

Wind/Wave Testing of a 1:70-Scale Performance-Matched Model of the IEA Wind 15 MW Reference Wind Turbine with Real-Time ROSCO Control and Floating Feedback

 , , , ,
, , , , 
Abstract
:1. Introduction
2. Materials and Methods
2.1. Model Description

{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Property | Unit | Value |
|---|---|---|
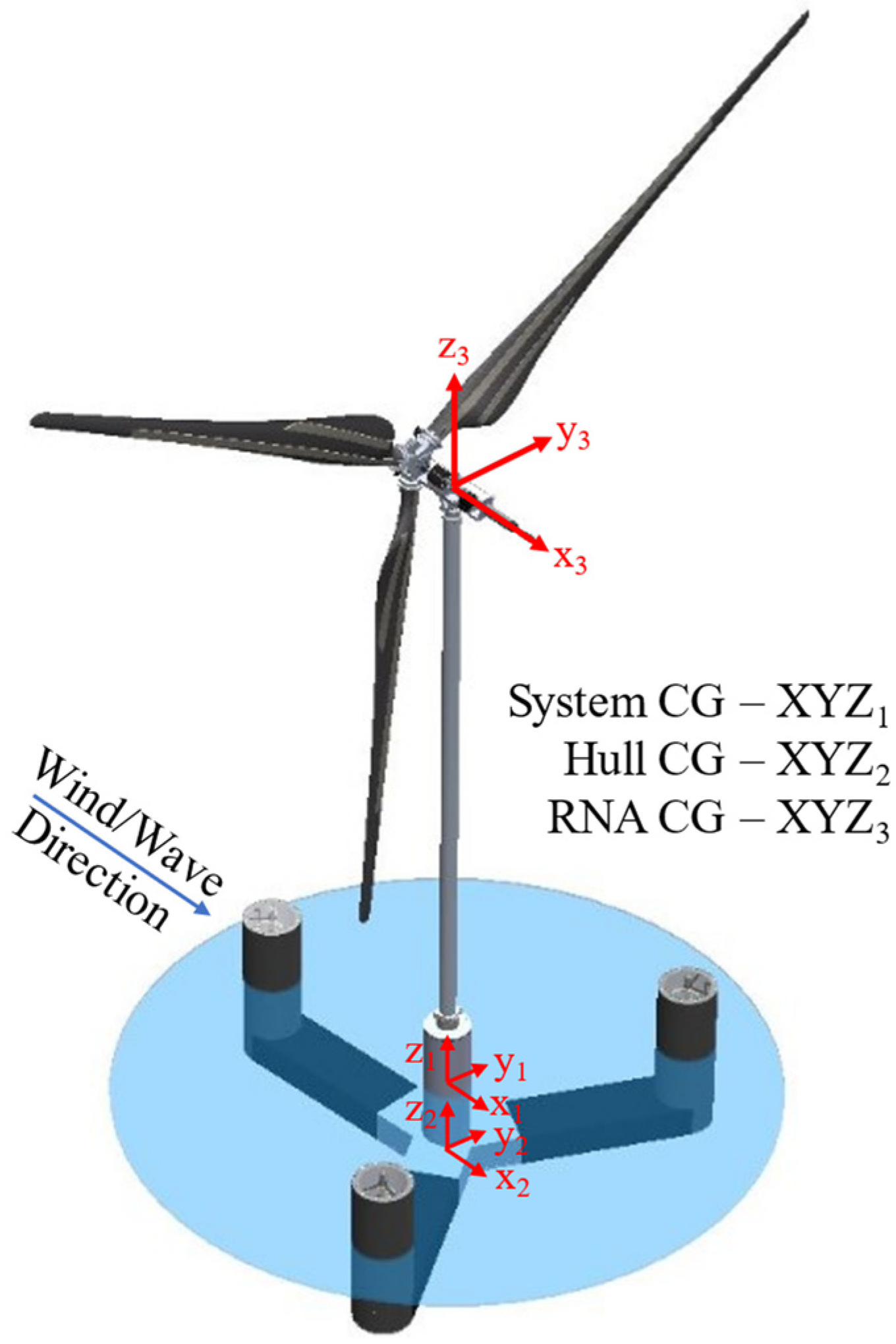
| Total System Properties (XYZ1 Coordinate System *) | ||
| Mass | kg | 2.073 × 107 |
| Center of gravity (CG)–Height from keel | m | 19.1 |
| CG–X offset | m | 0.2 |
| CG–Y offset | m | −0.5 |
| Ixx (Roll Inertia) about system CG | kg·m2 | 4.937 × 1010 |
| Iyy (Pitch Inertia) about system CG | kg·m2 | 4.972 × 1010 |
| Hull Properties (XYZ2 Coordinate System *) | ||
| Mass | kg | 1.866 × 107 |
| CG–Height from Keel | m | 6.9 |
| CG–X Offset | m | 0.1 |
| CG–Y Offset | m | −0.6 |
| Ixx (Roll Inertia) about hull CG | kg·m2 | 1.353 × 1010 |
| Iyy (Pitch Inertia) about hull CG | kg·m2 | 1.402 × 1010 |
| Izz (Yaw Inertia) about hull CG | kg·m2 | 1.52 × 1010 |
| Rotor Nacelle Assembly Properties (XYZ3 Coordinate System *) | ||
| Mass | kg | 1.197 × 106 |
| CG–Height from keel | m | 168.7 |
| CG–X Offset | m | −4.4 |
| Ixx (Roll Inertia) about RNA CG | kg·m2 | 6.751 × 108 |
