Effect of Groove Structure on Lubrication Performance of Water-Lubricated Stern Tube Bearings


Abstract
:1. Introduction
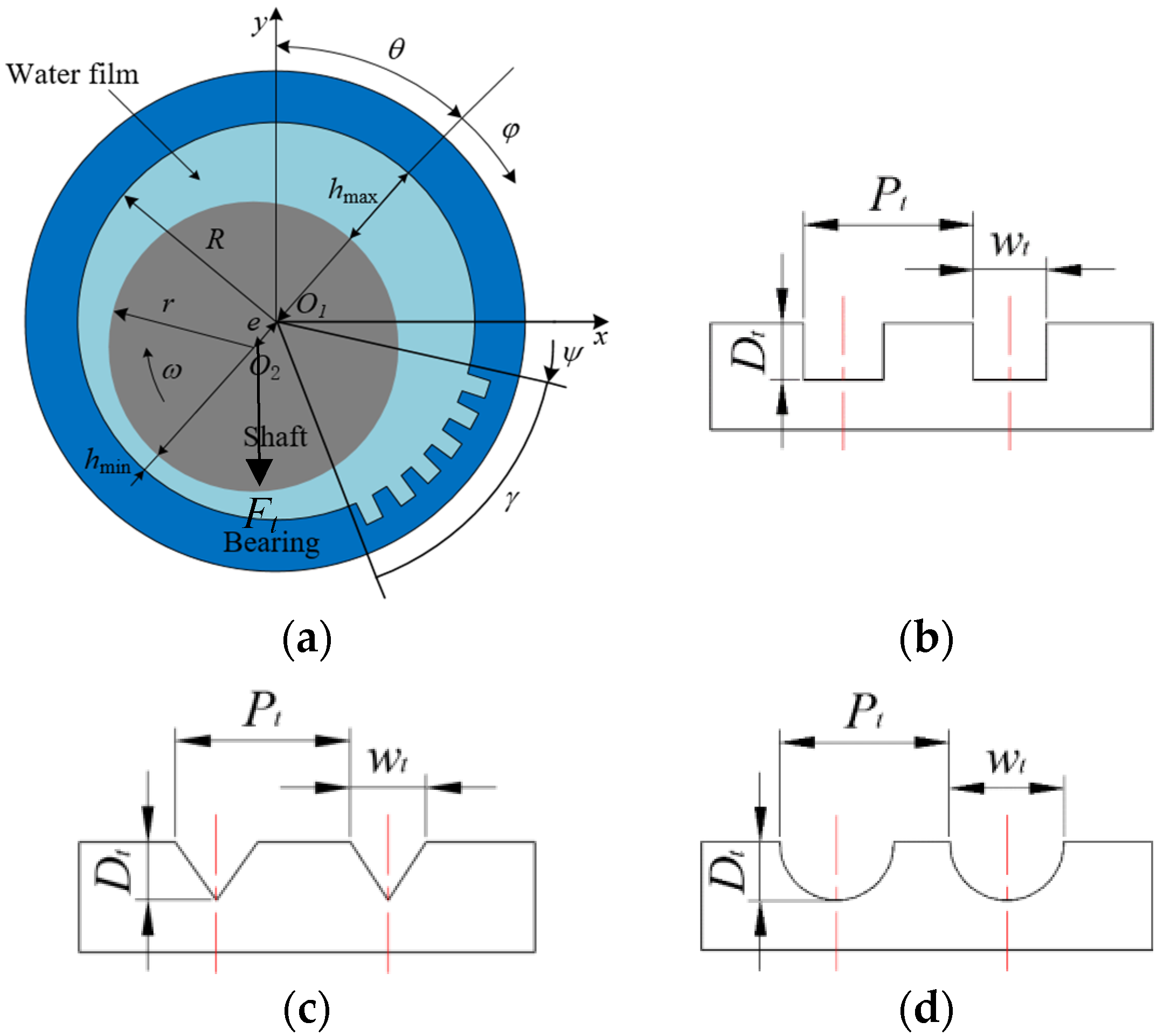
2. Mathematical Model
- (1)
- The inner diameter of the stern tube bearing, and the outer diameter of the shaft are much larger than the thickness of the water film.
- (2)
- There is no relative sliding between the water film and the inner wall of the stern tube bearing or the outer wall of the shaft.
- (3)
- Inertial forces and other volume forces of the water film are ignored.
- (4)
- Due to the extremely thin water film, small changes in water film pressure in the direction of the thickness are not considered.
- (5)
- Only the velocity gradient along the thickness direction of the water film is considered, and other directions are neglected.
- (6)
- Only the laminar flow of water is considered.
- (7)
- The variation of lubricant viscosity and density along the direction of water film thickness is not considered.
- (8)
- The working condition of the bearing is the metastability state; that is, the balance state of the bearing. The starting and stopping conditions are not considered.
- (9)
- The thermal effect of the shafting operation is ignored.
