



Design and Gait Control of an Active Lower Limb Exoskeleton for Walking Assistance †



Abstract
:1. Introduction
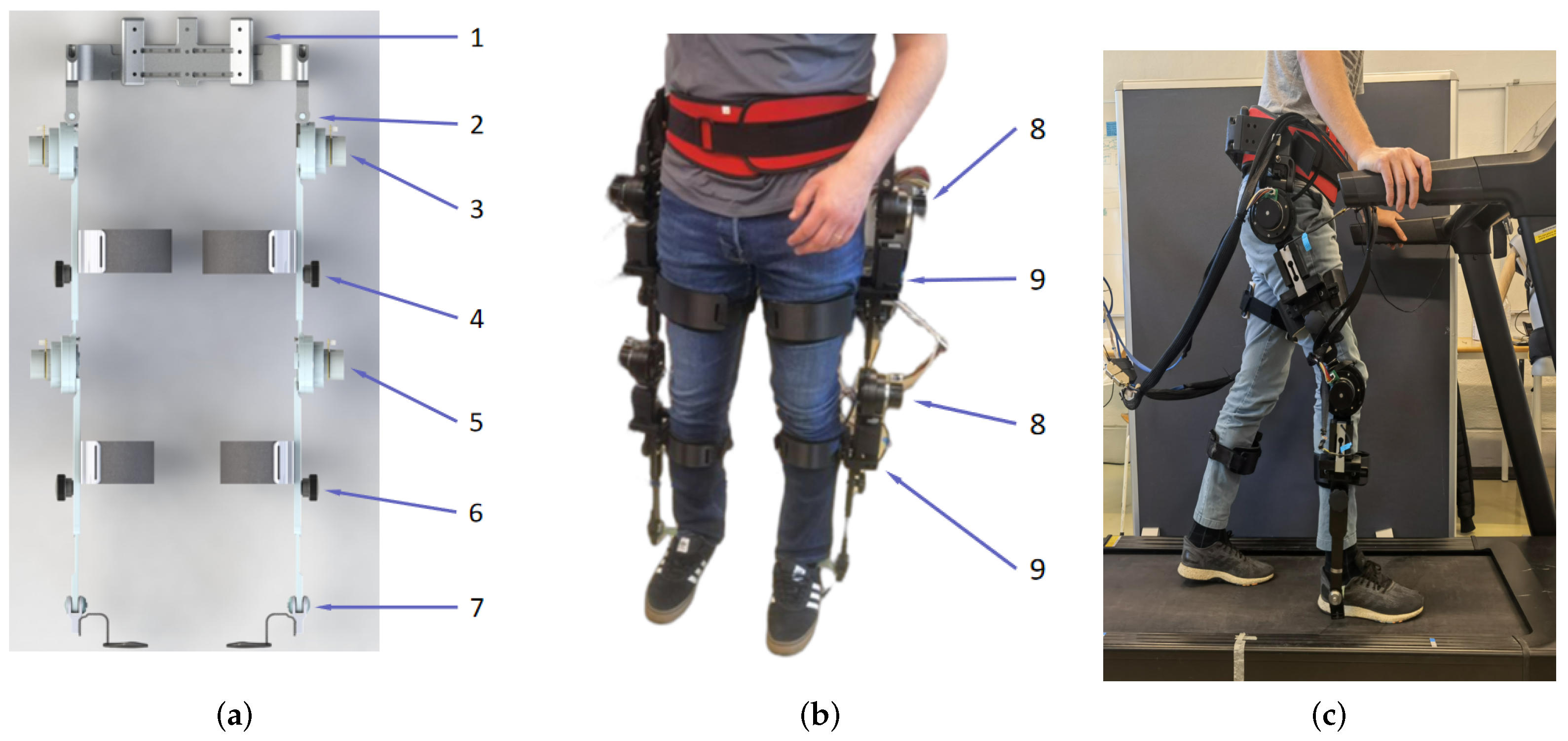
2. Active Lower Limb Exoskeleton Robot
2.1. The ALEXO Concept
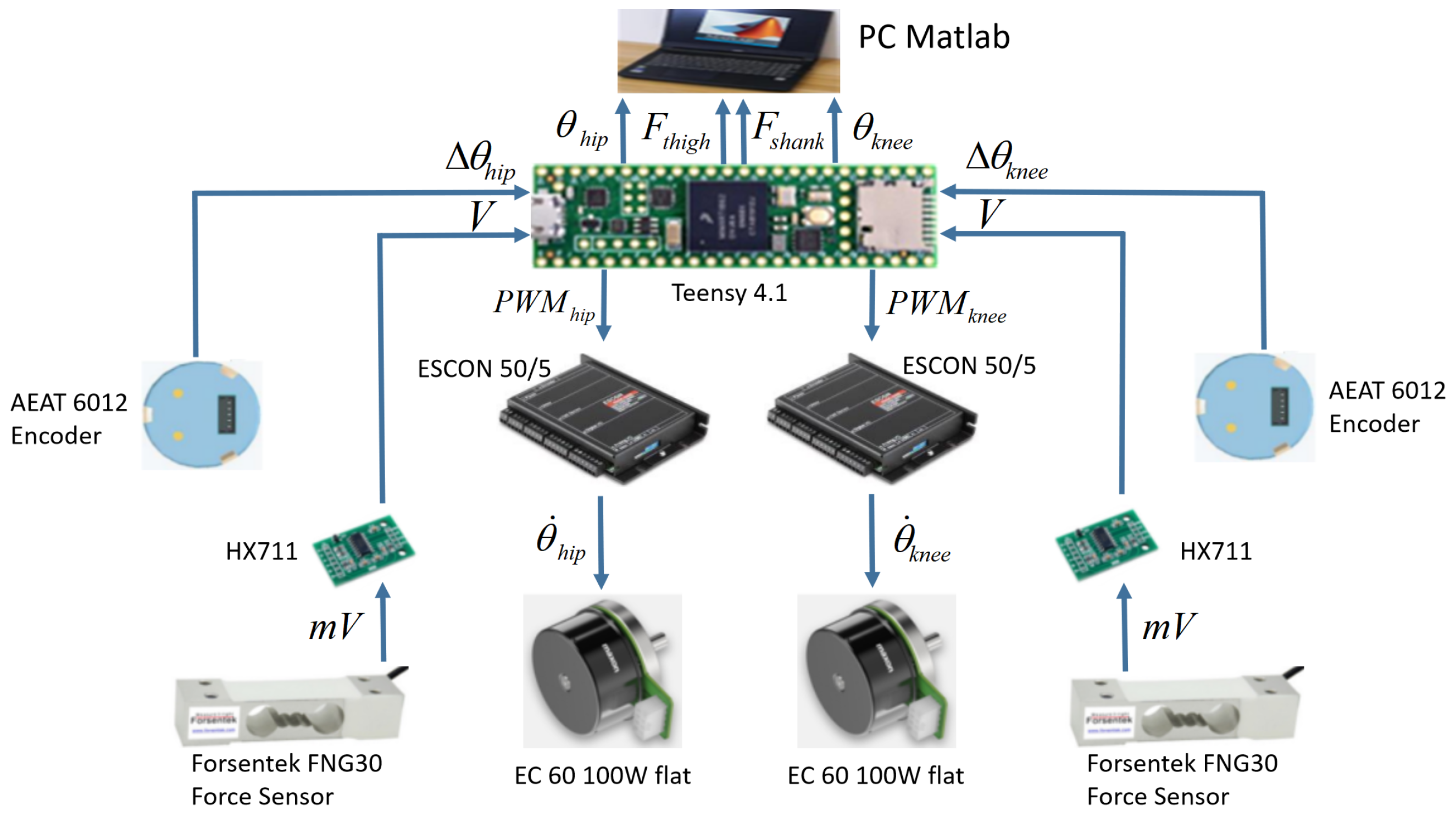
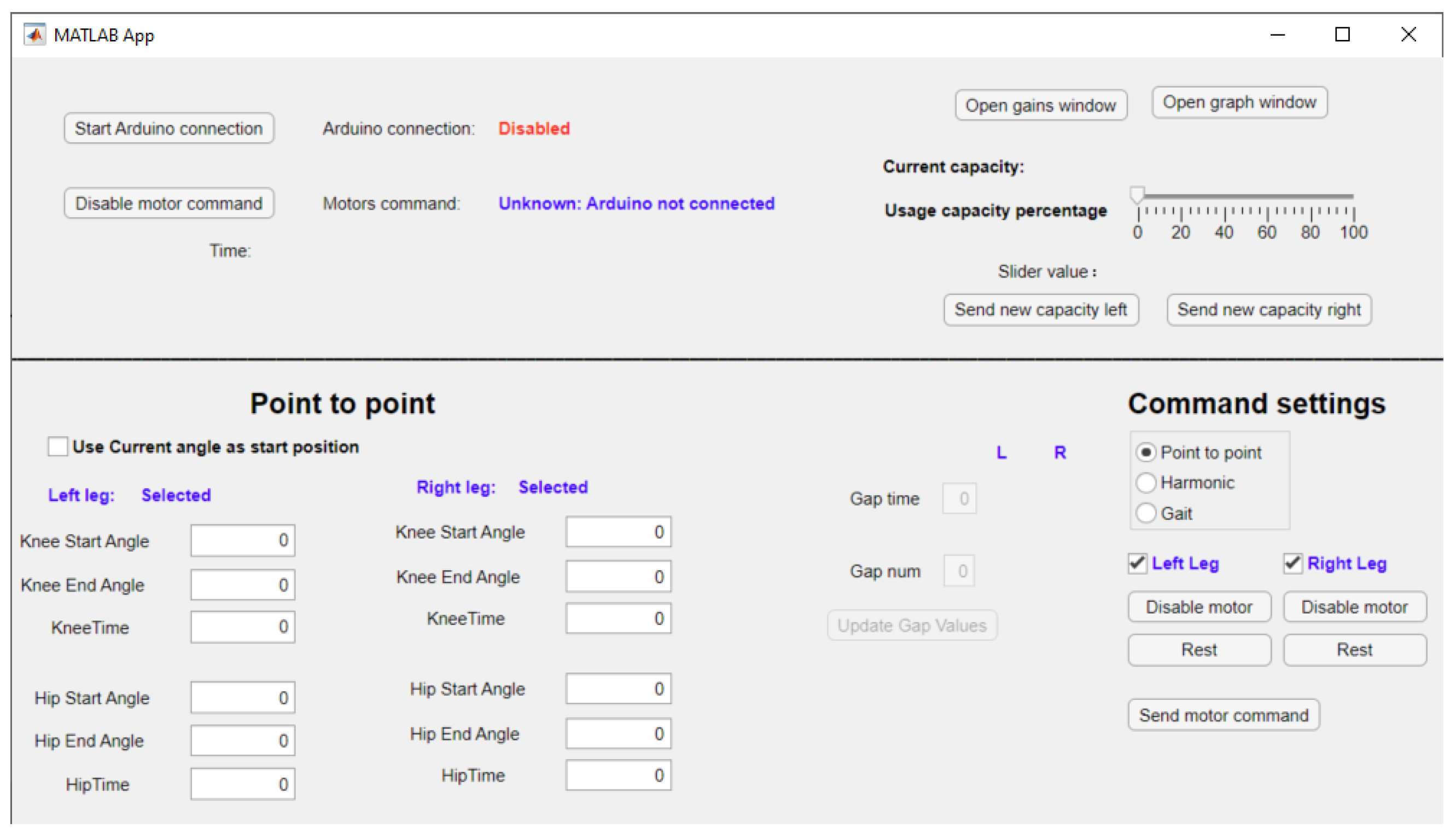
2.2. Hardware and Control Architecture
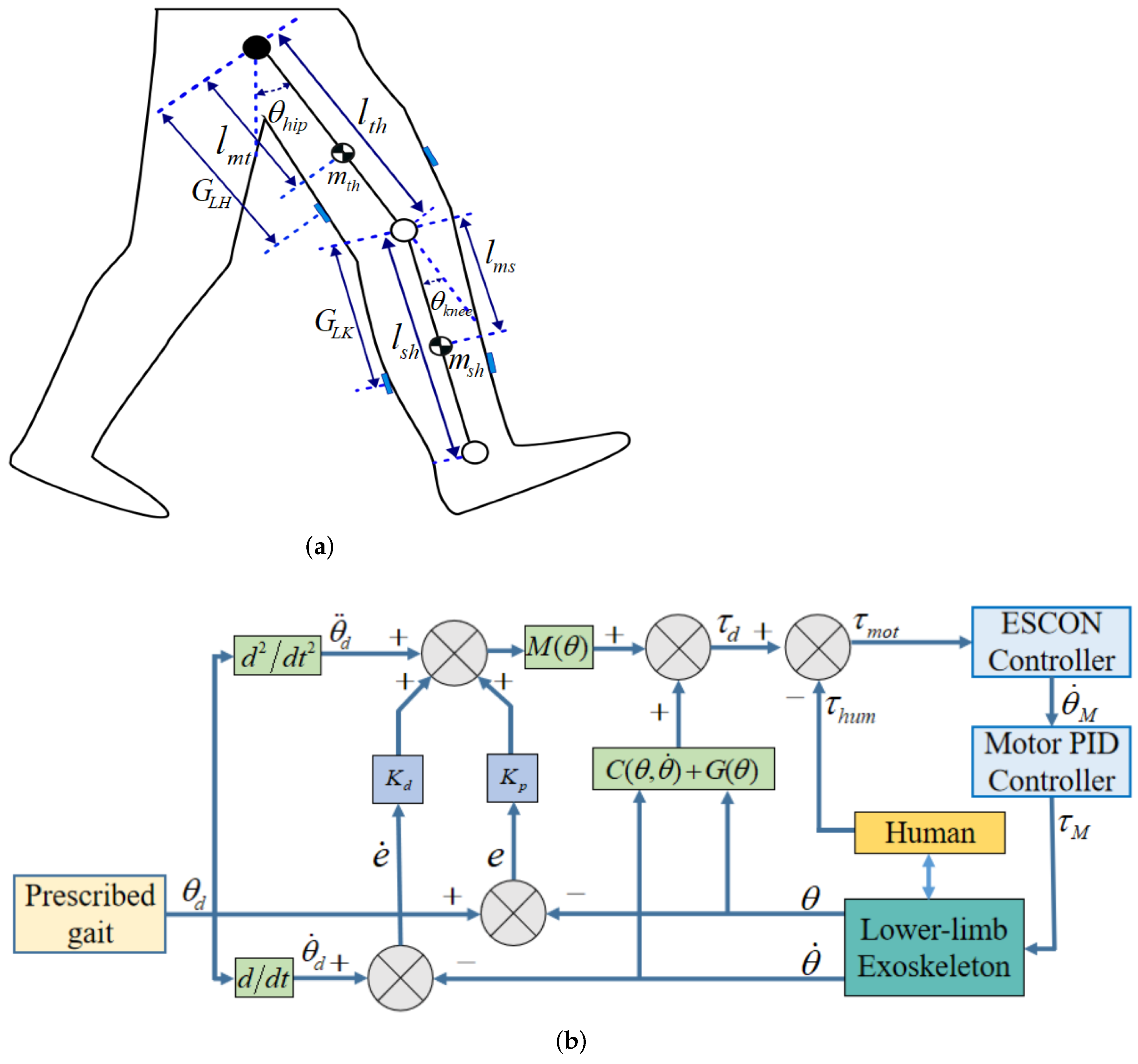
3. Trajectory Control Method
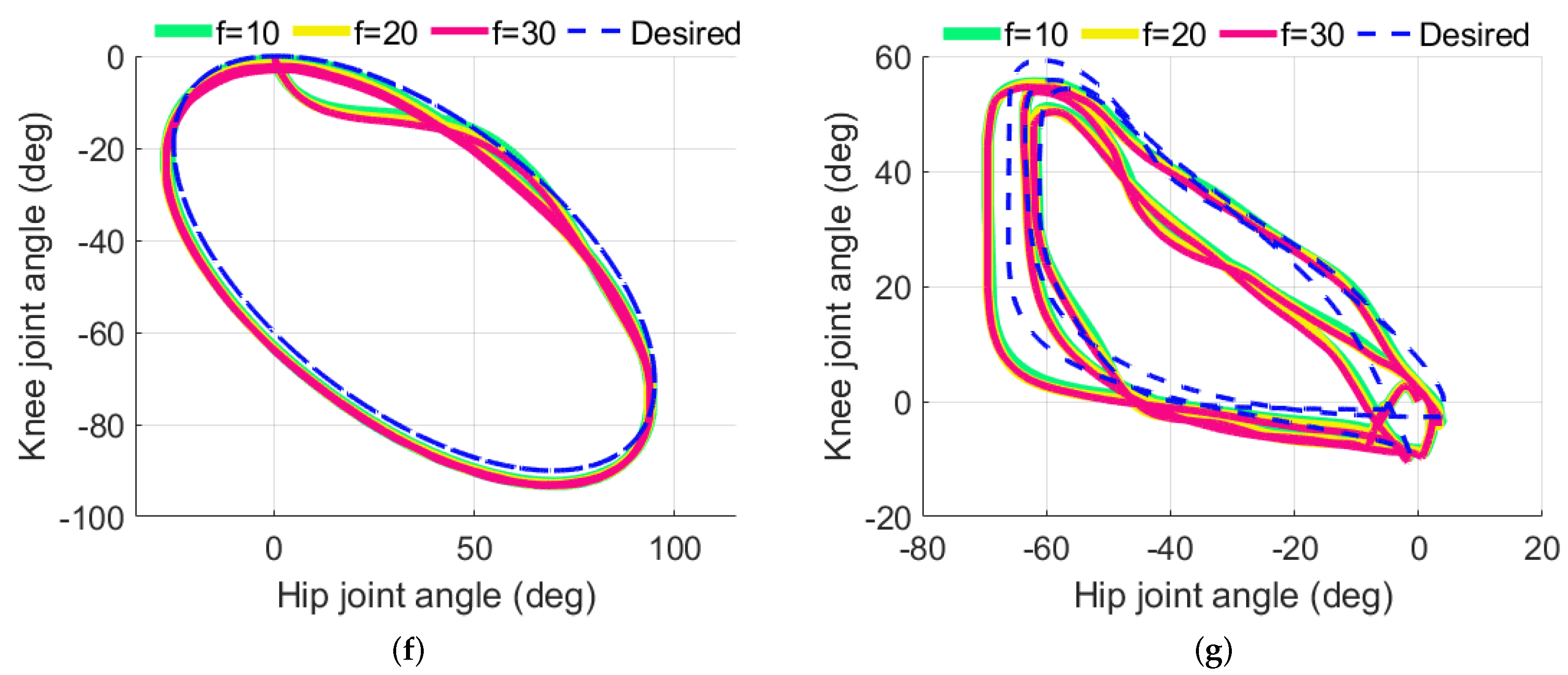
4. Simulations
5. Physical Experiments
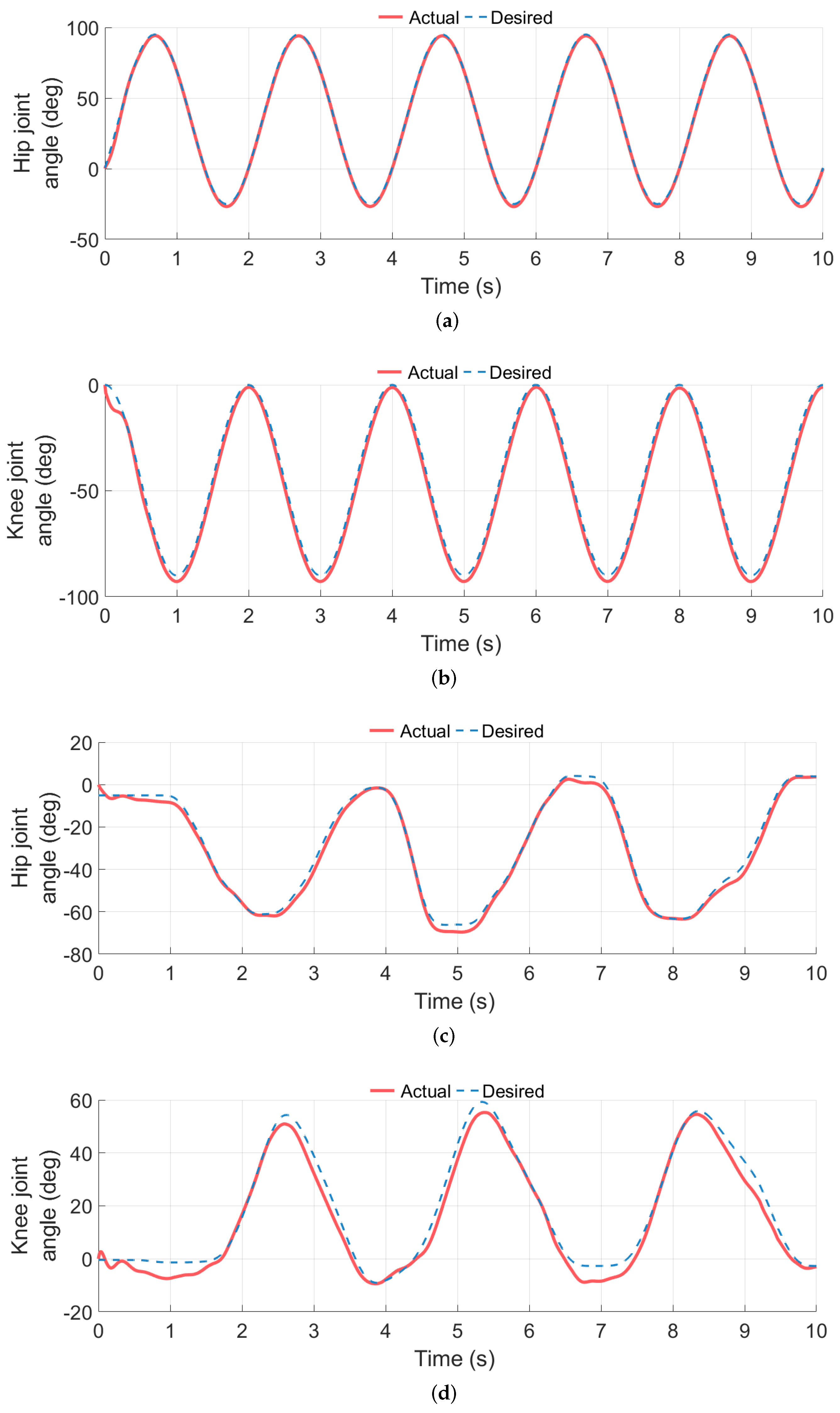
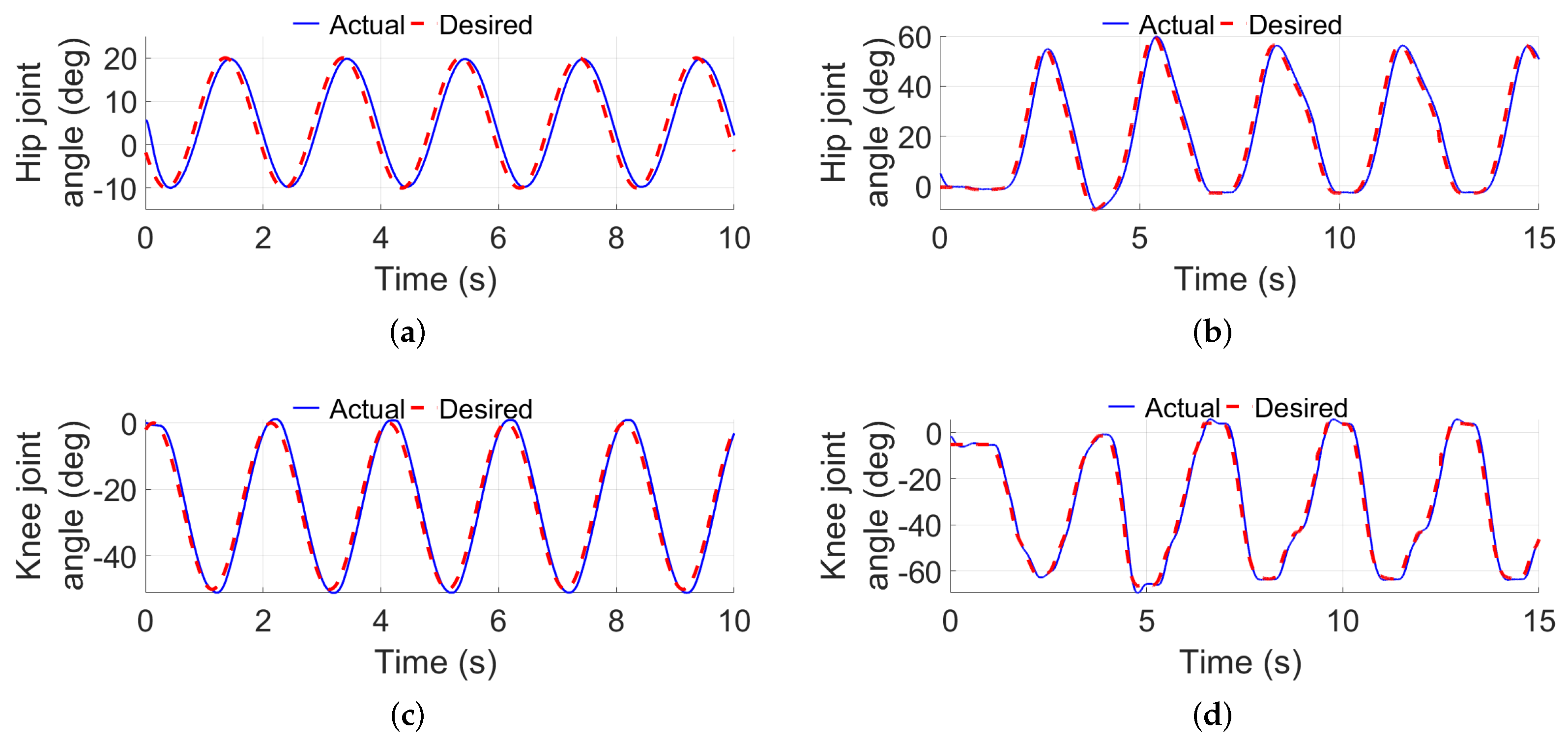
5.1. Trajectory Tracking
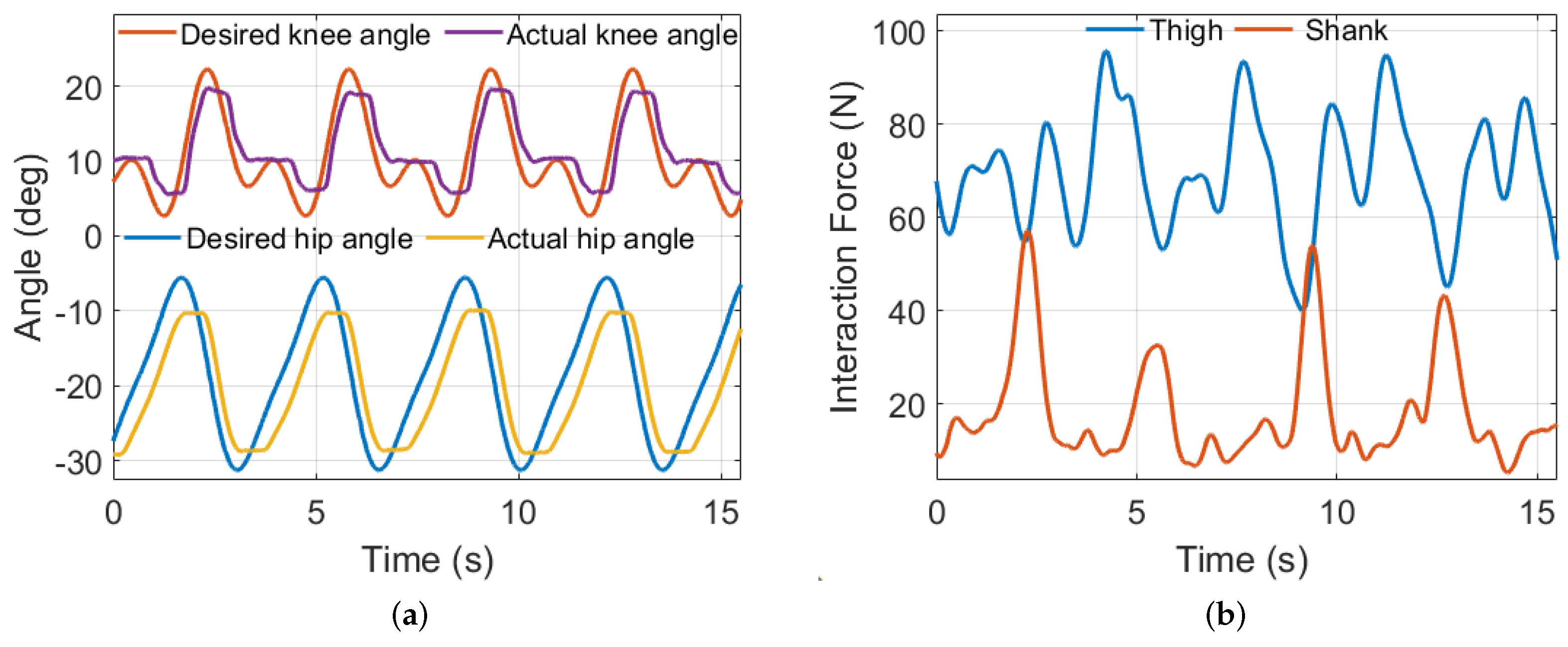
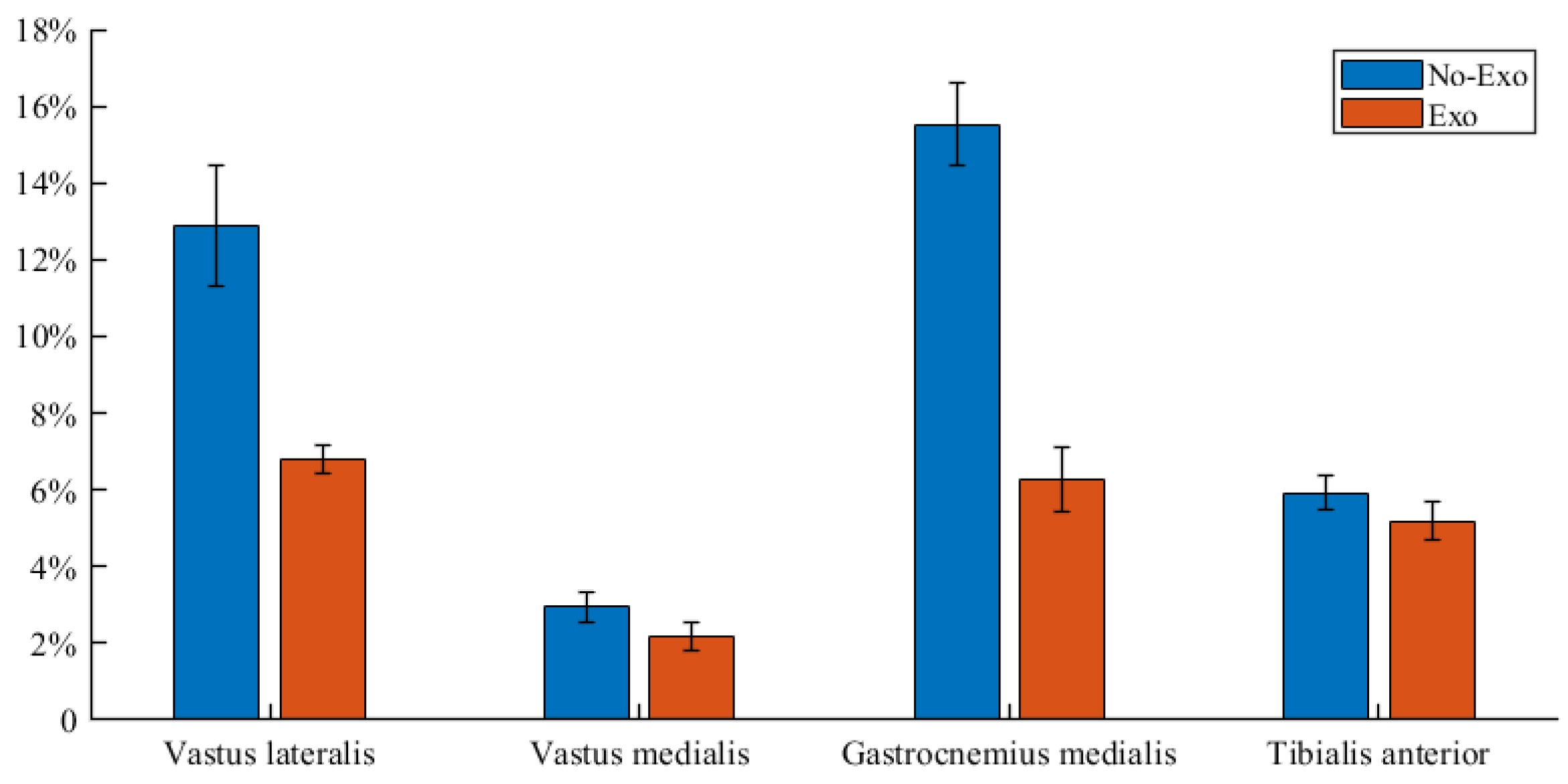
5.2. Walking Assistance Tests
6. Discussion
7. Conclusions
Author Contributions
Funding
Data Availability Statement
Acknowledgments
Conflicts of Interest
Appendix A
References
- Nam, K.Y.; Kim, H.J.; Kwon, B.S.; Park, J.; Lee, H.J.; Yoo, A. Robot-assisted gait training (Lokomat) improves walking function and activity in people with spinal cord injury: A systematic review. J. Neuroeng. Rehabil. 2017, 14, 24. [Google Scholar] [CrossRef] [PubMed]
- Tu, Y.; Zhu, A.; Song, J.; Zhang, X.; Cao, G. Design and experimental evaluation of a lower-limb exoskeleton for assisting workers with motorized tuning of squat heights. IEEE Trans. Neural Syst. Rehabil. Eng. 2022, 30, 184–193. [Google Scholar] [CrossRef] [PubMed]
- Husty, M.; Birlescu, I.; Tucan, P.; Vaida, C.; Pisla, D. An algebraic parameterization approach for parallel robots analysis. Mech. Mach. Theory 2019, 140, 245–257. [Google Scholar] [CrossRef]
- Grazi, L.; Trigili, E.; Proface, G.; Giovacchini, F.; Crea, S.; Vitiello, N. Design and experimental evaluation of a semi-passive upper-limb exoskeleton for workers with motorized tuning of assistance. IEEE Trans. Neural Syst. Rehabil. Eng. 2020, 28, 2276–2285. [Google Scholar] [CrossRef]