| Iyy (Pitch Inertia) about RNA CG | kg·m2 | 3.723 × 108 |

2.2. Wind Environment
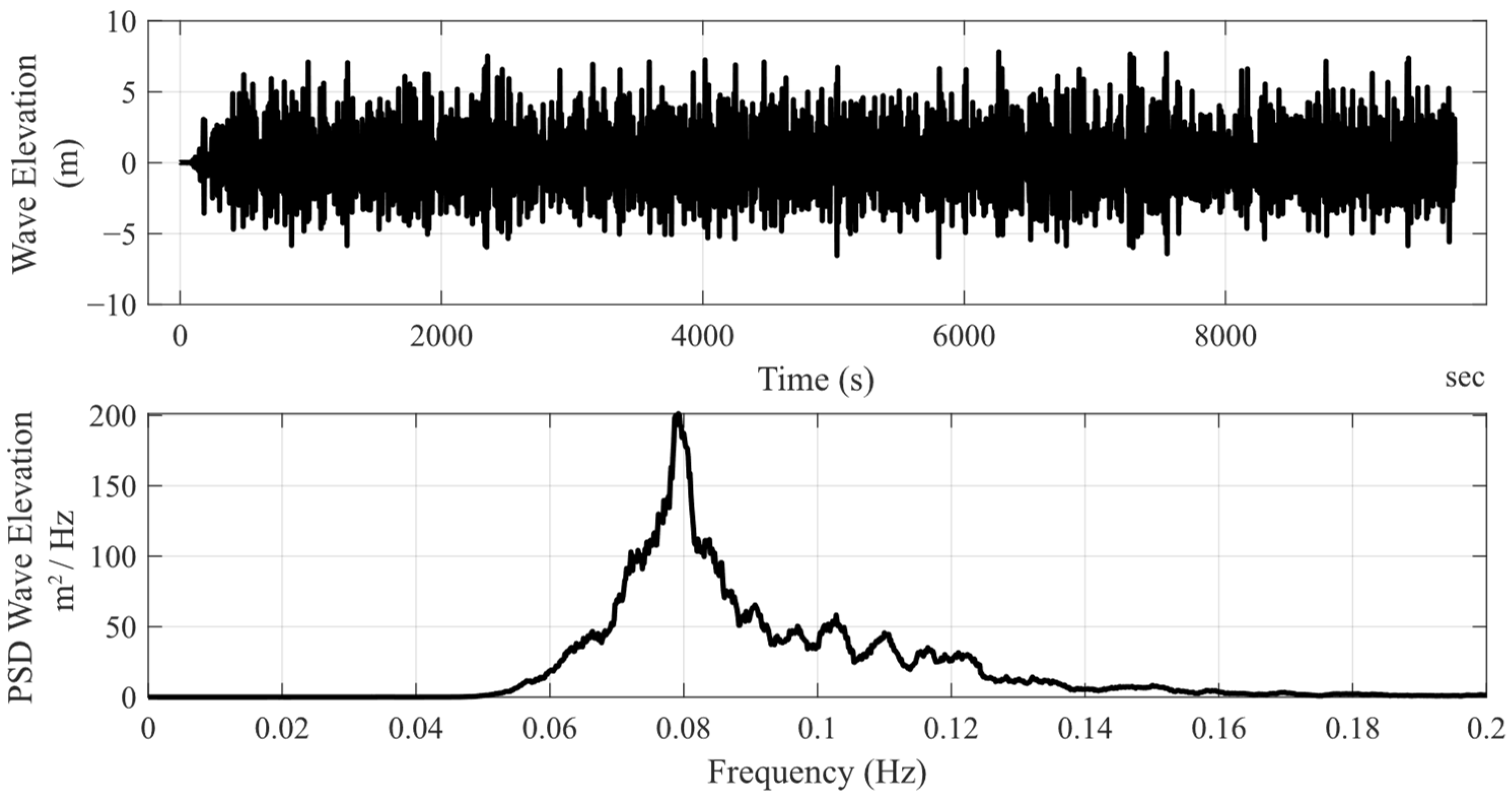
2.3. Wave Environment
2.4. Mooring
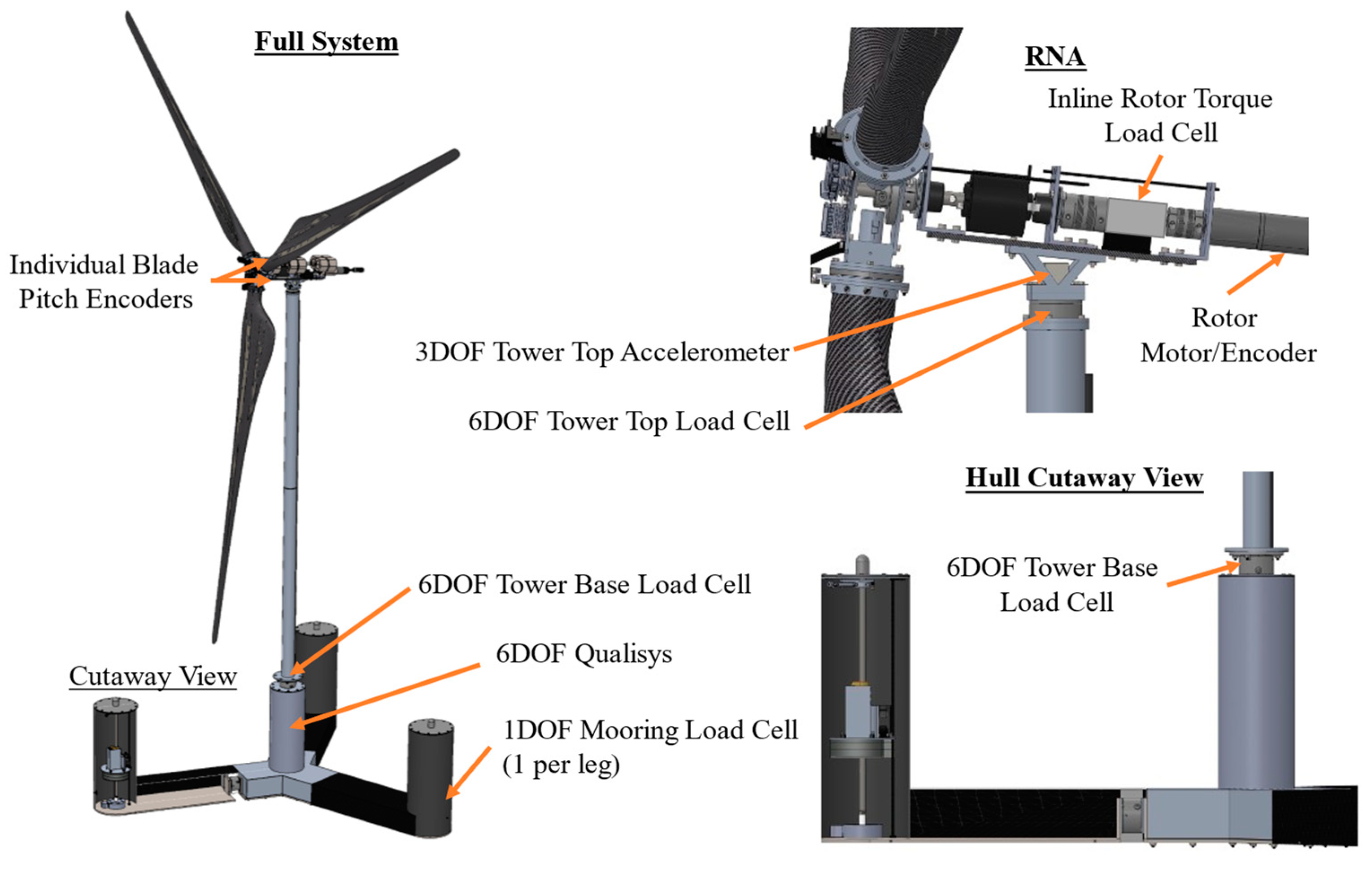
2.5. Instrumentation
3. Results
3.1. Free Decay
3.2. Above Rated Conditions
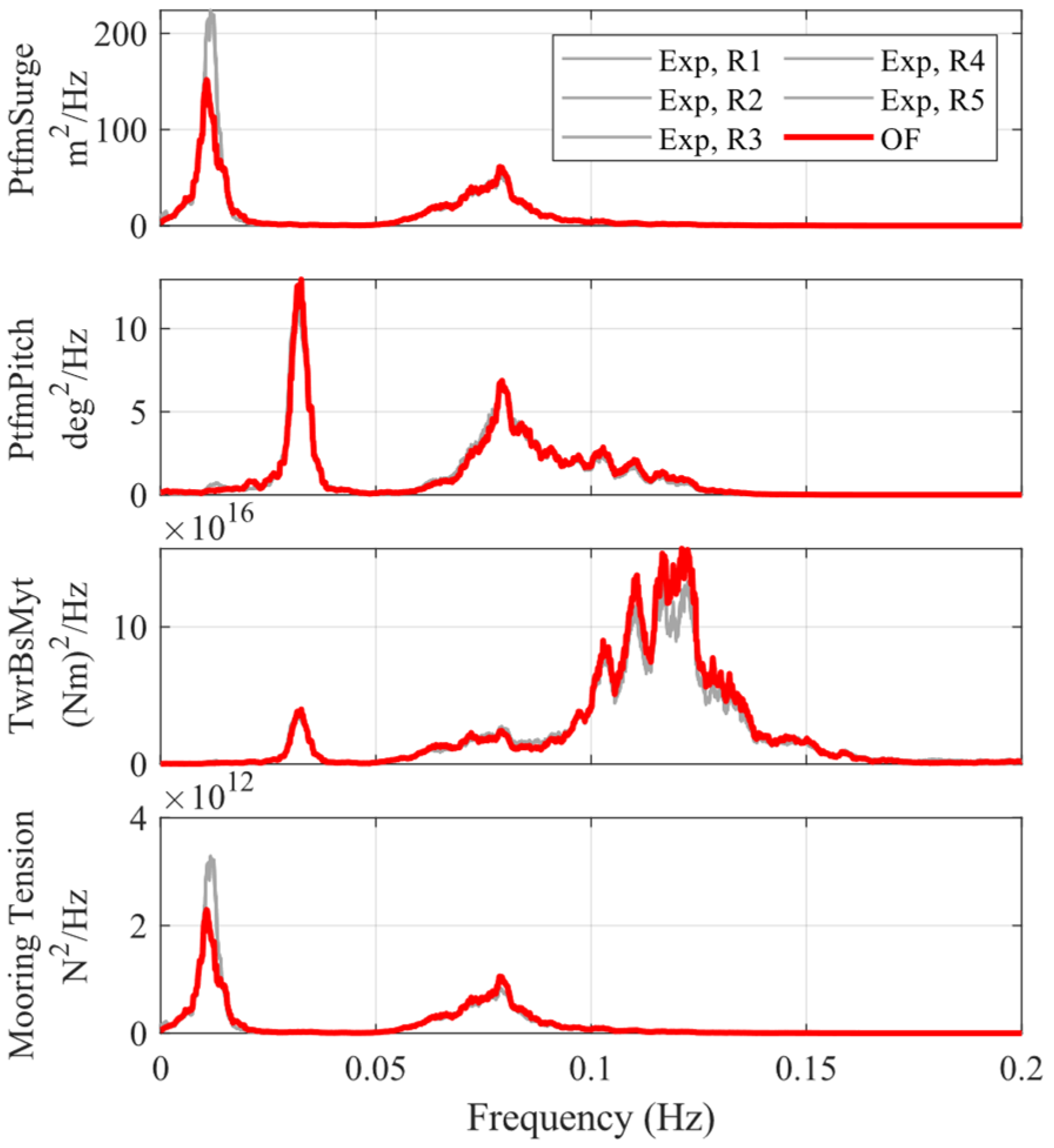
3.3. Wave Only
3.4. Wind Only
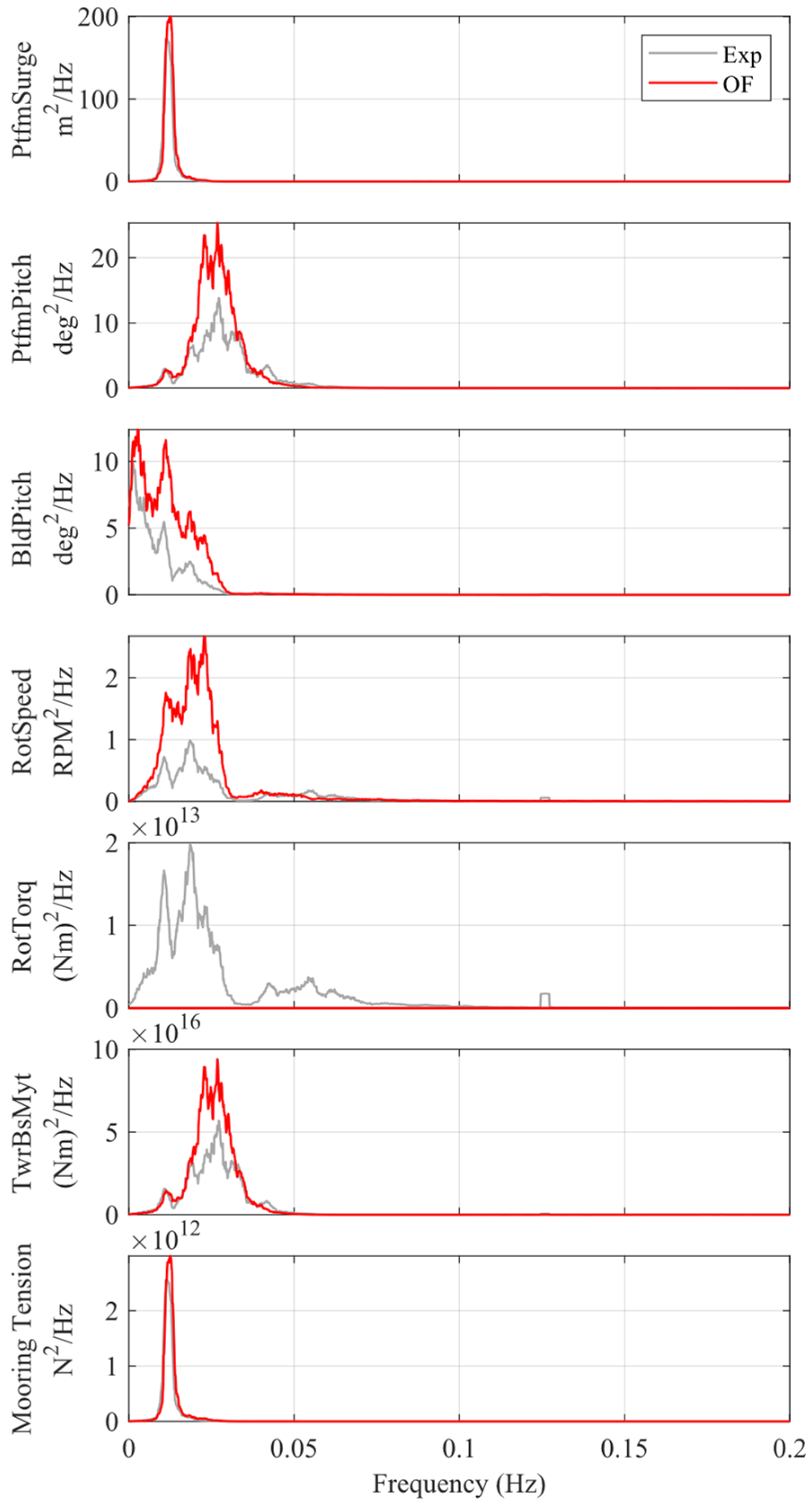
3.5. Combined Wind and Wave
3.5.1. Baseline ROSCO
3.5.2. ROSCO with Floating Feedback
4. Discussion
4.1. Surge Resonant Response
4.2. Effect of ROSCO above Rated Torque Control
4.3. Performance of Floating Feedback Control Loop
5. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Acknowledgments
Conflicts of Interest
References
- Robertson, A. FOCAL Campaign IV: Integrated System Control: Turbine + Hull; Atmosphere to Electrons (A2e) Data Archive and Portal; Pacific Northwest National Lab. (PNNL): Richland, WA, USA, 2023. [Google Scholar] [CrossRef]
- Koo, B.J.; Goupee, A.J.; Kimball, R.W.; Lambrakos, K.F. Model Tests for a Floating Wind Turbine on Three Different Floaters. J. Offshore Mech. Arct. Eng. 2014, 136, 020907. [Google Scholar] [CrossRef]