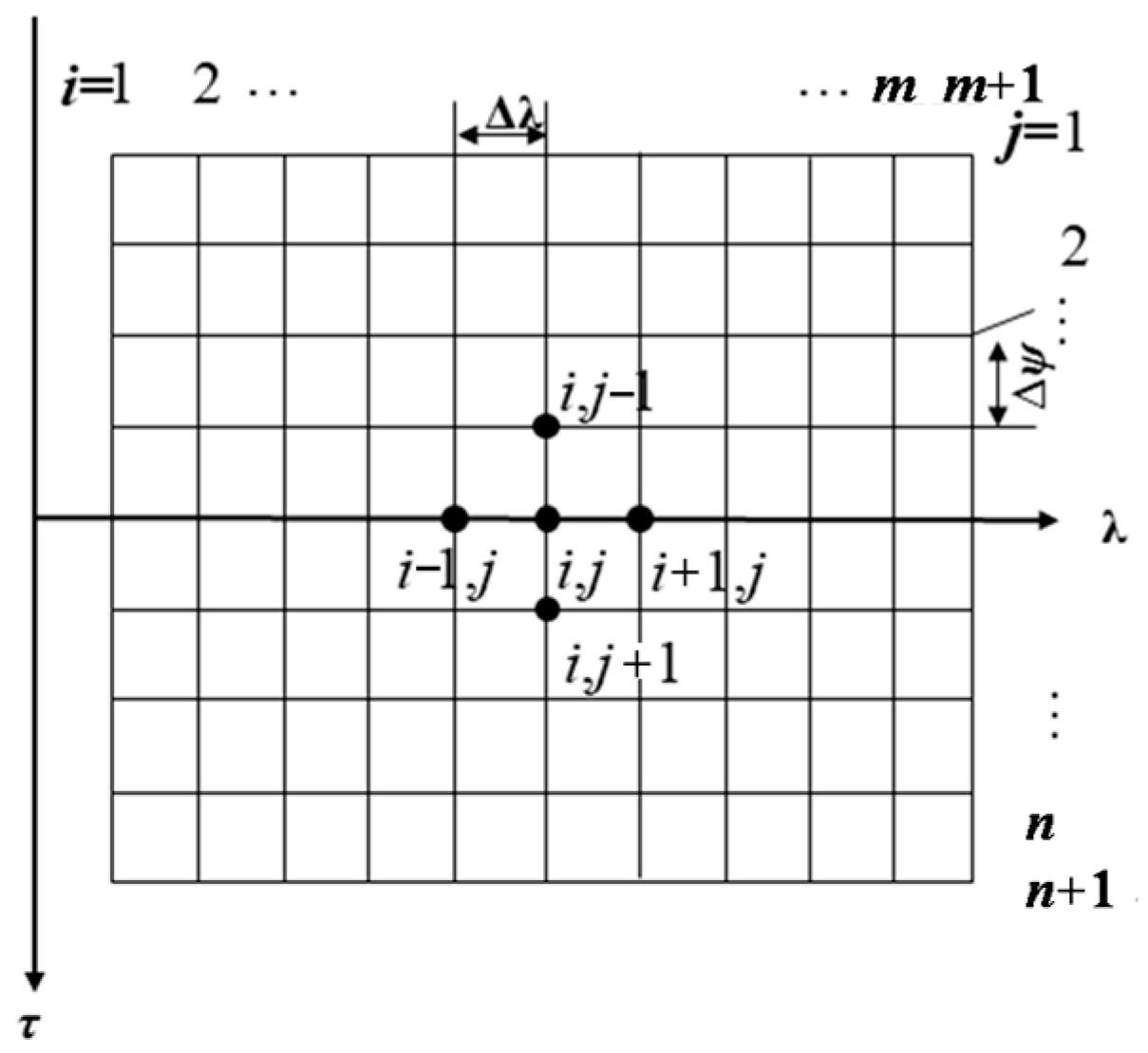
2.1. Discretization of the Reynolds Equation (7)
2.2. Discretization of Elastic Deformation Equation , in Equation (8)
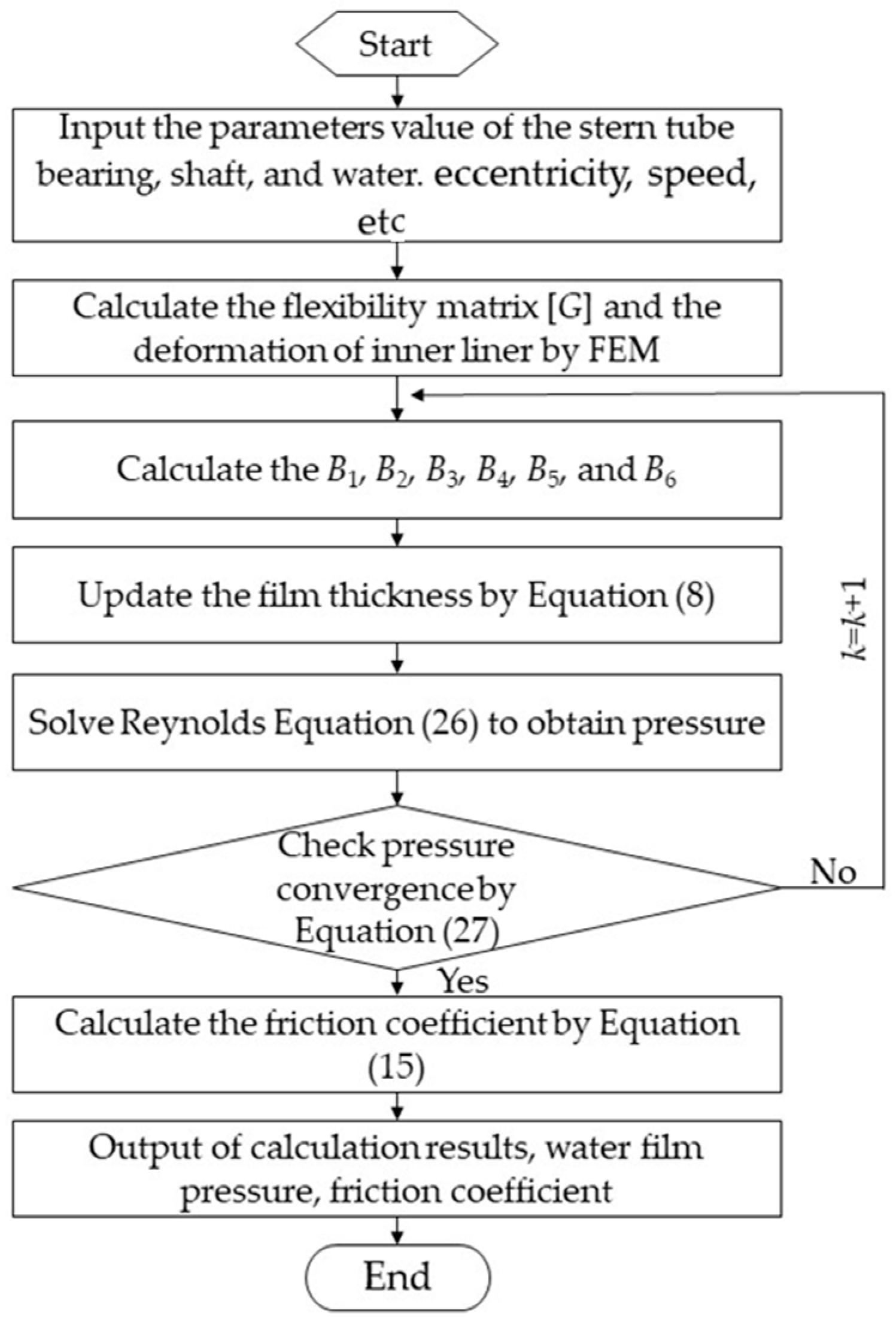
2.3. Ultra-Relaxation Iterative Method for Solving Pressure Distribution and Pressure Convergence Conditions
