

Working Condition Identification Method of Wind Turbine Drivetrain


Abstract
:1. Introduction
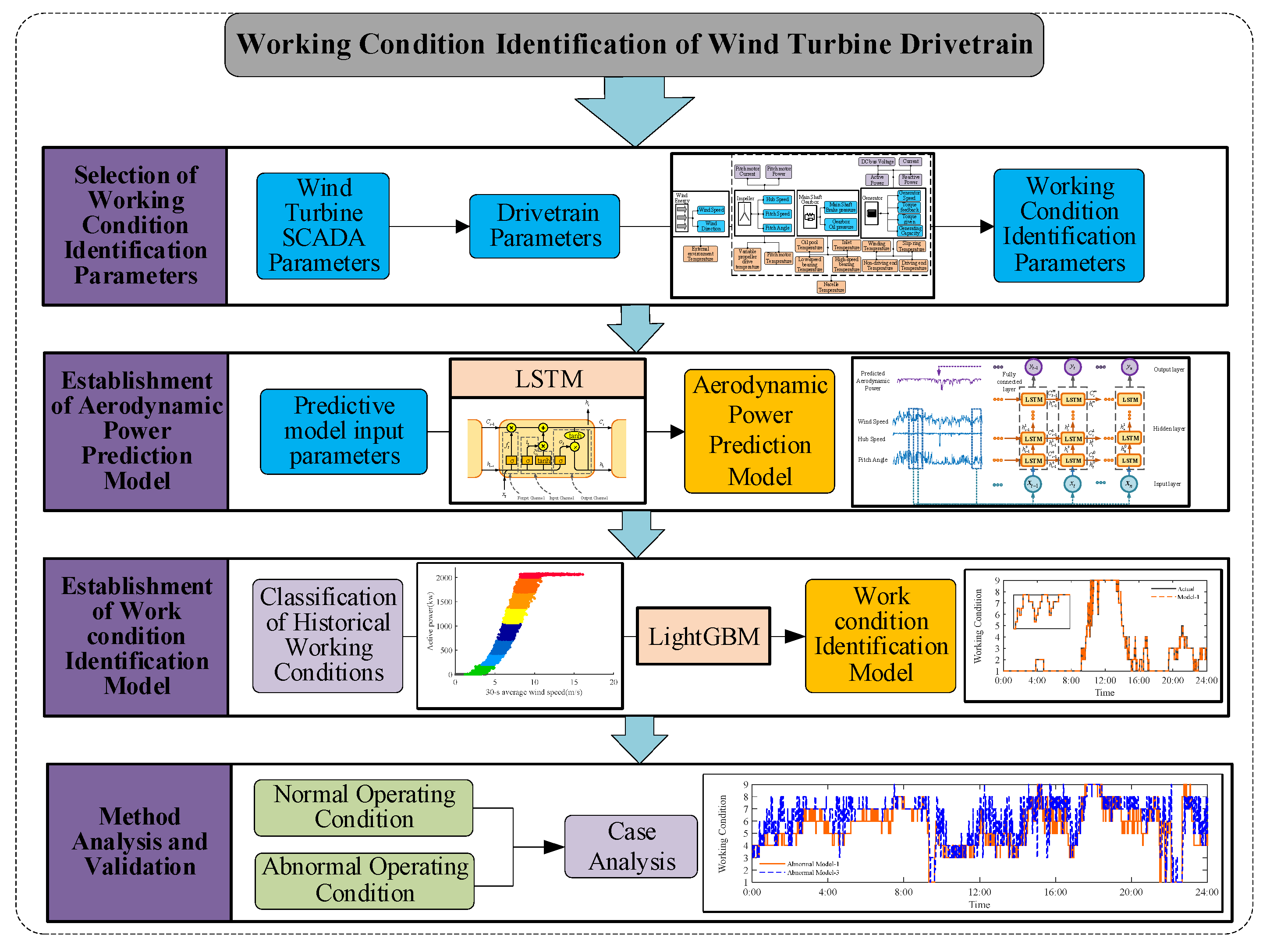
2. Selection of Working Condition Identification Parameters
3. Aerodynamic Power Prediction Model
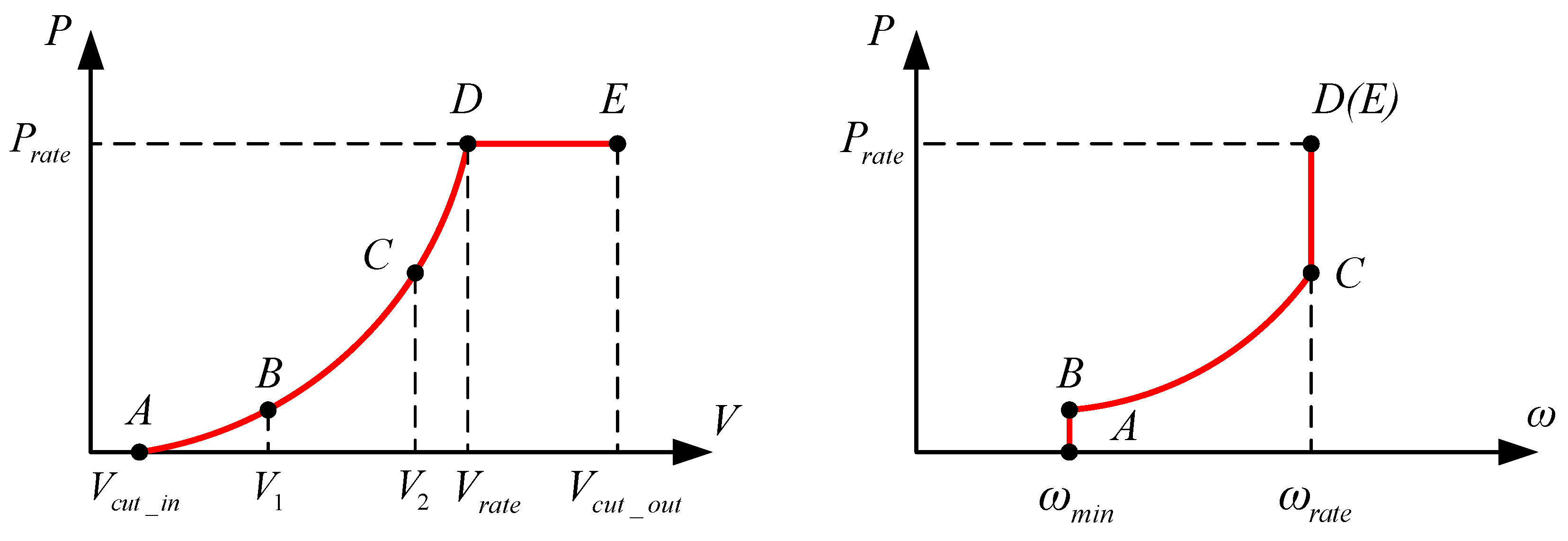
3.1. Theoretical Calculation of Aerodynamic Power
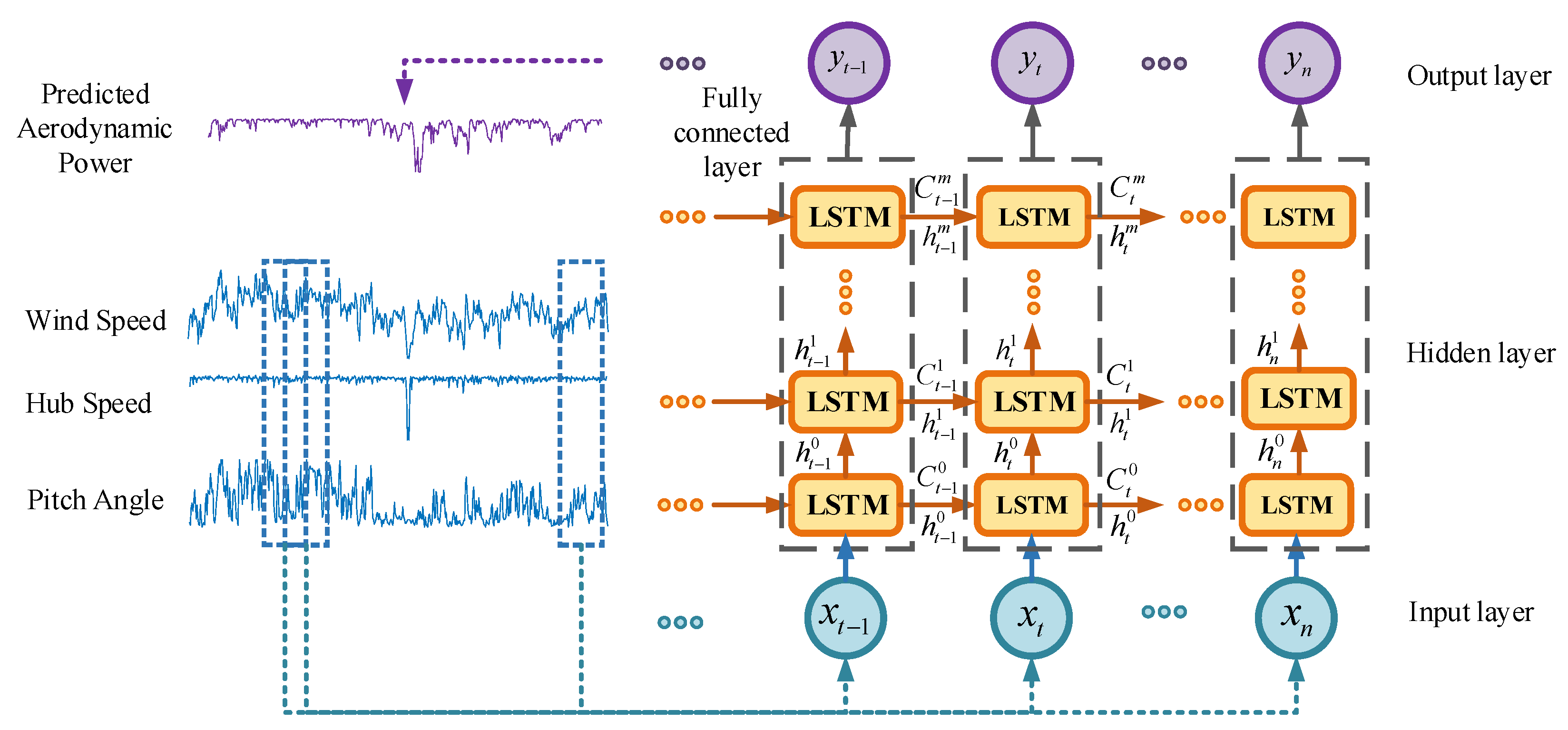
3.2. LSTM-Based Aerodynamic Power Prediction Model
3.3. The Prediction of Aerodynamic Power
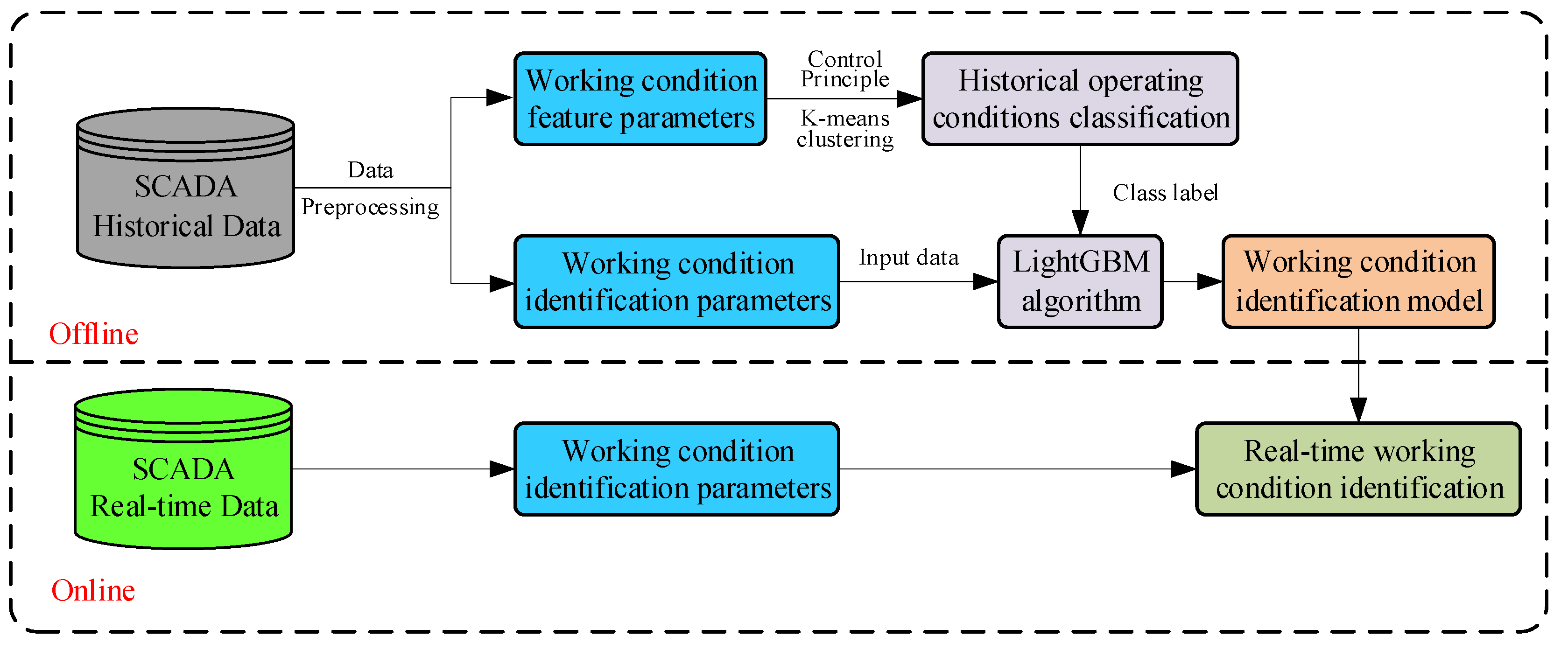
4. Work Condition Identification Model
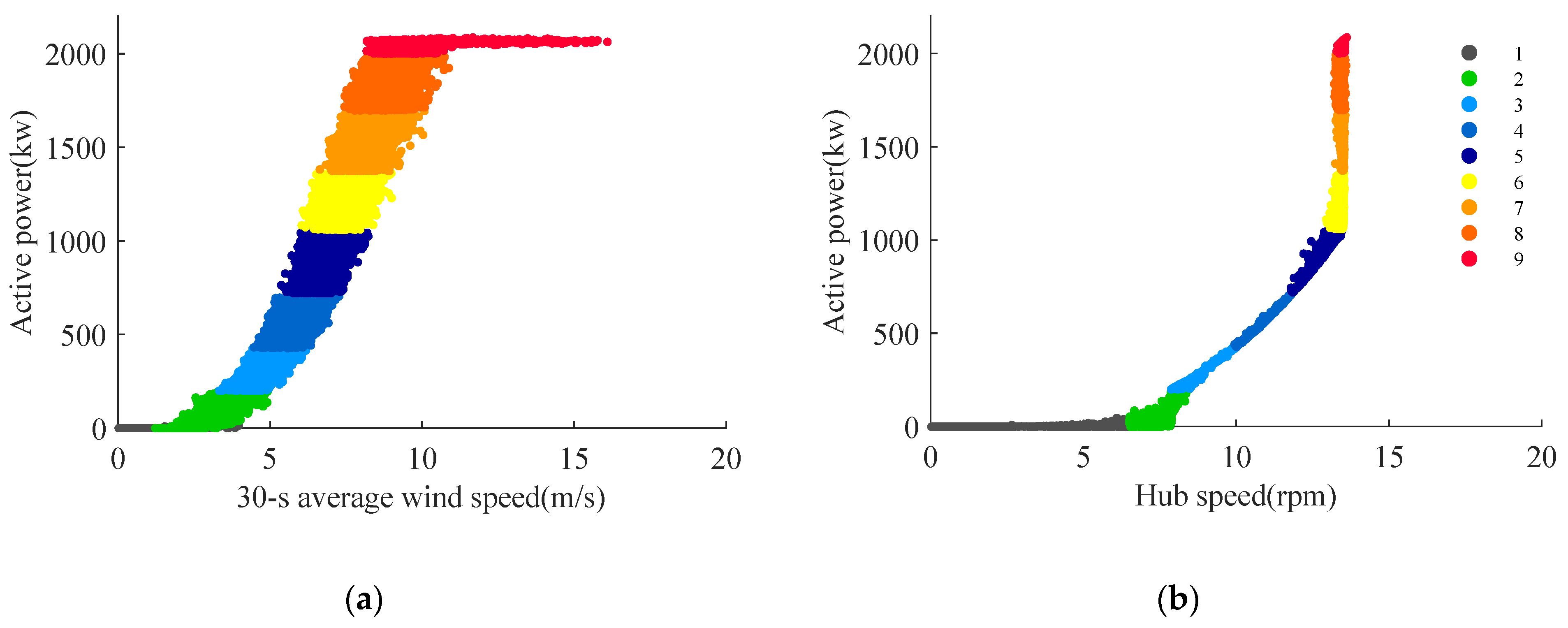
4.1. Classification of Historical Working Conditions
4.2. LightGBM-Based Working Condition Identification Model
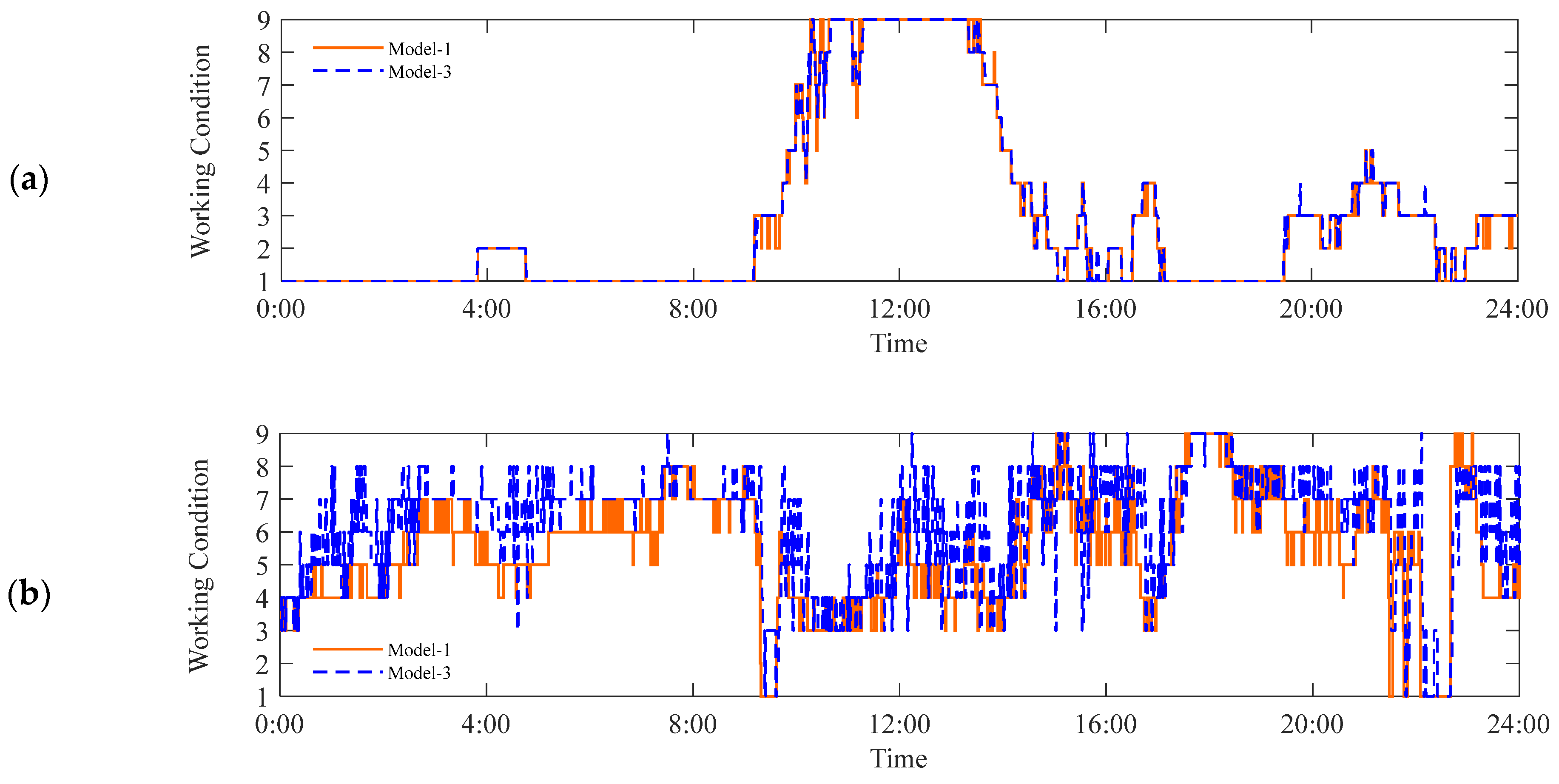
4.3. Working Condition Identification under Normal Operation State
4.4. Working Condition Identification under Abnormal Operation State
5. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Conflicts of Interest
References
- Chu, S.; Majumdar, A. Opportunities and Challenges for a Sustainable Energy Future. Nature 2012, 488, 294–303. [Google Scholar] [CrossRef] [PubMed]