- Azcona, J.; Bekiropoulos, D.; Bredmose, H.; Heilskov, N.; Krieger, A.; Lutz, T.; Manjock, A.; Manolas, D.; Matha, D.; Meister, K.; et al. D4.21: State-of-the-Art and Implementation of Design Tools for Floating Structures; Technical Report. 2013. Available online: http://www.innwind.eu/-/media/sites/innwind/publications/deliverables/deliverabled4-21_final_innwind-eu.pdf (accessed on 7 July 2023).
- Guanche, R.; Somoano, M.; Battistella, T.; Rodriguez, A.; Fernandez, S.; Sarmiento, J.; Alvarez, A.; Blanco, D.; Facchinetti, A.; Fontanella, A.; et al. D5.3 Integrated FOWT Test Report; Zenodo: Honolulu, HI, USA, 2023. [Google Scholar] [CrossRef]
- Gueydon, S.; Bayati, I.; de Ridder, E.J. Discussion of Solutions for Basin Model Tests of FOWTs in Combined Waves and Wind. Ocean. Eng. 2020, 209, 107288. [Google Scholar] [CrossRef]
- Sauder, T.; Chabaud, V.; Thys, M.; Bachynski, E.E.; Sæther, L.O. Real-Time Hybrid Model Testing of a Braceless Semi-Submersible Wind Turbine: Part I—The Hybrid Approach; American Society of Mechanical Engineers Digital Collection: New York, NY, USA, 2016. [Google Scholar] [CrossRef]
- Battistella, T.; Paradinas, D.D.L.D.; Urbán, A.M.; Garcia, R.G. High Fidelity Simulation of Multi-MW Rotor Aerodynamics by Using a Multifan. In Volume 10: Ocean Renewable Energy; American Society of Mechanical Engineers: Madrid, Spain, 2018; p. V010T09A074. [Google Scholar] [CrossRef]
