
Capability of Machine Learning Algorithms to Classify Safe and Unsafe Postures during Weight Lifting Tasks Using Inertial Sensors

 , ,
, ,  and
and 
Abstract
:1. Introduction
2. Materials and Methods
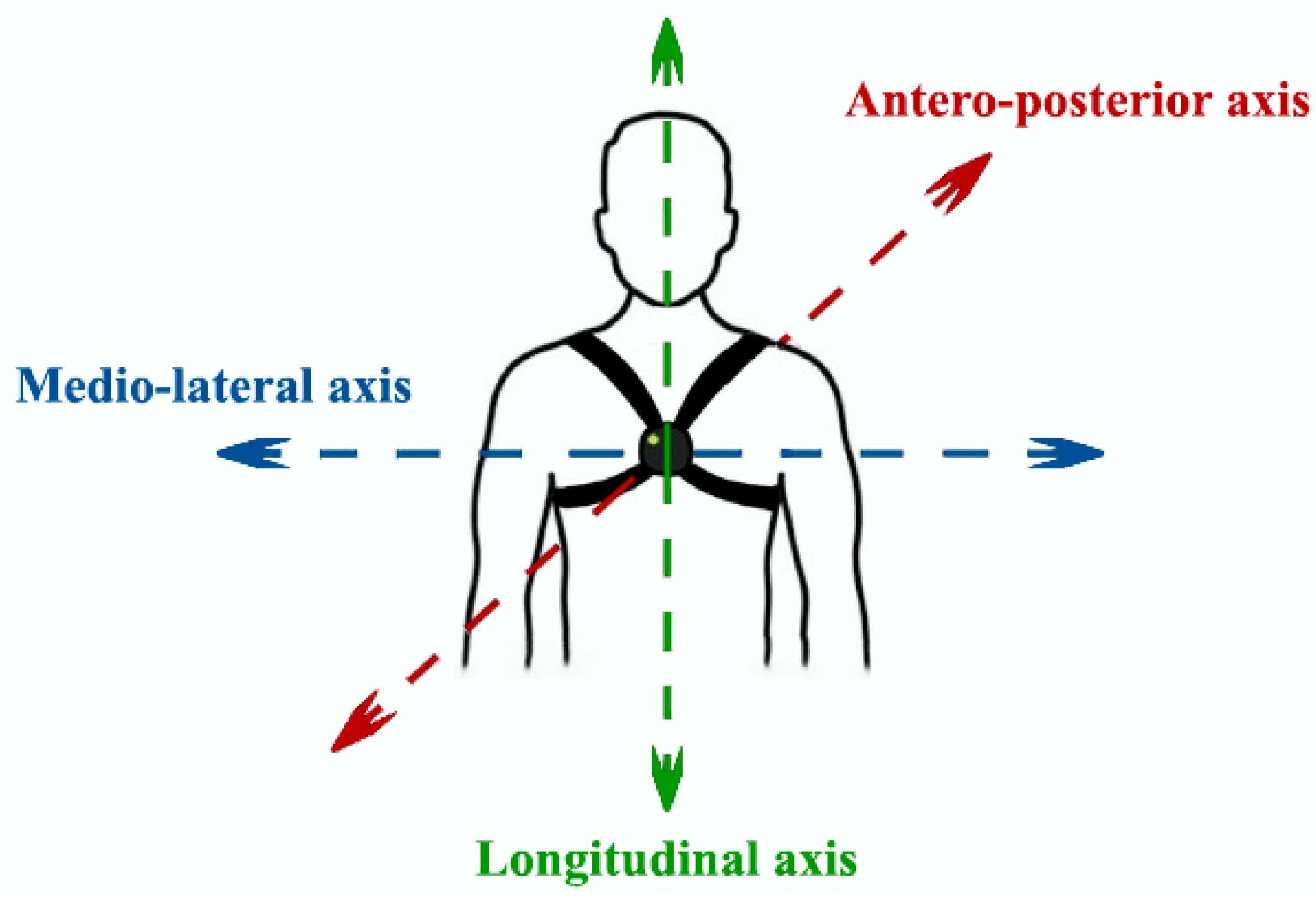
2.1. The Mobility Lab System (APDM)
2.2. Study Population
2.3. Experimental Study Protocol
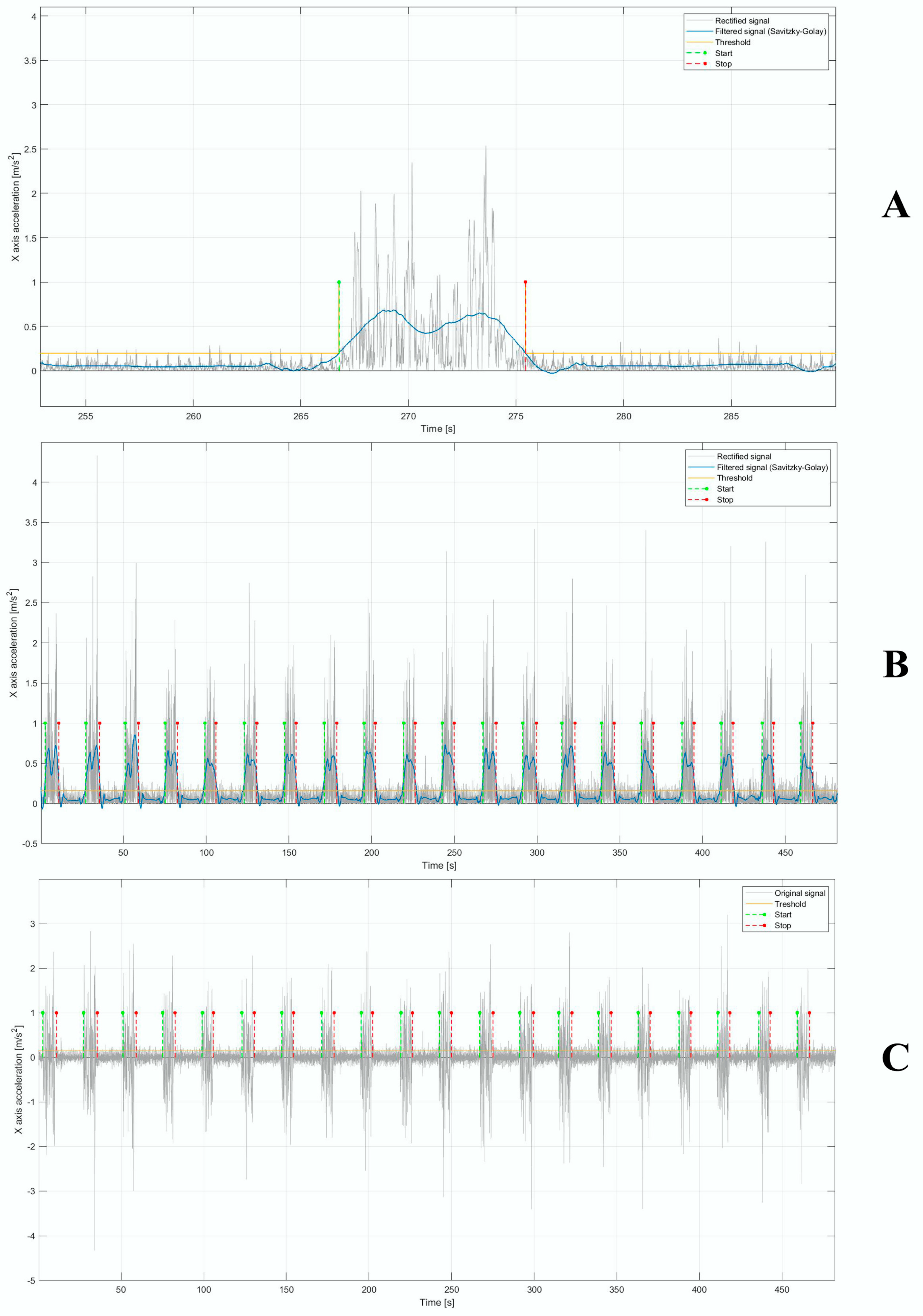
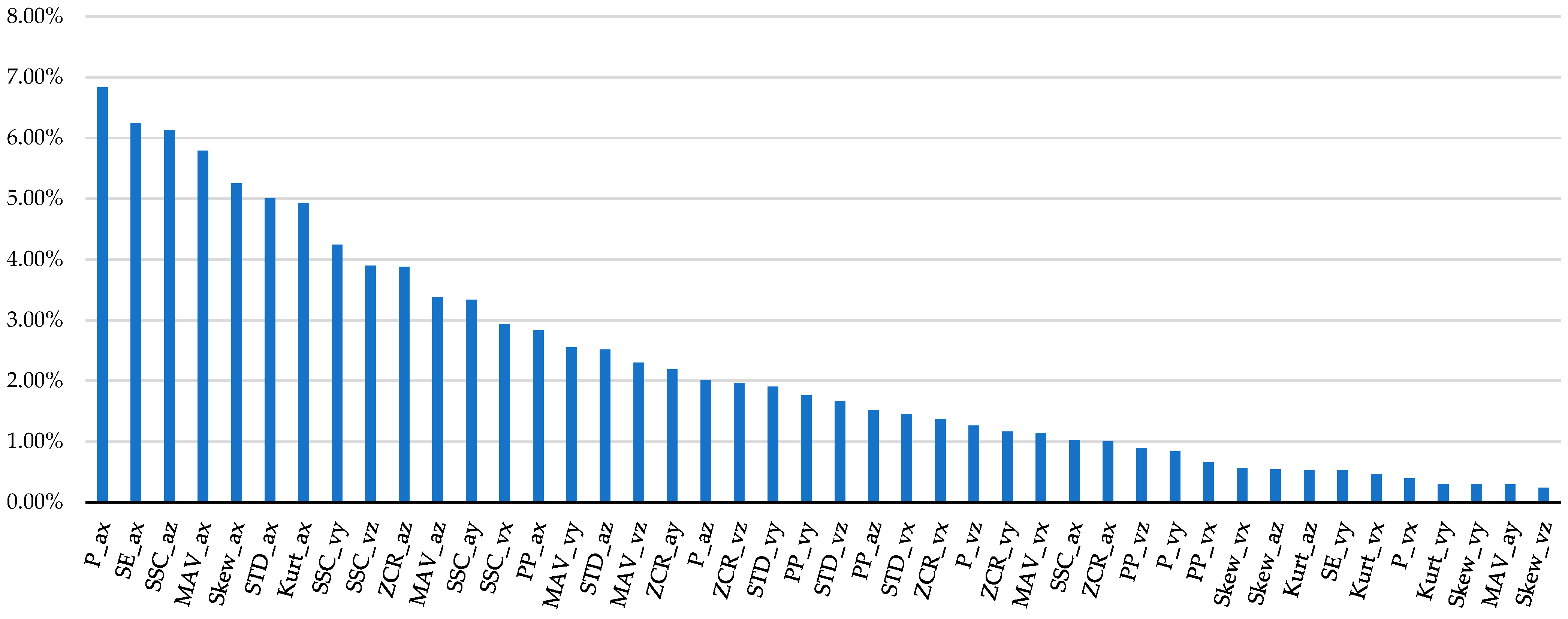
2.4. Digital Signal Processing and Feature Extraction
- Standard deviation (STD) (m/s2 for acceleration, deg/s for angular velocity):
- Mean absolute value (MAV) (m/s2 for acceleration, deg/s for angular velocity):
- Peak to peak amplitude (PP) (m/s2 for acceleration, deg/s for angular velocity):
- Zero crossing rate (ZCR) (adim):
- Slope sign changes (SSC) (adim):
- Total power (P) (m/s2 for acceleration, deg/s for angular velocity):
- Spectral entropy (SE) (adim):
- Kurtosis (Kurt) (adim):
- Skewness (Skew) [adim]:
- : i-th sample of the signal;
- : number of samples of the signal;
- : i-th sample of the Fourier transformation of the signal;
- : i-th sample of the TPS of the signal;
- : mean of the TPS of the signal;
- : STD of the TPS of the signal.
2.5. Statistical Analysis
2.6. Machine Learning Analysis
3. Results
4. Discussion
5. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Acknowledgments
Conflicts of Interest
References
- Grieco, A.; Molteni, G.; Vito, G.D.; Sias, N. Epidemiology of musculoskeletal disorders due to biomechanical overload. Ergonomics 1998, 41, 1253–1260. [Google Scholar] [CrossRef]
- Radwin, R.G.; Marras, W.S.; Lavender, S.A. Biomechanical aspects of work-related musculoskeletal disorders. Theor. Issues Ergon. Sci. 2001, 2, 153–217. [Google Scholar] [CrossRef]
- Marras, W.S.; Lavender, S.A.; Leurgans, S.E.; Fathallah, F.A.; Ferguson, S.A.; Gary Allread, W.; Rajulu, S.L. Biomechanical risk factors for occupationally related low back disorders. Ergonomics 1995, 38, 377–410. [Google Scholar] [CrossRef]
- Hales, T.R.; Bernard, B.P. Epidemiology of work-related musculoskeletal disorders. Orthop. Clin. N. Am. 1996, 27, 679–709. [Google Scholar] [CrossRef]
- Trask, C.; Mathiassen, S.E.; Wahlström, J.; Heiden, M.; Rezagholi, M. Modeling costs of exposure assessment methods in industrial environments. Work 2012, 41 (Suppl. S1), 6079–6086. [Google Scholar] [CrossRef]
- Waters, T.R.; Putz-Anderson, V.; Garg, A. Applications manual for the revised NIOSH lifting equation. Ergonomics 1993, 36, 749–776. [Google Scholar] [CrossRef]