- Bai, S.; Virk, G.; Sugar, T. Wearable Exoskeleton Systems: Design, Control and Applications; Institution of Engineering and Technology: London, UK, 2018. [Google Scholar] [CrossRef]
- Von Glinski, A.; Yilmaz, E.; Mrotzek, S.; Marek, E.; Jettkant, B.; Brinkemper, A.; Fisahn, C.; Schildhauer, T.A.; Geßmann, J. Effectiveness of an on-body lifting aid (HAL® for care support) to reduce lower back muscle activity during repetitive lifting tasks. J. Clin. Neurosci. 2019, 63, 249–255. [Google Scholar] [CrossRef] [PubMed]
- Zhang, G.; Wang, J.; Yang, P.; Guo, S. A learning control scheme for upper-limb exoskeleton via adaptive sliding mode technique. Mechatronics 2022, 86, 102832. [Google Scholar] [CrossRef]
- Liu, J.; Zhang, Y.; Wang, J.; Chen, W. Adaptive sliding mode control for a lower-limb exoskeleton rehabilitation robot. In Proceedings of the 2018 13th IEEE Conference on Industrial Electronics and Applications (ICIEA), Wuhan, China, 31 May 2018–2 June 2018; pp. 1481–1486. [Google Scholar] [CrossRef]
- Meijneke, C.; van Oort, G.; Sluiter, V.; van Asseldonk, E.; Tagliamonte, N.L.; Tamburella, F.; Pisotta, I.; Masciullo, M.; Arquilla, M.; Molinari, M.; et al. Symbitron exoskeleton: Design, control, and evaluation of a modular exoskeleton for incomplete and complete spinal cord injured individuals. IEEE Trans. Neural Syst. Rehabil. Eng. 2021, 29, 330–339. [Google Scholar] [CrossRef] [PubMed]
- Tamantini, C.; Cordella, F.; Lauretti, C.; Di Luzio, F.S.; Campagnola, B.; Cricenti, L.; Bravi, M.; Bressi, F.; Draicchio, F.; Sterzi, S.; et al. Tailoring upper-limb robot-aided orthopedic rehabilitation on patients’ psychophysiological state. IEEE Trans. Neural Syst. Rehabil. Eng. 2023, 31, 3297–3306. [Google Scholar] [CrossRef]