- Fontanella, A.; Liu, Y.; Azcona, J.; Pires, O.; Bayati, I.; Gueydon, S.; de Ridder, E.J.; van Wingerden, J.W.; Belloli, M. A Hardware-in-the-Loop Wave-Basin Scale-Model Experiment for the Validation of Control Strategies for Floating Offshore Wind Turbines. J. Phys. Conf. Ser. 2020, 1618, 032038. [Google Scholar] [CrossRef]
- Bayati, I.; Belloli, M.; Facchinetti, A.; Giappino, S. Wind Tunnel Tests on Floating Offshore Wind Turbines. Wind Eng. 2013, 37, 557–568. [Google Scholar] [CrossRef]
- Bayati, I.; Bernini, L.; Facchinetti, A.; Fontanella, A.; Giberti, H.; Zasso, A.; Belloli, M. Hybrid HIL Testing of Floating Wind Turbines Within LIFES50+ Project. In Proceedings of the XV Conference of the Italian Association for Wind Engineering; Ricciardelli, F., Avossa, A.M., Eds.; Springer International Publishing: Cham, Switzerland, 2019; Volume 27, pp. 99–109. [Google Scholar] [CrossRef]
- Manjock, A. D4.22: Methods for Performing Scale-Tests for Method and Model Validation of Floating Wind Turbines; Technical Report. 2016. Available online: http://www.innwind.eu/-/media/sites/innwind/publications/deliverables/deliverabled4-22-rev02l_innwind-eu.pdf (accessed on 7 July 2023).
