1. Introduction
Underwater wireless charging is an innovative approach designed to provide a continuous energy supply to underwater devices. With the increase in the number of underwater operations and exploration activities, including deep-sea research, underwater pipeline maintenance, and seabed resource exploration, there is a growing demand for an efficient and reliable underwater energy supply [
1,
2,
3]. Wet-mate charging, which requires precise coordination with autonomous underwater vehicles (AUVs) and uses wet connectors that are unreliable, expensive, and have a limited lifespan, is the conventional method [
4]. In contrast, underwater wireless charging offers a solution that eliminates the need for physical connections [
5,
6], significantly enhancing the safety, flexibility, and efficiency of underwater operations.
Wireless charging technology can be divided into three categories based on its working principle: magnetic field coupling, electric field coupling, and electromagnetic radiation.
Inductive power transfer (IPT) technology, whose principle is similar to that of traditional transformers, generates an alternating magnetic field through the action of alternating current on the primary coil. The alternating magnetic field passes through the secondary coil, inducing electromotive force and achieving wireless transmission of electrical energy [
7].
The principle of capacitive power transfer (CPT) is similar to that of capacitors. Metal electrode plates are placed on the primary and secondary sides, and an alternating electric field is generated by applying an AC voltage to the primary electrode plate. The secondary metal electrode couples with the primary side through this alternating electric field to achieve wireless transmission of electrical energy [
8].
Electromagnetic radiation (ER) wireless charging technology uses electromagnetic waves to transmit electrical energy, converting electrical energy into antenna microwaves. It uses array antennas or other forms of antennas to dissipate and release microwave energy and then converts microwaves back into electrical energy achieving wireless transmission of electrical energy [
9].
Compared with IPT, CPT usually considers the use of large-area electrode plates or higher operating frequencies to achieve high-power transmission. However, the greater the operating frequency in seawater, the greater is the eddy current loss. The ER also needs to work in high-frequency mode. The conductivity of the seawater medium will absorb most of the high-frequency electromagnetic wave energy, resulting in low transmission efficiency; therefore, IPT technology is simpler and more practical underwater. Regarding IPT technology, Refs. [
10,
11,
12,
13,
14,
15,
16,
17,
18,
19] have mainly conducted further research on coupling devices, compensation networks, power control methods, and other aspects.
However, in the complex environment of underwater wireless charging applications, there may be lateral or longitudinal displacement of the coils between the transmitter and receiver, which reduces the output power and efficiency [
10]. Many scholars have conducted extensive research on this issue. The docking system developed by the Woods Hole Institute of Oceanography (WHOI) in Massachusetts, USA, for the Odyssey class underwater robot [
11] uses deep-sea mooring equipment supported by surface buoys, as shown in
Figure 1a. It provides a protective garage around the underwater robot and does not require additional hardware modifications. This concept is implemented in the REMUS docking stations [
12] and the EURODOCKER [
13], as shown in
Figure 1b. Refs. [
11,
12] proposed a complete docking method for underwater charging, but the solutions in [
11,
12] require complex equipment and have high costs.
In 2017, researchers at Zhejiang University in China modified an annular magnetic coupling device placed on an AUV using hollow coils wound around the exterior of the AUV to reduce the weight of the magnetic core of the AUV [
3]. However, this configuration makes the internal equipment of the AUV susceptible to electromagnetic interference from the magnetic field, necessitating the installation of aluminum plates within the coils for magnetic shielding. In 2018, researchers at the University of Michigan adopted a segmented design for the annular magnetic coupling device, dividing the secondary side into three identical receiving devices, with the primary side having three identical I-shaped magnetic cores. Three-phase electricity is used for the excitation current in the transmitter, with the excitation current amplitudes and frequencies of the three devices being the same, but shifted by 120° [
2]. Based on the bipolar magnetic coupling device, a team from Harbin Institute of Technology proposed an orthogonal coil bipolar magnetic coupling device [
14]. In 2019, Hiroyasu Kifune and others from Tokyo University of Marine Science and Technology proposed an optimized coil layout for underwater WPT systems, achieving over 74% transfer efficiency without the need for coil position adjustment [
15]. Lee and others studied the effects of high pressure and axial misalignment on the operation of electromagnetic couplers in deep-sea environments by building a 400 W prototype inductive coupler with a pot core [
16]. Wang and others designed a loosely coupled wireless system for a 50 kg manned AUV, transmitting 500 W of power with 88% efficiency over a gap distance varying from 6 to 10 mm [
17].
However, the various schemes mentioned above are limited to single coil transfer. Single coil wireless power transfer cannot enhance the magnetic field in a certain direction in a directional manner. Therefore, when the secondary coil is offset, a large amount of magnetic leakage is inevitable in single coil wireless power transfer. These magnetic leaks interfere with the operation of AUVs and generate a large amount of eddy current loss in seawater. However, multicoil wireless power transfer can enhance the magnetic field in a certain direction, so it is necessary to conduct research on multicoil wireless energy transfer in the field of underwater wireless power transfer.
This paper introduces a multiple transfer coil WPT (MTCWPT) system with three advantages: resistance to efficiency loss and output reduction due to misalignment, concentration of the magnetic field on the receiving coil to reduce magnetic leakage and eddy current losses, and robustness through nonsingular sliding mode control. The system achieves a transfer power of 40 W within an 80 mm offset range at an input voltage of 25 V, maintaining an efficiency of over 78.5%.
2. Materials and Methods
2.1. Coil Design
2.1.1. The Impact of Seawater on Wireless Power Transfer
The permeabilities of air and seawater are almost the same, but there is a significant difference in conductivity between air and seawater. The alternating electromagnetic field generated by the high-frequency alternating current in the coil will ultimately result in eddy current losses. Eddy current loss is an important issue in power systems because it can lead to energy waste and equipment heating, thereby affecting the stability and safety of the power system.