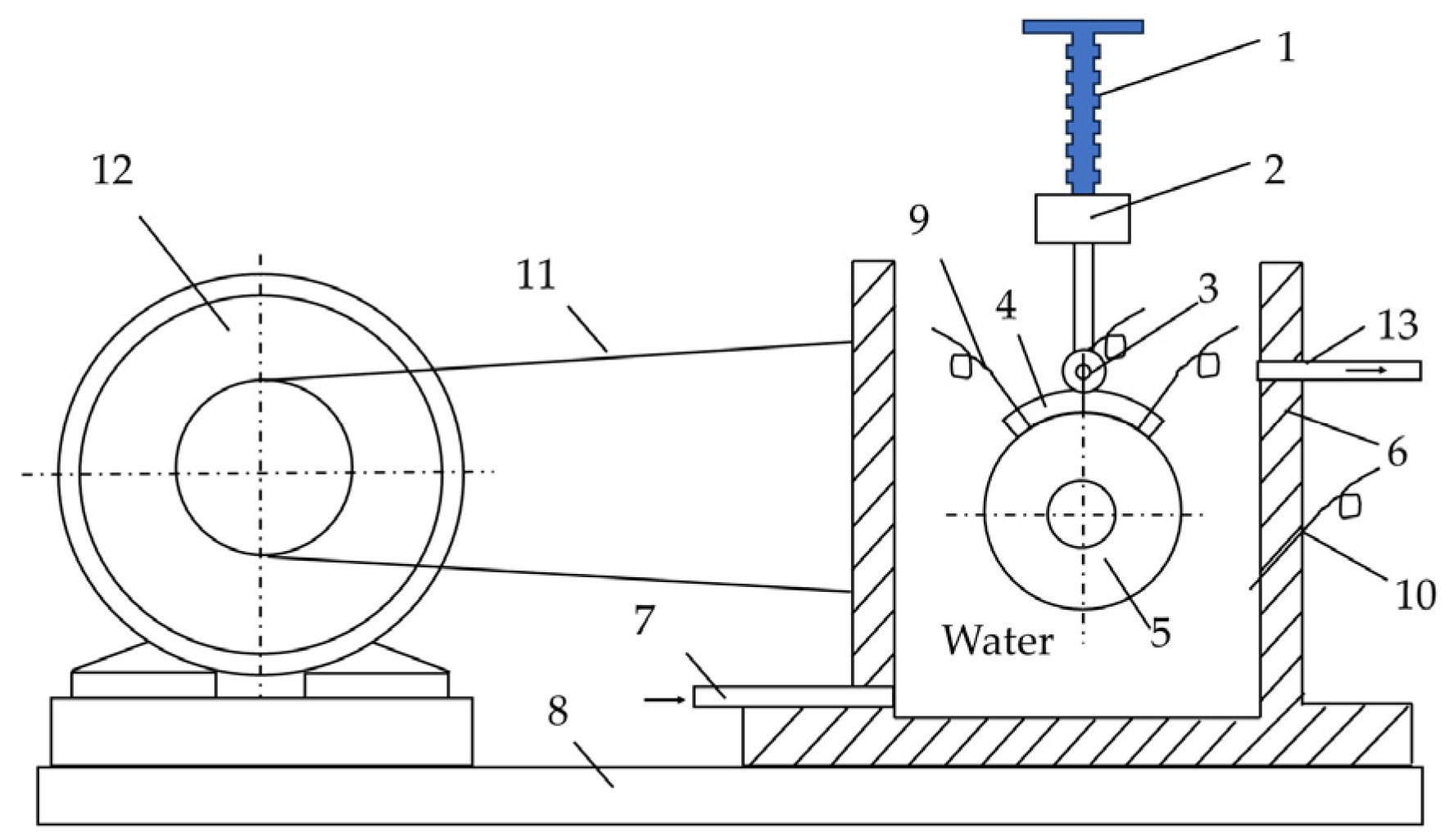
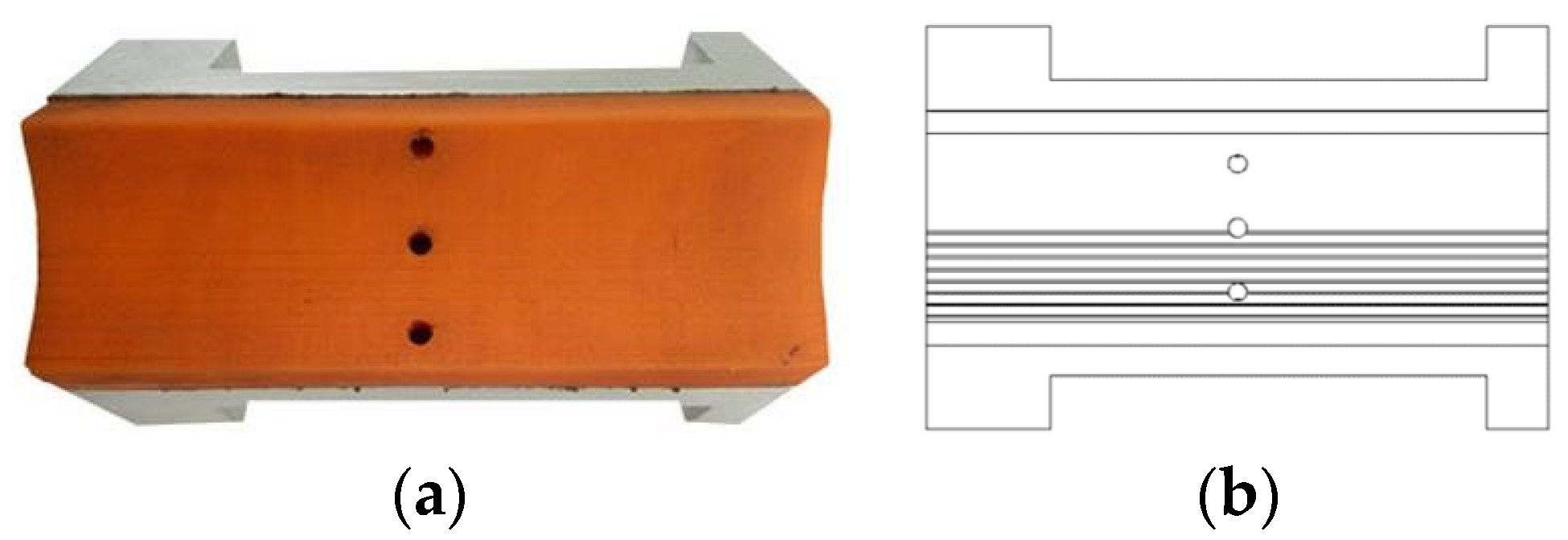
3. Experiment
4. Results and Discussion
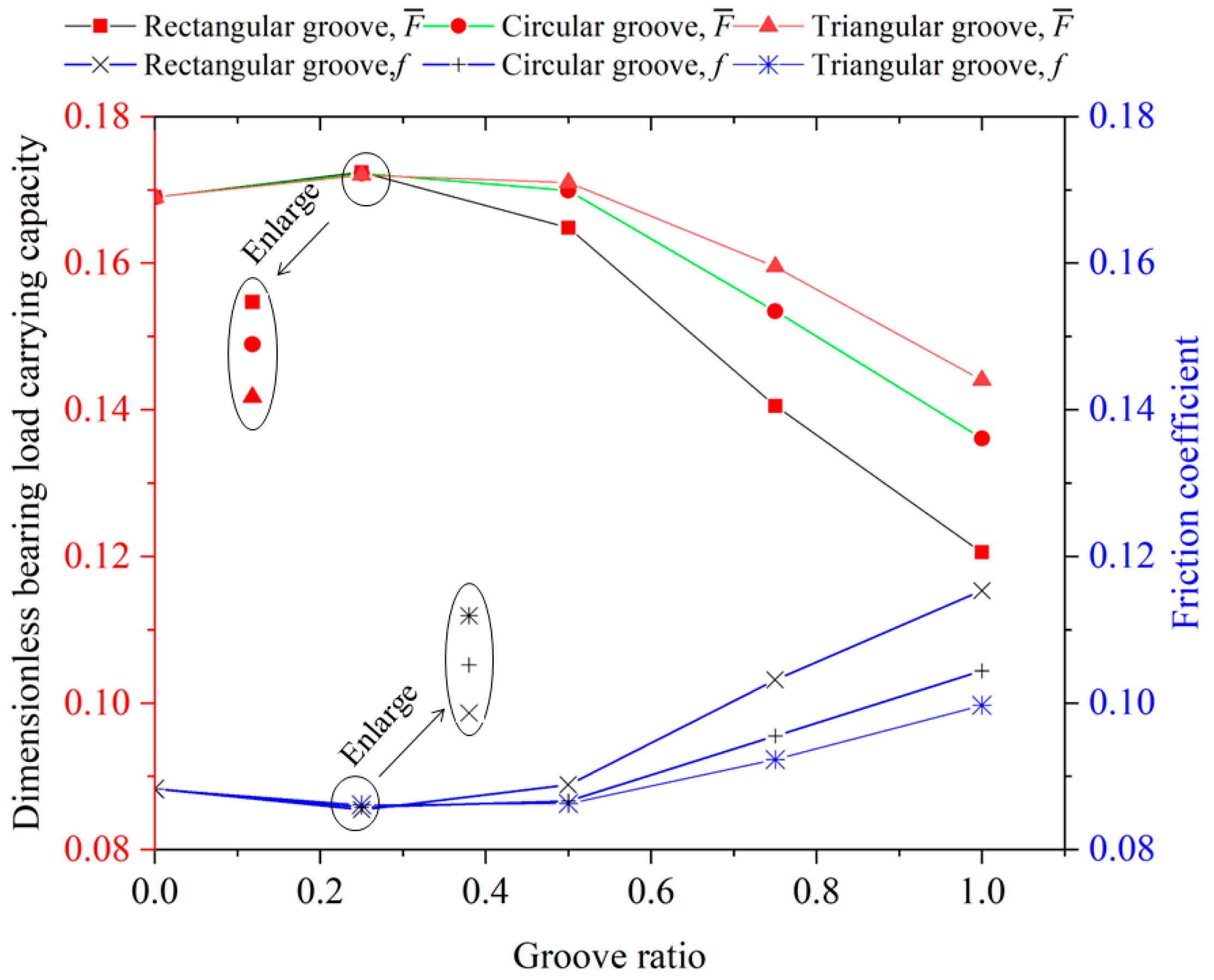
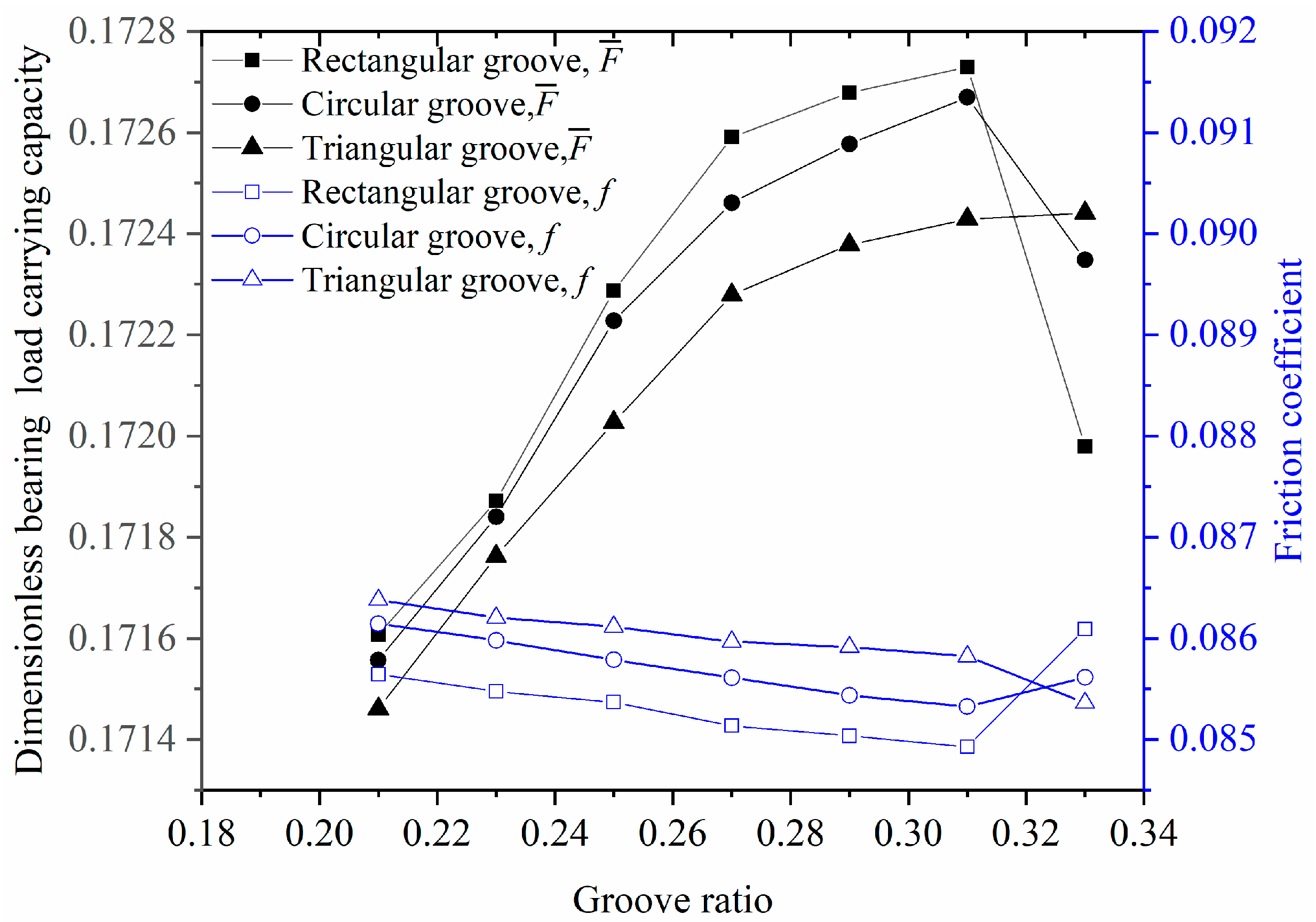
4.1. Effect of Groove Ratio
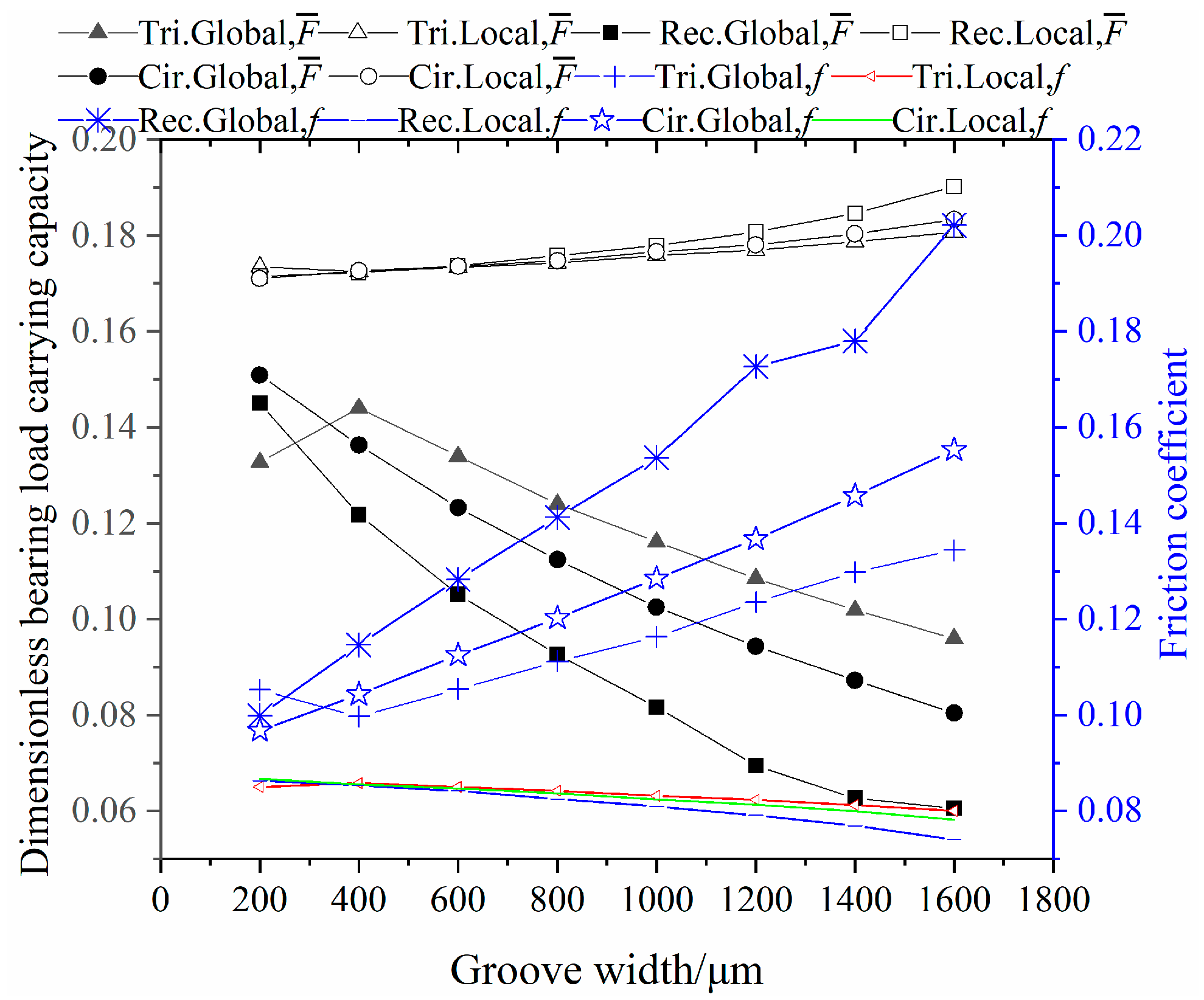
4.2. Effect of Groove Width
5. Conclusions
- (1)
- Reasonably arranging the groove ratio is beneficial for improving the lubrication effect of water-lubricated stern tube bearings. Rectangular groove stern tube bearings exhibit superior bearing load-carrying capacity and friction coefficient performance compared to circular and isosceles triangular micro-groove stern tube bearings when the groove ratio is between 0.30 and 0.32, resulting in the best lubrication performance. Isosceles triangular groove stern tube bearings exhibit better bearing load-carrying capacity and friction coefficient performance than the other two types when the groove ratio is above 0.31.