- Karhu, O.; Härkönen, R.; Sorvali, P.; Vepsäläinen, P. Observing working postures in industry: Examples of OWAS application. Appl. Ergon. 1981, 12, 13–17. [Google Scholar] [CrossRef] [PubMed]
- Battevi, N.; Menoni, O.; Ricci, M.G.; Cairoli, S. MAPO index for risk assessment of patient manual handling in hospital wards: A validation study. Ergonomics 2006, 49, 671–687. [Google Scholar] [CrossRef] [PubMed]
- Hignett, S.; McAtamney, L. Rapid entire body assessment (REBA). Appl. Ergon. 2000, 31, 201–205. [Google Scholar] [CrossRef] [PubMed]
- Lynn, M.; Corlett, N. RULA: A survey method for the investigation of work-related upper limb disorders. Appl. Ergon. 1993, 24, 91–99. [Google Scholar]
- Donisi, L.; Cesarelli, G.; Pisani, N.; Ponsiglione, A.M.; Ricciardi, C.; Capodaglio, E. Wearable Sensors and Artificial Intelligence for Physical Ergonomics: A Systematic Review of Literature. Diagnostics 2022, 12, 3048. [Google Scholar] [CrossRef] [PubMed]
- D’Addio, G.; Donisi, L.; Mercogliano, L.; Cesarelli, G.; Bifulco, P.; Cesarelli, M. Potential biomechanical overload on skeletal muscle structures in students during walk with backpack. In Proceedings of the XV Mediterranean Conference on Medical and Biological Engineering and Computing—MEDICON 2019, Coimbra, Portugal, 26–28 September 2019. [Google Scholar]
- Donisi, L.; Cesarelli, G.; Coccia, A.; Panigazzi, M.; Capodaglio, E.M.; D’Addio, G. Work-related risk assessment according to the revised NIOSH lifting equation: A preliminary study using a wearable inertial sensor and machine learning. Sensors 2021, 21, 2593. [Google Scholar] [CrossRef] [PubMed]
- Ranavolo, A.; Draicchio, F.; Varrecchia, T.; Silvetti, A.; Iavicoli, S. Wearable monitoring devices for biomechanical risk assessment at work: Current status and future challenges—A systematic review. Int. J. Environ. Res. Public Health 2018, 15, 2001. [Google Scholar] [CrossRef]
- Greco, A.; Muoio, M.; Lamberti, M.; Gerbino, S.; Caputo, F.; Miraglia, N. Integrated wearable devices for evaluating the biomechanical overload in manufacturing. In Proceedings of the 2019 II Workshop on Metrology for Industry 4.0 and IoT (MetroInd4. 0&IoT), Naples, Italy, 4–6 June 2019. [Google Scholar]
- Stefana, E.; Marciano, F.; Rossi, D.; Cocca, P.; Tomasoni, G. Wearable devices for ergonomics: A systematic literature review. Sensors 2021, 21, 777. [Google Scholar] [CrossRef]