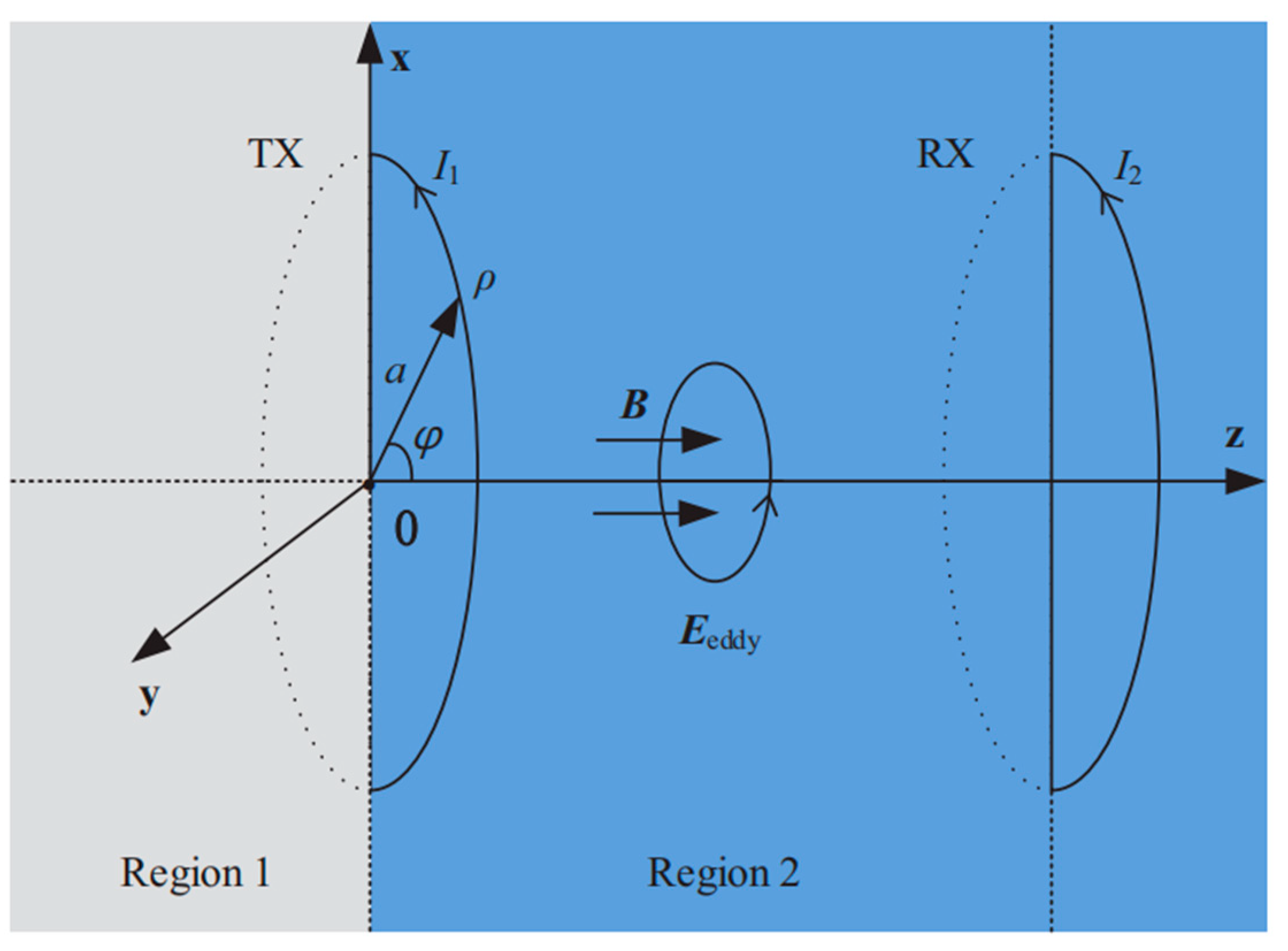
Figure 2 shows a simplified electric field model for underwater radio energy transfer.
According to
Figure 2, the expression for eddy current loss during underwater wireless energy transfer can be listed as follows:
In Equation (1), Peddy is the eddy current loss power, K is a constant, f is the frequency of the electromagnetic field, B is the magnetic induction intensity, δ is the resistivity of seawater, and V is the volume of seawater.
Equation (1) shows that the eddy current loss of underwater wireless energy transfer is mainly affected by the magnetic induction intensity B and the frequency f of the alternating magnetic field. Therefore, the frequency of underwater wireless energy transfer should not be too high. However, a low transfer frequency can also reduce the transfer capacity of wireless energy transfer. After comprehensive consideration, in this article 100 kHz was selected as the frequency for underwater wireless energy transfer.
