1. Introduction
In recent years, battery electric vehicles (BEVs) and plug-in hybrid electric vehicle (PHEVs) have been introduced as new energy vehicles that are driven by electric motors, and they have grown in popularity [
1]. The performance of the induction motor (IM) drive system directly determines the motion performance of the vehicle. Fast response speed during acceleration and smooth operation while cruising are required by the IM drive system [
2]. In other words, fast transient response speed and small steady state torque ripple are the critical issues of IM drives [
3,
4]; this involves two concepts: (a) the model; and (b) linearization.
Rotor field-oriented control (RFOC) and direct torque control (DTC) based on a two-phase perpendicular coordinate system are the two classical control algorithms for IMs. With rotating coordinate transformation, RFOC decompose the stator current into flux linkage current and torque current in
axis to realize the linear control of torque and flux linkage [
5]. This method shows high control accuracy but slow torque response speed. The decoupling relationship can only be established when the magnetic linkage amplitude has minimal fluctuations. Therefore, the RFOC is approximately decoupled. Rated excitation is not required under light load conditions, which leads to performance degradation [
6]. When the electric vehicle accelerates and decelerates frequently, the fluctuation in the DC bus voltage also destabilizes the flux linkage, which then also weakens the control performance [
7]. When the speed rises above the rated speed, the coupling between torque current and excitation current can become so large that it becomes out of control [
8]. In the
axis, DTC selects the best voltage vector through the switch vector table to directly control the stator flux amplitude and electromagnetic torque. Therefor DTC shows faster torque response speed than RFOC. However, DTC has large torque and flux ripples, and the switching frequency is not fixed, due to the hysteresis controller. To solve these problems, many methods have been proposed: SVM [
9], constant switching frequency [
10], the duty-cycle method [
11], deadbeat control method [
12], and neural network method [
13]. These methods have reduced ripples with additional control parts, but often complicate the control structure. Both RFOC and DTC are based on quasi-transient state models instead of complete transient models, which makes the decoupling conditions essential. Therefore, in this case, it is impossible to improve both the transient and steady-state responses.
From the perspective of the physical mechanism, the essence of the flux linkage and torque changes during the transient is the change of reactive and active energies. Therefore, a thorough motor transient model was needed to describe this process. It is easy to use instantaneous active and reactive power to build a motor model. Indirect instantaneous reactive power and instantaneous active power (IPQC) directly use dual instantaneous power to control the rotating magnetic field to reduce the torque and flux ripples, but they include an additional current decoupling part [
14]. A dual instantaneous power algorithm can also be directly applied to the motor drive without a current PI controller, resulting in increased current harmonics [
15]. Furthermore, instantaneous reactive power and instantaneous active power directly determine the amplitude change rate and the rotation change rate of the stator magnetic field. The amplitude and angular frequency of the magnetic field have been be used to establish the transient model of the motor. A model obtained from a large amount of test data could describe the process from power supply voltage and frequency to amplitude and phase of response [
16]. However, this conclusion has yet to be experimentally proven.
The next problem is the linearization of torque and flux linkage. In contrast to the traditional local linearization using Taylor series expansion near the stable operation point, the global linearization method does not ignore any higher-order nonlinear term in the linearization process, so this method is accurate [
17,
18]. Input-output linearization is a classical global linearization method that can decouple the motor system into the independent flux linkage system and torque system. By deducing the affine nonlinear model and selecting the differential homeomorphism transformation, the decoupling controller is designed through the state feedback control law [
19,
20,
21]. When the relative-degree of the system is not equal to the order of the system, the complex zero dynamic problem must be discussed before the decoupling controller can be designed [
22]. The input-output linearization steps are numerous and have no clear physical definitions, which has limited its applications. In order to simplify these methods, a direct feedback linearization control (DFL) based on input-output linearization was proposed; this could also realize the decoupling of torque and flux linkage [
23].
Therefore, an accurate description of the motor transient and global linearization are two key issues to consider for high-performance motor control algorithms. Reference [
24] selected the scalar product and the vector product of the stator and rotor flux vectors, as well as the square signal of the flux amplitude, to construct the mathematical model of an IM and proposed a sliding-mode variable control structure based on feedback linearization, which improves the robustness and steady-state control accuracy of the system. This method could accurately describe the transient process of the motor and achieve global decoupling. However, this method still had some shortcomings: (1) it did not explain the physical significance of the new variables and models; and (2) sliding mode transformation achieved good results but complicated the algorithm.
This paper proposes a new IM model and a new control algorithm, which could effectively reduce the steady-state ripple and improve the transient torque response speed. First, the tangential action of the rotating magnetic field of IM is characterized by the reactive torque, and then the mathematical model with the reactive torque and the electromagnetic torque as state variables could be expressed as a dual-torque model. This model directly shows the changes in reactive and active energy in the transient process of IM, which is the physical quantity essence of the motor transient. The electromagnetic torque and reactive torque are naturally perpendicular in space, which could greatly simplify the analysis process of feedback linearization and avoid the zero-dynamic problem. In addition, the dual-torque control system is linearized into two cascaded first-order systems, so its stability is easy to explain. Then, we designed a control method based on different time scales to reduce the pulsation caused by the stator flux and the torque coupling, which is the defect of DTC. Finally, the electromagnetic torque and reactive torque are directly applied as the inner-loop feedback to speed up the torque response speed, and this improves the defects of RFOC. The proposed method is verified on an experimental platform of IM driven by a two-level inverter controlled by a dSPACE DS1104 controller.
3. The Proposed Method
The core of the electromechanical energy conversion of IM is a rotating air-gap magnetic field. As a rotating object, its dynamic characteristics can be better described by the amplitude and the rotational angular frequency, as compared to the Cartesian coordinate system. When the IM is disturbed, its torque and flux linkage change. As compared to its steady-state operation, this is directly reflected by the change of the amplitude and angular frequency of the rotating magnetic field. Essentially, this is the change of the instantaneous reactive power and instantaneous active power from the perspective of power balance.
The rotating air-gap magnetic field induces the stator rotating voltage vector in the stator winding and the rotor rotating voltage vector in the rotor winding. The rotor rotating voltage vector is directly related to the output torque. Because the stator leakage inductance of the IM is relatively small as compared to the mutual inductance, the stator resistance is also small, and the rotor electromotive force amplitude of the IM is approximately equal to the stator side voltage amplitude. Moreover, the rotor electromotive force rotation frequency is the same as the synchronous rotation frequency.
3.1. Dual-Torque Model of IM
The model shown by Formulas (7)–(11) is the most widely applied IM model, which is based on the mathematical relationship between various state variables. However, due to the high-order, nonlinear, and coupling characteristics of IM, the model cannot directly represent the physical essence of the transient process of IM.
Based on the dynamics of motor rotating voltage vector, IPQC establishes a model reflecting the transient process of the motor using instantaneous reactive power and instantaneous active power. However, the power quantity is not a dynamic variable, so the model cannot directly describe the dynamics of IM transient process. Therefore, we attempted to characterize the flux linkage with the reactive torque, and then we deduced the dynamic characteristics of the motor transient with the reactive torque and electromagnetic torque.