- Facchinetti, A.; Di Carlo, S.; Fontanella, A.; Guanche, R.; Battistella, T.; Somoano, M.; Sarmiento, J.; Rodriguez, A. HIL 15MW Development; Technical Report D5.1. 2020. Available online: https://corewind.eu/wp-content/uploads/files/delivery-docs/D5.1.pdf (accessed on 7 July 2023).
- Azcona, J.; Lemmer, F.; Matha, D.; Amann, F.; Bottasso, C.; Montinari, P.; Chassapoyannis, P.; Diakakis, K.; Voutsinas, S.; Pereira, R.; et al. D4.24—Results of Wave Tank Tests; Technical Report D4.2.4. 2016. Available online: http://www.innwind.eu/-/media/sites/innwind/publications/deliverables/230117/d4-24_final_v2.pdf (accessed on 7 July 2023).
- Bachynski, E.E.; Thys, M.; Sauder, T.; Chabaud, V.; Sæther, L.O. Real-Time Hybrid Model Testing of a Braceless Semi-Submersible Wind Turbine: Part II—Experimental Results; American Society of Mechanical Engineers Digital Collection: New York, NY, USA, 2016. [Google Scholar] [CrossRef]
- Jonkman, J.; Butterfield, S.; Musial, W.; Scott, G. Definition of a 5-MW Reference Wind Turbine for Offshore System Development; NREL/TP-500-38060; National Renewable Energy Lab. (NREL): Golden, CO, USA, 2009. [Google Scholar] [CrossRef]
- Thys, M.; Chabaud, V.; Sauder, T.; Eliassen, L.; Sæther, L.O.; Magnussen, Ø.B. Real-Time Hybrid Model Testing of a Semi-Submersible 10MW Floating Wind Turbine and Advances in the Test Method; American Society of Mechanical Engineers Digital Collection: New York, NY, USA, 2018. [Google Scholar] [CrossRef]
- Cao, Q.; Xiao, L.; Cheng, Z.; Liu, M. An Experimental Study on Dynamic Behavior of a New Concept of 10MW Semi-Submersible Wind Turbine; OnePetro: Richardson, TX, USA, 2020. [Google Scholar]
- Bredmose, H.; Lemmer, F.; Borg, M.; Pegalajar-Jurado, A.; Mikkelsen, R.F.; Larsen, T.S.; Fjelstrup, T.; Yu, W.; Lomholt, A.K.; Boehm, L.; et al. The Triple Spar Campaign: Model Tests of a 10MW Floating Wind Turbine with Waves, Wind and Pitch Control. Energy Procedia 2017, 137, 58–76. [Google Scholar] [CrossRef]
- Ransley, E.J.; Brown, S.A.; Edwards, E.C.; Tosdevin, T.; Monk, K.; Reynolds, A.M.; Greaves, D.; Hann, M.R. Real-Time Hybrid Testing of a Floating Offshore Wind Turbine Using a Surrogate-Based Aerodynamic Emulator. ASME Open J. Eng. 2023, 2, 021017. [Google Scholar] [CrossRef]
- Gaertner, E.; Rinker, J.; Sethuraman, L.; Zahle, F.; Anderson, B.; Barter, G.; Abbas, N.; Meng, F.; Bortolotti, P.; Skrzypinksi, W.; et al. Definition of the IEA 15-Megawatt Offshore Reference Wind Turbine; Technical Report NREL/TP-5000-75698; National Renewable Energy Laboratory: Golden, CO, USA, 2020. Available online: https://www.nrel.gov/docs/fy20osti/75698.pdf (accessed on 17 March 2020).
- Abbas, N.J.; Zalkind, D.S.; Pao, L.; Wright, A. A Reference Open-Source Controller for Fixed and Floating Offshore Wind Turbines. Wind Energy Sci. 2022, 7, 53–73. [Google Scholar] [CrossRef]
- Jonkman, B.; Mudafort, R.M.; Platt, A.; Branlard, E.; Sprague, M.; Ross, H.; Jjonkman; HaymanConsulting; Hall, M.; Slaughter, D.; et al. OpenFAST/Openfast: V3.5.0; Zenodo: Honolulu, HI, USA, 2023. [Google Scholar] [CrossRef]
- Jonkman, J. Fast V8. 2016. Available online: https://www.nrel.gov/wind/nwtc/fastv8.html (accessed on 7 July 2023).
