Research on the Mechanism of the Stiffness Performance of Rolling Bearings under Wrong Assembly State


Abstract
:1. Introduction
2. Bearing Stiffness Solution Model Construction
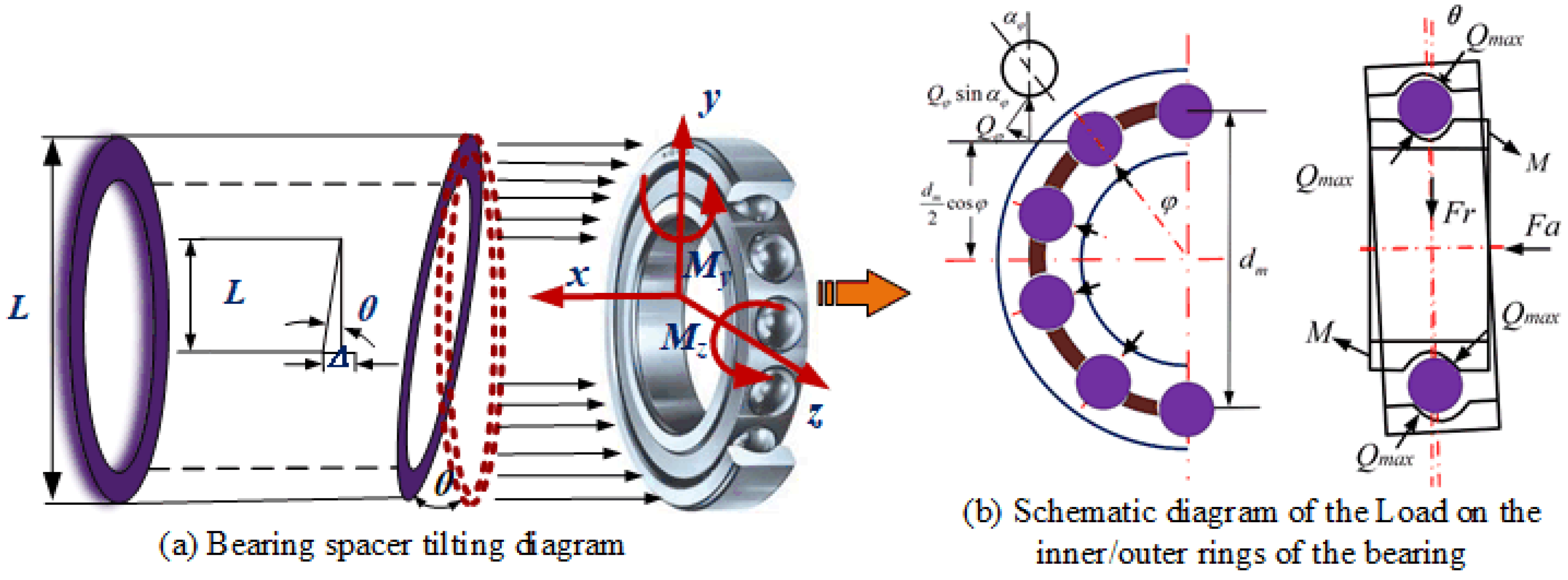