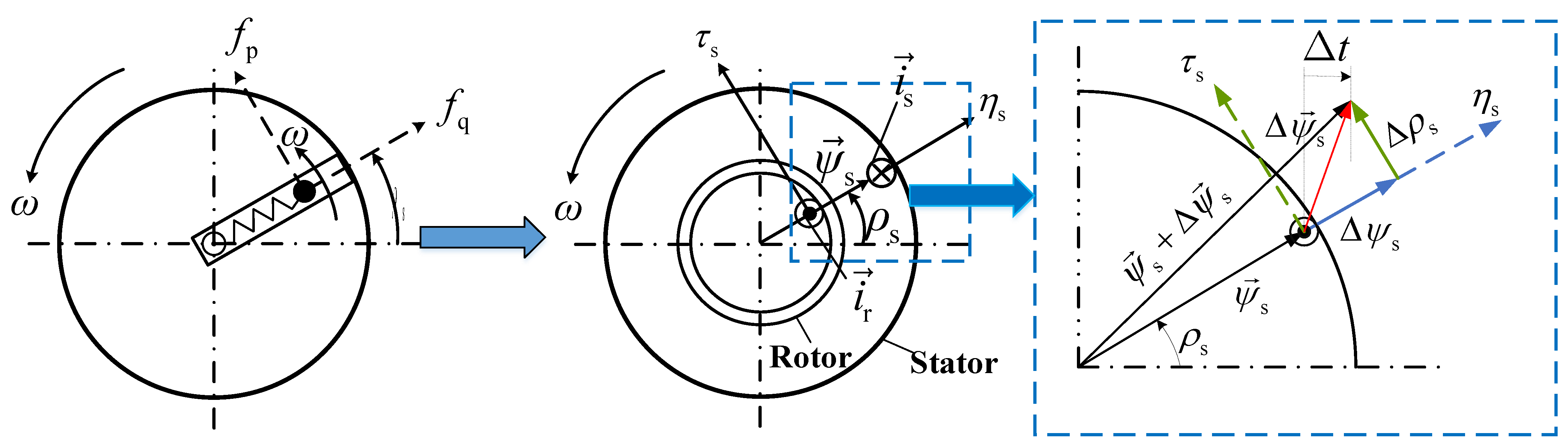
According to the description of the instantaneous power on the amplitude and the rotation angle frequency of the stator rotating voltage vector, the reactive torque should be the radial force, which determines its amplitude movement. The electromagnetic torque should be the tangential force, which determines its rotation angle frequency movement. Moreover, the reactive torque must be an electrical quantity in the same category as electromagnetic torque. Therefore, reactive torque is the duality of electromagnetic torque in both physics and mathematics. The equivalent physical model of IM is shown in
Figure 1.
The normalized electromagnetic torque is defined as the vector product of the stator flux linkage vector and the stator current, as follows:
The normalized reactive torque is the duality of the electromagnetic torque, so it should be expressed by the scalar product of the stator flux linkage vector and the stator current vector as follows:
where
represents the normalized electromagnetic torque,
represents the normalized reactive torque,
represents vector product, and
represents scalar product.
Next, the appropriate state variables should be selected. Evidently,
Considering the rotating magnetic field, the other two state variables are the amplitude and phase of the stator rotating magnetic field, as follows:
After calculating the differential of Formulas (22)–(25), we substituted Formulas (7)–(11) into the result. The dual-torque model can be written as follows:
In consideration of rotor speed dynamics, Formula (17) can be rewritten as the following:
Formulas (29) and (31) indicate that the rotation angle frequency or the magnetic phase of the stator flux can also be selected as the output quantity. However, the phase is not the response when the dual torque acts directly on the rotating magnetic field. It is just the reflection of the frequency difference between the IM rotating magnetic field and the power voltage vector due to the disturbance. The phase angle cannot directly reflect the dynamic changes of the induction motor at that moment. Then, the output variables of the dual-torque model should be selected as the amplitude of the stator flux and the rotation angle frequency. The dual-torque model is completely described by the Formulas (27), (28), (30), and (31). In other words, the dual torque model is a fourth-order model described by reactive torque , electromagnetic torque , square of the amplitude of the stator flux linkage , and rotation angle frequency . The dual-torque model directly relates the input instantaneous power on the stator side and the torque on the rotor side dynamically.
3.2. Linearization of Dual-Torque Model
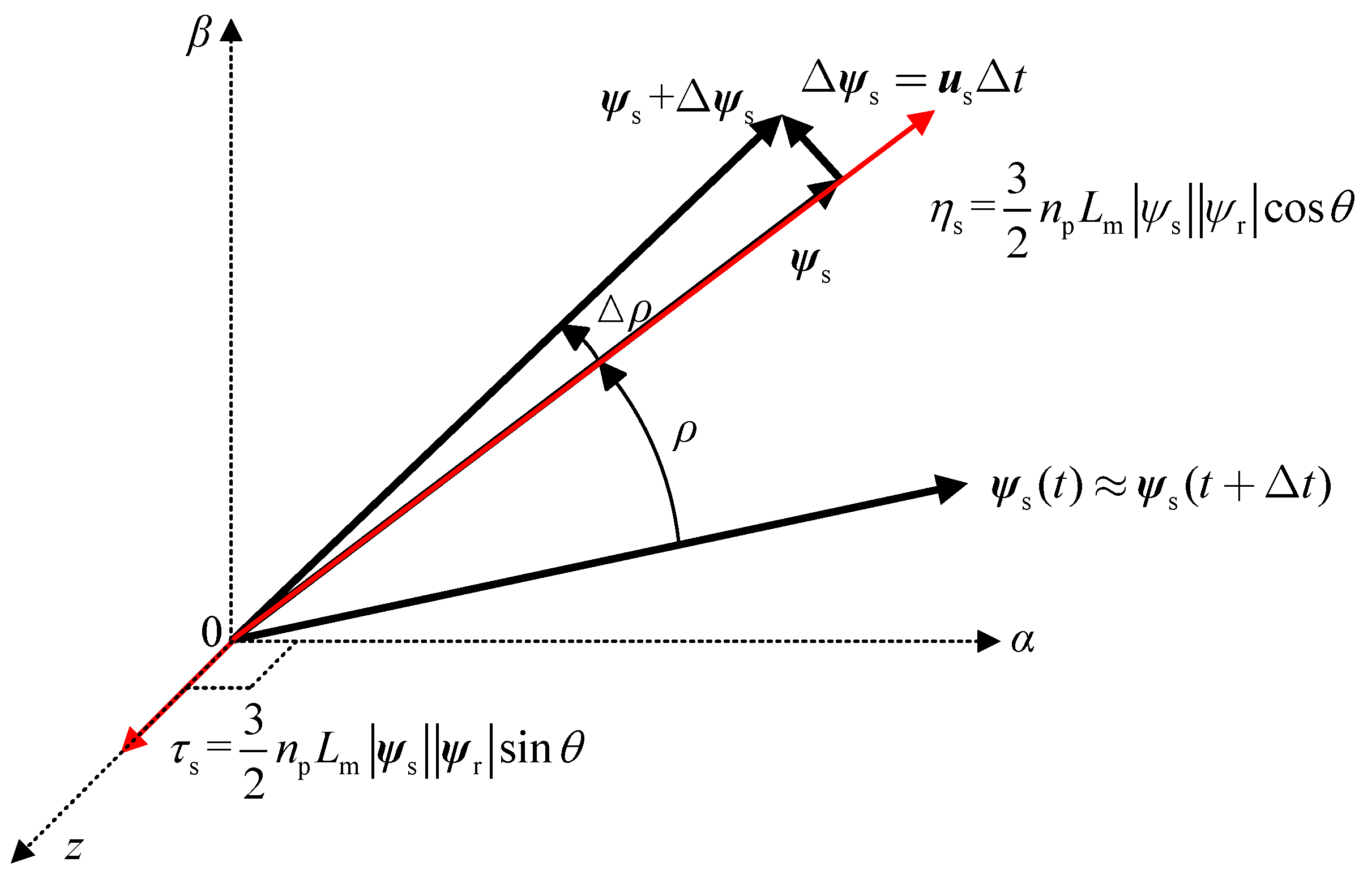
Although the dual-torque model intuitively represents the transient essence of IM, torque coupling in Formulas (27) and (28) still exists, and it is a coupled nonlinear system. It is necessary to decouple the dual torque. In order to ensure unconditional decoupling, the local linearization near the steady working point is not feasible. Input-output linearization requires the construction of an affine nonlinear model with complex steps and no clear physical significance. According to Formulas (20) and (21), the dual-torque coordinate system can be expressed as shown in
Figure 2. As shown in
Figure 2, the dual-torque is naturally orthogonal in the space, which indicates that the decoupling controller based on the dual-torque model has strong decoupling performance, because this perpendicular is unconditional.
This method must also analyze the zero-dynamic stability problem. A simple state transformation method that can realize linearization is proposed. Based on the aforementioned dual-torque model, the proposed method simplified the conventional FBL.
Two variables can be defined by the following:
These two variables can be used as the input signals for the dual-torque decoupling.
Then, the nonlinear system can be written as the following linear system:
It is obvious that and control and as input signals, respectively, and then and control and , respectively.
The next step is to find a state transformation. We solved Formulas (32) and (33), as follows:
where
In order to ensure the feasibility of this linearization, it is necessary to ensure that the transformation matrix from the control signals