- Peppoloni, L.; Filippeschi, A.; Ruffaldi, E.; Avizzano, C.A. A novel wearable system for the online assessment of risk for biomechanical load in repetitive efforts. Int. J. Ind. Ergon. 2016, 52, 1–11. [Google Scholar] [CrossRef]
- Nath, N.D.; Chaspari, T.; Behzadan, A.H. Automated Ergonomic Risk Monitoring Using Body-Mounted Sensors and Machine Learning. Adv. Eng. Inform. 2018, 38, 514–526. [Google Scholar] [CrossRef]
- Yu, Y.; Li, H.; Yang, X.; Umer, W. Estimating Construction Workers’ Physical Workload by Fusing Computer Vision and Smart Insole Technologies. In Proceedings of the 35th International Symposium on Automation and Robotics in Construction (ISARC 2018), Berlin, Germany, 20–25 July 2018. [Google Scholar]
- Ranavolo, A.; Varrecchia, T.; Iavicoli, S.; Marchesi, A.; Rinaldi, M.; Serrao, M.; Conforti, L.; Cesarelli, M.; Draicchio, F. Surface electromyography for risk assessment in work activities designed using the “revised NIOSH lifting equation”. Int. J. Ind. Ergon. 2018, 68, 34–45. [Google Scholar] [CrossRef]
- Raso, R.; Emrich, A.; Burghardt, T.; Schlenker, M.; Gudehus, T.; Sträter, O.; Fettke, P.; Loos, P. Activity Monitoring Using Wearable Sensors in Manual Production Processes—An Application of CPS for Automated Ergonomic Assessments. In Proceedings of the Multikonferenz Wirtschaftsinformatik 2018 (MKWI 2018), Lüneburg, Germany, 6–9 March 2018. [Google Scholar]
- Donisi, L.; Cesarelli, G.; Capodaglio, E.; Panigazzi, M.; D’Addio, G.; Cesarelli, M.; Amato, F. A Logistic Regression Model for Biomechanical Risk Classification in Lifting Tasks. Diagnostics 2022, 12, 2624. [Google Scholar] [CrossRef]
- Conforti, I.; Mileti, I.; Del Prete, Z.; Palermo, E. Measuring biomechanical risk in lifting load tasks through wearable system and machine-learning approach. Sensors 2020, 20, 1557. [Google Scholar] [CrossRef] [PubMed]
- Prisco, G.; Romano, M.; Esposito, F.; Cesarelli, M.; Santone, A.; Donisi, L. Feasibility of tree-based Machine Learning models to discriminate safe and unsafe postures during weight lifting. In Proceedings of the 2023 IEEE International Conference on Metrology for eXtended Reality, Artificial Intelligence and Neural Engineering (IEEE MetroXRAINE 2023), Milan, Italy, 25–27 October 2023. [Google Scholar]
- Aiello, G.; Certa, A.; Abusohyon, I.; Longo, F.; Padovano, A. Machine Learning approach towards real time assessment of hand-arm vibration risk. IFAC-Pap. 2021, 54, 1187–1192. [Google Scholar] [CrossRef]