- Robertson, A.; Jonkman, J.; Masciola, M.; Song, H.; Goupee, A.; Coulling, A.; Luan, C. Definition of the Semisubmersible Floating System for Phase II of OC4; NREL/TP-5000-60601; National Renewable Energy Lab. (NREL): Golden, CO, USA, 2014; p. 1155123. [Google Scholar] [CrossRef]
- Robertson, A.N.; Wendt, F.; Jonkman, J.M.; Popko, W.; Dagher, H.; Gueydon, S.; Qvist, J.; Vittori, F.; Azcona, J.; Uzunoglu, E.; et al. OC5 Project Phase II: Validation of Global Loads of the DeepCwind Floating Semisubmersible Wind Turbine. Energy Procedia 2017, 137, 38–57. [Google Scholar] [CrossRef]
- Wendt, F.F.; Robertson, A.N.; Jonkman, J.M. FAST Model Calibration and Validation of the OC5-DeepCwind Floating Offshore Wind System Against Wave Tank Test Data. Int. J. Offshore Polar Eng. 2019, 29, 15–23. [Google Scholar] [CrossRef]
- Mendoza, N.; Robertson, A.; Wright, A.; Jonkman, J.; Wang, L.; Bergua, R.; Ngo, T.; Das, T.; Odeh, M.; Mohsin, K.; et al. Verification and Validation of Model-Scale Turbine Performance and Control Strategies for the IEA Wind 15 MW Reference Wind Turbine. Energies 2022, 15, 7649. [Google Scholar] [CrossRef]
- Wang, L.; Bergua, R.; Jonkman, J.; Ngo, T.; Das, T.; Sarker, D.; Flavia, F.F.; Harries, R.; Fowler, M.; Lenfest, E.; et al. Validation of Model Predictions of the Influence from Hull-Based Tuned Mass Dampers on the Dynamics of a Floating Wind Semisubmersible Platform. DeepWind, 2023; submitted. [Google Scholar]
- Wang, L.; Bergua, R.; Robertson, A.; Wright, A.; Zalkind, D.; Fowler, M.; Lenfest, E.; Viselli, A.; Goupee, A.; Kimball, R. Experimental Investigation of Advanced Turbine Control Strategies and Load-Mitigation Measures with a Model-Scale Floating Offshore Wind Turbine System. Appl. Energy, 2023; submitted. [Google Scholar]
- Kimball, R.; Robertson, A.; Fowler, M.; Mendoza, N.; Wright, A.; Goupee, A.; Lenfest, E.; Parker, A. Results from the FOCAL Experiment Campaign 1: Turbine Control Co-Design. J. Phys. Conf. Ser. 2022, 2265, 022082. [Google Scholar] [CrossRef]
- Bayati, I.; Belloli, M.; Bernini, L. D3.1—AeroDyn Validated Model; Technical Report D3.1. 2016. Available online: https://lifes50plus.eu/wp-content/uploads/2015/11/GA_640741_LIFES50_D3.1-merged.pdf (accessed on 7 July 2023).
- Wang, L.; Robertson, A.; Jonkman, J.; Kim, J.; Shen, Z.-R.; Koop, A.; Borràs Nadal, A.; Shi, W.; Zeng, X.; Ransley, E.; et al. OC6 Phase Ia: CFD Simulations of the Free-Decay Motion of the DeepCwind Semisubmersible. Energies 2022, 15, 389. [Google Scholar] [CrossRef]
- WAMIT, Inc. User Manual, V7. 2016. Available online: http://www.wamit.com/manual.htm/ (accessed on 7 July 2023).
- Kimball, R.W.; Goupee, A.J.; Coulling, A.J.; Dahger, H.J. Model Test Comparisons of TLP, Spar-Buoy and Semi-Submersible Floating Offshore Wind Turbine Systems; OnePetro: Richardson, TX, USA, 2012. [Google Scholar] [CrossRef]
- Coulling, A.J.; Goupee, A.J.; Robertson, A.N.; Jonkman, J.M.; Dagher, H.J. Validation of a FAST Semi-Submersible Floating Wind Turbine Numerical Model with DeepCwind Test Data. J. Renew. Sustain. Energy 2013, 5, 023116. [Google Scholar] [CrossRef]
- Gueydon, S.; Duarte, T.; Jonkman, J. Comparison of Second-Order Loads on a Semisubmersible Floating Wind Turbine. In Volume 9A: Ocean Renewable Energy; American Society of Mechanical Engineers: San Francisco, CA, USA, 2014; p. V09AT09A024. [Google Scholar] [CrossRef]
- Kvittem, M.I.; Berthelsen, P.A.; Eliassen, L.; Thys, M. Calibration of Hydrodynamic Coefficients for a Semi-Submersible 10 MW Wind Turbine; American Society of Mechanical Engineers Digital Collection: New York, NY, USA, 2018. [Google Scholar] [CrossRef]
- Berthelsen, P.A.; Bachynski, E.E.; Karimirad, M.; Thys, M. Real-Time Hybrid Model Tests of a Braceless Semi-Submersible Wind Turbine: Part III—Calibration of a Numerical Model; American Society of Mechanical Engineers Digital Collection: New York, NY, USA, 2016. [Google Scholar] [CrossRef]