- Zhang, L.; Guo, S.; Sun, Q. Development and assist-as-needed control of an end-effector upper limb rehabilitation robot. Appl. Sci. 2020, 10, 6684. [Google Scholar] [CrossRef]
- Islam, M.R.; Assad-Uz-Zaman, M.; Al Zubayer Swapnil, A.; Ahmed, T.; Rahman, M.H. An ergonomic shoulder for robot-aided rehabilitation with hybrid control. Microsyst. Technol. 2021, 27, 159–172. [Google Scholar] [CrossRef]
- Cai, H.; Guo, S.; Yang, Z.; Guo, J. A motor recovery training and evaluation method for the upper limb rehabilitation robotic system. IEEE Sens. J. 2023, 23, 9871–9879. [Google Scholar] [CrossRef]
- Wang, X.; Guo, S.; Song, M.; Wang, P. Mechanical design and experimental verification of a parallel hip exoskeleton with virtual rotation center. In Proceedings of the 2021 6th IEEE International Conference on Advanced Robotics and Mechatronics (ICARM), Chongqing, China, 3–5 July 2021; pp. 230–235. [Google Scholar] [CrossRef]
- Zhou, X.; Yu, Z.; Wang, M.; Chen, D.; Ye, X. Design of control system for lower limb exoskeleton robot. In Proceedings of the 2022 8th International Conference on Control, Automation and Robotics (ICCAR), Xiamen, China, 8–10 April 2022; pp. 122–126. [Google Scholar] [CrossRef]
- Peng, X.; Acosta-Sojo, Y.; Wu, M.I.; Stirling, L. Actuation timing perception of a powered ankle exoskeleton and its associated ankle angle changes during walking. IEEE Trans. Neural Syst. Rehabil. Eng. 2022, 30, 869–877. [Google Scholar] [CrossRef]