- Zhao, J.; Obonyo, E. Applying incremental Deep Neural Networks-based posture recognition model for ergonomics risk assessment in construction. Adv. Eng. Inform. 2021, 50, 101374. [Google Scholar] [CrossRef]
- Antwi-Afari, M.F.; Li, H.; Umer, W.; Yu, Y.; Xing, X. Construction activity recognition and ergonomic risk assessment using a wearable insole pressure system. J. Constr. Eng. Manag. 2020, 146, 04020077. [Google Scholar] [CrossRef]
- Fridolfsson, J.; Arvidsson, D.; Doerks, F.; Kreidler, T.J.; Grau, S. Workplace activity classification from shoe-based movement sensors. BMC Biomed. Eng. 2020, 2, 8. [Google Scholar] [CrossRef]
- Mudiyanselage, S.E.; Nguyen, P.H.D.; Rajabi, M.S.; Akhavian, R. Automated workers’ ergonomic risk assessment in manual material handling using sEMG wearable sensors and machine learning. Electronics 2021, 10, 2558. [Google Scholar] [CrossRef]
- Donisi, L.; Jacob, D.; Guerrini, L.; Prisco, G.; Esposito, F.; Cesarelli, M.; Amato, F.; Gargiulo, P. sEMG Spectral Analysis and Machine Learning Algorithms Are Able to Discriminate Biomechanical Risk Classes Associated with Manual Material Liftings. Bioengineering 2023, 10, 1103. [Google Scholar] [CrossRef]
- Mancini, M.; King, L.; Salarian, A.; Holmstrom, L.; McNames, J.; Horak, F.B. Mobility lab to assess balance and gait with synchronized body-worn sensors. J. Bioeng. Biomed. Sci. 2011, 007. [Google Scholar]
- Mancini, M.; Horak, F.B. Potential of APDM mobility lab for the monitoring of the progression of Parkinson’s disease. Expert Rev. Med. Devices 2016, 13, 455–462. [Google Scholar] [CrossRef] [PubMed]
- Morris, R.; Stuart, S.; McBarron, G.; Fino, P.C.; Mancini, M.; Curtze, C. Validity of Mobility Lab (version 2) for gait assessment in young adults, older adults and Parkinson’s disease. Physiol. Meas. 2019, 40, 095003. [Google Scholar] [CrossRef] [PubMed]
- Donisi, L.; Pagano, G.; Cesarelli, G.; Coccia, A.; Amitrano, F.; D’Addio, G. Benchmarking between two wearable inertial systems for gait analysis based on a different sensor placement using several statistical approaches. Measurement 2021, 173, 108642. [Google Scholar] [CrossRef]
- Schmitz-Hübsch, T.; Brandt, A.U.; Pfueller, C.; Zange, L.; Seidel, A.; Kühn, A.A.; Minnerop, M.; Doss, S. Accuracy and repeatability of two methods of gait analysis–GaitRite™ und mobility lab™–in subjects with cerebellar ataxia. Gait Posture 2016, 48, 194–201. [Google Scholar] [CrossRef]