2.1.2. Single Coil Comparison
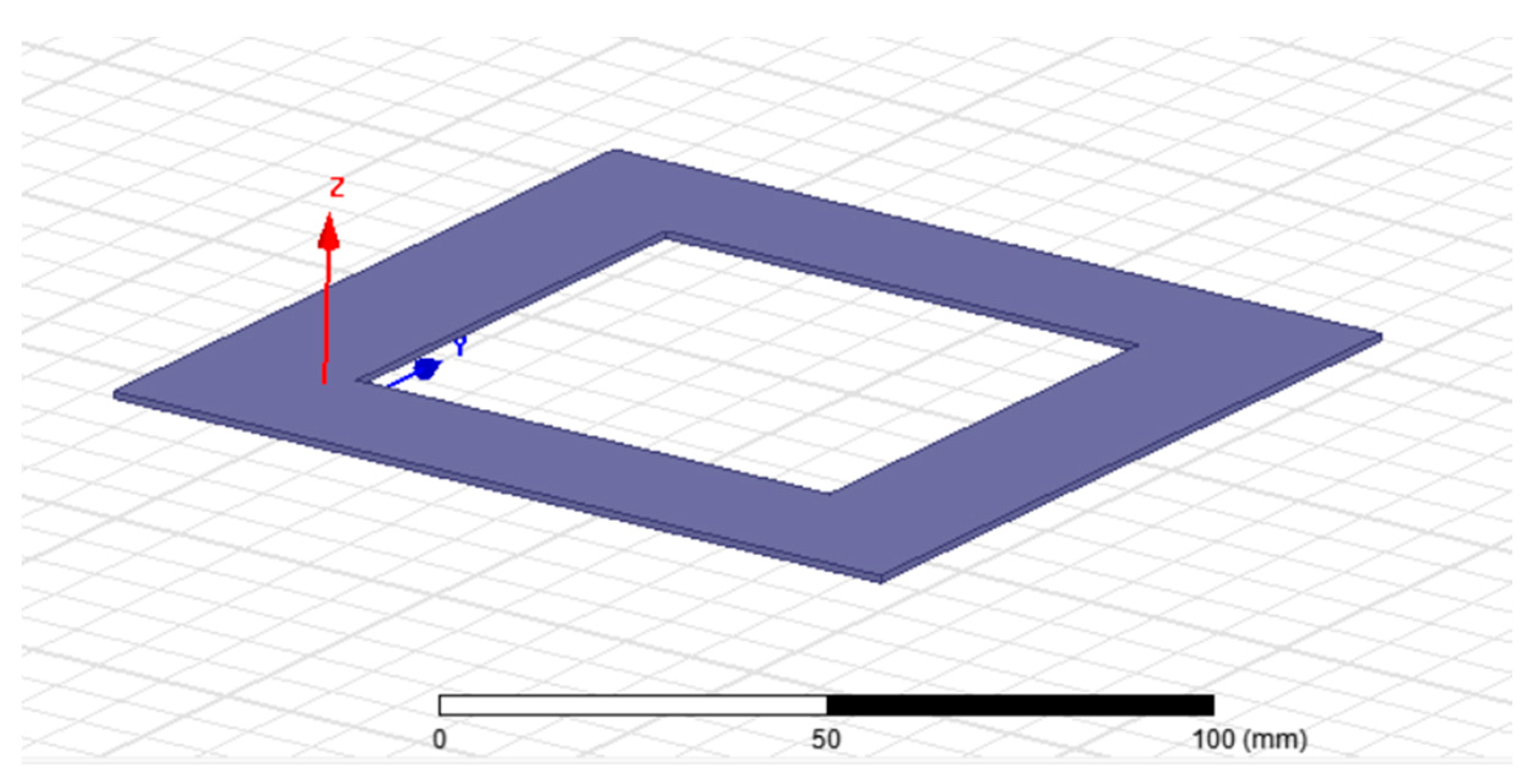
The coupling coils used in wireless charging mainly include planar spiral coils and spatial spiral coils. The shape of the spatial spiral coil is cylindrical, and it is installed on the equipment in a vertical structure, occupying a large space. The shape of the planar spiral coil is flat, and it is installed on the equipment in a flat structure, occupying little space. In this article the wireless charging coil structure applied to AUVs was mainly studied. Due to the limited space inside AUVs and underwater AUV charging devices, a planar spiral coil was chosen as the research object. The commonly used planar spiral coils have two structures: circular and rectangular, as shown in
Figure 3.
To compare the advantages and disadvantages of circular and rectangular planar coils, 3D simulation models of planar circular coils and rectangular coils were established in the finite element simulation software Maxwell. The simulation model is shown in
Figure 4. The parameters of the simulation model in
Figure 4 have been provided in
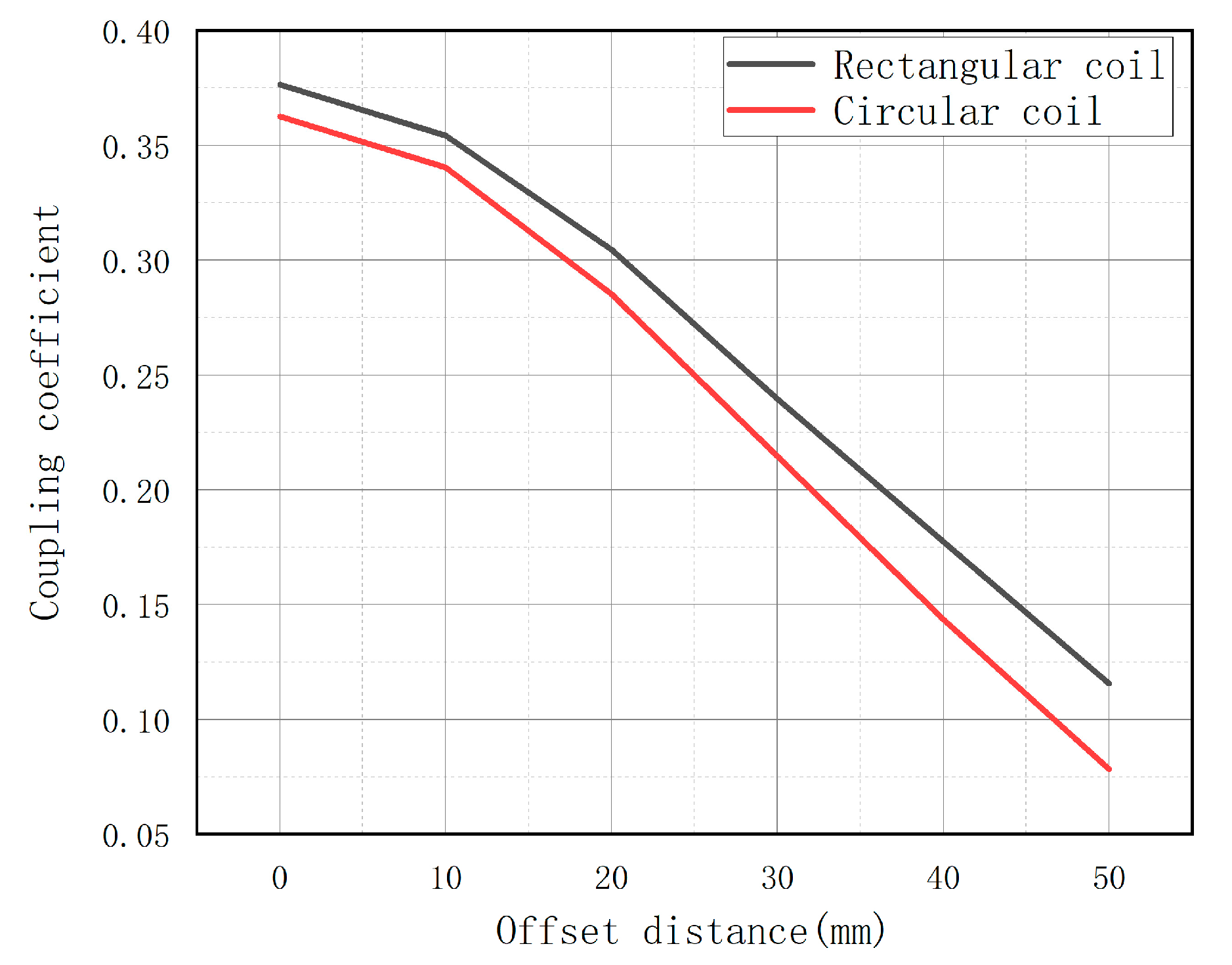
Table 1. To avoid errors when comparing the two coils, the sizes of the two coils are set to be consistent when establishing the coil model, and the wire diameter, number of turns, and turn spacing of the two coils are also kept the same. Simulations were conducted under different offset conditions, and the coupling coefficient varied with the offset, as shown in
Figure 5.
Through simulation data, it was found that under the same size, the decrease in the coupling coefficient between circular coils with an offset is significantly greater than that between rectangular coils with an offset. The larger the coupling coefficient, the smaller is the magnetic leakage. Underwater wireless energy transfer should consider coil losses, and due to the influence of seawater media, high-frequency alternating magnetic fields will generate much larger eddy currents in seawater than in air, which will result in significant eddy current losses. The smaller the magnetic leakage, the smaller is the eddy current loss generated during wireless energy transfer. At the same size, the eddy current loss generated by transmitting electrical energy between circular coils is significantly greater than that generated by transmitting electrical energy between rectangular coils. Therefore, this article mainly focuses on the study of rectangular coils.