- Astolfi, D. Perspectives on SCADA Data Analysis Methods for Multivariate Wind Turbine Power Curve Modeling. Machines 2021, 9, 100. [Google Scholar] [CrossRef]
- Tchakoua, P.; Wamkeue, R.; Ouhrouche, M.; Slaoui-Hasnaoui, F.; Tameghe, T.A.; Ekemb, G. Wind Turbine Condition Monitoring: State-of-the-Art Review, New Trends, and Future Challenges. Energies 2014, 7, 2595–2630. [Google Scholar] [CrossRef]
- Ribrant, J.; Bertling, L.M. Survey of Failures in Wind Power Systems With Focus on Swedish Wind Power Plants During 1997–2005. IEEE Trans. Energy Convers. 2007, 22, 167–173. [Google Scholar] [CrossRef]
- Shi, W.; Wang, F.; Zhuo, Y.; Liu, Y. Research on Operation Condition Classification Method for Vibration Monitoring of Wind Turbine. In Proceedings of the 2010 Asia-Pacific Power and Energy Engineering Conference, Chengdu, China, 28–31 March 2010; pp. 1–6. [Google Scholar]
- Gioia, N.; Peeters, C.; Guillaume, P.; Helsen, J. Identification of Noise, Vibration and Harshness Behavior of Wind Turbine Drivetrain under Different Operating Conditions. Energies 2019, 12, 3401. [Google Scholar] [CrossRef]
- Yang, T.; Zhao, L.; Xu, J.; Li, W.; Zhang, G. Abnormal Identification Method of Wind Power Turbine Based on Copula Function. Electr. Switch. 2021, 59, 26–31. [Google Scholar]