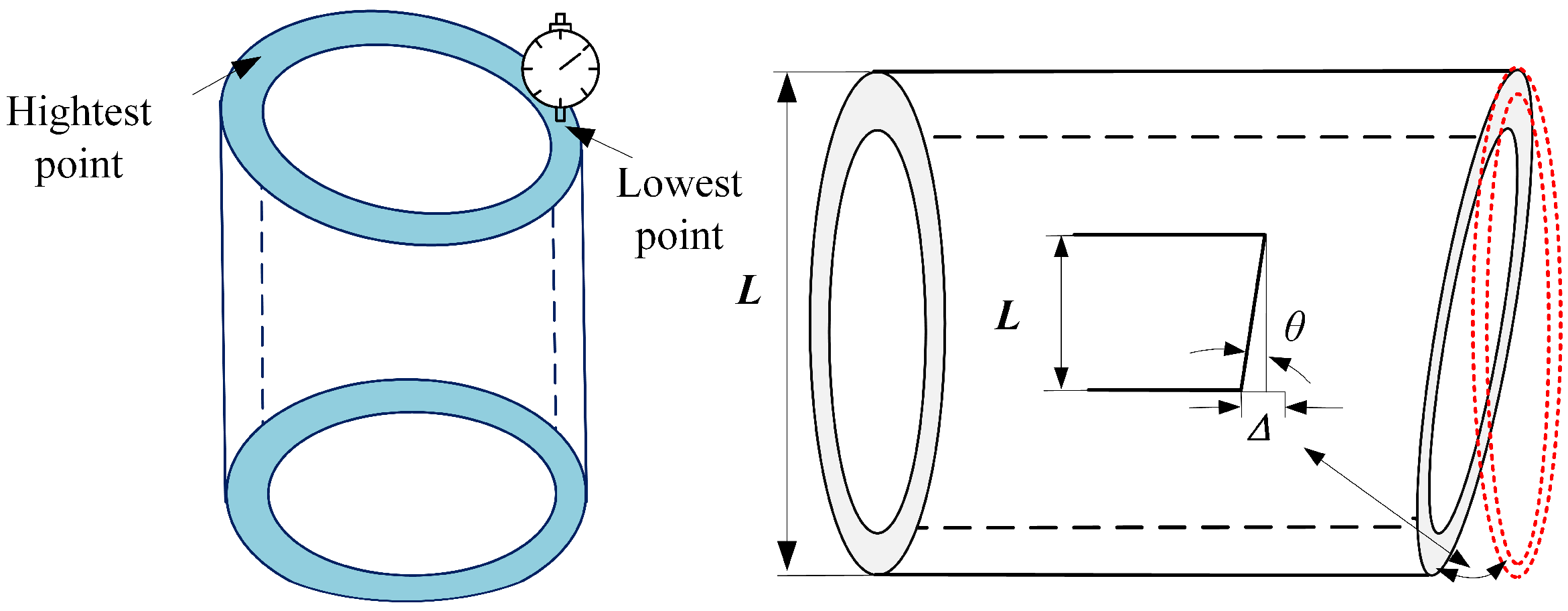
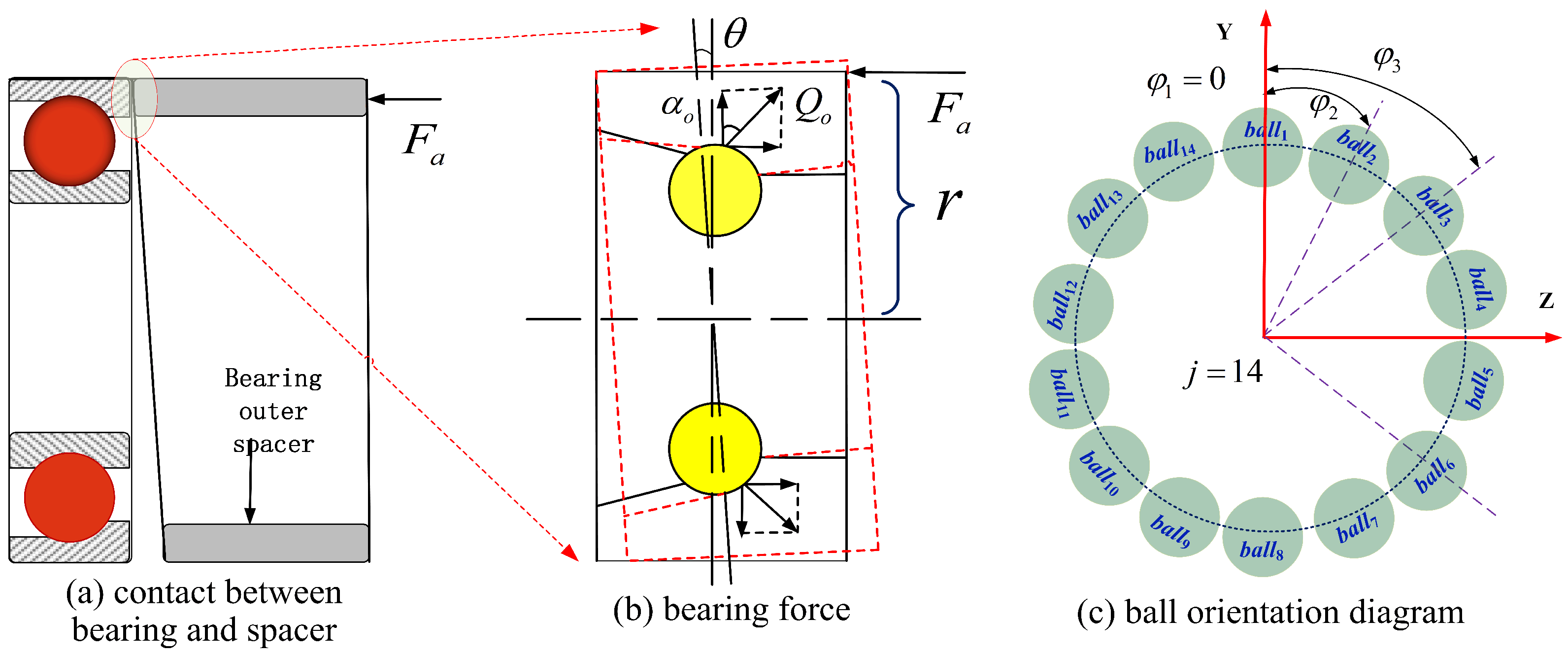
2.1. Equivalent Transformation of Bearing Spacer Non-Parallel
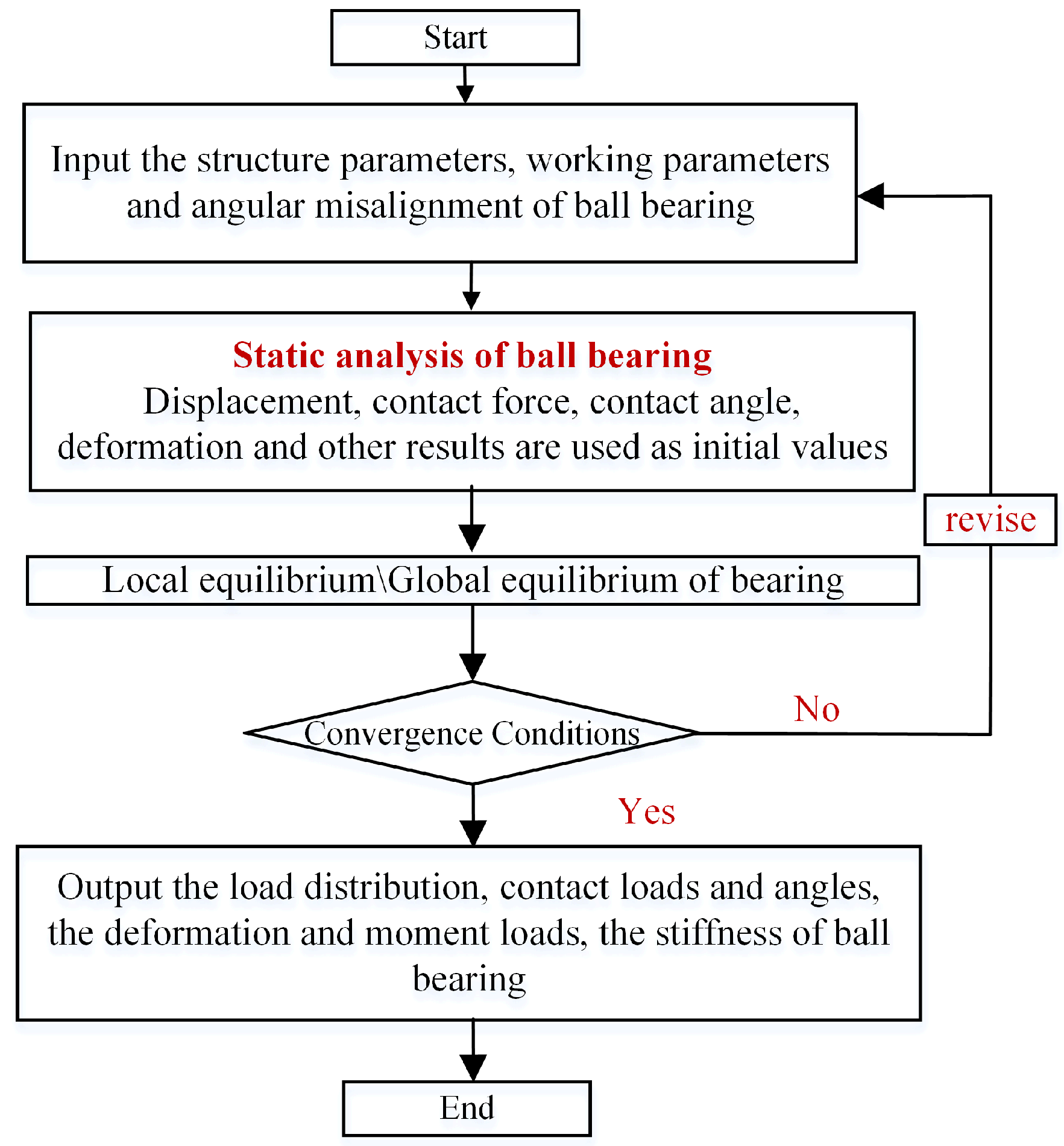