2.1.3. Design of Multi Coil Coupler
When there is a large offset between the primary and secondary sides, the coupling coefficient inevitably decreases, leading to an increase in magnetic leakage and eddy current losses. Currently, there are two main methods to solve this problem: increasing the primary coil and using multi coil transfer. However, increasing the primary coil will inevitably generate more leakage magnetic flux, which will also increase eddy current losses. Therefore, in this study, it was decided to use multiple coils for transfer.
In the wireless charging system designed in this paper, transmitting coils 1, 2, 3, and 4 are all square coils with dimensions of 120 mm × 120 mm, as illustrated in
Figure 6.
One critical issue in multicoil wireless charging is that coupling between transmitting coils generates a substantial amount of reactive power. This leads to an increase in the primary-side current, which, in turn, increases coil losses. To decouple the transmitting coils as much as possible, portions of the coils need to overlap. For the ease of subsequent calculation and design, the overlapping portion is fixed at 40 mm. Additionally, to reduce magnetic leakage, ferrite is introduced, as illustrated in
Figure 7. The system receiving coil is shown in
Figure 8 and the parameters of the transmitting and receiving coils are given in
Table 2.
Definitions:
is the coupling coefficient between coil 1 and coil 2,
is the coupling coefficient between coil 1 and coil 3,
is the coupling coefficient between coil 1 and coil 4,
is the coupling coefficient between coil 2 and coil 3,
is the coupling coefficient between coil 2 and coil 4, and
is the coupling coefficient between coil 3 and coil 4. Given that the four coils are symmetrically distributed, the coupling coefficients
and
. Thus, during the design phase, only decoupling designs for parameters
and
need to be focused on.
