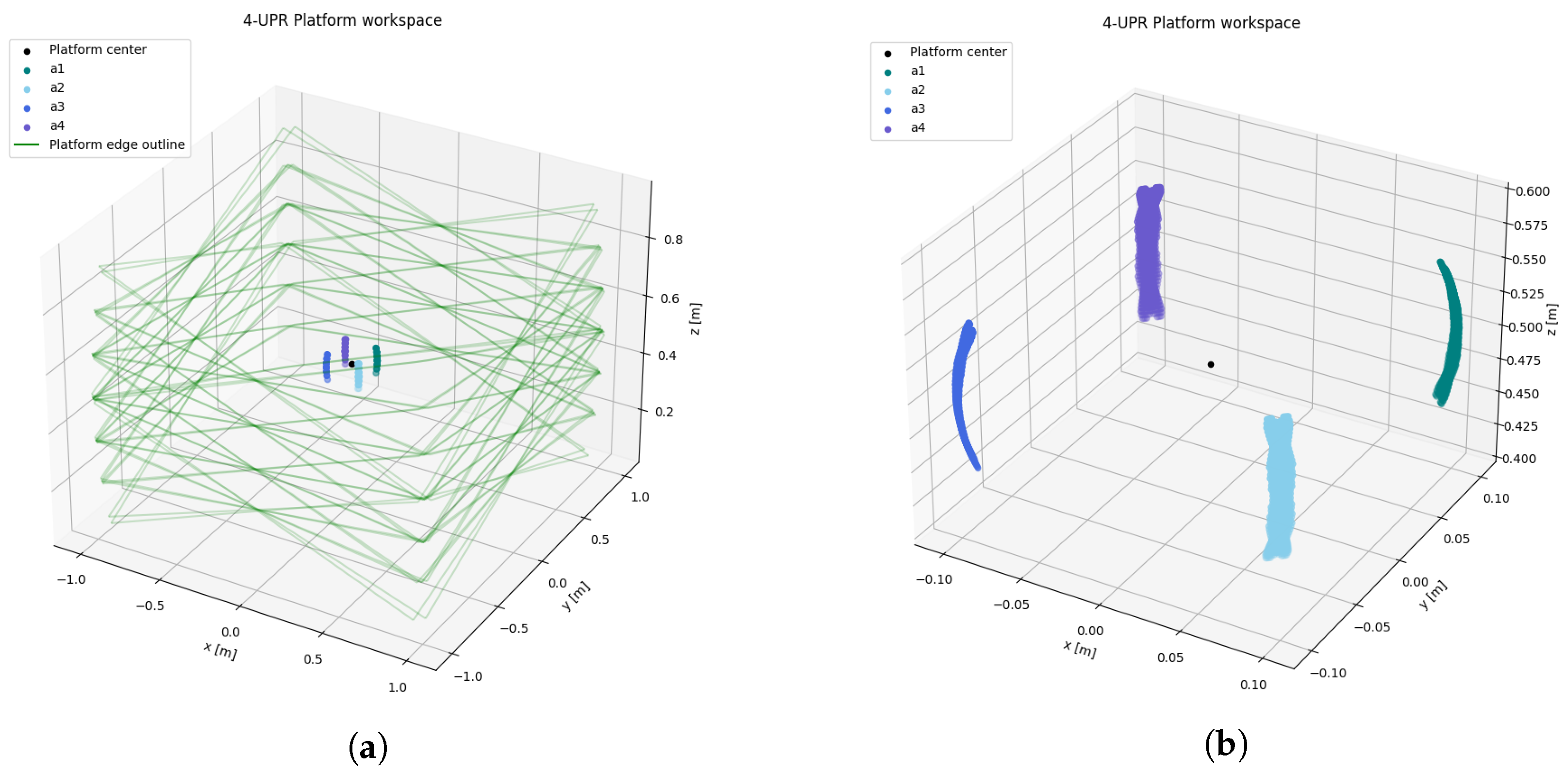
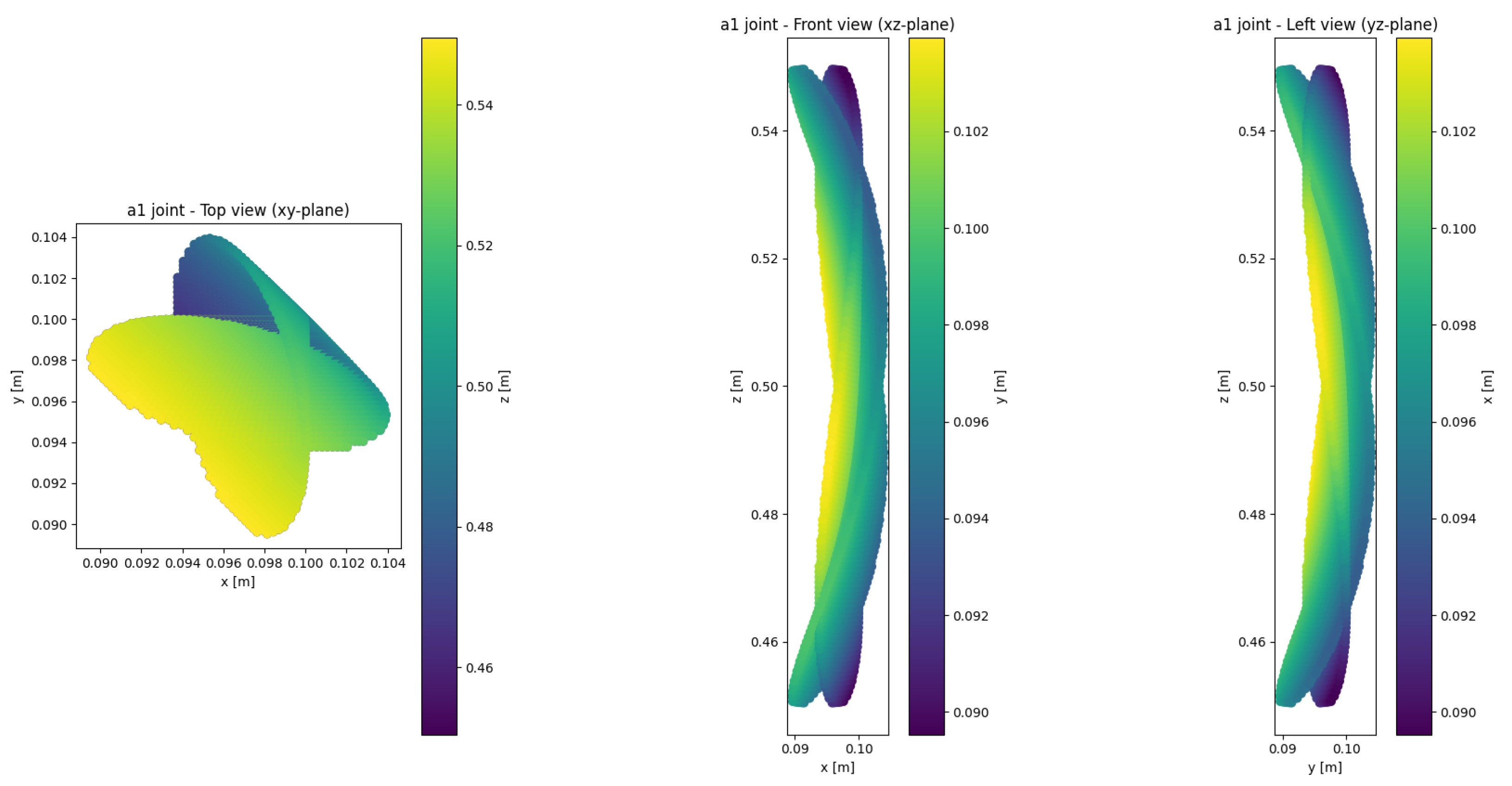
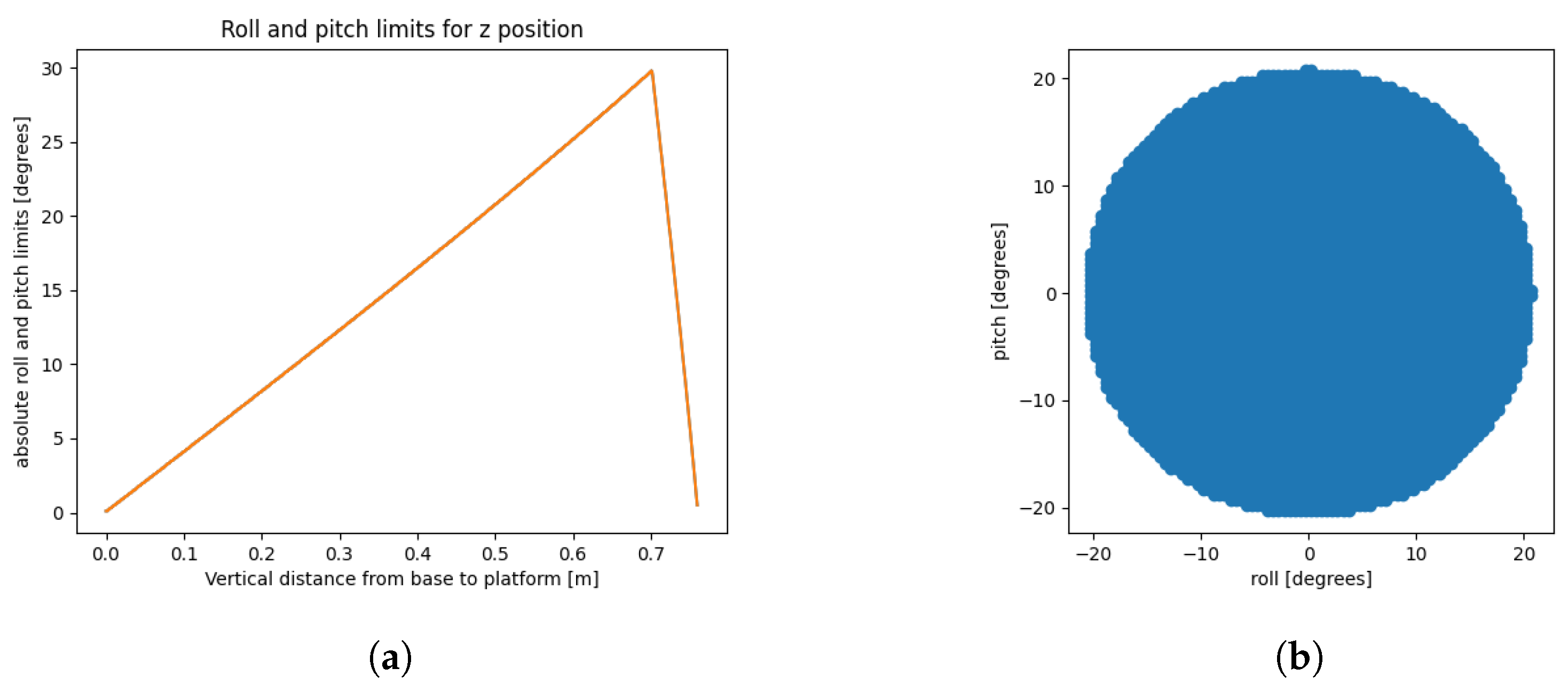
4. Workspace Analysis
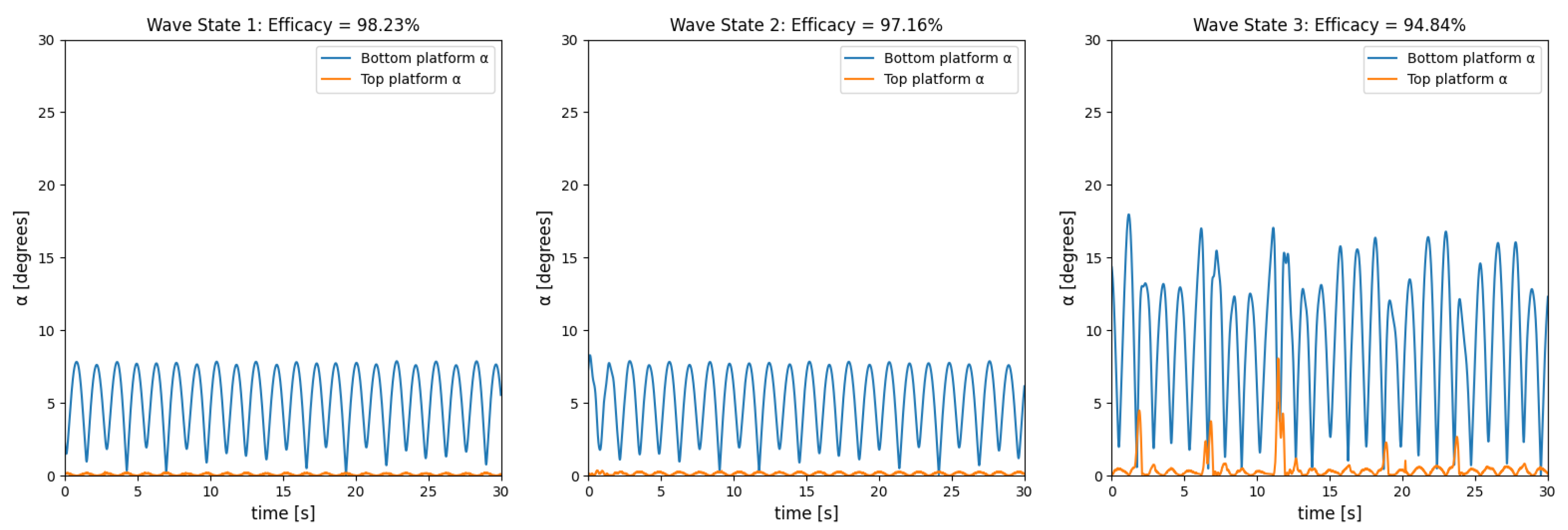
5. Simulation and Results
- The speed capacity of the linear actuators: with faster cylinders, the position correction can also occur faster, which will lead to less motion of the top platform. To improve the stability, one can acquire a more expensive, albeit faster, cylinder, which can be harder to control properly.
- The adopted control system: the simplicity of the adopted control system leads to poor adaptation to quick rates of change induced by waves with high amplitudes and short periods (evidenced in Figure 12). Due to tidal wave predictability and stability, and since UAVs usually do not operate well in strong winds (which cause highly irregular waves), the implementation of a predictive control system is recommended. Other studies such as that of Halvorsen et al. [37] have shown the success of this type of prediction algorithm for wave synchronization for rougher sea states.
- The small size of the vessel also implies that its roll and pitch orientation will be more affected by the wave’s motion. Thus, a bigger vessel could also provide better stability.