2.2. Bearing Stiffness Solution
3. Bearing Stiffness Solution Condition Settings
4. Analysis of Factors Influencing Bearing Stiffness
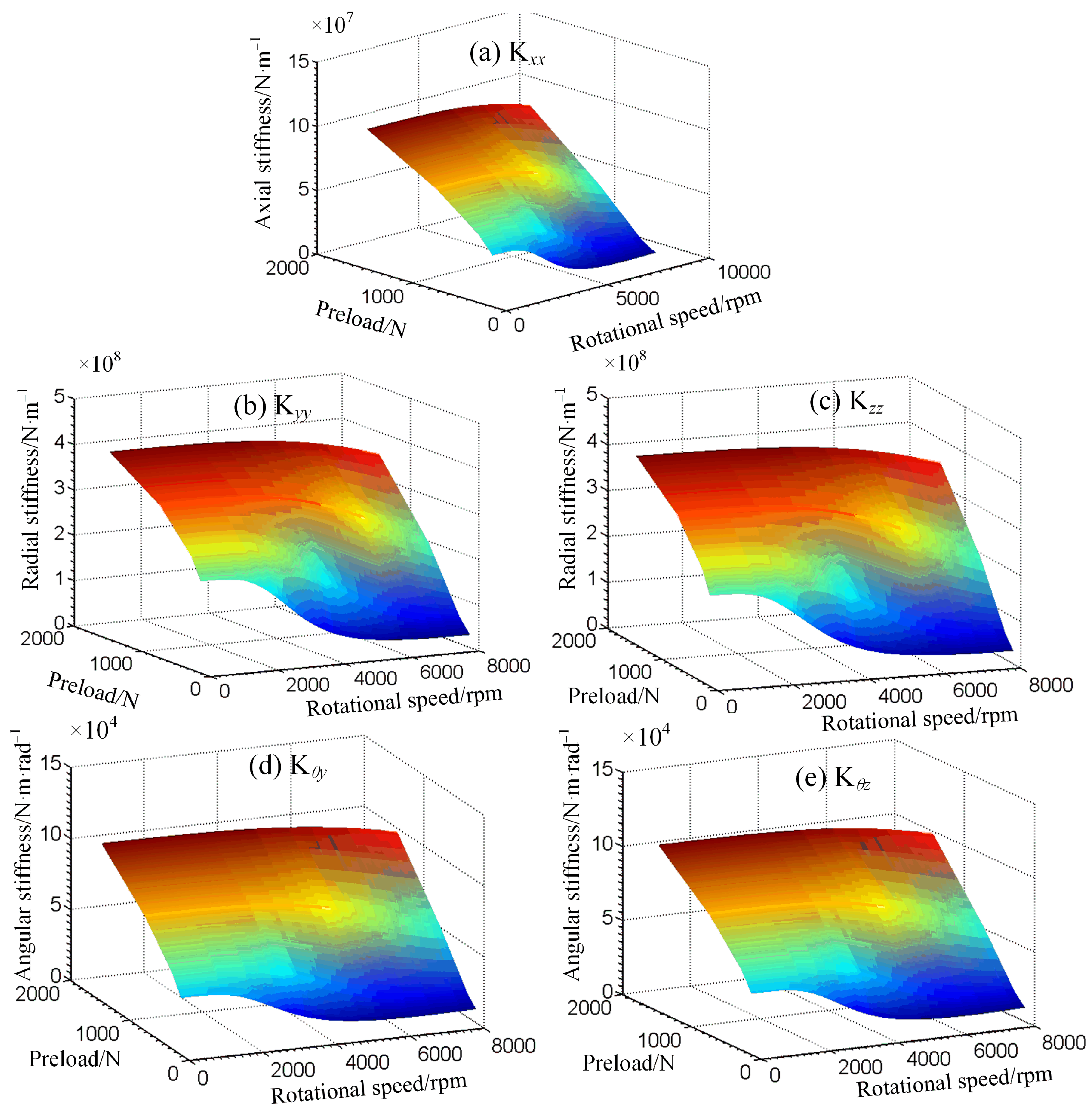
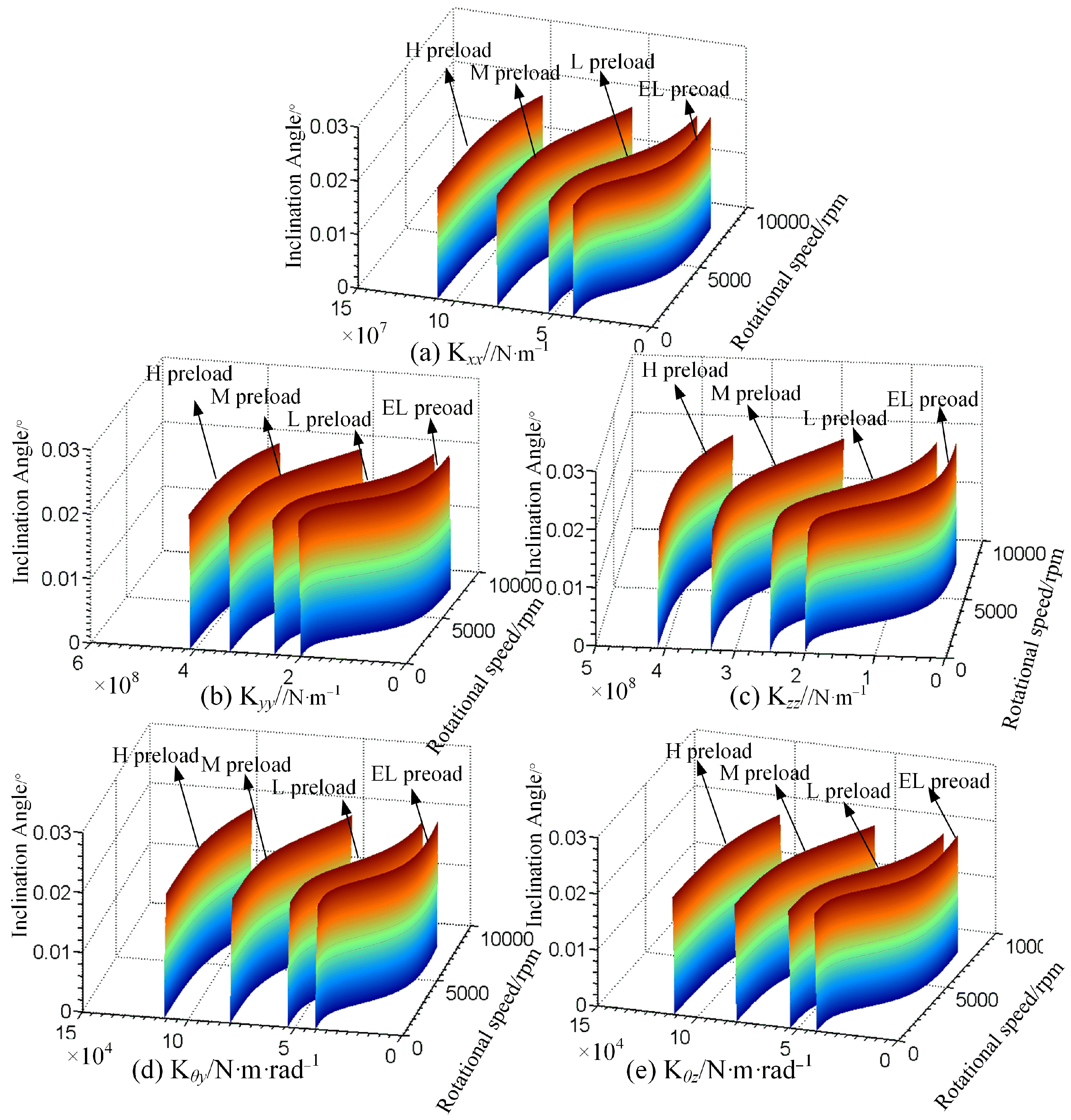