- Han, S.; Wang, H.; Tian, Y. Adaptive computed torque control based on RBF network for a lower limb exoskeleton. In Proceedings of the 2018 IEEE 15th International Workshop on Advanced Motion Control (AMC), Tokyo, Japan, 9–11 March 2018; pp. 35–40. [Google Scholar] [CrossRef]
- Véronneau, C.; Lucking Bigué, J.P.; Lussier-Desbiens, A.; Plante, J.S. A high-bandwidth back-drivable hydrostatic power distribution system for exoskeletons based on magnetorheological clutches. IEEE Robot. Autom. Lett. 2018, 3, 2592–2599. [Google Scholar] [CrossRef]
- Galle, S.; Malcolm, P.; Collins, S.H.; De Clercq, D. Reducing the metabolic cost of walking with an ankle exoskeleton: Interaction between actuation timing and power. J. Neuroeng. Rehabil. 2017, 14, 35. [Google Scholar] [CrossRef]
- Aach, M.; Schildhauer, T.A.; Zieriacks, A.; Jansen, O.; Weßling, M.; Brinkemper, A.; Grasmücke, D. Feasibility, safety, and functional outcomes using the neurological controlled Hybrid Assistive Limb exoskeleton (HAL®) following acute incomplete and complete spinal cord injury—Results of 50 patients. J. Spinal Cord Med. 2023, 46, 574–581. [Google Scholar] [CrossRef] [PubMed]
- Zhu, A.; Tu, Y.; Zheng, W.; Shen, H.; Zhang, X. Adaptive control of man-machine interaction force for lower limb exoskeleton rehabilitation robot. In Proceedings of the 2018 IEEE International Conference on Information and Automation (ICIA), Wuyishan, China, 11–13 August 2018; pp. 740–743. [Google Scholar] [CrossRef]
- Gui, K.; Liu, H.; Zhang, D. A generalized framework to achieve coordinated admittance control for multi-joint lower limb robotic exoskeleton. In Proceedings of the 2017 International Conference on Rehabilitation Robotics (ICORR), London, UK, 17–20 July 2017; pp. 228–233. [Google Scholar] [CrossRef]