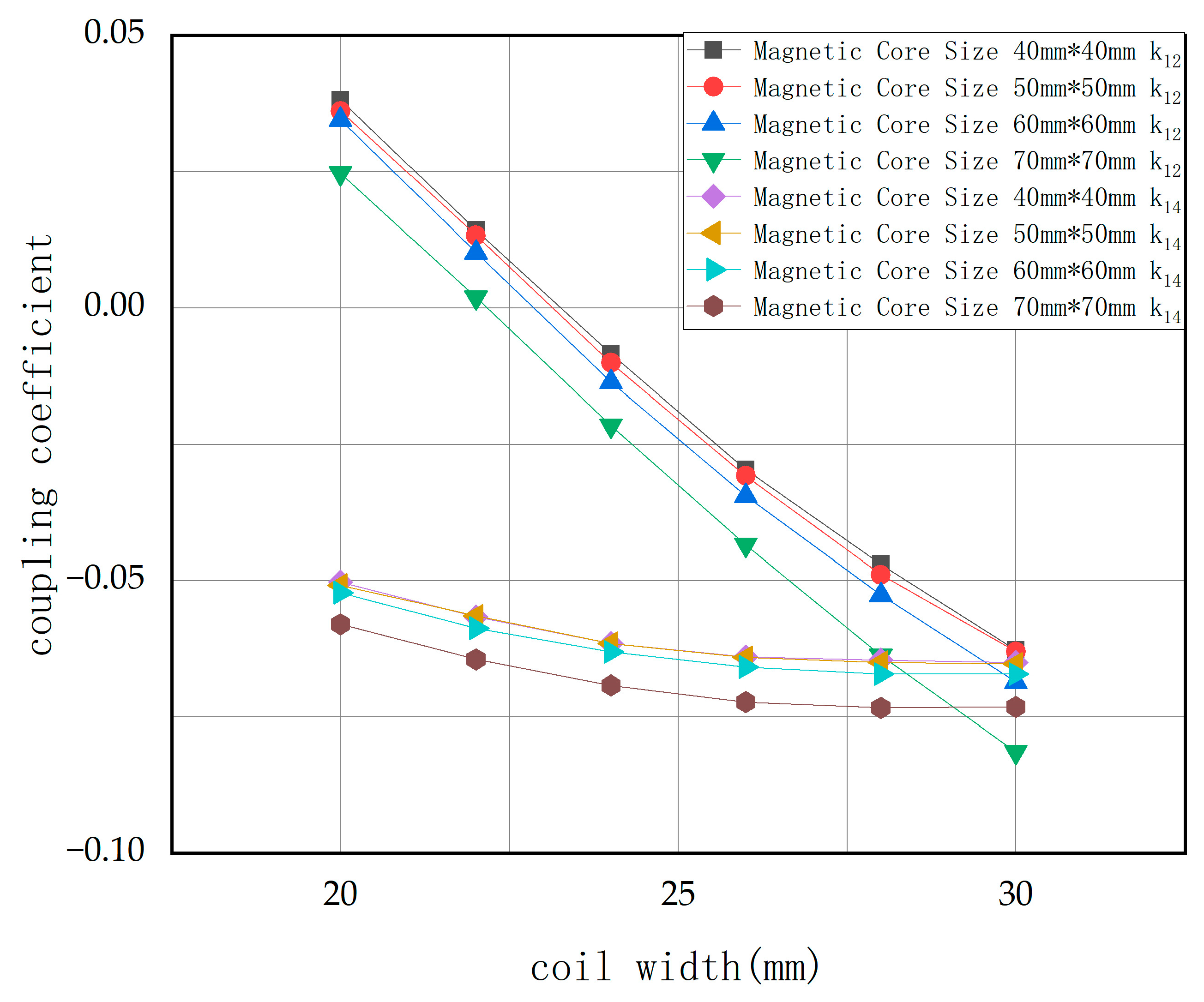
Figure 9 shows the trends of changes in coupling coefficients
and
as the dimensions of the magnetic core and the width of the coils vary.
Figure 9 indicates that the width of the coils has a minimal impact on the coupling coefficient between diagonal coils, while it significantly affects the coupling between adjacent coils. The dimensions of the magnetic core influence both diagonal and adjacent coil coupling; the coupling between diagonal coils decreases with decreasing core size. However, when the core size is reduced to below 50 mm × 50 mm, its effect on the coupling between transmitting coils becomes negligible. Since adjacent coils can be decoupled by adjusting their width, when designing magnetic coupling devices, priority is given to reducing the magnetic core size to decrease the coupling coefficients between diagonal coils. After comprehensive consideration, the designed magnetic coupling device had a coil width of 23 mm and core dimensions of 50 mm × 50 mm.
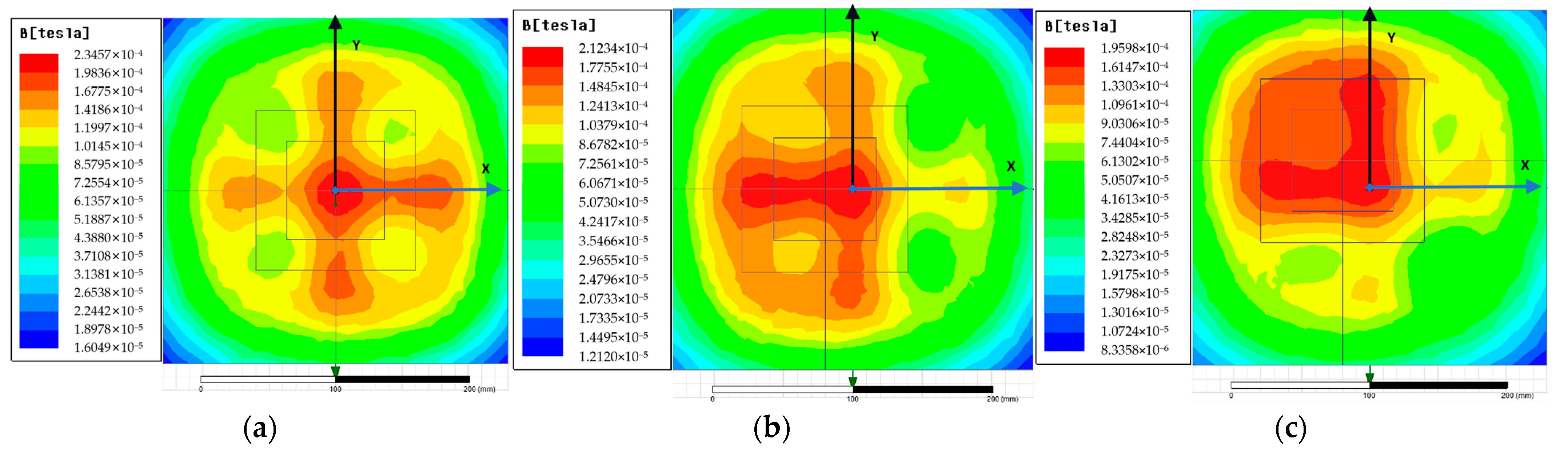
In
Figure 10,
M1,
M2,
M3, and
M4 represent the mutual inductance between coils 1, 2, 3, and 4 and the receiving coil. The vertical distance between the transmitting coil and the receiving coil is 20 mm. The magnetic coupling device designed in this article can ensure a large mutual inductance between the transmitting coil and the receiving coil under any offset condition of the secondary side within an offset range of 80 mm in the
x and
y direction, thus ensuring the anti-offset capability of the system.