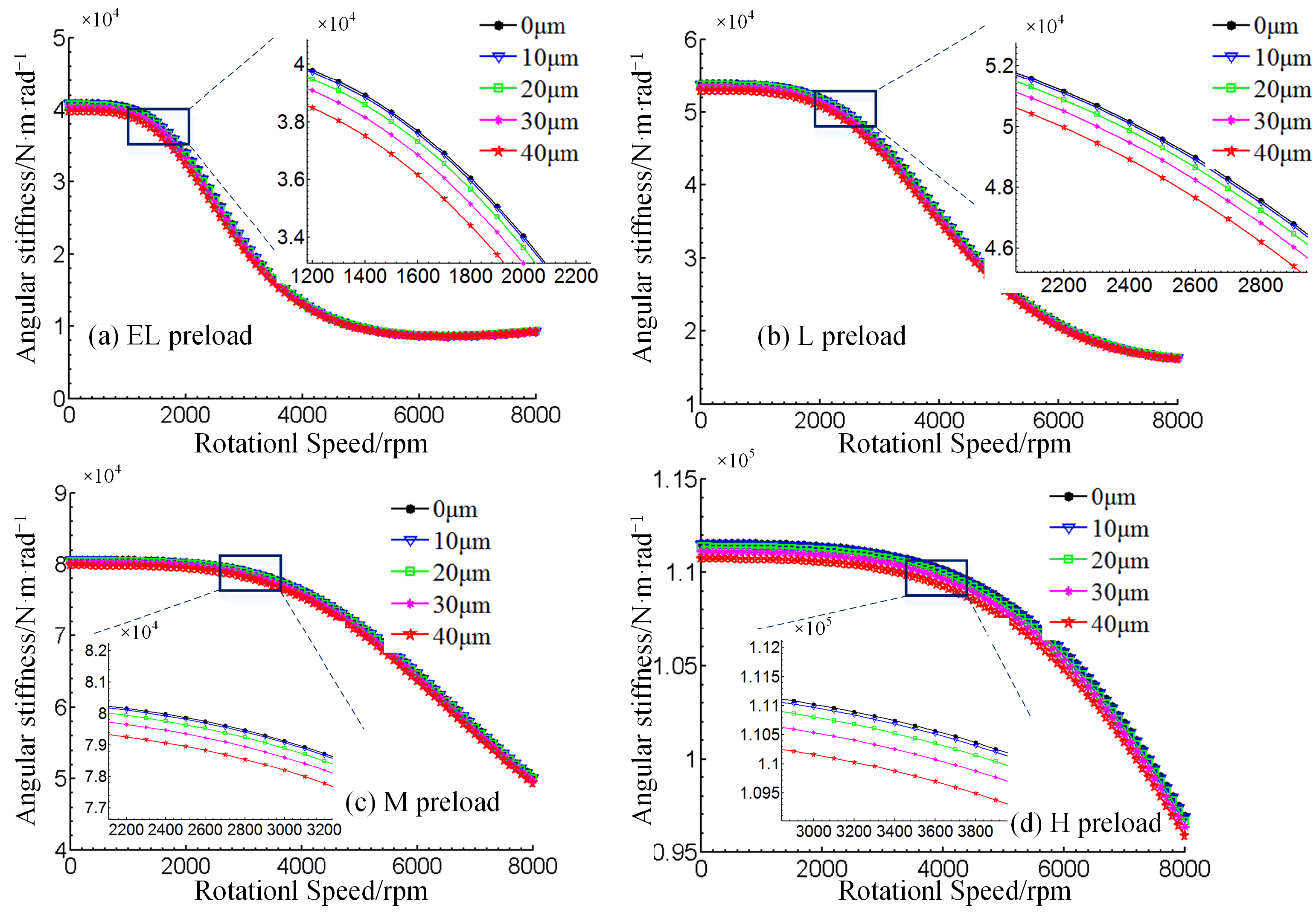
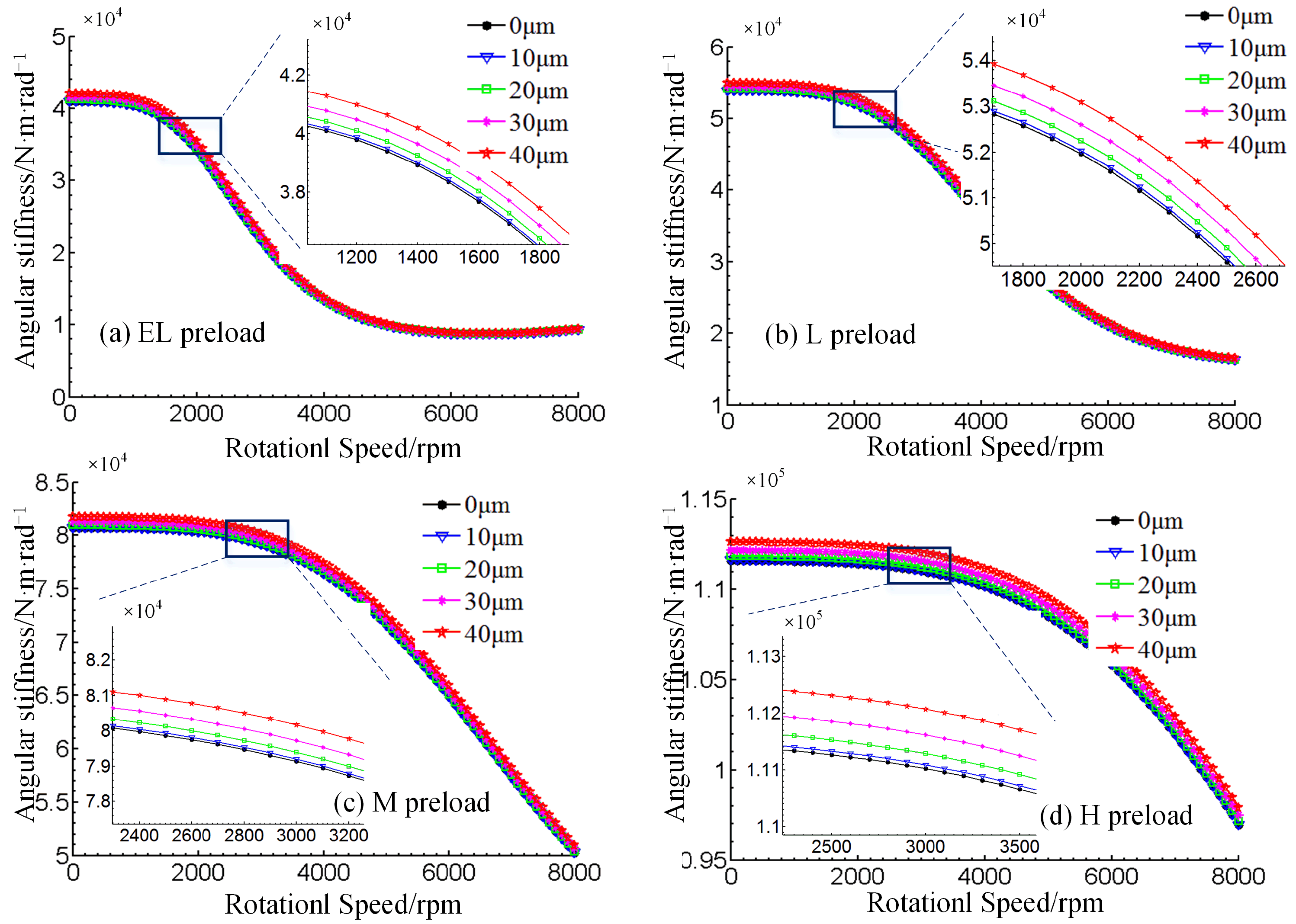
4.1. Bearing Stiffness Variation Law under Different Working Conditions
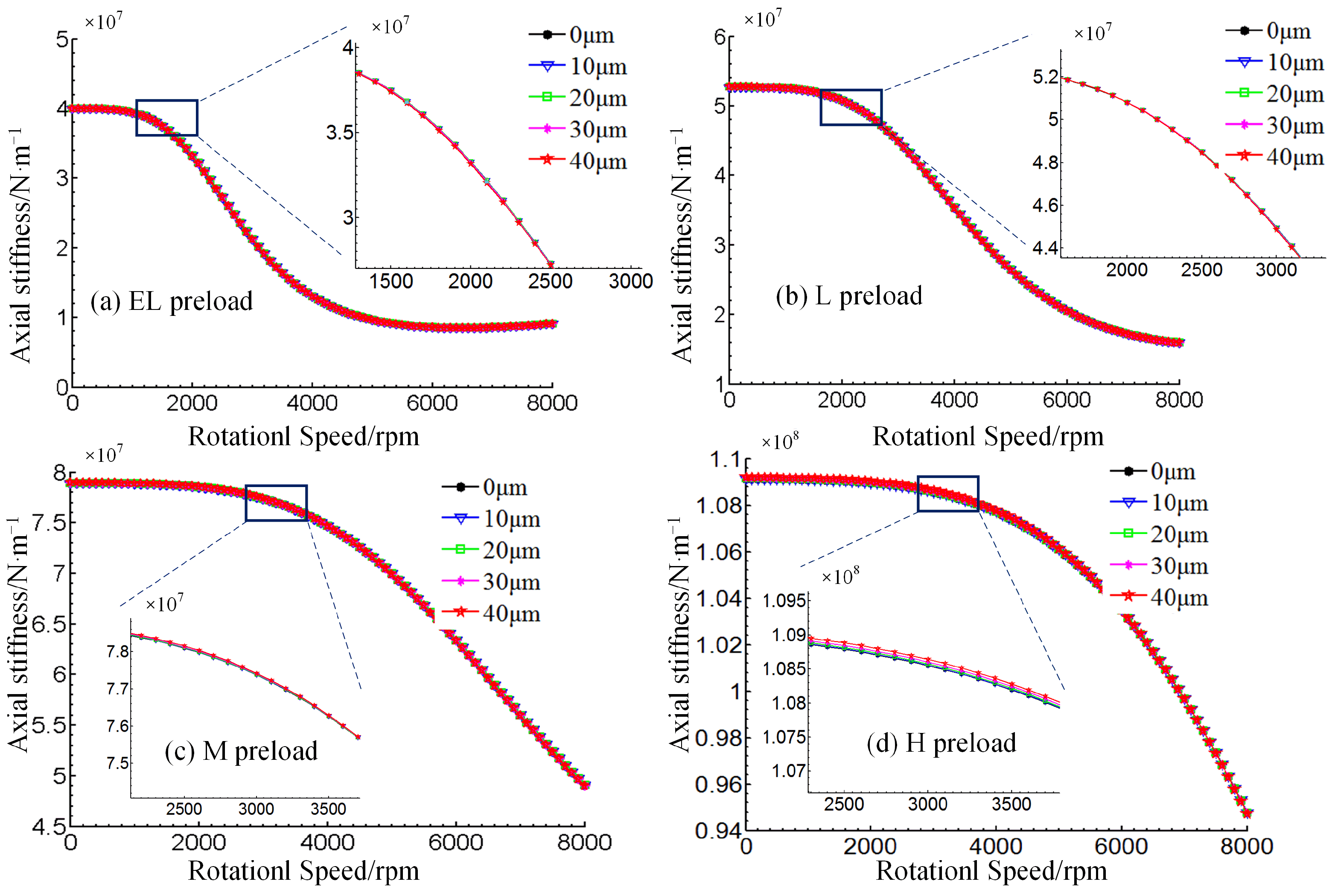