- Wang, S.; Wang, L.; Meijneke, C.; van Asseldonk, E.; Hoellinger, T.; Cheron, G.; Ivanenko, Y.; La Scaleia, V.; Sylos-Labini, F.; Molinari, M.; et al. Design and control of the MINDWALKER exoskeleton. IEEE Trans. Neural Syst. Rehabil. Eng. 2015, 23, 277–286. [Google Scholar] [CrossRef]
- Kim, J.; Kim, S.J.; Choi, J. Real-time gait phase detection and estimation of gait speed and ground slope for a robotic knee orthosis. In Proceedings of the 2015 IEEE International Conference on Rehabilitation Robotics (ICORR), Singapore, 11–14 August 2015; pp. 392–397. [Google Scholar] [CrossRef]
- Manchola, M.D.S.; Mayag, L.J.A.; Munera, M.; García, C.A.C. Impedance-based backdrivability recovery of a lower-limb exoskeleton for knee rehabilitation. In Proceedings of the 2019 IEEE 4th Colombian Conference on Automatic Control (CCAC), Medellin, Colombia, 15–18 October 2019; pp. 1–6. [Google Scholar] [CrossRef]
- Bortole, M.; Venkatakrishnan, A.; Zhu, F.; Moreno, J.C.; Francisco, G.E.; Pons, J.L.; Contreras-Vidal, J.L. The H2 robotic exoskeleton for gait rehabilitation after stroke: Early findings from a clinical study. J. Neuroeng. Rehabil. 2015, 12, 54. [Google Scholar] [CrossRef]
- Yeung, L.F.; Ockenfeld, C.; Pang, M.K.; Wai, H.W.; Soo, O.Y.; Li, S.W.; Tong, K.Y. Design of an exoskeleton ankle robot for robot-assisted gait training of stroke patients. In Proceedings of the 2017 International Conference on Rehabilitation Robotics (ICORR), London, UK, 17–20 July 2017; pp. 211–215. [Google Scholar] [CrossRef]
- Li, M.; Aoyama, T.; Hasegawa, Y. Gait modification for improving walking stability of exoskeleton assisted paraplegic patient. ROBOMECH J. 2020, 7, 21. [Google Scholar] [CrossRef]
- Lee, H.D.; Park, H.; Seongho, B.; Kang, T.H. Development of a soft exosuit system for walking assistance during stair ascent and descent. Int. J. Control. Autom. Syst. 2020, 18, 2678–2686. [Google Scholar] [CrossRef]