- Pegalajar-Jurado, A.; Bredmose, H. Reproduction of Slow-Drift Motions of a Floating Wind Turbine Using Second-Order Hydrodynamics and Operational Modal Analysis. Mar. Struct. 2019, 66, 178–196. [Google Scholar] [CrossRef]
- Wang, L.; Robertson, A.; Jonkman, J.; Yu, Y.-H. OC6 Phase I: Improvements to the OpenFAST Predictions of Nonlinear, Low-Frequency Responses of a Floating Offshore Wind Turbine Platform. Renew. Energy 2022, 187, 282–301. [Google Scholar] [CrossRef]
- Coulling, A.J.; Goupee, A.J.; Robertson, A.N.; Jonkman, J.M. Importance of Second-Order Difference-Frequency Wave-Diffraction Forces in the Validation of a FAST Semi-Submersible Floating Wind Turbine Model; American Society of Mechanical Engineers Digital Collection: New York, NY, USA, 2013. [Google Scholar] [CrossRef]
- Goupee, A.J.; Kimball, R.W.; Dagher, H.J. Experimental Observations of Active Blade Pitch and Generator Control Influence on Floating Wind Turbine Response. Renew. Energy 2017, 104, 9–19. [Google Scholar] [CrossRef]
- Souza, C.E.S.; Bachynski, E.E. Changes in Surge and Pitch Decay Periods of Floating Wind Turbines for Varying Wind Speed. Ocean. Eng. 2019, 180, 223–237. [Google Scholar] [CrossRef]











| Wave ID | Significant Wave Height, Hs [m] | Peak Period, Tp [s] | γ [-] |
|---|---|---|---|
| E21–E25 | 8.1 | 12.8 | 2.75 |
| Degree of Freedom | Experiment | OpenFAST |
|---|---|---|
| Surge [N·m−1] | 217,863 | 211,420 |
| Sway [N·m−1] | 224,008 | 221,232 |
| Line ID | Line Location | EA [N] | Unstretched Length [m] | Number of Segments [-] |
|---|---|---|---|---|
| 1 | Port | 33,862,500 | 268.75 | 15 |
| 2 | Starboard | 33,816,290 | 266.27 | 15 |
| 3 | Bow (Lead Line) | 12,285,240 | 99.88 | 15 |
| Channel | Experiment Source | OpenFAST Channel | Notes |
|---|---|---|---|
| Platform Surge | Qualisys 6DOF Motion | PtfmSurge | Rigid body motion |
| Platform Pitch | Qualisys 6DOF Motion | PtfmPitch | Rigid body motion |
| Rotor Torque | Inline Torque Sensor | RotTorq | Low-speed shaft torque |
| Rotor Speed | Rotor Encoder | RotSpeed | 1:1 Gearbox |
| Blade Pitch | Blade Pitch Encoder | BldPitch1 | Collective blade pitch |
| Tower Base Moment | 6DOF Load Cell | TwrBsMyt | Pitch moment |
| Mooring Fairlead Tension | 1DOF Inline Load Cell | FAIRTEN3 | Lead line tension |
| Degree of Freedom | Linear Stiffness | Linear Damping | Quadratic Damping | |
|---|---|---|---|---|
| Surge | [N·m−1 or N·(m·s−1)−1 or N·(m·s−1)−2] | 6.9 × 103 | 1.6 × 105 | 1.0 × 106 |
| Sway | [N·(m·s−1)−1 or N·(m·s−1)−2] | N/A | 1.6 × 105 | 1.0 × 106 |
| Heave | [N·m−1 or N·(m·s−1)−1 or N·(m·s−1)−2] | 3.2 × 104 | 0.0 | 6.6 × 106 |
| Roll | [N·m·rad−1 or N·m·(rad·s−1)−2] | N/A | 2.7 × 108 | 7.2 × 1010 |
| Pitch | [N·m·rad−1 or N·m·(rad·s−1)−2] | N/A | 2.7 × 108 | 7.2 × 1010 |
| Yaw | [N·m·rad−1 or N·m·(rad·s−1)−2] | N/A | 0.0 | 7.2 × 1010 |
| Degree of Freedom | Experiment | OpenFAST | ||
|---|---|---|---|---|
| Period * [s] | Frequency [Hz] | Period * [s] | Frequency [Hz] | |
| Surge | 80.8 | 0.0124 | 79.2 | 0.0126 |
| Sway | 79.6 | 0.0126 | 78.1 | 0.0128 |
| Heave | 21.2 | 0.0473 | 20.6 | 0.0486 |
| Roll | 31.1 | 0.0322 | 30.1 | 0.0333 |
| Pitch | 30.8 | 0.0325 | 30.0 | 0.0333 |
| Yaw | 50.94 | 0.0196 | 46.05 | 0.0217 |
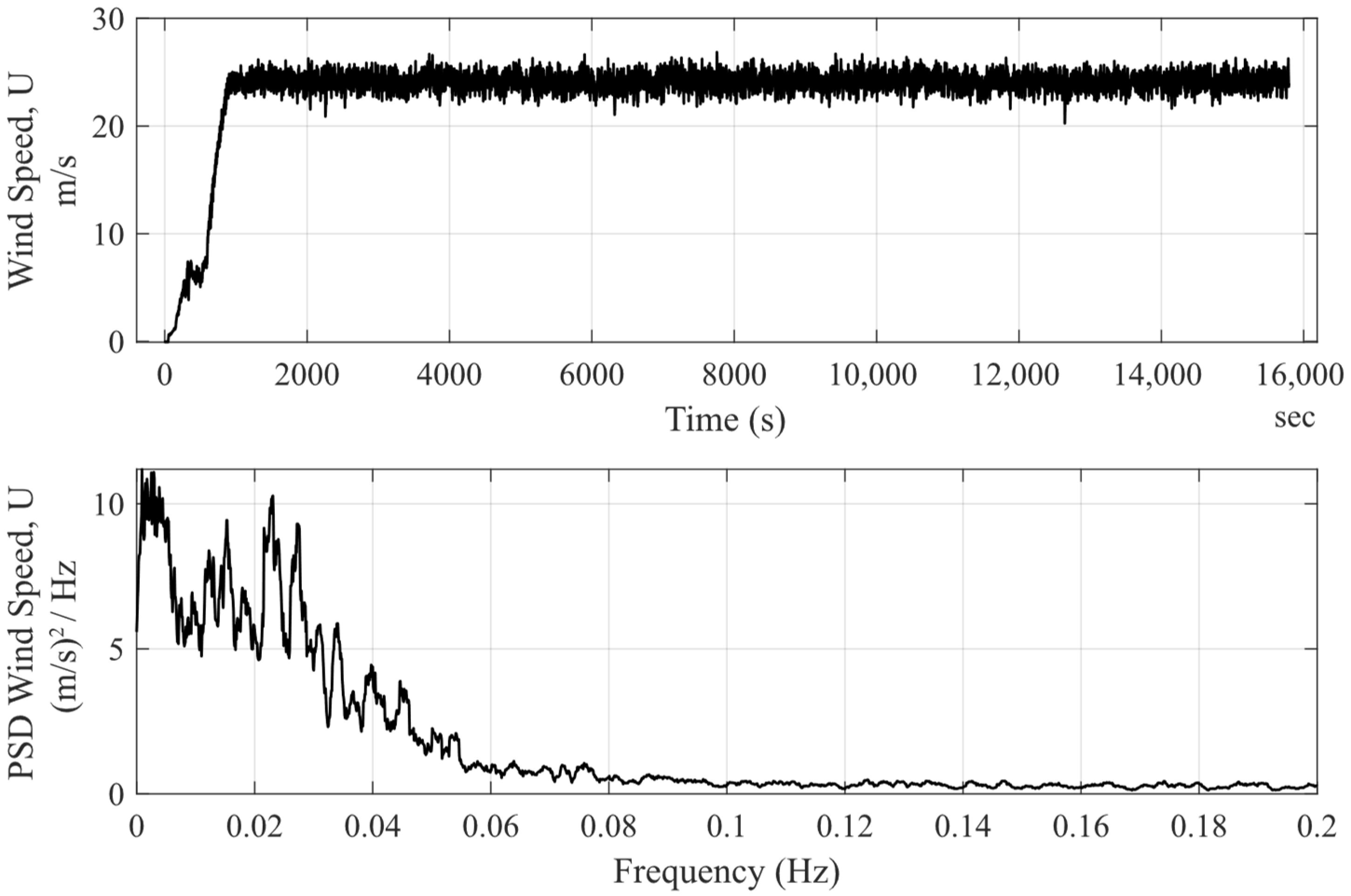
| Frequency Range [Hz] | Dominant Forcing or Response |
|---|---|
| 0.0005–0.0120 | Wind Turbulence |
| 0.0120–0.0500 | Platform Pitch Response |
| 0.0550–0.2500 | Wave Energy |
| Experiment, Average | OpenFAST | ||||||
|---|---|---|---|---|---|---|---|
| Channel | Unit | Mean | Range | SD | Mean | Range | SD |
| Pltfm Surge | m | 0.6 | 11.7 | 1.45 | 0.6 | 11.6 | 1.39 |
| Pltfm Pitch | deg | 0.0 | 3.6 | 0.46 | 0.0 | 3.3 | 0.46 |
| TowerBsMyt | N·m × 108 | −0.01 | 5.46 | 0.66 | −0.01 | 5.22 | 0.70 |