- Straker, L. Evidence to support using squat, semi-squat and stoop techniques to lift low-lying objects. Int. J. Ind. Ergon. 2003, 31, 149–160. [Google Scholar] [CrossRef]
- Bazrgari, B.; Shirazi-Adl, A.; Arjmand, N. Analysis of squat and stoop dynamic liftings: Muscle forces and internal spinal loads. Eur. Spine J. 2007, 16, 687–699. [Google Scholar] [CrossRef]
- Schafer, R.W. What is a Savitzky-Golay filter? [lecture notes]. IEEE Signal Process. Mag. 2011, 28, 111–117. [Google Scholar] [CrossRef]
- Geethanjali, P.; Mohan, Y.K.; Sen, J. Time domain feature extraction and classification of EEG data for brain computer interface. In Proceedings of the 2012 9th International Conference on Fuzzy Systems and Knowledge Discovery, Sichuan, China, 29–31 May 2012. [Google Scholar]
- Fan, S.; Jia, Y.; Jia, C. A feature selection and classification method for activity recognition based on an inertial sensing unit. Information 2019, 10, 290. [Google Scholar] [CrossRef]
- Barandas, M.; Folgado, D.; Fernandes, L.; Santos, S.; Abreu, M.; Bota, P.; Liu, H.; Schultz, T.; Gamboa, H. TSFEL: Time series feature extraction library. SoftwareX 2020, 11, 100456. [Google Scholar] [CrossRef]
- Pan, Y.N.; Chen, J.; Li, X.L. Spectral entropy: A complementary index for rolling element bearing performance degradation assessment. Proc. Inst. Mech. Eng. Part C J. Mech. Eng. Sci. 2009, 223, 1223–1231. [Google Scholar] [CrossRef]
- Zhou, Z.H. Machine Learning, 1st ed.; Springer Nature: Nanjing, China, 2021. [Google Scholar]
- Cunningham, P.; Cord, M.; Delany, S.J. Supervised learning. In Machine Learning Techniques for Multimedia: Case Studies on Organization and Retrieval; Springer: Berlin/Heidelberg, Germany, 2008; pp. 21–49. [Google Scholar]
- Noble, W.S. What is a support vector machine? Nat. Biotechnol. 2006, 24, 1565–1567. [Google Scholar] [CrossRef] [PubMed]
- Kotsiantis, S.B. Decision trees: A recent overview. Artif. Intell. Rev. 2013, 39, 261–283. [Google Scholar] [CrossRef]
- Friedman, J.H. Greedy function approximation: A gradient boosting machine. Ann. Stat. 2001, 29, 1189–1232. [Google Scholar] [CrossRef]
- Biau, G.; Scornet, E. A random forest guided tour. Test 2016, 25, 197–227. [Google Scholar] [CrossRef]
- Christodoulou, E.; Ma, J.; Collins, G.S.; Steyerberg, E.W.; Verbakel, J.Y.; Van Calster, B. A systematic review shows no performance benefit of machine learning over logistic regression for clinical prediction models. J. Clin. Epidemiol. 2019, 110, 12–22. [Google Scholar] [CrossRef]