and
to the reference voltage
and
is invertible, respectively. Based on Formulas (38) and (39), we know that the transformation matrix P can be written as follows:
The magnetic leakage coefficient
, and it is consistently found that stator flux linkage
, the stator inductance
, the reactive torque
, and the electromagnetic torque
are not zero when the motor was running, so the above formula is always reversible. In other words, this state transformation always exists, so the proposed feedback linearization is valid. Therefore, the proposed method can realize the global decoupling of
and
. The system described in Formulas (40)–(43) can be easily divided into two subsystems, as follows:
Formula (49) represents the conversion process of electric energy to mechanical energy, and Formula (50) represents the conversion process of electric energy to magnetic energy. Furthermore, can be controlled by , and can be controlled by . These two processes are independent of each other, so and are decoupled.
3.3. Stability Analysis of Dual-Torque Controller
Reference [
25] elaborated on the inevitable zero dynamic problem in feedback linearization. The main content of feedback linearization was to transform a nonlinear system into a linear system through a set of nonlinear coordinate transformations. According to the relationship between the system order
and the relative order
of the system, it could be discussed in two cases: (1) when
, the nonlinear system could be precisely linearized by nonlinear feedback; and (2) when
, there will inevitably be an
order zero dynamic subsystem, which was unobservable. Therefore, if the zero dynamic subsystem was unstable, then the entire system cannot be asymptotically stable. Regardless of the method used for feedback linearization, this issue must be addressed.
The output equation of the system Is expressed as follows:
For the subsystem described in Formula (43), The second derivative of
appears as
, so the relative-order of first subsystem is 2. For the subsystem described in Formula (44), the second derivative of
appears as
, so the relative order of second subsystem is 2. Therefore, the relative order of the system is 4. According to
Section 3.1, the dual-torque model is a fourth-order model. Therefore, the relative-order of the dual-torque model is equal to the system order. Based on the above theory, the proposed method will not exhibit zero dynamic subsystems. Therefore, as compared to conventional method [
26], the proposed method avoids the occurrence of zero dynamic problems.
In addition, since the decoupled dual-torque model is linear, the classical linear system theory can be used to analyze its stability. Because the poles of the differential equations of and are located in the left half-plane, the controller is stable. Consequently, the proposed linearization method is an effective and simplified method.
3.4. Multi-Time Scale Control System Based on Dual-Torque Model
After the nonlinear and coupled system model is converted into a linearized and decoupled system model, the linear control method can be applied. For the simple system described by Formulas (49) and (50), the closed-loop control system can be designed with PI controller, as follows:
The rotational speed is a mechanical quantity, so it is a slow variable with a change rate of 1000 ms, according to
Table A1. The dynamic characteristics of the magnetic linkage are determined by the rotor time constant
By substituting the data from
Table A2 into Formula (48), the time-variation scale is approximately 111 ms.
The time-variation scale of electromagnetic torque can be expressed by the following formula:
By substituting the data from
Table A2 into Formula (49), the time-variation scale is approximately 3.06 ms. According to Formulas (22) and (23), reactive torque and electromagnetic torque are physical quantities in the same category, so they have the same time-variation scale.
In summary, the rotational speed and the flux linkage are the state quantities of the same slow time scale, whereas the electromagnetic torque and the reactive torque are fast variables. The conventional IM control system controls the flux and torque simultaneously, and the state variables of different time scales are coupled, resulting in torque and flux ripples.