- Kang, I.; Hsu, H.; Young, A. The effect of hip assistance levels on human energetic cost using robotic hip exoskeletons. IEEE Robot. Autom. Lett. 2019, 4, 430–437. [Google Scholar] [CrossRef]
- Koller, J.R.; David Remy, C.; Ferris, D.P. Comparing neural control and mechanically intrinsic control of powered ankle exoskeletons. In Proceedings of the 2017 International Conference on Rehabilitation Robotics (ICORR), London, UK, 17–20 July 2017; pp. 294–299. [Google Scholar] [CrossRef]
- Xu, D.; Liu, X.; Wang, Q. Knee exoskeleton assistive torque control based on real-time gait event detection. IEEE Trans. Med. Robot. Bionics 2019, 1, 158–168. [Google Scholar] [CrossRef]
- Canete, S.; Wilson, E.B.; Jacobs, D.A. Ankle exoskeleton assistance can affect step regulation during self-paced walking. IEEE Trans. Neural Syst. Rehabil. Eng. 2023, 31, 474–483. [Google Scholar] [CrossRef] [PubMed]
- Aljuboury, A.S.; Hameed, A.H.; Ajel, A.R.; Humaidi, A.J.; Alkhayyat, A.; Mhdawi, A.K.A. Robust adaptive control of knee exoskeleton-assistant system based on nonlinear disturbance observer. Actuators 2022, 11, 78. [Google Scholar] [CrossRef]
- Narayan, J.; Dwivedy, S.K. Robust LQR-based neural-fuzzy tracking control for a lower limb exoskeleton system with parametric uncertainties and external disturbances. Appl. Bionics Biomech. 2021, 2021, 5573041. [Google Scholar] [CrossRef] [PubMed]
- Yu, L.; Leto, H.; d’Elbreil, A.; Bai, S. Design and gait control of an active lower limb exoskeleton for walking assistance. In New Trends in Medical and Service Robotics; Springer: Cham, Swizerland, 2023; pp. 127–135. [Google Scholar]