2.2. Circuit Design
Figure 11 presents a schematic diagram of the MTCWPT system. The charging structure transfers electrical energy from the four transmitting coils
L1,
L2,
L3, and
L4 to the receiving coil. The enclosure of the WPT device is waterproof. Each transmitting coil is powered by an H-bridge inverter circuit, and the direction of the magnetic field is regulated by the depicted control circuit.
Coils 1, 2, 3, and 4 are each coupled with a secondary coil, creating four energy channels, designated energy channels 1, 2, 3, and 4, respectively.
In this study, all the energy channels employ the LCC/S compensation topology, and the overall circuit diagram is illustrated in
Figure 12. In
Figure 12,
M1,
M2,
M3 and
M4 represent the mutual inductances between coils 1, 2, 3, and 4 and the secondary coil.
The transmitter is tuned through an LCC compensation network, while the receiver is tuned through an S compensation network. The circuit parameters are typically designed according to the following equations:
In Equations (2)–(5), ω0 is the resonant frequency of the circuit; L1, L2, L3, and L4 are the inductances of coil 1, coil 2, coil 3, and coil 4, respectively; Lf1, Lf2, Lf3, and Lf4 are the compensation inductances of the primary compensation circuit; C1, C2, C3, C4, C5, C6, C7, and C8 are the compensation capacitances of the primary compensation circuit; LR is the inductance of receiving coil R; C9 is the compensation capacitance of the secondary circuit; P1, P2, P3, and P4 are the input powers of the compensation circuit for coil 1, coil 2, coil 3, and coil 4, respectively; M1, M2, M3, and M4 are the mutual inductances between coil 1 and the secondary coil, coil 2 and the secondary coil, coil 3 and the secondary coil, and coil 4 and the secondary coil, respectively; RLeq is the equivalent resistance of the load and rectifier circuit.
2.3. SV-Based Excitation Method
As shown in
Figure 13, we divided the transmitting coil into two groups of BP coils: BP coil BP1 composed of coil 1 and coil 2, and BP coil BP 2 composed of coil 3 and coil 4.
As shown in
Figure 14, when secondary coil
R is displaced in the y-direction relative to the transmitting coil through spatial vector decomposition, BP1 and BP2 can be considered the stator of a two-phase motor, with the Rreceiver acting as the rotor. The electrical equivalent circuit of the WPT system in
Figure 14 shows the receiver misalignment angle derived, based on the receiver longitudinal position relative to the transmitter. In this representation, the receiver misalignment angle is analogous to the rotor position [
19].
The reference point for calculating the misalignment angle is the center of the BP1 coil in the y-direction (coinciding with the center of the BP2 coil). This angle is derived from the following equation:
The variable
Ry represents the distance from the center of the secondary coil in the y-direction to the center of the transmitting BP1 coil, while
b denotes the length of transmission device in the y-direction.
Figure 15 depicts the vector diagram of the WPT system.
After converting
Figure 14 into a vector graph,
Figure 15 can be obtained. The phase shift between BP1 and BP2 is 2π/3 radians. The current vector received by secondary coil R can be obtained through vector addition:
Different values of
IBP1 and
IBP2 will generate different current vectors
I. As shown in
Figure 15, the αβ coordinate system is a standing coordinate system. For ease of calculation, we specify the direction of a as the direction of the BP1 current vector. The transmitter current
I can be mapped to
Iα and
Iβ in the αβ plane for further analysis through matrix
T:
The dq coordinate system is a rotating coordinate system that is stationary relative to the secondary coil. After components
Iα and
Iβ are transformed to αβ, the rotation matrix
R can be used to orient the system to the receiver reference coordinate system and dq coordinate system, thereby deriving the d-axis component
Id and q-axis component
Iq of the transmitter current:
By using the inverse
T and
R transformations, the transmitter current can be represented by its d-axis and q-axis components:
The d-axis current generates a magnetic flux aligned with the receiver, while the q-axis current generates a magnetic flux perpendicular to the receiver. Ideally, a multicoil transmitter should only generate a d-axis current, with the q-axis current being 0, to reduce the magnitude of the transmitter current vector. By setting
Iq = 0 and combining Equation (12), the ideal excitation currents
IBP1 and
IBP2 can be written as functions of θ:
For displacement of secondary coil R in the x-direction relative to the transmitting coil, transmitting coils L1 and L2 can be considered the stator of a two-phase motor, and transmitting coils L3 and L4 can be considered the stator of another two-phase motor, with the receiver acting as the rotor. The current vector required for the secondary coil is generated through vector calculations.
The reference point for calculating the misalignment angle is the center of the BP1 coil in the x-direction. This angle is derived from the following equation:
The variable Rx represents the distance from the center of the secondary coil in the x-direction to the center of the transmitting coil 1, while a denotes the length of transmission device in the x-direction.