- Gu, Y.; Su, L.; Zhong, Y.; Xu, T. An Online Fault Early Warning Method for Wind Turbine Gearbox Based on Operational Condition Division. Electr. Power Sci. Eng. 2014, 30, 1–5+11. [Google Scholar]
- Hackell, M.W.; Rolfes, R.; Kane, M.B.; Lynch, J.P. Three-Tier Modular Structural Health Monitoring Framework Using Environmental and Operational Condition Clustering for Data Normalization: Validation on an Operational Wind Turbine System. Proc. IEEE 2016, 104, 1632–1646. [Google Scholar] [CrossRef]
- Cheng, H.; Zhang, Q. Multidimensional wind turbine operating condition identification based on operating data. In Proceedings of the 6th China Wind Power Aftermarket Exchange and Cooperation Conference, Beijing, China, 21–24 October 2019; pp. 42–47. [Google Scholar]
- Zhao, Y.; Pan, J.; Huang, Z.; Miao, Y.; Jiang, J.; Wang, Z. Analysis of Vibration Monitoring Data of an Onshore Wind Turbine under Different Operational Conditions. Eng. Struct. 2020, 205, 110071. [Google Scholar] [CrossRef]
- Liu, C.; Yan, X. Monitoring of the State of the Gear Box of a Wind Power Generator Unit Based on the Operating Condition Identification. J. Eng. Therm. Energy Power 2016, 31, 41–46+133. [Google Scholar] [CrossRef]
- Wang, H.; Wang, H.; Jiang, G.; Li, J.; Wang, Y. Early Fault Detection of Wind Turbines Based on Operational Condition Clustering and Optimized Deep Belief Network Modeling. Energies 2019, 12, 984. [Google Scholar] [CrossRef]
- Zheng, X.; Li, M.; Wang, J.; Ren, H.; Fu, Y. Operational conditions classification of offshore wind turbines based on kernel principal analysis optimized by PSO. Power Syst. Prot. Control 2016, 44, 28–35. [Google Scholar] [CrossRef]
- Chen, H.; Ma, H.; Chu, X.; Xue, D. Anomaly Detection and Critical Attributes Identification for Products with Multiple Operating Conditions Based on Isolation Forest. Adv. Eng. Inform. 2020, 46, 101139. [Google Scholar] [CrossRef]
- Rezamand, M.; Kordestani, M.; Orchard, M.E.; Carriveau, R.; Ting, D.S.-K.; Saif, M. Improved Remaining Useful Life Estimation of Wind Turbine Drivetrain Bearings Under Varying Operating Conditions. IEEE Trans. Ind. Inform. 2021, 17, 1742–1752. [Google Scholar] [CrossRef]