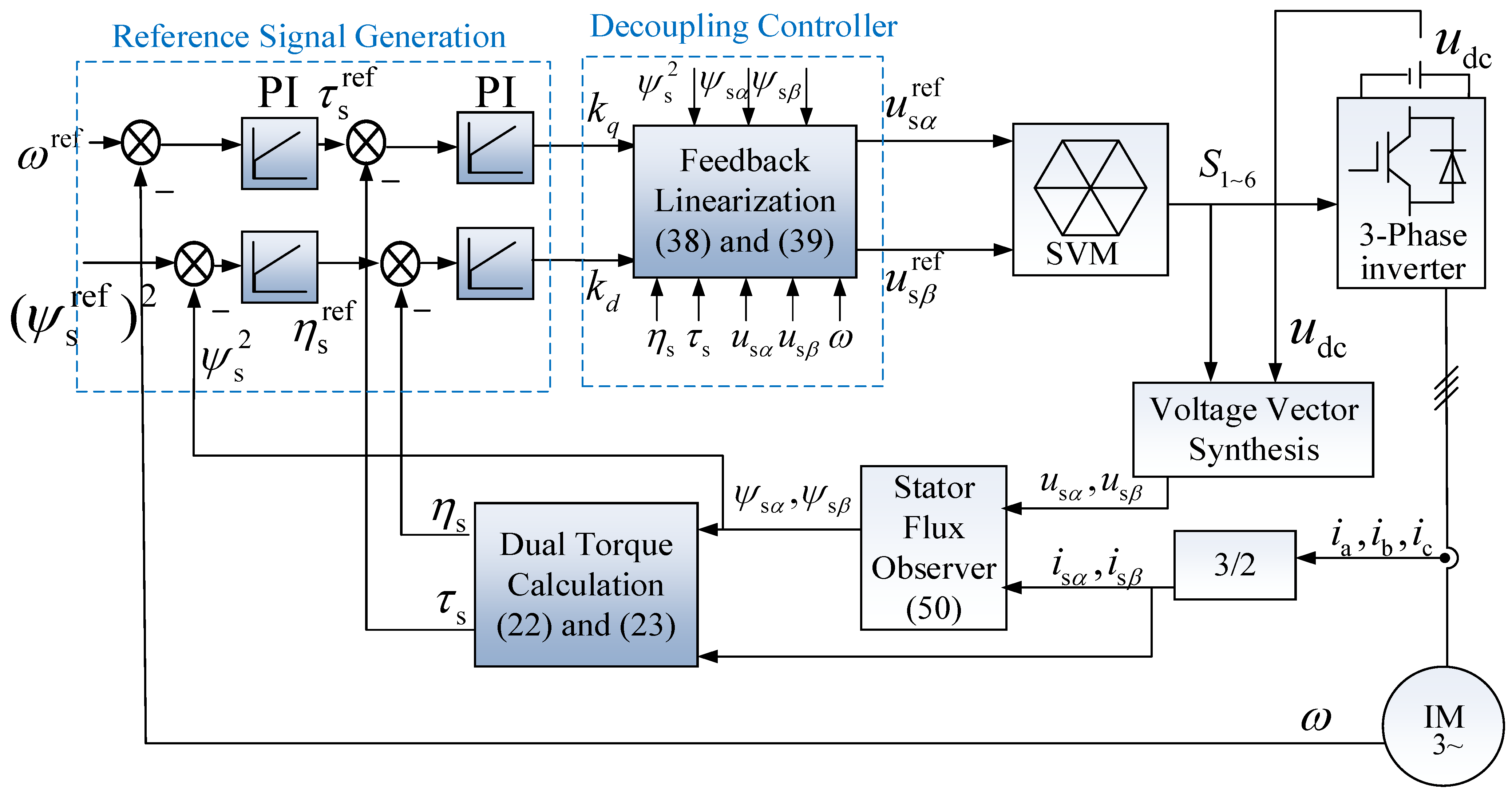
The reactive torque and electromagnetic torque proposed in this paper are physical quantities in the same category that describe the same physical object, so they have the same time scale. The state variable is changed to dual torque, from torque and flux linkage. The control system proposed in this paper places the dual-torque on the same layer of the inner loop and places the flux and speed control on the same layer of the outer loop, which reduces the torque ripple caused by the coupling of state variables at different time scales. The control system structure block diagram was created based on the aforementioned theoretical analysis, and it is shown in
Figure 3.
3.5. Dual-Torque Calculation and Stator Flux Observation
Reference Signal Generator: The error between the speed signal of the external controller and the measured speed signal generates the electromagnetic torque command through the PI controller; then, the error between the electromagnetic torque command and the measured electromagnetic torque generates control signal through the PI controller. The error between the magnetic linkage square command of the external controller and the measured magnetic linkage amplitude square generates the reactive torque command through the PI controller. Finally, the error between the reactive torque command and the measured reactive torque generates the control signal through the PI controller.
Signal Measurement and Calculation: The rotor speed is directly measured by the speed sensor, and the three-phase current signal is measured by the current sensor of each phase. The stator voltage signal is directly synthesized from the DC bus voltage and the output signal of the inverter, which can reduce the noise signal in the direct measurement process. The calculation method of stator flux linkage
is as follows:
This analysis shows that the methods proposed in this study do not use a rotation coordinate transformation. Moreover, the dual-torque signals calculated by stator voltage and stator current are directly used as the inner-loop feedback signal, which improves the torque response speed.
Decoupled Controller: The controller parameters include the square of the flux amplitude ; the component of the flux amplitude and ; the reactive torque ; the electromagnetic torque ; the voltage component and ; and the rotor speed . After control signals and are input to the controller, the controller will output signals and , respectively. Because the error between the actual value , and the command values , is very small, the command value of the control voltage can be regarded as the actual value, that is and .