6. Discussion
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Conflicts of Interest
Abbreviations
| UAV | Unmanned aerial vehicle |
| ASV | Autonomous surface vehicle |
| ROS | Robot operating system |
| R-joint | Revolute joint |
| U-joint | Universal joint |
| IMU | Inertial measurement unit |
| DoF | Degrees of freedom |
| URDF | Unified robot description format |
| PID | Proportional–integral–derivative |
References
- Lynch, K.M.; Park, F.C. Modern Robotics: Mechanics, Planning, and Control, 1st ed.; Cambridge University Press: Cambridge, MA, USA, 2017. [Google Scholar]
- Ghobakhloo, A.; Eghtesad, M.; Azadi, M. Position control of a Stewart-Gough platform using inverse dynamics method with full dynamics. In Proceedings of the 9th IEEE International Workshop on Advanced Motion Control, Istanbul, Turkey, 27–29 March 2006; pp. 50–55. [Google Scholar]
- Meng, X.; Gao, F.; Wu, S.; Ge, Q.J. Type synthesis of parallel robotic mechanisms: Framework and brief review. Mech. Mach. Theory 2014, 78, 177–186. [Google Scholar] [CrossRef]
- Stewart, D. A platform with six degrees of freedom. Proc. Inst. Mech. Eng. 1965, 180, 371–386. [Google Scholar] [CrossRef]
- Zhao, J.; Feng, Z.; Chu, F.; Ma, N. Advanced Theory of Constraint and Motion Analysis for Robot Mechanisms; Academic Press: Cambridge, MA, USA, 2013. [Google Scholar]
- Merlet, J.P. Parallel Robots; Springer Science & Business Media: Berlin/Heidelberg, Germany, 2005; Volume 128. [Google Scholar]
- Kong, X.; Gosselin, C. Virtual-Chain Approach for the Type Synthesis of Parallel Mechanisms; Springer: Berlin/Heidelberg, Germany, 2007. [Google Scholar]
- Zhao, J.S.; Zhou, K.; Mao, D.Z.; Gao, Y.F.; Fang, Y. A new method to study the degree of freedom of spatial parallel mechanisms. Int. J. Adv. Manuf. Technol. 2004, 23, 288–294. [Google Scholar] [CrossRef]
- Guan, L.W.; Wang, J.S.; Wang, L.P. Mobility analysis of the 3-UPU parallel mechanism based on screw theory. In Proceedings of the 2004 International Conference on Intelligent Mechatronics and Automation, Chengdu, China, 26–31 August 2004; pp. 309–314. [Google Scholar]
- Wang, L.; Xu, H.; Guan, L. Mobility analysis of parallel mechanisms based on screw theory and mechanism topology. Adv. Mech. Eng. 2015, 7, 1687814015610467. [Google Scholar] [CrossRef]
- Cai, J.; Deng, X.; Feng, J.; Xu, Y. Mobility analysis of generalized angulated scissor-like elements with the reciprocal screw theory. Mech. Mach. Theory 2014, 82, 256–265. [Google Scholar] [CrossRef] [Green Version]
- Fang, H.; Fang, Y.; Zhang, K. Kinematics and workspace analysis of a novel 3-DOF parallel manipulator with virtual symmetric plane. Proc. Inst. Mech. Eng. Part C J. Mech. Eng. Sci. 2013, 227, 620–629. [Google Scholar] [CrossRef]
- Zhang, H.; Fang, H.; Zhang, D.; Luo, X.; Zou, Q. Forward kinematics and workspace determination of a novel redundantly actuated parallel manipulator. Int. J. Aerosp. Eng. 2019, 2019, 4769174. [Google Scholar] [CrossRef]
- Pashkevich, A.; Chablat, D.; Wenger, P. Kinematics and workspace analysis of a three-axis parallel manipulator: The Orthoglide. Robotica 2006, 24, 39–49. [Google Scholar] [CrossRef] [Green Version]
- Desai, R.; Muthuswamy, S. A forward, inverse kinematics and workspace analysis of 3RPS and 3RPS-R parallel manipulators. Iran. J. Sci. Technol. Trans. Mech. Eng. 2021, 45, 115–131. [Google Scholar] [CrossRef]