- Dong, Y.; Li, Y.; Cao, H.; He, C.; Gu, Y. Real-time Health Condition Evaluation on Wind Turbines Based on Operational Condition Recognition. Proc. CSEE 2013, 33, 88–95+15. [Google Scholar] [CrossRef]
- Zeng, H.; Dai, J.; Zuo, C.; Chen, H.; Li, M.; Zhang, F. Correlation Investigation of Wind Turbine Multiple Operating Parameters Based on SCADA Data. Energies 2022, 15, 5280. [Google Scholar] [CrossRef]
- Slootweg, J.G.; Polinder, H.; Kling, W.L. Representing Wind Turbine Electrical Generating Systems in Fundamental Frequency Simulations. IEEE Trans. Energy Convers. 2003, 18, 9. [Google Scholar] [CrossRef]
- Qin, D.; Tian, M.; Yang, J. Study on Dynamic Characteristics of Gear Transmission System of Wind Generator under Various Wind Load. Acta Energ. Sol. Sin. 2012, 33, 190–196. [Google Scholar]
- Li, Z.; Luo, X.; Liu, M.; Cao, X.; Du, S.; Sun, H. Short-Term Prediction of the Power of a New Wind Turbine Based on IAO-LSTM. Energy Rep. 2022, 8, 9025–9037. [Google Scholar] [CrossRef]
- Zhang, J.; Yan, J.; Infield, D.; Liu, Y.; Lien, F. Short-Term Forecasting and Uncertainty Analysis of Wind Turbine Power Based on Long Short-Term Memory Network and Gaussian Mixture Model. Appl. Energy 2019, 241, 229–244. [Google Scholar] [CrossRef]