4. Results and Analysis of Experiment
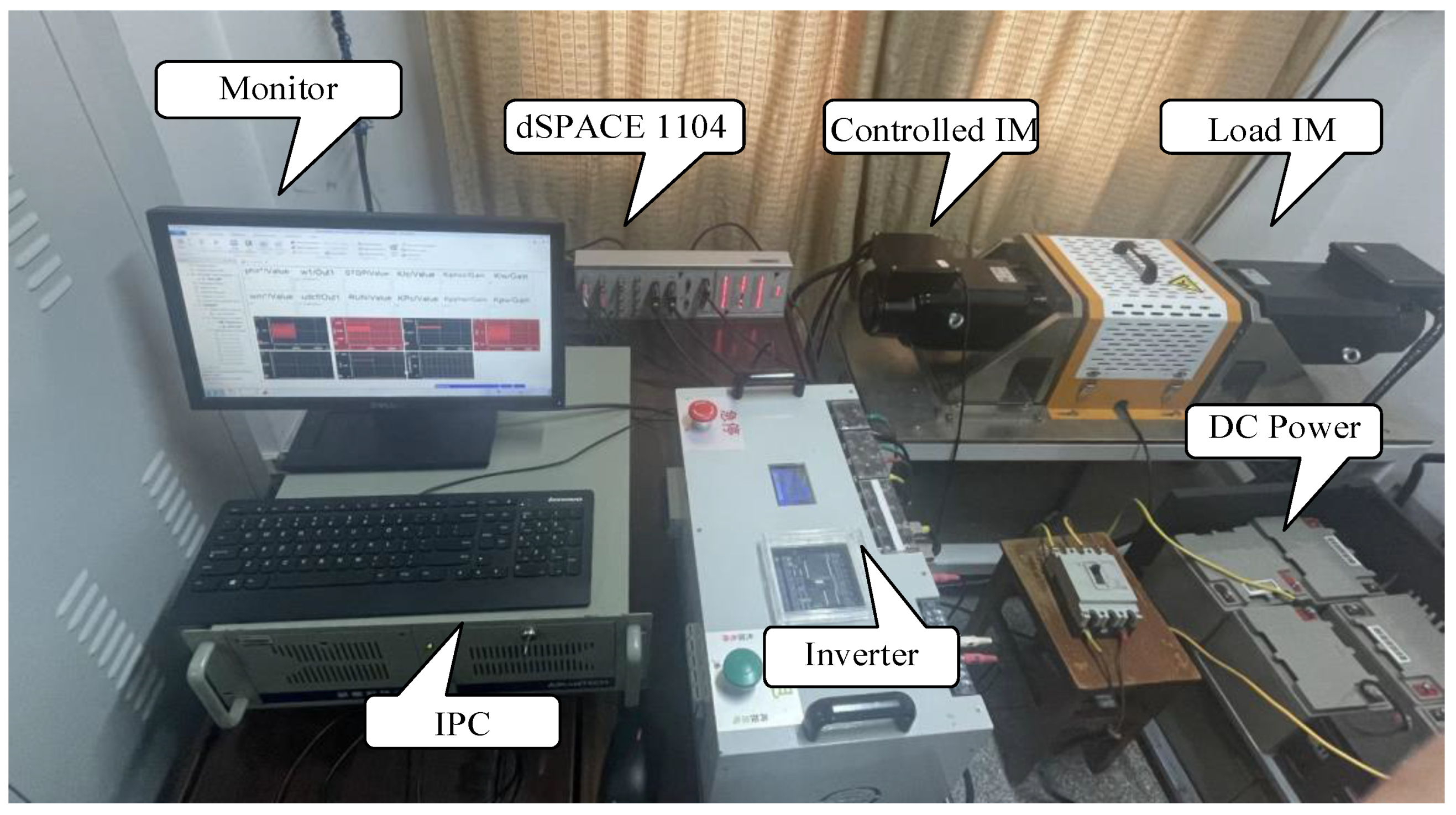
In order to verify the proposed algorithm, the experiment was implemented based on the dSPACE DS1104 controller platform for IM drives. The sampling frequency was 10 kHz, and the DC bus voltage was 300 V. The rotor speed was measured by the speed encoder. The parameters of the IM used in the experiment are shown in
Table A2.
The calculation formula for calculating the pulsation of the torque and the stator flux amplitude in steady state is as follows:
where,
is ripple of torque,
is value at the n-th point,
is the average of the selected data, and
is number of sampling points.
The experimental group was the proposed method, and the control group was RFOC and DTC–SVM. In order to ensure the effectiveness of the experiment, the same speed PI parameters were used in the three experiments. The experimental equipment is shown in
Figure 4.
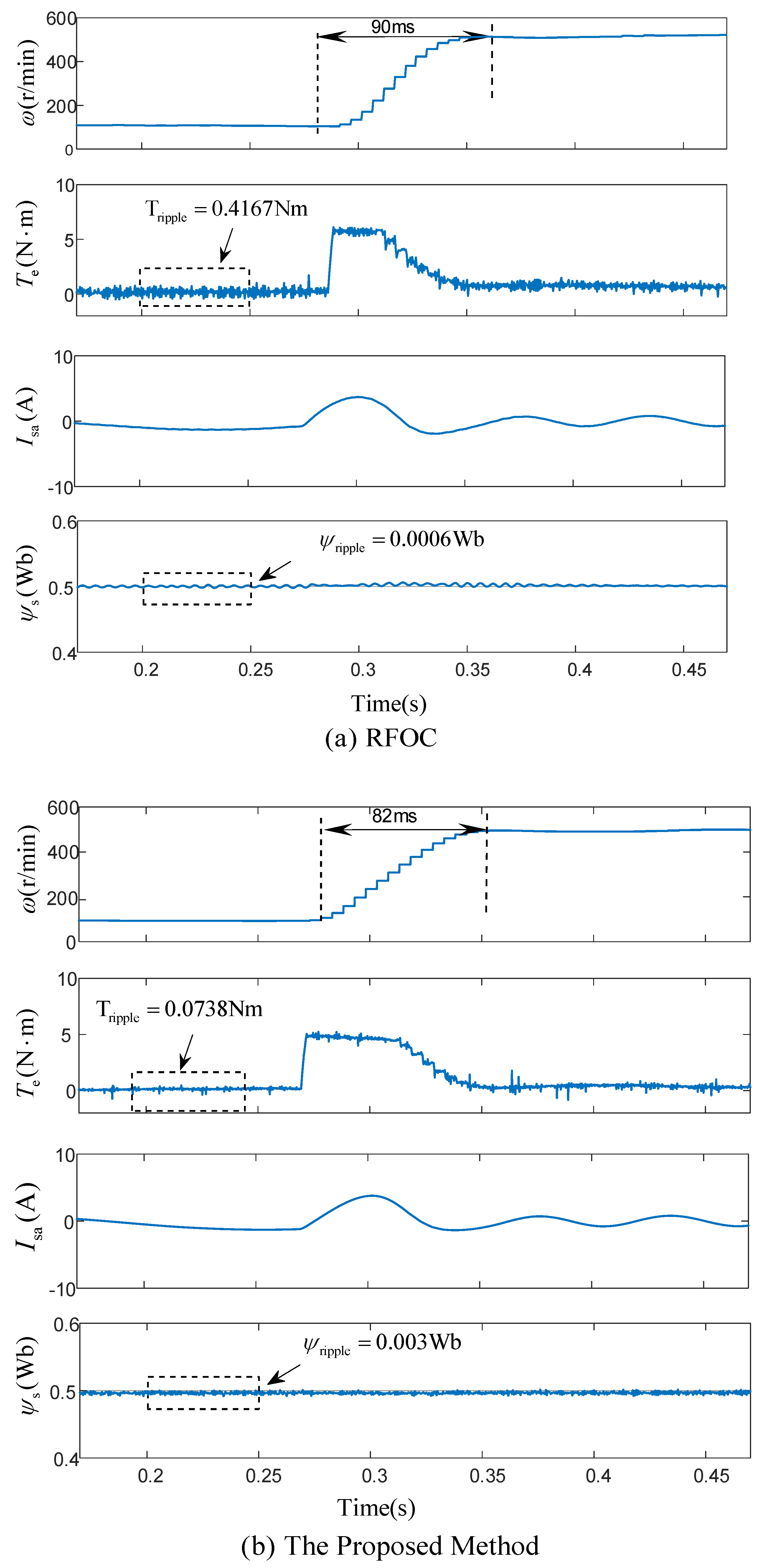
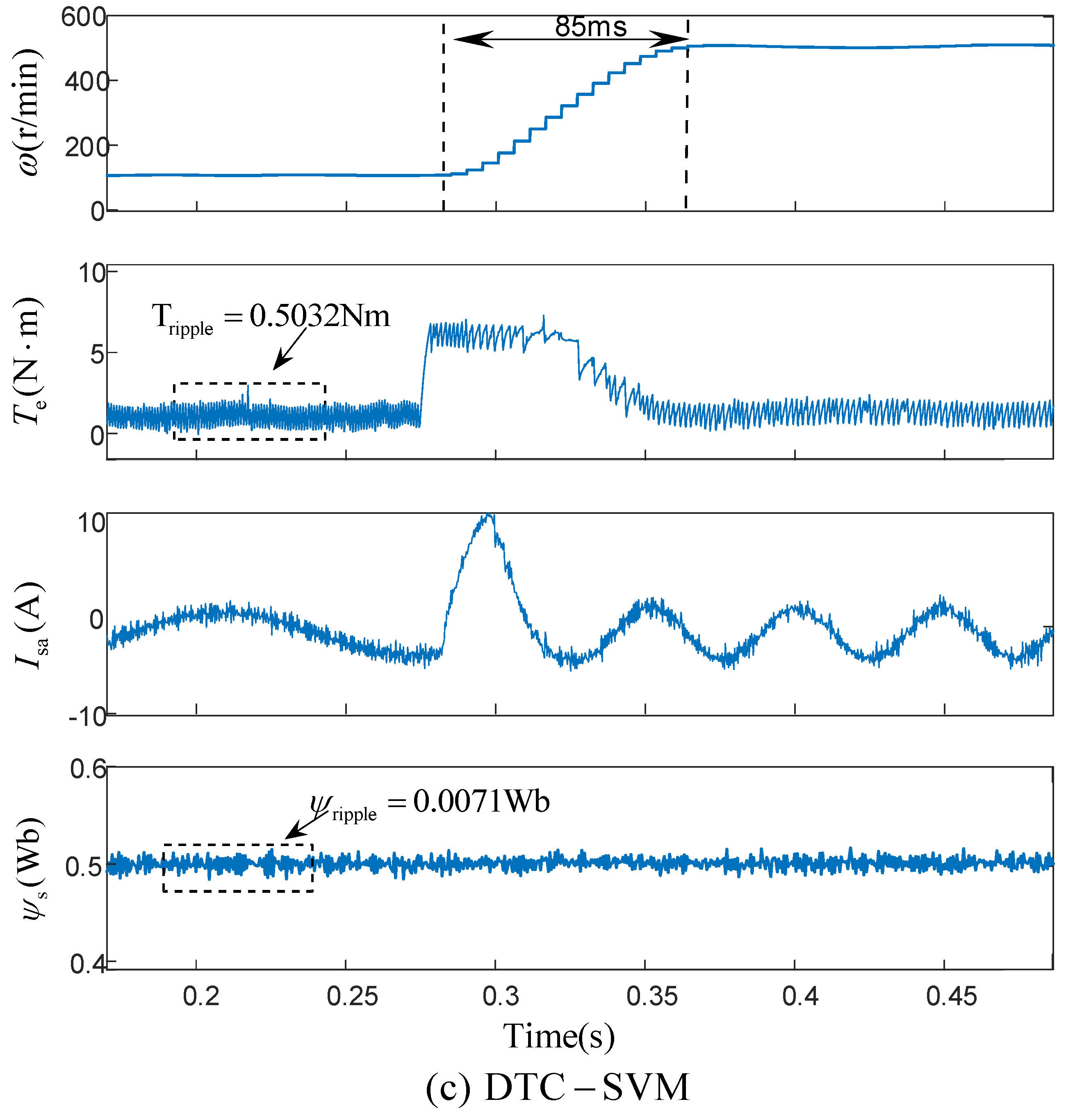
4.1. Step Speed Transient Characteristic