- Laryushkin, P.; Antonov, A.; Fomin, A.; Essomba, T. Velocity and Singularity Analysis of a 5-DOF (3T2R) Parallel-Serial (Hybrid) Manipulator. Machines 2022, 10, 276. [Google Scholar] [CrossRef]
- Du, X.; Wang, B.; Zheng, J. Geometric Error Analysis of a 2UPR-RPU Over-Constrained Parallel Manipulator. Machines 2022, 10, 990. [Google Scholar] [CrossRef]
- Jones, T.; Dunlop, G. Analysis of rigid-body dynamics for closed-loop mechanisms—Its application to a novel satellite tracking device. Proc. Inst. Mech. Eng. Part I J. Syst. Control. Eng. 2003, 217, 285–298. [Google Scholar]
- Wapler, M.; Urban, V.; Weisener, T.; Stallkamp, J.; Dürr, M.; Hiller, A. A Stewart platform for precision surgery. Trans. Inst. Meas. Control 2003, 25, 329–334. [Google Scholar] [CrossRef]
- Ladenburg, J.; Hevia-Koch, P.; Petrović, S.; Knapp, L. The offshore-onshore conundrum: Preferences for wind energy considering spatial data in Denmark. Renew. Sustain. Energy Rev. 2020, 121, 109711. [Google Scholar] [CrossRef]
- Campos, D.F.; Pereira, M.; Matos, A.; Pinto, A.M. DIIUS-Distributed Perception for Inspection of Aquatic Structures. In Proceedings of the OCEANS 2021: San Diego—Porto, San Diego, CA, USA, 20–23 September 2021; pp. 1–5. [Google Scholar]
- Pinto, A.M.; Matos, A.C. MARESye: A hybrid imaging system for underwater robotic applications. Inf. Fusion 2020, 55, 16–29. [Google Scholar] [CrossRef]
- Silva, R.; Matos, A.; Pinto, A.M. Multi-criteria metric to evaluate motion planners for underwater intervention. Auton. Robots 2022, 46, 971–983. [Google Scholar] [CrossRef]
- Shafiee, M.; Zhou, Z.; Mei, L.; Dinmohammadi, F.; Karama, J.; Flynn, D. Unmanned aerial drones for inspection of offshore wind turbines: A mission-critical failure analysis. Robotics 2021, 10, 26. [Google Scholar] [CrossRef]
- Pereira, P.N.D.A.A.D.S.; Campilho, R.D.S.G.; Pinto, A.M.G. Application of a Design for Excellence Methodology for a Wireless Charger Housing in Underwater Environments. Machines 2022, 10, 232. [Google Scholar] [CrossRef]
- Aissi, M.; Moumen, Y.; Berrich, J.; Bouchentouf, T.; Bourhaleb, M.; Rahmoun, M. Autonomous solar USV with an automated launch and recovery system for UAV: State of the art and Design. In Proceedings of the 2020 IEEE 2nd International Conference on Electronics, Control, Optimization and Computer Science (ICECOCS), Kenitra, Morocco, 2–3 December 2020; pp. 1–6. [Google Scholar]
- Li, W.; Ge, Y.; Guan, Z.; Ye, G. Synchronized Motion-Based UAV–USV Cooperative Autonomous Landing. J. Mar. Sci. Eng. 2022, 10, 1214. [Google Scholar] [CrossRef]
- Liu, J.; Zhang, D.; Chen, Y.; Xia, Z.; Wu, C. Design of a class of generalized parallel mechanisms for adaptive landing and aerial manipulation. Mech. Mach. Theory 2022, 170, 104692. [Google Scholar] [CrossRef]
- Guo, J.; Li, G.; Li, B.; Wang, S. A ship active vibration isolation system based on a novel 5-DOF parallel mechanism. In Proceedings of the 2014 IEEE International Conference on Information and Automation (ICIA), Hailar, China, 28–30 July 2014; pp. 800–805. [Google Scholar] [CrossRef]
- Chen, B.Y.; Chiang, M.H. Simulation and experiment of a turbine access system with three-axial active motion compensation. Ocean Eng. 2019, 176, 8–19. [Google Scholar] [CrossRef]