| Lead Fairlead | N × 106 | 0.07 | 1.48 | 0.18 | 0.07 | 1.54 | 0.18 |
| Experiment, Average | OpenFAST | ||||||
|---|---|---|---|---|---|---|---|
| Channel | Unit | Mean | Range | SD | Mean | Range | SD |
| Pltfm Surge | m | 8.8 | 4.9 | 0.76 | 7.0 | 4.9 | 0.82 |
| Pltfm Pitch | deg | 5.2 | 2.7 | 0.44 | 4.3 | 4.2 | 0.55 |
| Blade Pitch | deg | 17.1 | 1.9 | 0.31 | 17.0 | 3.2 | 0.43 |
| Rotor Speed | RPM | 7.46 | 1.1 | 0.13 | 7.56 | 1.5 | 0.20 |
| Rotor Torque | N·m × 106 | 18.67 | 5.93 | 0.68 | 18.67 | 0.00 | 0.00 |
| TowerBsMyt | N·m × 108 | 3.72 | 2.86 | 0.42 | 3.12 | 2.82 | 0.37 |
| Lead Fairlead | N × 106 | 0.78 | 0.61 | 0.10 | 0.78 | 0.61 | 0.10 |
| Experiment, Average | OpenFAST | ||||||
|---|---|---|---|---|---|---|---|
| Channel | Unit | Mean | Range | SD | Mean | Range | SD |
| Pltfm Surge | m | 9.7 | 12.0 | 1.61 | 7.5 | 9.2 | 1.33 |
| Pltfm Pitch | deg | 5.2 | 4.6 | 0.59 | 4.3 | 4.7 | 0.67 |
| Blade Pitch | deg | 17.1 | 2.0 | 0.32 | 17.0 | 3.1 | 0.44 |
| Rotor Speed | RPM | 7.46 | 1.3 | 0.15 | 7.56 | 1.7 | 0.21 |
| Rotor Torque | N·m × 106 | 18.67 | 6.05 | 0.72 | 18.67 | 0.00 | 0.00 |
| TowerBsMyt | N·m × 108 | 3.74 | 6.04 | 0.79 | 3.11 | 5.54 | 0.74 |
| Lead Fairlead | N × 106 | 1.07 | 1.51 | 0.20 | 0.84 | 1.24 | 0.17 |
| Experiment, % Difference | OpenFAST, % Difference | |||||
|---|---|---|---|---|---|---|
| Channel | Mean | Range | SD | Mean | Range | SD |
| Pltfm Surge | 3% | 1% | −2% | 0% | 1% | 0% |
| Pltfm Pitch | 0% | −12% | −4% | 0% | −13% | −15% |
| Blade Pitch | 0% | 22% | 13% | 0% | 6% | 0% |
| Rotor Speed | 0% | −1% | 2% | 0% | −6% | −6% |
| Rotor Torque | 0% | 7% | 4% | 0% | 0% | 0% |
| TowerBsMyt | 0% | −8% | −2% | 0% | −2% | −5% |
| Lead Fairlead | 3% | 1% | −2% | 0% | −1% | 0% |
| Experiment | OpenFAST | |||||
|---|---|---|---|---|---|---|
| Channel | Wind Freq * | Pitch Freq * | Wave Freq * | Wind Freq * | Pitch Freq * | Wave Freq * |
| Pltfm Surge | −5% | −1% | −2% | 3% | 0% | −1% |
| Pltfm Pitch | 20% | −32% | 7% | 12% | −59% | 9% |
| Blade Pitch | −1% | 6% | 182% | 2% | −35% | 183% |
| Rotor Speed | 18% | −26% | 26% | 16% | −25% | 17% |
| Rotor Torque | 28% | −23% | 25% | N/A | N/A | N/A |
| TowerBsMyt | 23% | −38% | −3% | 14% | −61% | −1% |
| Lead Fairlead | −6% | −2% | −2% | 3% | −1% | 0% |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2023 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Fowler, M.; Lenfest, E.; Viselli, A.; Goupee, A.; Kimball, R.; Bergua, R.; Wang, L.; Zalkind, D.; Wright, A.; Robertson, A. Wind/Wave Testing of a 1:70-Scale Performance-Matched Model of the IEA Wind 15 MW Reference Wind Turbine with Real-Time ROSCO Control and Floating Feedback. Machines 2023, 11, 865. https://doi.org/10.3390/machines11090865
Fowler M, Lenfest E, Viselli A, Goupee A, Kimball R, Bergua R, Wang L, Zalkind D, Wright A, Robertson A. Wind/Wave Testing of a 1:70-Scale Performance-Matched Model of the IEA Wind 15 MW Reference Wind Turbine with Real-Time ROSCO Control and Floating Feedback. Machines. 2023; 11(9):865. https://doi.org/10.3390/machines11090865
Chicago/Turabian StyleFowler, Matthew, Eben Lenfest, Anthony Viselli, Andrew Goupee, Richard Kimball, Roger Bergua, Lu Wang, Daniel Zalkind, Alan Wright, and Amy Robertson. 2023. "Wind/Wave Testing of a 1:70-Scale Performance-Matched Model of the IEA Wind 15 MW Reference Wind Turbine with Real-Time ROSCO Control and Floating Feedback" Machines 11, no. 9: 865. https://doi.org/10.3390/machines11090865
APA StyleFowler, M., Lenfest, E., Viselli, A., Goupee, A., Kimball, R., Bergua, R., Wang, L., Zalkind, D., Wright, A., & Robertson, A. (2023). Wind/Wave Testing of a 1:70-Scale Performance-Matched Model of the IEA Wind 15 MW Reference Wind Turbine with Real-Time ROSCO Control and Floating Feedback. Machines, 11(9), 865. https://doi.org/10.3390/machines11090865