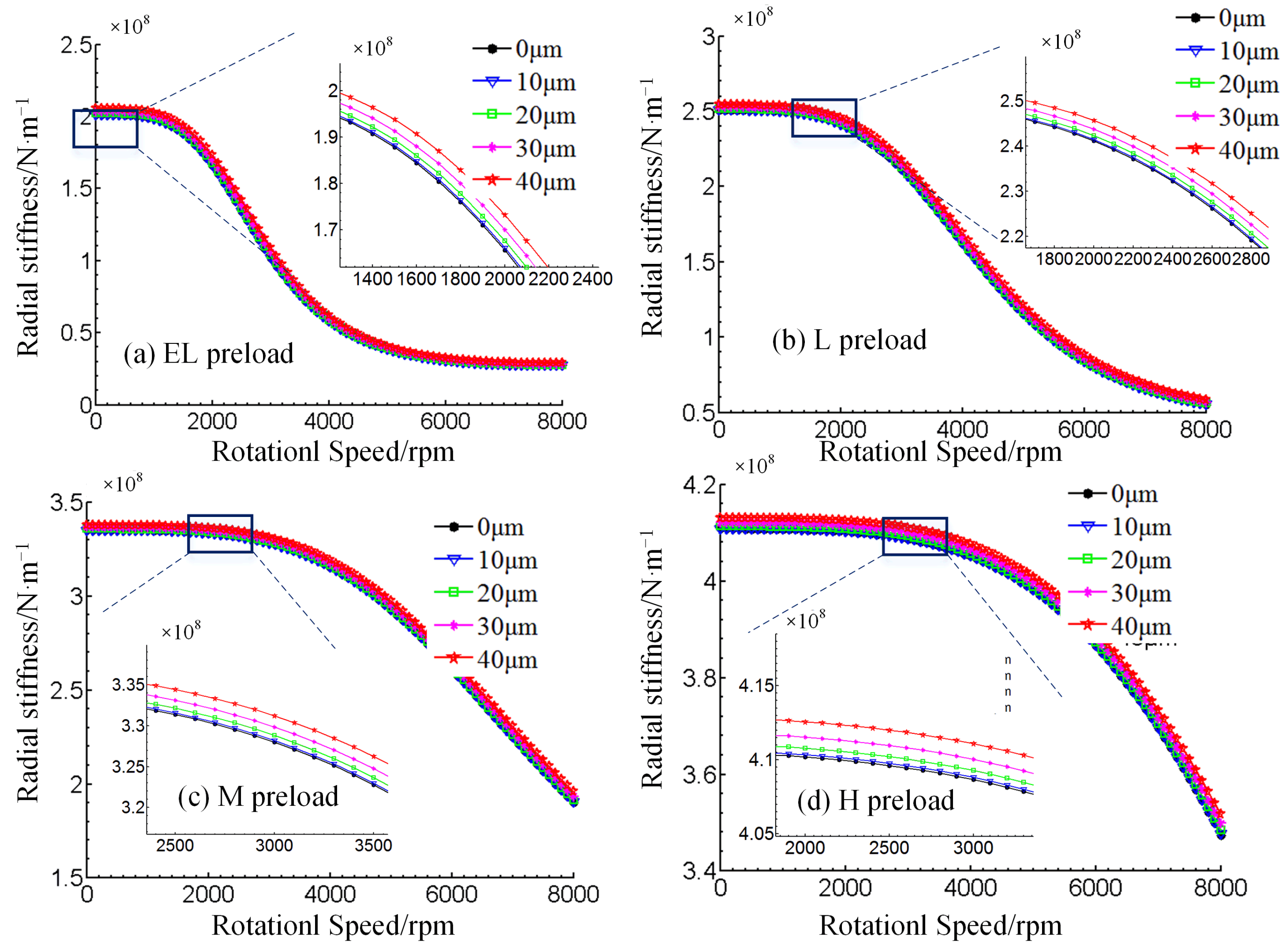
4.2. Analysis of the Variation of Bearing Stiffness in All Directions in Relation to Speed
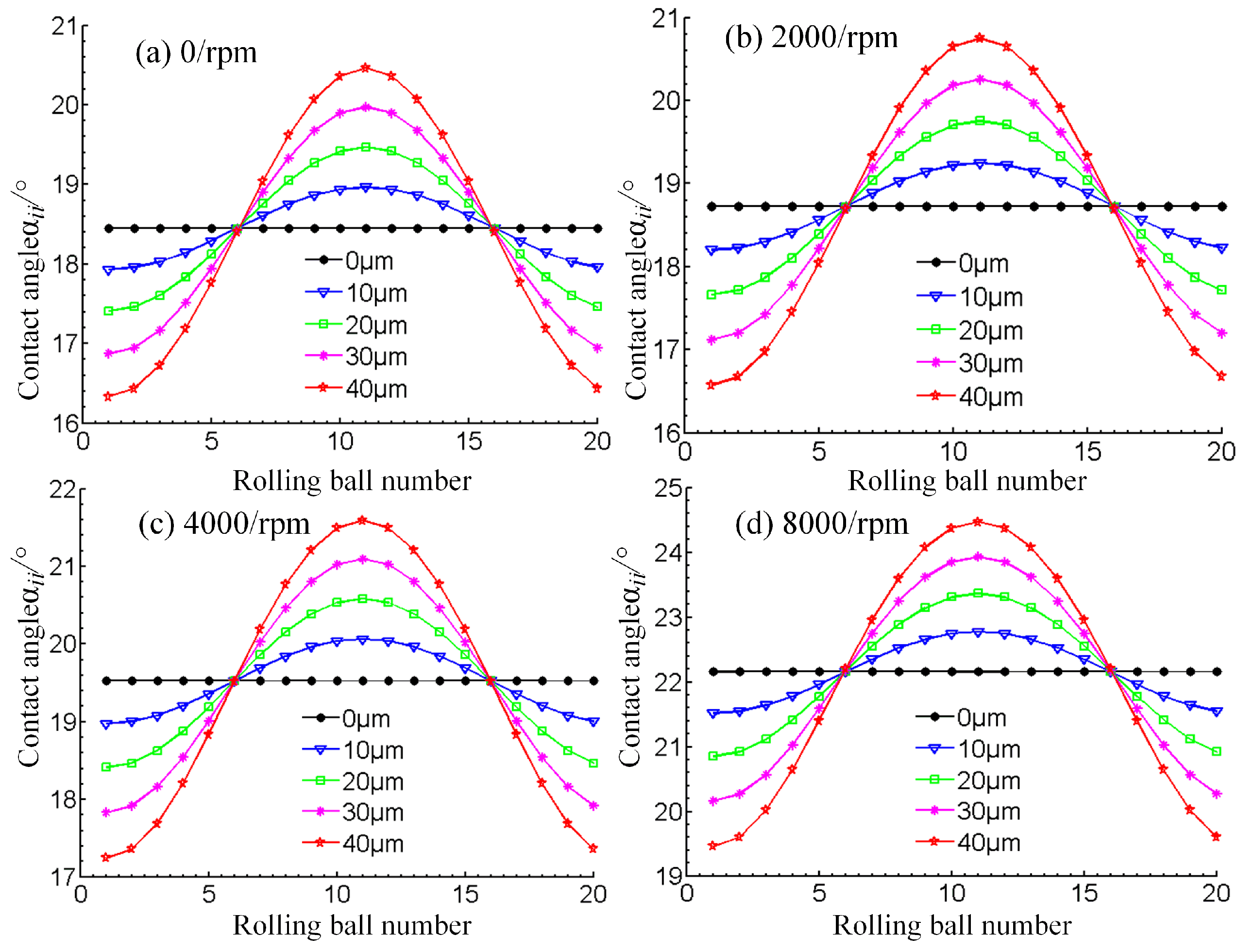
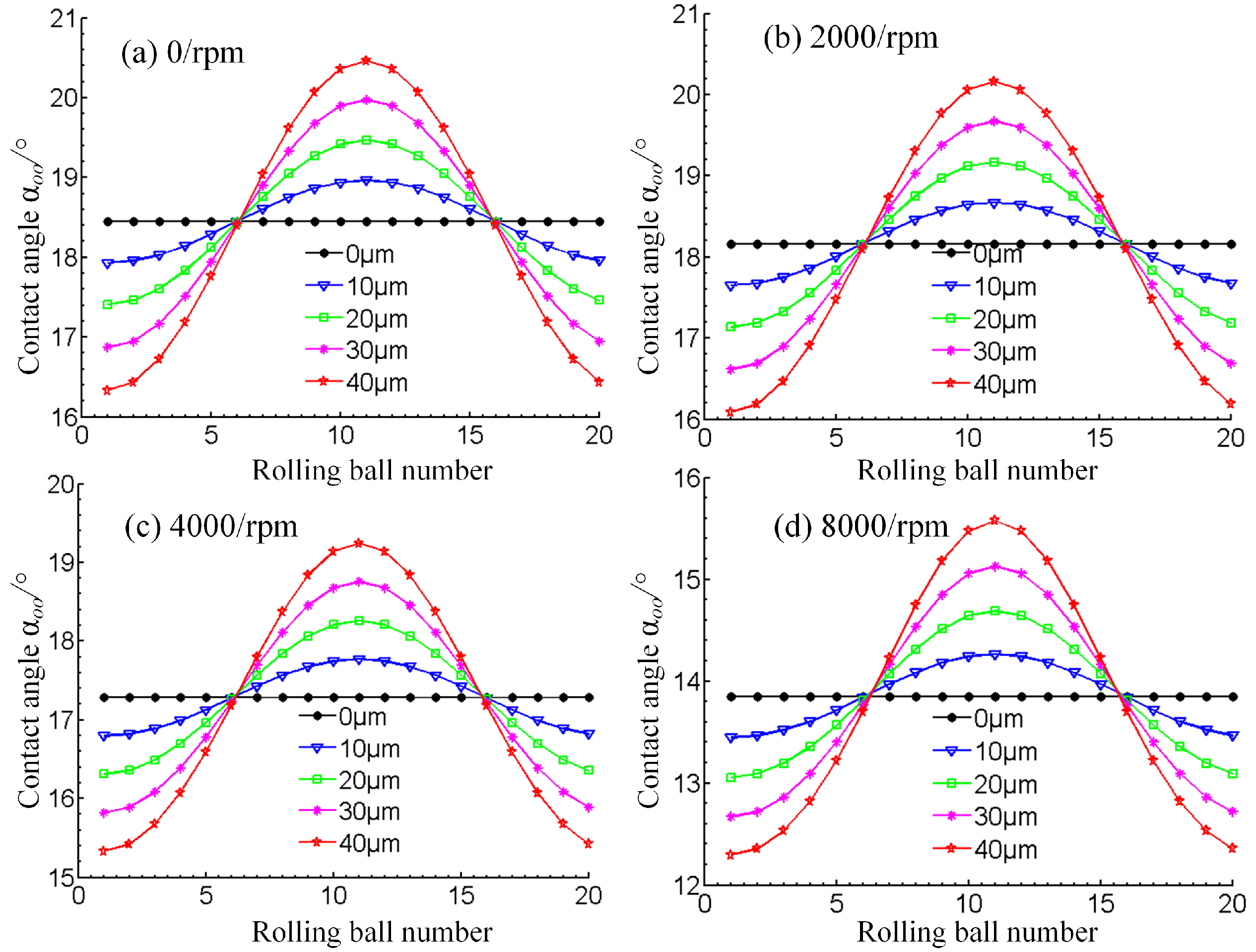
4.3. Analysis of Bearing Stiffness Variability in All Directions
5. Conclusions
- Bearing inner and outer ring tilt angle has a greater impact on bearing radial stiffness than on axial stiffness.