- Peterson, L.E. K-nearest neighbor. Scholarpedia 2009, 4, 1883. [Google Scholar] [CrossRef]
- Pal, S.K.; Mitra, S. Multilayer perceptron, fuzzy sets, classifiaction. IEEE Trans. Neural Netw. 1992, 3, 683–697. [Google Scholar] [CrossRef]
- Specht, D.F. Probabilistic neural networks. Neural Netw. 1990, 3, 109–118. [Google Scholar] [CrossRef]
- Zheng, A.; Casari, A. Feature Engineering for Machine Learning: Principles and Techniques for Data Scientists; O’Reilly Media, Inc: Sebastopol, CA, USA, 2018. [Google Scholar]
- Azhagusundari, B.; Thanamani, A.S. Feature selection based on information gain. Int. J. Innov. Technol. Explor. Eng. 2013, 2, 18–21. [Google Scholar]
- Jacob, D.; Unnsteinsdóttir Kristensen, I.S.; Aubonnet, R.; Recenti, M.; Donisi, L.; Ricciardi, C.; Svansson, H.A.R.; Agnarsdottir, S.; Colacino, A.; Jonsdottir, M.K.; et al. Towards defining biomarkers to evaluate concussions using virtual reality and a moving platform (BioVRSea). Sci. Rep. 2022, 12, 8996. [Google Scholar] [CrossRef] [PubMed]
- An, J.Y.; Seo, H.; Kim, Y.G.; Lee, K.E.; Kim, S.; Kong, H.J. Codeless Deep Learning of COVID-19 Chest X-Ray Image Dataset with KNIME Analytics Platform. Healthc. Inform. Res. 2021, 27, 82–91. [Google Scholar] [CrossRef] [PubMed]
- Ricciardi, C.; Ponsiglione, A.M.; Scala, A.; Borrelli, A.; Misasi, M.; Romano, G.; Russo, G.; Triassi, M.; Improta, G. Machine learning and regression analysis to model the length of hospital stay in patients with femur fracture. Bioengineering 2022, 9, 172. [Google Scholar] [CrossRef] [PubMed]
- Hung, J.S.; Liu, P.L.; Chang, C.C. A deep learning-based approach for human posture classification. In Proceedings of the 2020 2nd International Conference on Management Science and Industrial Engineering, Osaka, Japan, 7–9 April 2020. [Google Scholar]
- Greene, R.L.; Hu, Y.H.; Difranco, N.; Wang, X.; Lu, M.L.; Bao, S.; Lin, J.; Radwin, R.G. Predicting sagittal plane lifting postures from image bounding box dimensions. Hum. Factors 2019, 61, 64–77. [Google Scholar] [CrossRef]
- Chae, S.; Choi, A.; Jung, H.; Kim, T.H.; Kim, K.; Mun, J.H. Machine learning model to estimate net joint moments during lifting task using wearable sensors: A preliminary study for design of exoskeleton control system. Appl. Sci. 2021, 11, 11735. [Google Scholar] [CrossRef]