- Christensen, S.; Rafique, S.; Bai, S. Design of a powered full-body exoskeleton for physical assistance of elderly people. Int. J. Adv. Robot. Syst. 2021, 18, 1–15. [Google Scholar] [CrossRef]
- Bai, S.; Islam, M.; Power, V.; OŚullivan, L. User-centered development and performance assessment of a modular full-body exoskeleton (AXO-SUIT). Biomim. Intell. Robot. 2022, 2, 100032. [Google Scholar] [CrossRef]
- Al-Waeli, K.H.; Ramli, R.; Haris, S.M.; Zulkoffli, Z.B.; Amiri, M.S. Offline ANN-PID controller tuning on a multi-joints lower limb exoskeleton for gait rehabilitation. IEEE Access 2021, 9, 107360–107374. [Google Scholar] [CrossRef]
- Yu, L.; Mei, Q.; Xiang, L.; Liu, W.; Mohamad, N.I.; István, B.; Fernandez, J.; Gu, Y. Principal component analysis of the running ground reaction forces with different speeds. Front. Bioeng. Biotechnol. 2021, 9, 629809. [Google Scholar] [CrossRef]
- Divekar, N.V.; Lin, J.; Nesler, C.; Borboa, S.; Gregg, R.D. A potential energy shaping controller with ground reaction force feedback for a multi-activity knee-ankle exoskeleton. In Proceedings of the 2020 8th IEEE RAS/EMBS International Conference for Biomedical Robotics and Biomechatronics (BioRob), New York, NY, USA, 29 November 2020–1 December 2020; pp. 997–1003. [Google Scholar] [CrossRef]
- Amiri, M.S.; Ramli, R.; Ibrahim, M.F. Initialized model reference adaptive control for lower limb exoskeleton. IEEE Access 2019, 7, 167210–167220. [Google Scholar] [CrossRef]
- Nasiri, R.; Shushtari, M.; Arami, A. An adaptive assistance controller to optimize the exoskeleton contribution in rehabilitation. Robotics 2021, 10, 95. [Google Scholar] [CrossRef]