Firstly, the speed characteristics of the proposed method were studied and compared with RFOC and DTC–SVM. The flux linkage amplitude was 0.5 Wb, and the motor was set at 100 rpm after starting; after this, a speed command of 500 r/min was given. The step speed response characteristics of the three methods are shown in
Figure 5. The three methods could accurately track the reference speed, and the overshoot was zero. The experimental results showed that the speed response time of the proposed method was 8 ms faster than RFOC and 3 ms faster than DTC–SVM. In terms of torque, the torque variation of the three methods is very fast. The torque ripples of the proposed method were much smaller than that of DTC–SVM and RFOC. The proposed method had good decoupling performance. In addition, the current harmonics of the proposed method were still smaller than RFOC, whereas those of DTC–SVM are obvious. Clearly, the flux ripple of the proposed method is smaller than that of DTC–SVM.
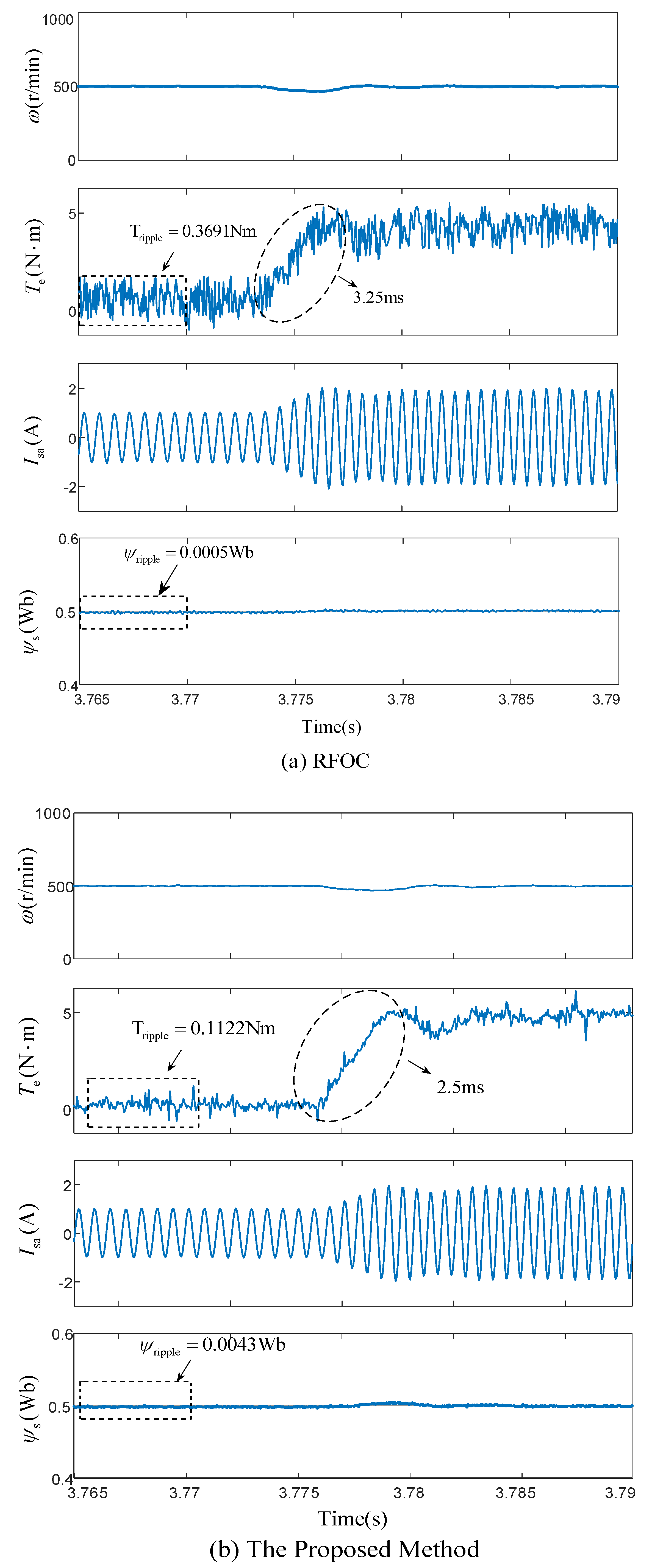
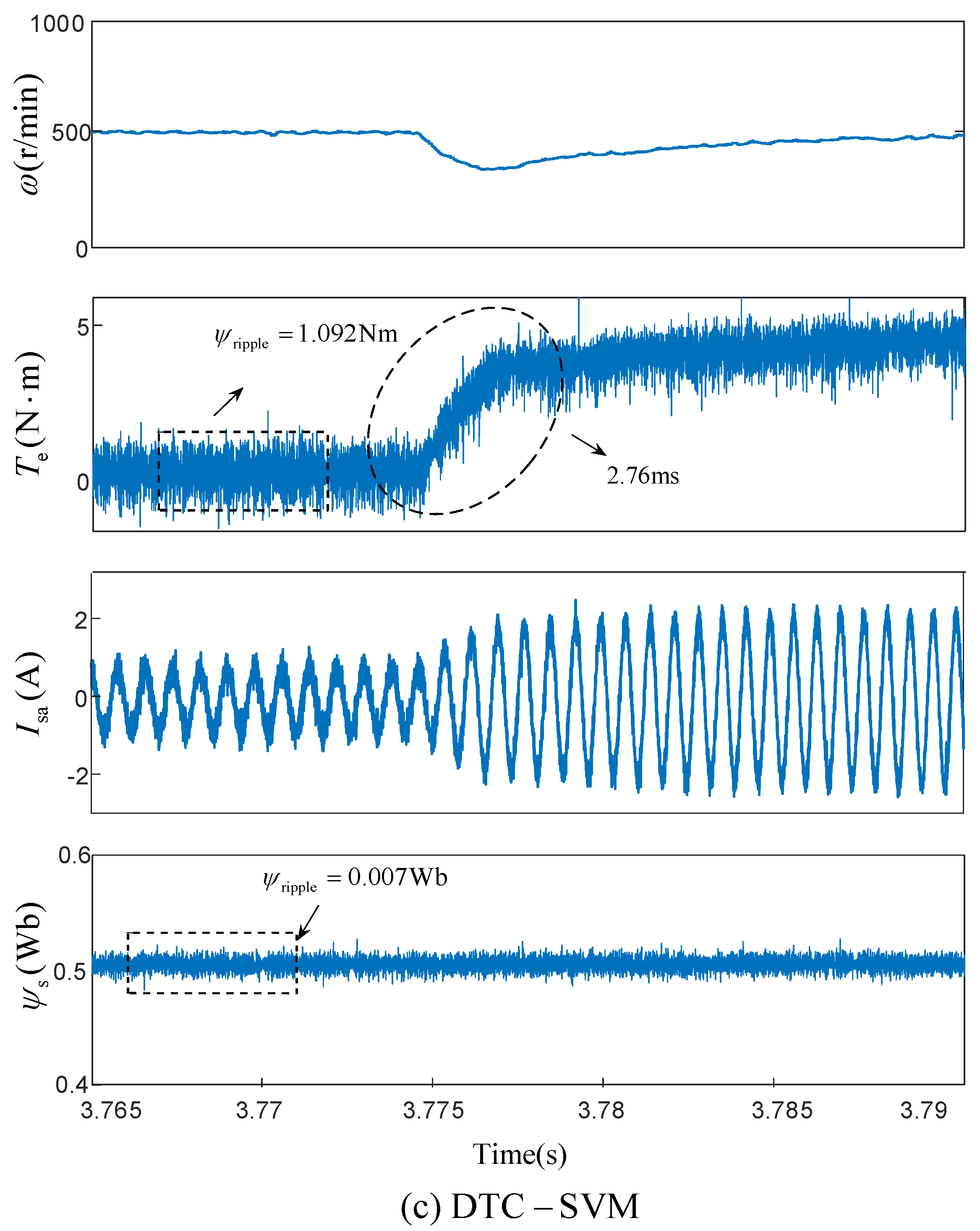
4.2. Step Torque Transient Characteristics
As shown in
Figure 6, the transient torque step response characteristics of the three methods were tested. The motor was started without a load and then maintain at a speed of 500 rpm; then, the torque was increased by 5 Nm. The torque speed increase of RFOC was 1.538 Nm/ms, whereas for the proposed method, it was 2 Nm/ms and for the DTC 1.8115 Nm/ms. The torque response of the proposed method was 30% faster than that of RFOC and 10% faster than that of DTC–SVM.
RFOC controlled the current through current feedback, then it controlled the magnetic field, and finally, it controlled the motor movement. The proposed method directly used the dual torque signal as the feedback inner loop, without the current loop, which accelerated the torque response speed, as compared to RFOC.
The torque response of DTC–SVM was faster than that of RFOC because DTC used voltages to control the magnetic field. The torque response of the proposed method was better than that of DTC, because it directly takes dual torque as the control object, and the control model did not involve a magnetic field.