- Ryu, J.; Seo, J.; Liu, M.; Lee, S.; Haas, C.T. Action recognition using a wristband-type activity tracker: Case study of masonry work. In Proceedings of the 2016 Construction Research Congress, San Juan, Puerto Rico, 31 May–2 June 2016. [Google Scholar]
- O’Reilly, M.; Whelan, D.; Chanialidis, C.; Friel, N.; Delahunt, E.; Ward, T.; Caulfield, B. Evaluating squat performance with a single inertial measurement unit. In Proceedings of the 2015 IEEE 12th International Conference on Wearable and Implantable Body Sensor Networks (BSN), Cambridge, MA, USA, 9–12 June 2015. [Google Scholar]
- Youssef, F.; Zaki, A.B.; Gomaa, W. Analysis of the Squat Exercise from Visual Data. In Proceedings of the 19th International Conference on Informatics in Control, Automation and Robotics (ICINCO), Lisbon, Portugal, 14–16 July 2022. [Google Scholar]
- Chen, Y.; Shen, C.; Wei, X.S.; Liu, L.; Yang, J. Adversarial posenet: A structure-aware convolutional network for human pose estimation. In Proceedings of the IEEE International Conference on Computer Vision, Venice, Italy, 22–29 October 2017. [Google Scholar]






{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Characteristics | |
|---|---|
| Age (years) | 33.2 ± 7.8 |
| Height (cm) | 171.1 ± 8.3 |
| Weight (kg) | 66.1 ± 9.9 |
| Body mass index (kg/m2) | 22.5 ± 2.9 |
| Parameters | ||||
|---|---|---|---|---|
| Vertical Displacement (Start–End) (cm) | Duration (min) | Frequency (lifting/min) | Weight Lifted (kg) | |
| M | F | |||
| 50–125 | 8 | 2.5 | 7 | 5 |
| Features * | Safe Posture Mean ± STD | Unsafe Posture Mean ± STD | p-Value |
|---|---|---|---|
| SE_acc | 0.569 ± 0.038 | 0.604 ± 0.029 | <0.001 |
| Kurt_acc | 111.448 ± 39.195 | 82.120 ± 39.200 | <0.001 |
| Skew_acc | 8.829 ± 1.580 | 7.346 ± 1.762 | <0.001 |
| P_acc | 150.342 ± 96.122 | 96.717 ± 48.214 | <0.001 |
| PP_acc | 3.809 ± 1.716 | 3.620 ± 1.073 | 0.105 |
| STD_acc | 0.480 ± 0.109 | 0.450 ± 0.114 | <0.001 |
| MAV_acc | 0.330 ± 0.060 | 0.322 ± 0.078 | 0.127 |
| ZCR_acc | 102.112 ± 17.360 | 86.028 ± 21.610 | <0.001 |
| SSC_acc | 350.304 ± 45.250 | 271.169 ± 55.144 | <0.001 |
| Features * | Safe Posture Mean ± STD | Unsafe Posture Mean ± STD | p-Value |
|---|---|---|---|
| SE_vel | 0.547 ± 0.039 | 0.559 ± 0.034 | <0.001 |
| Kurt_vel | 119.318 ± 38.884 | 98.303 ± 34.176 | <0.001 |
| Skew_vel | 9.458 ± 1.597 | 8.472 ± 1.554 | <0.001 |
| P_vel | 8.566 ± 17.438 | 10.898 ± 6.859 | <0.001 |
| PP_vel | 0.866 ± 0.832 | 1.064 ± 0.368 | <0.001 |
| STD_vel | 0.105 ± 0.046 | 0.137 ± 0.042 | <0.001 |