- Durandau, G.; Rampeltshammer, W.F.; Kooij, H.v.d.; Sartori, M. Neuromechanical model-based adaptive control of bilateral ankle exoskeletons: Biological joint torque and electromyogram reduction across walking conditions. IEEE Trans. Robot. 2022, 38, 1380–1394. [Google Scholar] [CrossRef]
- Wang, X.; Yu, H.; Kold, S.; Rahbek, O.; Bai, S. Wearable sensors for activity monitoring and motion control: A review. Biomim. Intell. Robot. 2023, 3, 100089. [Google Scholar] [CrossRef]











{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Joint | Movement | Actuation Type | ROM |
|---|---|---|---|
| Hip | Flexion/Extension | Active | |
| - | Adduction/Abduction | Passive | |
| Knee | Flexion/Extension | Active | |
| Ankle | Dorsiflexion/Plantar Flexion | Passive |
| Description | Thigh/Shank | |
|---|---|---|
| Mass of the segment (kg) | ||
| Length of the segment (m) | ||
| Centroid distance of the segment (m) | ||
| Hip | Knee | |
| 3600 | 6400 | |
| 110 | 140 | |
| 0.18 | 0.175 |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2023 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Yu, L.; Leto, H.; Bai, S. Design and Gait Control of an Active Lower Limb Exoskeleton for Walking Assistance. Machines 2023, 11, 864. https://doi.org/10.3390/machines11090864
Yu L, Leto H, Bai S. Design and Gait Control of an Active Lower Limb Exoskeleton for Walking Assistance. Machines. 2023; 11(9):864. https://doi.org/10.3390/machines11090864
Chicago/Turabian StyleYu, Lingzhou, Harun Leto, and Shaoping Bai. 2023. "Design and Gait Control of an Active Lower Limb Exoskeleton for Walking Assistance" Machines 11, no. 9: 864. https://doi.org/10.3390/machines11090864
APA StyleYu, L., Leto, H., & Bai, S. (2023). Design and Gait Control of an Active Lower Limb Exoskeleton for Walking Assistance. Machines, 11(9), 864. https://doi.org/10.3390/machines11090864