- (2)
- Increasing the width of the groove results in a significantly better lubrication effect of the local rectangular groove stern tube bearing compared to other stern bearings. The dimensionless bearing load-carrying capacity can be increased by 217%, and the friction coefficient can be reduced by 65%.
6. Further Research
Funding
Data Availability Statement
Acknowledgments
Conflicts of Interest
Nomenclature
| c | bearing radius clearance |
| Dt | depth of the micro-grooves |
| e | eccentricity distance |
| “elem” | the number of elements on the inner surface of the bearing |
| f | friction coefficient |
| F | combined force of the water film force |
| dimensionless bearing load-carrying capacity | |
| F1 | shear flow resistance |
| F2 | pressure flow resistance |
| Fc | vertical component of water film force |
| Fs | horizontal component of the water film force |
| Ft | radial load applied on the spindle |
| FT | total resistance |
| [G] | flexibility matrix |
| h | water film thickness |
| hb | water film thickness at the point of water film rupture |
| hmin | minimum film thickness |
| hmax | maximum film thickness |
| hs | thickness of the water film when ignoring the bearing deformation and groove |
| k | number of stress iterations |
| l | bearing length |
| “node” | the number of nodes on the inner surface of the bearing |
| O1 | centers of the bearing |
| O2 | centers of the shaft |
| p | water film pressure |
| Pt | span of the micro-grooves |
| {p} | average pressure of the inner surface elements of the bearing |
| r | radius of the shaft |
| R | inner radius of the bearing |
| Wt | width of the micro-grooves |
| β | super relaxation factor |
| γ | circumferential arrangement range of the micro-groove area |
| δ | radial deformation of the bearing inner surface nodes |
| {δ} | radial deformation of bearing inner surface nodes |
| ε | eccentricity ratio |
| ζ | pressure convergence accuracy |
| η | viscosity of the water |
| θ | attitude angle |
| θf | angular coordinate at the position of natural rupture of the water film |
| λ | axial direction coordinate of bearing |
| φ | circumferential coordinate starting from the maximum film thickness |
| ω | rotational speed of shaft |
References
- Prajapati, D.K.; Ramkumar, P. Surface topography effect on tribological performance of water-lubricated journal bearing under mixed-EHL regime. Surf. Topogr. Metrol. Prop. 2022, 10, 045022. [Google Scholar] [CrossRef]
- Chen, J.; Guo, Z.; Li, X.; Yuan, C. Development of gradient structural composite for improving tribological performance of PU material in water-lubricated bearings. Tribol. Int. 2022, 176, 107876. [Google Scholar] [CrossRef]
- Lv, F.; Jiao, C.; Xu, J. Theoretical and experimental investigation on effective length-to-diameter ratio of misaligned water-lubricated bearings. Tribol. Int. 2023, 187, 108712. [Google Scholar] [CrossRef]
- Xiang, G.; Wang, J.; Han, Y.; Yang, T.; Dai, H.; Yao, B.; Zhou, C.; Wang, L. Investigation on the nonlinear dynamic behaviors of water-lubricated bearings considering mixed thermoelastohydrodynamic performances. Mech. Syst. Signal Process. 2021, 169, 108627. [Google Scholar] [CrossRef]
- Hanawa, N.; Kuniyoshi, M.; Miyatake, M.; Yoshimoto, S. Static characteristics of a water-lubricated hydrostatic thrust bearing with a porous land region and a capillary restrictor. Precis. Eng. 2017, 50, 293–307. [Google Scholar] [CrossRef]
- Wu, Z.; Guo, Z.; Yuan, C. Insight into water lubrication performance of polyetheretherketone. J. Appl. Polym. Sci. 2020, 138, 49701. [Google Scholar] [CrossRef]
- Hamilton, D.B.; Walowit, J.A.; Allen, C.M. A Theory of Lubrication by Microirregularities. J. Basic Eng. 1966, 88, 177–185. [Google Scholar] [CrossRef]