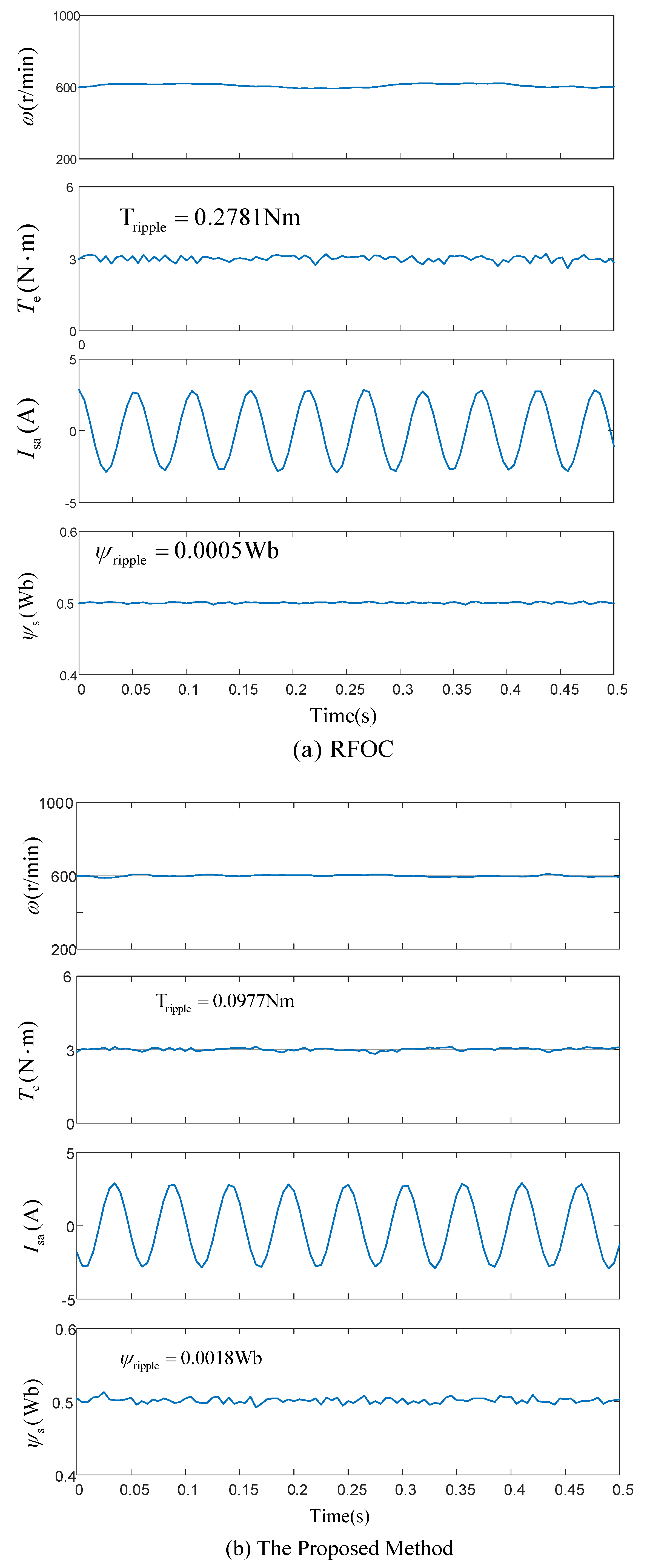
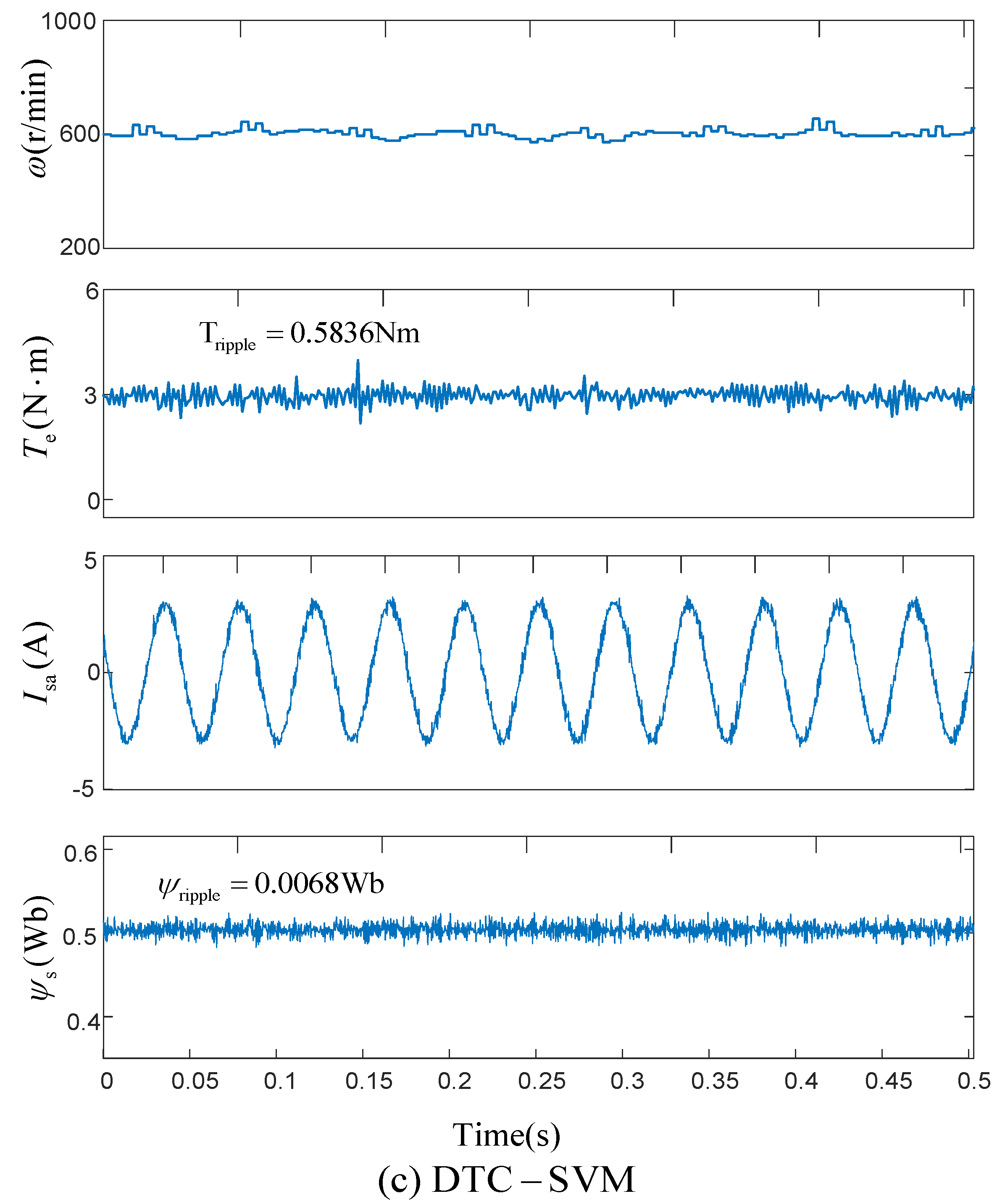
4.3. Steady-State Operations
Finally, the steady-state characteristics of the three methods shown in
Figure 7 were tested at 600 r/min with 3
load. Based on the calculation of Formula (55), the torque ripples of RFOC were 0.2781
, the torque ripples of the proposed method were 0.0977
, and the torque ripples of DTC–SVM were 0.5836
. The torque ripples of the proposed method were 65% less than that of RFOC and 84% less than that of DTC–SVM. In addition, according to the experimental results, the stator flux ripples of the proposed method were 0.0043
, and the stator flux ripples of DTC–SVM were 0.007
, so the flux ripples of the proposed method were 39.6% lower than that of DTC–SVM. Therefore, the proposed method could effectively reduce torque and flux ripples.
The proposed method was based on the dual-torque model, which was naturally perpendicular in physical space, so it had natural decoupling ability, which made it ideal for designing decoupling controllers. Moreover, since perpendicular is natural and the perpendicular was invariable, no other conditions were needed, which made the decoupling ability of the dual-torque model stronger than that of RFOC.



{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}