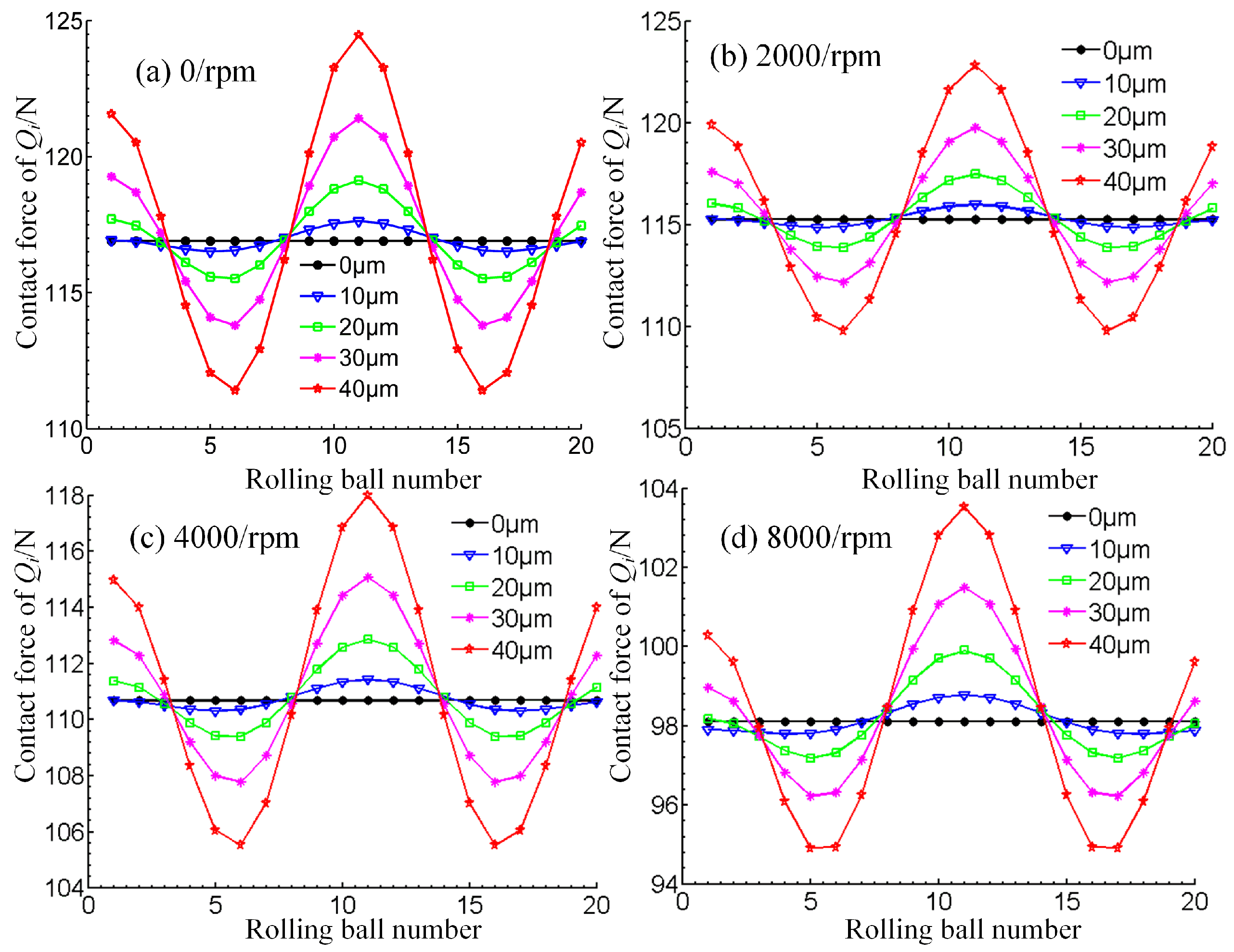
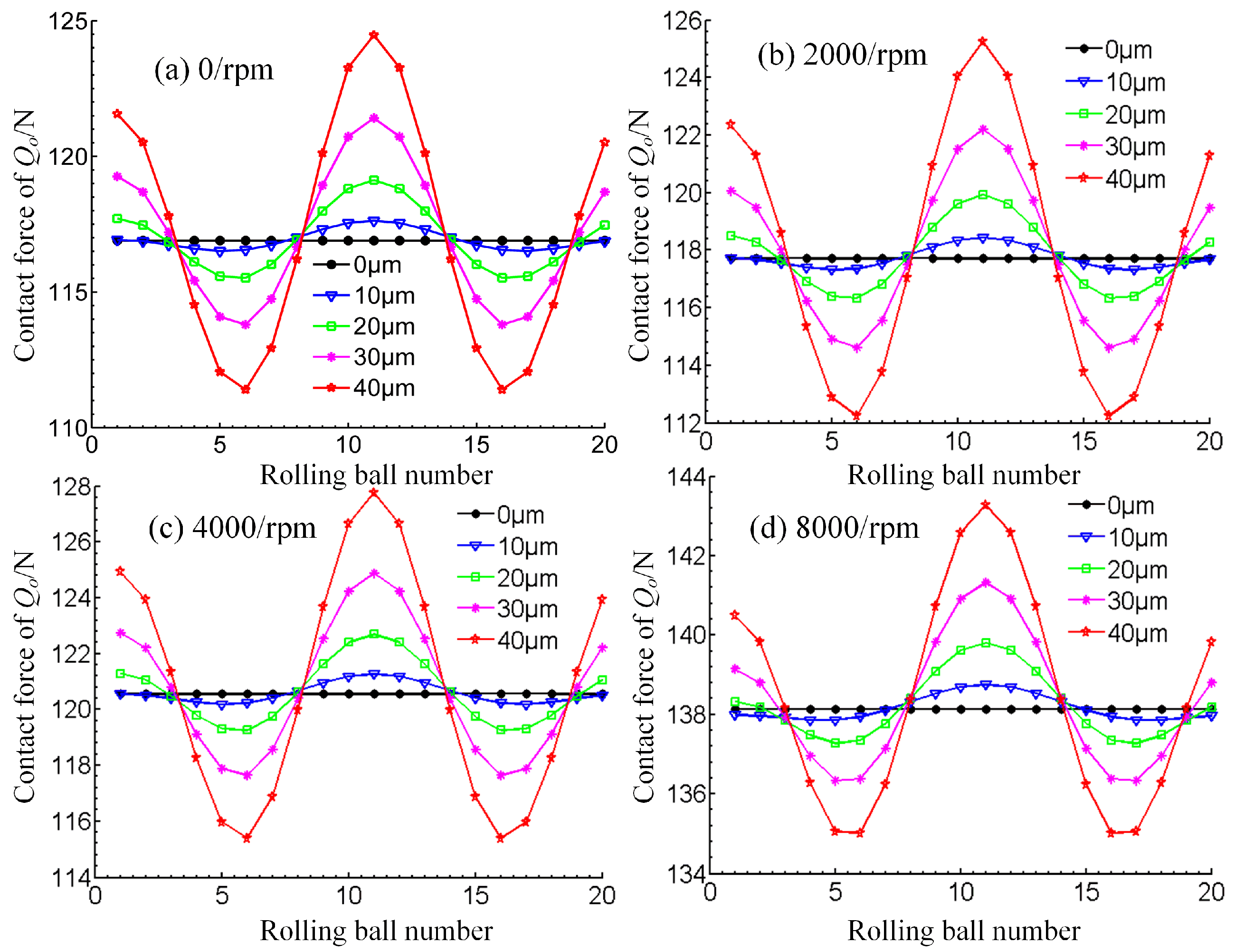
- The inner and outer rings of the bearing changes lead to variations of the inner ring contact load, revealing the reasons for the bearing’s anisotropic stiffness.
- Among the three influence factors of bearing preload, rotational speed and spacer inclination, although the inclination has the smallest influence on the macroscopic stiffness of the bearing, it will cause uneven radial stiffness of the bearing, which is very important for a precision spindle.
- Moreover, the anisotropy of radial stiffness, caused by the inclination of the bearing spacer, will be verified through experiments in the follow-up research. In the future, the study on the precision spindle system stiffness, induced by bearing anisotropy of radial stiffness, will be exhaustive.