- Etsion, I.; Burstein, L. A Model for Mechanical Seals with Regular Microsurface Structure. Tribol. Trans. 1996, 39, 677–683. [Google Scholar] [CrossRef]
- Tala-Ighil, N.; Fillon, M. A numerical investigation of both thermal and texturing surface effects on the journal bearings static characteristics. Tribol. Int. 2015, 90, 228–239. [Google Scholar] [CrossRef]
- Tala-Ighil, N.; Fillon, M.; Maspeyrot, P. Effect of textured area on the performances of a hydrodynamic journal bearing. Tribol. Int. 2011, 44, 211–219. [Google Scholar] [CrossRef]
- Choudhury, D.; Rebenda, D.; Sasaki, S.; Hekrle, P.; Vrbka, M.; Zou, M. Enhanced lubricant film formation through micro-dimpled hard-on-hard artificial hip joint: An in-situ observation of dimple shape effects. J. Mech. Behav. Biomed. Mater. 2018, 81, 120–129. [Google Scholar] [CrossRef]
- Shinde, A.; Pawar, P.; Shaikh, P.; Wangikar, S.; Salunkhe, S.; Dhamgaye, V. Experimental and numerical analysis of conical shape hydrodynamic journal bering with partial texturing. Procedia Manuf. 2018, 20, 300–310. [Google Scholar] [CrossRef]
- Dong, N.; Wang, Y.Q.; Liu, Q.; Huang, X.B. Influence of Micro-Morphology on Thermal Elatohydrodynamic Lubrication of Water-Lubricated Tenmat Bearing. Appl. Mech. Mater. 2015, 743, 85–90. [Google Scholar] [CrossRef]
- Wang, Y. Thermal Elastohydrodynamic Lubrication Property Analysis of Water-lubricated Tenmat Bearing Considering Debris and Surface Roughness. J. Mech. Eng. 2017, 53, 121–129. [Google Scholar] [CrossRef]
- He, Z.; Song, Q.; Liu, Q.; Xin, J.; Yang, C.; Liu, M.; Li, B.; Yan, F. Analysis of the effect of texturing parameters on the static characteristics of radial rigid bore aerodynamic journal bearings. Surf. Topogr. Metrol. Prop. 2022, 10, 035025. [Google Scholar] [CrossRef]
- Blatter, A.; Maillat, M.; Pimenov, S.; Shafeev, G.; Simakin, A.; Loubnin, E. Lubricated sliding performance of laser-patterned sapphire. Wear 1999, 232, 226–230. [Google Scholar] [CrossRef]
- Yuan, S.; Huang, W.; Wang, X. Orientation effects of micro-grooves on sliding surfaces. Tribol. Int. 2011, 44, 1047–1054. [Google Scholar] [CrossRef]
- A Wahab, J.; Ghazali, M.; Sajuri, Z.; Otsuka, Y.; Jayaprakash, M.; Nakamura, S.; Baharin, A. Effects of micro-grooves on tribological behaviour of plasma-sprayed alumina-13%titania coatings. Ceram. Int. 2017, 43, 6410–6416. [Google Scholar] [CrossRef]
- Ali, F.; Kaneta, M.; Křupka, I.; Hartl, M. Experimental and numerical investigation on the behavior of transverse limited micro-grooves in EHL point contacts. Tribol. Int. 2015, 84, 81–89. [Google Scholar] [CrossRef]
- Ehret, P.; Dowson, D.; Taylor, C. Waviness Orientation in EHL Point Contact. In Tribology Series; Elsevier: Amsterdam, The Netherlands, 1996; Volume 31, pp. 235–244. [Google Scholar] [CrossRef]
- Thakre, G.D.; Sharma, S.C.; Harsha, S.; Tyagi, M. A theoretical study of ionic liquid lubricated μ-EHL line contacts considering surface texture. Tribol. Int. 2016, 94, 39–51. [Google Scholar] [CrossRef]
- Kaneta, M.; Guo, F.; Wang, J.; Krupka, I.; Hartl, M. Formation of micro-grooves under impact loading in elliptical contacts with surface ridges. Tribol. Int. 2013, 65, 336–345. [Google Scholar] [CrossRef]
- Shi, X.; Ni, T. Effects of groove textures on fully lubricated sliding with cavitation. Tribol. Int. 2011, 44, 2022–2028. [Google Scholar] [CrossRef]
- Gong, J.; Jin, Y.; Liu, Z.; Jiang, H.; Xiao, M. Study on influencing factors of lubrication performance of water-lubricated micro-groove bearing. Tribol. Int. 2018, 129, 390–397. [Google Scholar] [CrossRef]
- Wu, Z.; Yuan, C.; Guo, Z.; Huang, Q. Effect of the groove parameters on the lubricating performance of the water-lubricated bearing under low speed. Wear 2023, 522, 204708. [Google Scholar] [CrossRef]