2.3.1. BP1 Coil Current Vector Calculation
From the analysis of the equation in the previous section, the current vector that secondary coil
R is expected to receive from the BP1 coil is as follows:
BP coil BP1 is controlled similarly to previous analysis. According to
Figure 16, the ideal excitation currents
I1 and
I2 can be written as functions of
φ:
2.3.2. BP2 Coil Current Vector Calculation
Similarly, from the analysis in the previous section, the current vector that secondary coil
R is expected to receive from the BP2 coil is as follows:
According to
Figure 12, the voltage of the secondary coil
UR is as follows:
The output voltage of the rectifier bridge
UO is as follows:
The output current of the rectifier bridge
IO is as follows:
Substituting Equations (15)–(19) into Equation (20) yields the
Id required for a fixed output voltage
Uout, which is derived as follows:
Substituting Equations (15)–(20) into Equation (21) yields the
Id required for a fixed output current
Iout as follows:
2.4. Mutual Inductance Measurement and Positioning
2.4.1. Mutual Inductance Measurement
Based on the circuit diagram in
Figure 12, a simplified equivalent circuit diagram can be drawn, as shown in
Figure 17.
In this design, an LCC-S compensation network is employed. Based on the properties of the LCC-S compensation network, the following can be determined:
Combining Equation (24) with the circuit diagram allows us to derive the expressions for active powers
P1,
P2,
P3, and
P4 for energy channels 1, 2, 3, and 4:
To facilitate the calculation during mutual inductance measurement, by design, let
Lf1 =
Lf2 =
Lf3 =
Lf4 =
Lf. Due to the extremely small internal resistance of the coil relative to the load resistance, it can be neglected during the calculation process; through the two equations above, we can solve for the following:
2.4.2. Position Prediction Based on BP Neural Network
Regarding the issue of the positioning of the primary and secondary coils, many studies are currently being conducted. This paper utilizes four transmitting coils positioned differently coil1, coil2, coil3, and coil4 to replace the four auxiliary coils for coil positioning [
20].
As shown in
Figure 18, based on the Neumann equation, the expression for mutual inductance between coil A and coil B is as follows:
After converting Equation (27) to the Cartesian coordinate system, we obtain the following:
where (
x1,
y1,
z1) are the coordinates of the center of coil A and (
x2,
y2,
z2) are the coordinates of the center of coil B.
When the relative offset between the positions of the transmitting and receiving coils changes, the mutual inductance between the coils also changes. The coordinates of the receiving coil (x, y, z) can be considered as three variables to be solved, and identification of the mutual inductances for different transmitting coils can enable detection of the relative offset between the coils. However, Equation (27) is clearly a complex nonlinear function.
Artificial neural networks achieve structured combinations of relatively simple mathematical expressions to produce more flexible and descriptive expressions describing the input-output relationships in specific processes. To overcome the limitations of traditional problem analysis due to complex quantification, backpropagation (BP) neural networks have been widely used for data prediction, pattern recognition, fault classification, etc. Therefore, a BP neural network was used for the designed wireless charging system to predict the secondary-side position.
The basic unit of the BP neural network is neurons. The general model of neurons is shown in
Figure 19, where the commonly used activation function is the sigmoid function. Its characteristic is that the function itself and its derivatives are continuous, making it very convenient to handle:
The output of a single neuron is as follows:
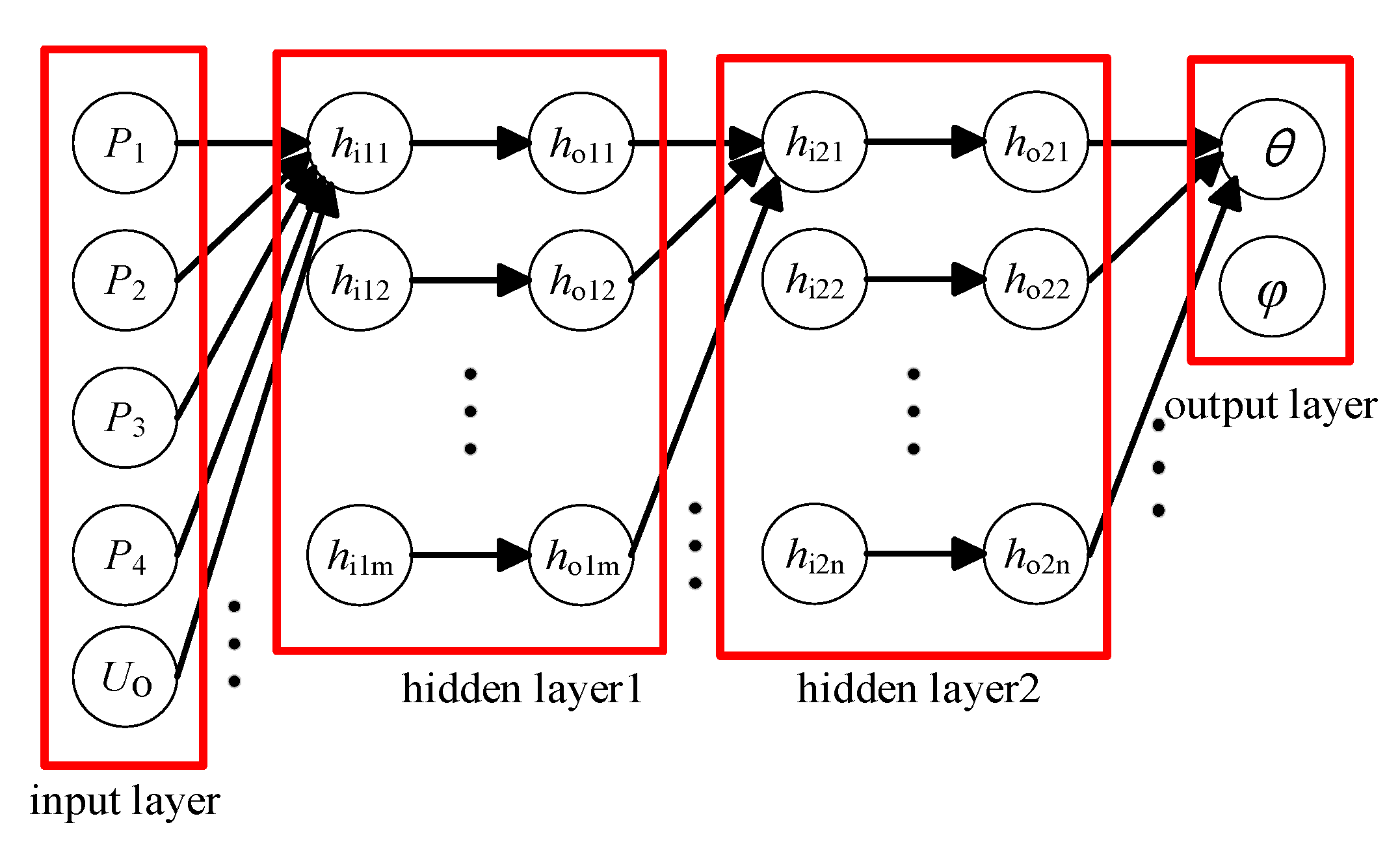
A neural network is a network formed by connecting multiple neurons together according to certain rules, as shown in
Figure 20. A neural network consists of an input layer, a hidden layer (middle layer), and an output layer. The number of neurons in the input layer is the same as the dimension of the input data, the number of neurons in the output layer is the same as the number of data to be fitted, and the number of neurons in the hidden layer needs to be set by the designer according to certain rules and objectives. Before the emergence of deep learning, the number of hidden layers was usually one, which means that the commonly used neural network was a three-layer network. Equation (28) is a nonlinear function. To reduce the computational complexity of the controller, this paper adopted a BP neural network with two hidden layers.