| MAV_vel | 0.073 ± 0.025 | 0.100 ± 0.031 | <0.001 |
| ZCR_vel | 79.261 ± 16.200 | 63.158 ± 17.668 | <0.001 |
| SSC_vel | 295.074 ± 39.092 | 223.753 ± 46.063 | <0.001 |
| SVM | DT | GB | RaF | LR | kNN | MLP | PNN | |
|---|---|---|---|---|---|---|---|---|
| Accuracy | 0.94 ± 0.12 | 0.88 ± 0.17 | 0.94 ± 0.10 | 0.95 ± 0.09 | 0.96 ± 0.11 | 0.91 ± 0.12 | 0.92 ± 0.15 | 0.79 ± 0.16 |
| F-measure | 0.95 ± 0.09 | 0.89 ± 0.14 | 0.94 ± 0.11 | 0.94 ± 0.13 | 0.97 ± 0.08 | 0.92 ± 0.09 | 0.94 ± 0.11 | 0.84 ± 0.10 |
| Specificity | 0.89 ± 0.24 | 0.82 ± 0.29 | 0.94 ± 0.11 | 0.95 ± 0.11 | 0.92 ± 0.21 | 0.84 ± 0.23 | 0.83 ± 0.30 | 0.61 ± 0.30 |
| Sensitivity | 0.99 ± 0.01 | 0.94 ± 0.14 | 0.95 ± 0.11 | 0.95 ± 0.17 | 0.99 ± 0.01 | 0.98 ± 0.04 | 1.00 ± 0.00 | 0.98 ± 0.04 |
| Precision | 0.92 ± 0.14 | 0.88 ± 0.17 | 0.95 ± 0.10 | 0.96 ± 0.08 | 0.95 ± 0.12 | 0.88 ± 0.15 | 0.90 ± 0.17 | 0.74 ± 0.15 |
| Recall | 0.99 ± 0.01 | 0.94 ± 0.14 | 0.95 ± 0.11 | 0.95 ± 0.17 | 0.99 ± 0.01 | 0.98 ± 0.04 | 1.00 ± 0.00 | 0.98 ± 0.04 |
| AUCROC | 0.99 ± 0.02 | 0.86 ± 0.21 | 0.99 ± 0.03 | 0.99 ± 0.01 | 0.99 ± 0.01 | 0.96 ± 0.07 | 0.99 ± 0.04 | 0.87 ± 0.19 |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2024 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Prisco, G.; Romano, M.; Esposito, F.; Cesarelli, M.; Santone, A.; Donisi, L.; Amato, F. Capability of Machine Learning Algorithms to Classify Safe and Unsafe Postures during Weight Lifting Tasks Using Inertial Sensors. Diagnostics 2024, 14, 576. https://doi.org/10.3390/diagnostics14060576
Prisco G, Romano M, Esposito F, Cesarelli M, Santone A, Donisi L, Amato F. Capability of Machine Learning Algorithms to Classify Safe and Unsafe Postures during Weight Lifting Tasks Using Inertial Sensors. Diagnostics. 2024; 14(6):576. https://doi.org/10.3390/diagnostics14060576
Chicago/Turabian StylePrisco, Giuseppe, Maria Romano, Fabrizio Esposito, Mario Cesarelli, Antonella Santone, Leandro Donisi, and Francesco Amato. 2024. "Capability of Machine Learning Algorithms to Classify Safe and Unsafe Postures during Weight Lifting Tasks Using Inertial Sensors" Diagnostics 14, no. 6: 576. https://doi.org/10.3390/diagnostics14060576
APA StylePrisco, G., Romano, M., Esposito, F., Cesarelli, M., Santone, A., Donisi, L., & Amato, F. (2024). Capability of Machine Learning Algorithms to Classify Safe and Unsafe Postures during Weight Lifting Tasks Using Inertial Sensors. Diagnostics, 14(6), 576. https://doi.org/10.3390/diagnostics14060576