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Conflicts of Interest
References
- Wan, C.S. Analysis Method of Rolling Bearing; China Machanical Press: Beijing, China, 1995. (In Chinese) [Google Scholar]
- Yang, Z.; Li, C.; Zhou, N.; Zhang, J. Research on the cage stability of high-precision ball bearing with image acquirement and error separation. Measurement 2021, 186, 110149. [Google Scholar] [CrossRef]
- Sier, D.; Xinglin, L.; Jiugen, W. Frictional torque characteristics of angular contact ball bearings. J. Mech. Eng. 2011, 47, 114–120. [Google Scholar]
- Yang, Z.; Niu, X.; Li, C. Experimental study on cage dynamic behavior of long-life high-precision ball bearing with trajectory deviation. IEEE Trans. Instrum. Meas. 2022, 71, 5011511. [Google Scholar] [CrossRef]
- Liu, J.; Tang, C.; Wu, H.; Xu, Z.; Wang, L. An analytical calculation method of the load distribution and stiffness of an angular contact ball bearing. Mech. Mach. Theory 2019, 142, 103597. [Google Scholar] [CrossRef]
- Abele, E.; Altintas, Y.; Brecher, C. Machine tool spindle units. CIRP Ann 2010, 59, 781–802. [Google Scholar] [CrossRef]
- Lin, C.-W.; Lin, Y.-K.; Chu, C.-H. Dynamic models and design of spindle-bearing systems of machine tools: A review. Int. J. Precis. Eng. Manuf. 2013, 14, 513–521. [Google Scholar] [CrossRef]
- Ma, S.; Zhang, X.; Yan, K.; Zhu, Y.; Hong, J. A Study on Bearing Dynamic Features under the Condition of Multiball–Cage Collision. Lubricants 2022, 10, 9. [Google Scholar] [CrossRef]
- Gao, S.H.; Meng, G.; Long, X.H. Study of milling stability with Hertz contact stiffness of ball bearings. Arch. Appl. Mech. 2011, 81, 1141–1151. [Google Scholar] [CrossRef]
- Jones, A.B. A general theory for elastically constrained ball and radial roller bearings under arbitrary laod and speed conditions. J. Basic Eng. 1960, 82, 309–320. [Google Scholar] [CrossRef]
- Harris, T.A. Rolling Bearing Analysis, 4th ed.; John Wiley and Sons, Inc.: New York, NY, USA, 2000. [Google Scholar]
- Jedrzejewski, J.; Kwasny, W. Modelling of angular contact ball bearings and axial displacements for high-speed spindles. CIRP Ann. 2010, 59, 377–382. [Google Scholar] [CrossRef]
- Rantatalo, M.; Aidanpaa, J.-O.; Göransson, B. Milling machine spindle analysis using fem and non-contact spindle excitation and response meaure-ment. Int. J. Mach. Tools Manuf. 2007, 47, 1034–1045. [Google Scholar] [CrossRef]
- Sheng, X.; Li, B.; Wu, Z.; Li, H. Calculation of ball bearing speed-varying stiffness. Mech. Mach. Theory 2014, 81, 166–180. [Google Scholar] [CrossRef]
- Noel, D.; Ritou, M.; Furet, B.; Le Loch, S. Complete Analytical Expression of the Stiffness Matrix of Angular Contact Ball Bearings. J. Tribol. 2013, 135, 041101. [Google Scholar] [CrossRef]
- Guo, Y.; Parker, R.G. Stiffness matrix calculation of rolling element bearings using a finite element contact mechanics model. Mech. Mach. Theory 2012, 51, 32–45. [Google Scholar] [CrossRef]
- Cao, H.R.; Tomas, H.; Yusuf, A. A comparative study on the dynamics of high speed spindles with respect to different preload mechanisms. Int. J. Adv. Manuf. Technol. 2011, 57, 871–883. [Google Scholar] [CrossRef]
- Aramaki, H.; Shoda, Y.; Morishita, Y.; Sawamoto, T. The performance of ball bearing with silicon nitride ceramic balls in high speed spindles for machine tools. ASME J. Tribol. 1988, 10, 693–698. [Google Scholar] [CrossRef]
- Yang, Z.W.; Yin, G.F.; Sang, X.; Jiang, H.; Zhong, K.Y. Coupling Analysis Model of Thermal and Dynamic Characteristics for High-speed Motorized Spindle. J. Jilin Univ. (Eng. Technol. Ed.) 2011, 41, 205–210. [Google Scholar]
- Liu, X.; Hong, J.; Zhu, Y.S.; Liu, Z. Iterative Method to Solve Bearing’s Force and Stiffness for a Multi-support Spindle System Based on Finite Element Analysis. J. Xi’an Jiaotong Univ. 2010, 44, 41–45. [Google Scholar]
- Stone, B.J.; Walford, T. The measurement of the radial stiffness of rolling element bearings under oscillating conditions. J. Mech. Eng. Sci. 1980, 22, 175–181. [Google Scholar]
- Kraus, J.; Blech, J.; Braun, S. In situ determination of rolling bearing stiffness and damping by modal analysis. J. Vib. Acoust. Stress Reliab. Des. 1987, 109, 235–240. [Google Scholar] [CrossRef]
- Marsh, E.R.; Yantek, D.S. Experimental Measurement of Precision Bearing Dynamic Stiffness. J. Sound Vib. 1997, 202, 55–66. [Google Scholar] [CrossRef]
- Zhang, Y.; Fang, B.; Kong, L.; Li, Y. Effect of the ring misalignment on the service characteristics of ball bearing and rotor system. Mech. Mach. Theory 2020, 151, 103889. [Google Scholar] [CrossRef]
- Xu, T.; Yang, L.; Wu, W.; Wang, K. Effect of angular misalignment of inner ring on the contact characteristics and stiffness coefficients of duplex angular contact ball bearings. Mech. Mach. Theory 2021, 157, 104178. [Google Scholar] [CrossRef]
- Zhang, X.; Han, Q.; Chu, F. Contact angle of ball bearings based on a simplified Jones-Harris method. J. Vib. Shock 2013, 170, 175. [Google Scholar]
















{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Parameter | Value |
|---|---|
| Db (mm) | 11.9 |
| fi (mm) | 0.52 |
| fo (mm) | 0.52 |
| Z | 20 |
| dm (mm) | 90.5 |
| α0 (°) | 15 |
| Eball (Mpa) ρball (kg·mm3) | 2.06 × 105 |
| 7.8 × 10−6 | |
| vball | 0.3 |
| Ering (Mpa) | 2.06 × 105 |
| vring | 0.3 |
| Preload | Extremely Light Preload (EL) | Light Preload (L) | Medium Preload (M) | Heavy Preload (H) |
|---|---|---|---|---|
| 0 μm/0° | 145 N | 290 N | 740 N | 1470 N |
| 10 μm/0.0052° | 145 N | 290 N | 740 N | 1470 N |
| 20 μm/0.0104° | 145 N | 290 N | 740 N | 1470 N |
| 30 μm/0.0156° | 145 N | 290 N | 740 N | 1470 N |
| 40 μm/0.0208° | 145 N | 290 N | 740 N | 1470 N |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2022 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Zhang, Y.; Li, Y.; Kong, L.; Yang, Z.; Si, Y. Research on the Mechanism of the Stiffness Performance of Rolling Bearings under Wrong Assembly State. Lubricants 2022, 10, 116. https://doi.org/10.3390/lubricants10060116
Zhang Y, Li Y, Kong L, Yang Z, Si Y. Research on the Mechanism of the Stiffness Performance of Rolling Bearings under Wrong Assembly State. Lubricants. 2022; 10(6):116. https://doi.org/10.3390/lubricants10060116
Chicago/Turabian StyleZhang, Yanfei, Yunhao Li, Lingfei Kong, Zhenchao Yang, and Yue Si. 2022. "Research on the Mechanism of the Stiffness Performance of Rolling Bearings under Wrong Assembly State" Lubricants 10, no. 6: 116. https://doi.org/10.3390/lubricants10060116
APA StyleZhang, Y., Li, Y., Kong, L., Yang, Z., & Si, Y. (2022). Research on the Mechanism of the Stiffness Performance of Rolling Bearings under Wrong Assembly State. Lubricants, 10(6), 116. https://doi.org/10.3390/lubricants10060116