- Li, J.; Song, Z.; Wang, X.; Wang, Y.; Jia, Y. A Novel Offshore Wind Farm Typhoon Wind Speed Prediction Model Based on PSO–Bi-LSTM Improved by VMD. Energy 2022, 251, 123848. [Google Scholar] [CrossRef]
- Zhu, Y.; Zhu, C.; Tan, J.; Wang, Y.; Tao, J. Operational State Assessment of Wind Turbine Gearbox Based on Long Short-Term Memory Networks and Fuzzy Synthesis. Renew. Energy 2022, 181, 1167–1176. [Google Scholar] [CrossRef]
- Lei, J.; Liu, C.; Jiang, D. Fault Diagnosis of Wind Turbine Based on Long Short-Term Memory Networks. Renew. Energy 2019, 133, 422–432. [Google Scholar] [CrossRef]
- Chen, H.; Liu, H.; Chu, X.; Liu, Q.; Xue, D. Anomaly Detection and Critical SCADA Parameters Identification for Wind Turbines Based on LSTM-AE Neural Network. Renew. Energy 2021, 172, 829–840. [Google Scholar] [CrossRef]
- Zhang, C.; Hu, D.; Yang, T. Anomaly Detection and Diagnosis for Wind Turbines Using Long Short-Term Memory-Based Stacked Denoising Autoencoders and XGBoost. Reliab. Eng. Syst. Saf. 2022, 222, 108445. [Google Scholar] [CrossRef]
- Graves, A. Long Short-Term Memory. In Supervised Sequence Labelling with Recurrent Neural Networks; Springer: Berlin/Heidelberg, Germany, 2012; pp. 37–45. [Google Scholar] [CrossRef]