- Meng, F.; Chen, Y. Analysis of elasto-hydrodynamic lubrication of journal bearing based on different numerical methods. Ind. Lubr. Tribol. 2015, 67, 486–497. [Google Scholar] [CrossRef]
- Su, B.; Huang, L.; Huang, W.; Wang, X. The load carrying capacity of textured sliding bearings with elastic deformation. Tribol. Int. 2017, 109, 86–96. [Google Scholar] [CrossRef]
- Liu, S. On boundary conditions in lubrication with one dimensional analytical solutions. Tribol. Int. 2012, 48, 182–190. [Google Scholar] [CrossRef]
- Du, Y.; Li, M. Effects on lubrication characteristics of water-lubricated rubber bearings with journal tilting and surface roughness. Proc. Inst. Mech. Eng. Part J J. Eng. Tribol. 2019, 234, 161–171. [Google Scholar] [CrossRef]
- Xie, Z.; Liu, H. Experimental research on the interface lubrication regimes transition of water lubricated bearing. Mech. Syst. Signal Process. 2020, 136, 106522. [Google Scholar] [CrossRef]
- Chen, C.; Lin, G.; Hu, Z. An innovative and efficient solution for axisymmetric contact problem between structure and half-space. Eng. Anal. Bound. Elements 2022, 142, 10–27. [Google Scholar] [CrossRef]
- Liu, H.; Wu, B.; Li, Z. The generalized flexibility matrix method for structural damage detection with incomplete mode shape data. Inverse Probl. Sci. Eng. 2021, 29, 2019–2039. [Google Scholar] [CrossRef]
- Mukhopadhyay, M.; Sheikh, A.H. The Flexibility Matrix Method; Springer International Publishing: Cham, Switzerland, 2022; pp. 133–148. [Google Scholar] [CrossRef]
- Rekha, J.; Suma, S.P.; Shilpa, B.; Khan, U.; Hussain, S.M.; Zaib, A.; Galal, A.M. Solute transport exponentially varies with time in an unsaturated zone using finite element and finite difference method. Int. J. Mod. Phys. B 2022, 37, 2350089. [Google Scholar] [CrossRef]
- Liu, G.; Li, M. Lubrication Characteristics of Water-Lubricated Rubber Bearings Based on an Improved Algorithm of the Mass Conservation Boundary Condition. J. Tribol. 2022, 144, 081804. [Google Scholar] [CrossRef]
- Du, Y.; Quan, H. Characteristics of water-lubricated rubber bearings in mixed-flow lubrication state. Lubr. Sci. 2022, 34, 224–234. [Google Scholar] [CrossRef]
- Prajapati, D.K.; Katiyar, J.K.; Prakash, C. Determination of friction coefficient for water-lubricated journal bearing considering rough surface EHL contacts. Int. J. Interact. Des. Manuf. 2023, 1–9. [Google Scholar] [CrossRef]










{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Without Grooves | Local Grooves | |||||
|---|---|---|---|---|---|---|
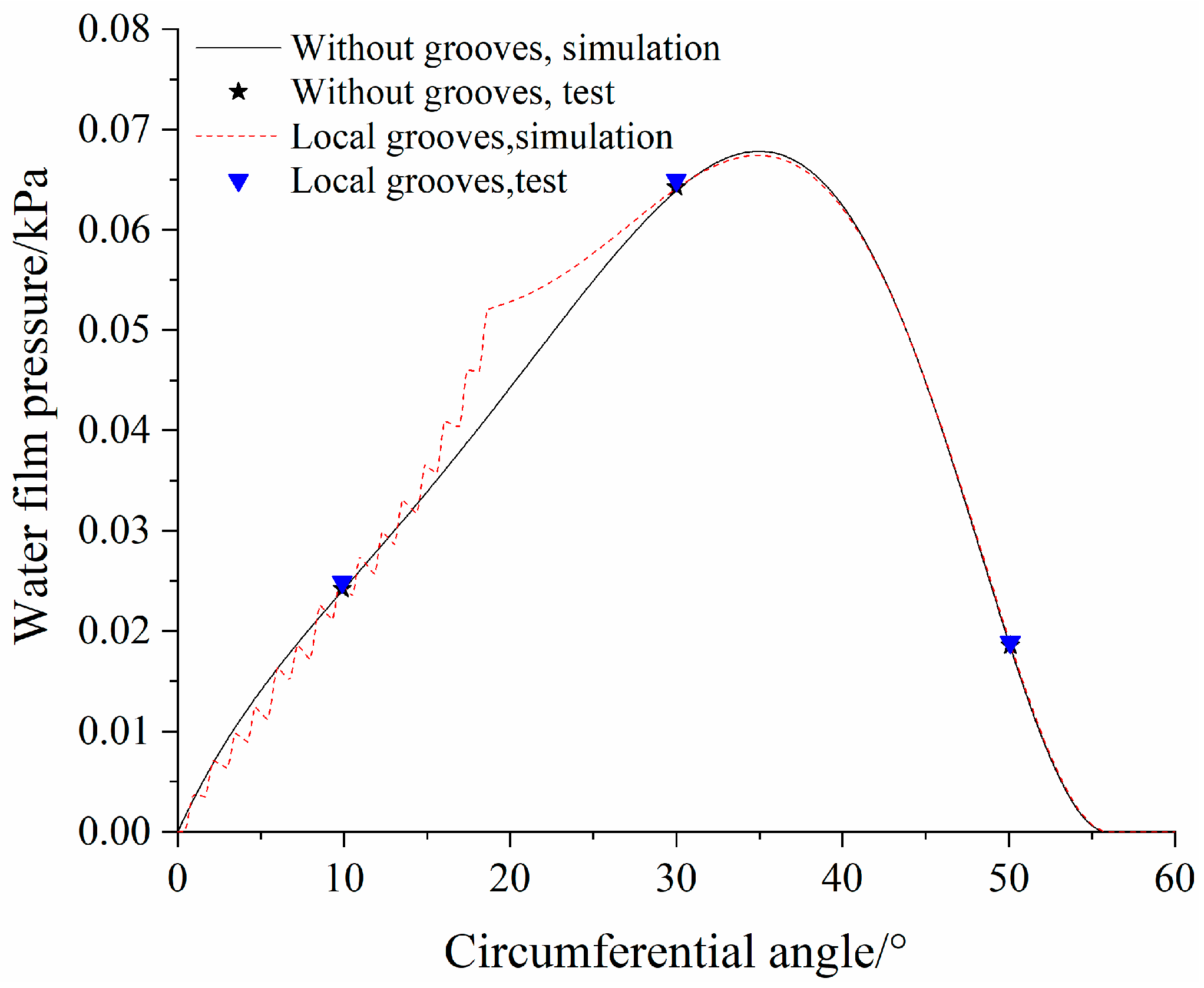
| Angle/° | Simulation/kPa | Test/kPa | Relative Error | Simulation/kPa | Test/kPa | Relative Error |
| 10 | 0.02401 | 0.02423 | 0.91% | 0.02466 | 0.02489 | 0.92% |
| 30 | 0.06388 | 0.06423 | 5.44% | 0.06411 | 0.06492 | 1.25% |
| 50 | 0.01839 | 0.01856 | 0.92% | 0.01872 | 0.01889 | 0.89% |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2023 by the author. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Zhang, S. Effect of Groove Structure on Lubrication Performance of Water-Lubricated Stern Tube Bearings. Lubricants 2023, 11, 374. https://doi.org/10.3390/lubricants11090374
Zhang S. Effect of Groove Structure on Lubrication Performance of Water-Lubricated Stern Tube Bearings. Lubricants. 2023; 11(9):374. https://doi.org/10.3390/lubricants11090374
Chicago/Turabian StyleZhang, Shengdong. 2023. "Effect of Groove Structure on Lubrication Performance of Water-Lubricated Stern Tube Bearings" Lubricants 11, no. 9: 374. https://doi.org/10.3390/lubricants11090374
APA StyleZhang, S. (2023). Effect of Groove Structure on Lubrication Performance of Water-Lubricated Stern Tube Bearings. Lubricants, 11(9), 374. https://doi.org/10.3390/lubricants11090374