- Cai, Y.; Zheng, S.; Liu, W.; Qu, Z.; Zhu, J.; Han, J. Sliding-mode control of ship-mounted Stewart platforms for wave compensation using velocity feedforward. Ocean Eng. 2021, 236, 109477. [Google Scholar] [CrossRef]
- Pinto, A.M.; Marques, J.V.A.; Campos, D.F.; Abreu, N.; Matos, A.; Jussi, M.; Berglund, R.; Halme, J.; Tikka, P.; Formiga, J.; et al. ATLANTIS—The Atlantic Testing Platform for Maritime Robotics. In Proceedings of the OCEANS 2021, San Diego—Porto, San Diego, CA, USA, 20–23 September 2021; pp. 1–5. [Google Scholar] [CrossRef]
- Zhao, T.S.; Li, Y.W.; Chen, J.; Wang, J.C. A Novel Four-DOF Parallel Manipulator Mechanism and Its Kinematics. In Proceedings of the 2006 IEEE Conference on Robotics, Automation and Mechatronics, Bangkok, Thailand, 7–9 June 2006; pp. 1–5. [Google Scholar] [CrossRef]
- Neves, F.S.; Claro, R.M.; Pinto, A.M. End-to-End Detection of a Landing Platform for Offshore UAVs Based on a Multimodal Early Fusion Approach. Sensors 2023, 23, 2434. [Google Scholar] [CrossRef]
- Bingham, B.; Agüero, C.; McCarrin, M.; Klamo, J.; Malia, J.; Allen, K.; Lum, T.; Rawson, M.; Waqar, R. Toward maritime robotic simulation in gazebo. In Proceedings of the OCEANS 2019, Seattle, WA, USA, 27–31 October 2019; pp. 1–10. [Google Scholar]
- Thon, S.; Dischler, J.M.; Ghazanfarpour, D. Ocean waves synthesis using a spectrum-based turbulence function. In Proceedings of the Computer Graphics International 2000, Geneva, Switzerland, 19–24 June 2000; pp. 65–72. [Google Scholar]
- Halvorsen, H.S.; Øveraas, H.; Landstad, O.; Smines, V.; Fossen, T.I.; Johansen, T.A. Wave motion compensation in dynamic positioning of small autonomous vessels. J. Mar. Sci. Technol. 2021, 26, 693–712. [Google Scholar] [CrossRef]













{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Motion Variable | Range of Sweep | Verified Limit | Units |
|---|---|---|---|
| Pitch | /2 to /2 | /9 to /9 | rad |
| Roll | /2 to /2 | /9 to /9 | rad |
| Wave State | Number of Waves | Amplitude [m] | Period [s] | Direction [x,y] | (%) |
|---|---|---|---|---|---|
| 1 | 1 | 0.2 | 3 | [1,1] | 98.23 |
| 2 | 2 | 0.2;0.3 | 5;3 | [1,0];[0,1] | 97.16 |
| 3 | 3 | 0.2;0.3;0.4 | 7;5;3 | [1,0];[0,1];[1,1] | 94.84 |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2023 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Pereira, P.; Campilho, R.; Pinto, A. An Inverse Kinematics Approach for the Analysis and Active Control of a Four-UPR Motion-Compensated Platform for UAV–ASV Cooperation. Machines 2023, 11, 478. https://doi.org/10.3390/machines11040478
Pereira P, Campilho R, Pinto A. An Inverse Kinematics Approach for the Analysis and Active Control of a Four-UPR Motion-Compensated Platform for UAV–ASV Cooperation. Machines. 2023; 11(4):478. https://doi.org/10.3390/machines11040478
Chicago/Turabian StylePereira, Pedro, Raul Campilho, and Andry Pinto. 2023. "An Inverse Kinematics Approach for the Analysis and Active Control of a Four-UPR Motion-Compensated Platform for UAV–ASV Cooperation" Machines 11, no. 4: 478. https://doi.org/10.3390/machines11040478
APA StylePereira, P., Campilho, R., & Pinto, A. (2023). An Inverse Kinematics Approach for the Analysis and Active Control of a Four-UPR Motion-Compensated Platform for UAV–ASV Cooperation. Machines, 11(4), 478. https://doi.org/10.3390/machines11040478