- Li, C.; Ye, Z.; Gao, W.; Jiang, Z. Modern Large-Scale Wind Turbine Design Principle, 1st ed.; Shanghai Scientific & Technical Publishers: Shanghai, China, 2013. [Google Scholar]
- Morrison, R.; Liu, X.; Lin, Z. Anomaly Detection in Wind Turbine SCADA Data for Power Curve Cleaning. Renew. Energy 2022, 184, 473–486. [Google Scholar] [CrossRef]
- Chen, H.; Xie, C.; Dai, J.; Cen, E.; Li, J. SCADA Data-Based Working Condition Classification for Condition Assessment of Wind Turbine Main Transmission System. Energies 2021, 14, 7043. [Google Scholar] [CrossRef]
- Ke, G.; Meng, Q.; Finley, T.; Wang, T.; Chen, W.; Ma, W.; Ye, Q.; Liu, T. A highly efficient gradient boosting decision tree. In Proceedings of the Advances in Neural Information Processing Systems, Long Beach, CA, USA, 4–9 December 2017; pp. 3146–3154. [Google Scholar]













{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Parameter | Value |
|---|---|
| Hidden layer | 3 |
| Time step | 20 |
| Iteration cycle | 105 |
| Learning rate | 0.005 |
| Batch size | 64 |
| Loss function | MSE |
| Optimizer | Adam |