The specific learning process of the BP neural network is shown in
Figure 21.
Equation (25) shows that the mutual inductances between the four transmitting coils and the receiving coil can be obtained from the input voltage, input power, and output voltage. And the position of the receiving coil relative to the transmitting coil can be obtained from the mutual inductances between the four transmitting coils and the receiving coil. The input voltage and input power can be directly obtained from the primary signal acquisition circuit, and the output voltage can be acquired by the secondary signal acquisition circuit and transmitted to the primary side via wireless communication. The use of a BP neural network to train the input voltage, input power, output voltage, and corresponding secondary coil position can enable the prediction of the secondary coil position.
2.5. Nonsingular Terminal Sliding Mode Control
In traditional control technologies, challenges such as significant vibrations and slow response times exist. To further enhance the system robustness, this paper combines phase-shift control with nonsingular terminal sliding mode control (NTSMC) and neural networks [
21].
First, according to
Figure 12, we establish the equivalent topological circuit equations for the LCC-S system:
The expected output voltage of the system is set as
. Letting the control variables
,
, and
, the state-space equations for the LCC-S system can be described as follows:
The proposed sliding mode approach law is designed as below:
To eliminate vibrations as much as possible, SMC needs to satisfy the following conditions: Condition 1: rapid convergence to the sliding surface; Condition 2: a finite time to reach the sliding surface; and Condition 3: the velocity is zero when reaching the switching surface, i.e., the following:
Setting the initial value of
s(t) as
s(0), integrating Equation (33), and setting
s = 0, we can solve for the following:
when t =
τ, Condition 2 and Condition 3 are satisfied. Since 0 < α < 1, Condition 1 is also satisfied.
The system sliding surface is chosen as follows:
where
β, p, and q are the equivalent control coefficients. The selection of these coefficients must meet the existence conditions of SMC, which are derived using Lyapunov’s second method as follows:
By substituting (32) and (35) into (37), we find that the necessary and sufficient condition for the existence of a sliding mode on the switching surface is that the equivalent control satisfies the following equation:
By introducing the approach law (32), we obtain the following:
As long as is satisfied, the approach law meets the conditions for the existence and global reaching of the sliding mode.
The actual control law of the sliding mode controller is as follows:
After combining nonsingular SMC with the BP neural network, the control rate equation for the four energy channels is as below:
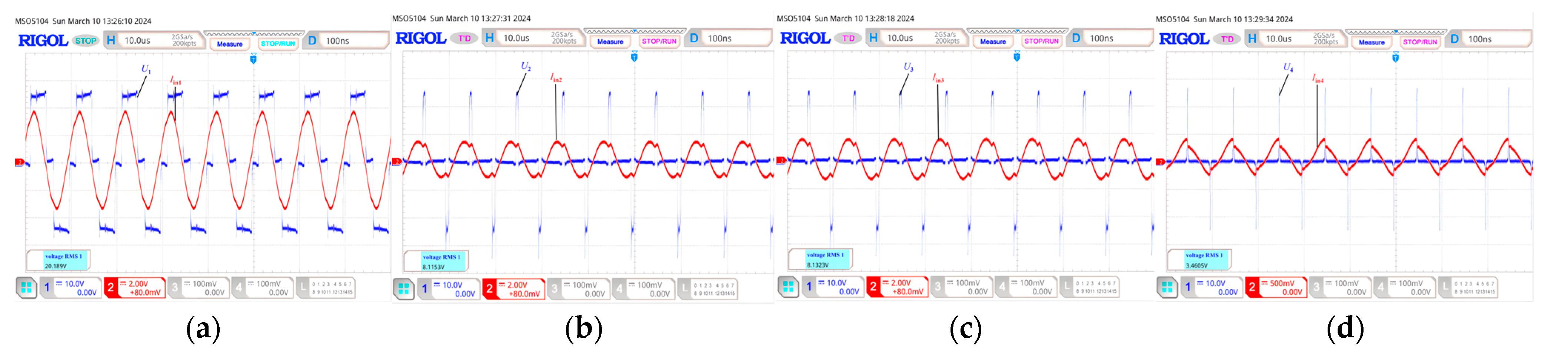
The input voltages of the four energy channels are as follows:








































{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}