| Method | MRE | |
|---|---|---|
| Theoretical calculation | 204.1608843 | 0.7236284 |
| Model prediction | 42.1555041 | 0.9852787 |
| Model | ||
|---|---|---|
| Model-1 | 0.9973284 | 0.9960851 |
| Model-2 | 0.9242778 | 0.8446969 |
| Model-3 | 0.9900651 | 0.9835994 |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2023 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Huang, Y.; Chen, H.; Dai, J.; Tao, H.; Wang, X. Working Condition Identification Method of Wind Turbine Drivetrain. Machines 2023, 11, 495. https://doi.org/10.3390/machines11040495
Huang Y, Chen H, Dai J, Tao H, Wang X. Working Condition Identification Method of Wind Turbine Drivetrain. Machines. 2023; 11(4):495. https://doi.org/10.3390/machines11040495
Chicago/Turabian StyleHuang, Yuhao, Huanguo Chen, Juchuan Dai, Hanyu Tao, and Xutao Wang. 2023. "Working Condition Identification Method of Wind Turbine Drivetrain" Machines 11, no. 4: 495. https://doi.org/10.3390/machines11040495
APA StyleHuang, Y., Chen, H., Dai, J., Tao, H., & Wang, X. (2023). Working Condition Identification Method of Wind Turbine Drivetrain. Machines, 11(4), 495. https://doi.org/10.3390/machines11040495