Roughness-Induced Adhesive Hysteresis in Self-Affine Fractal Surfaces



{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
Abstract
:1. Introduction
2. Problem Statement
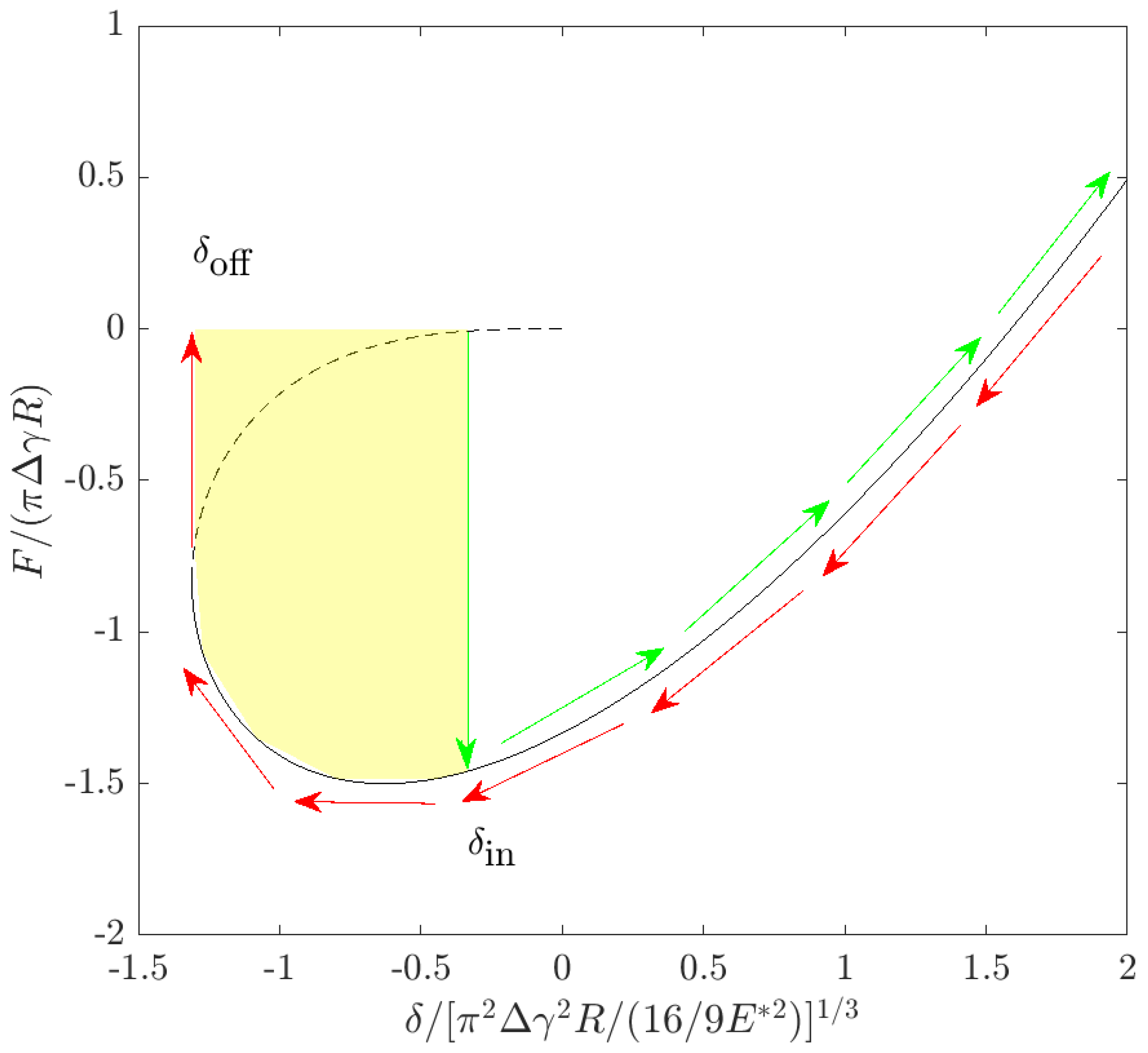
2.1. Adhesion Hysteresis of Smooth Elastic Spheres
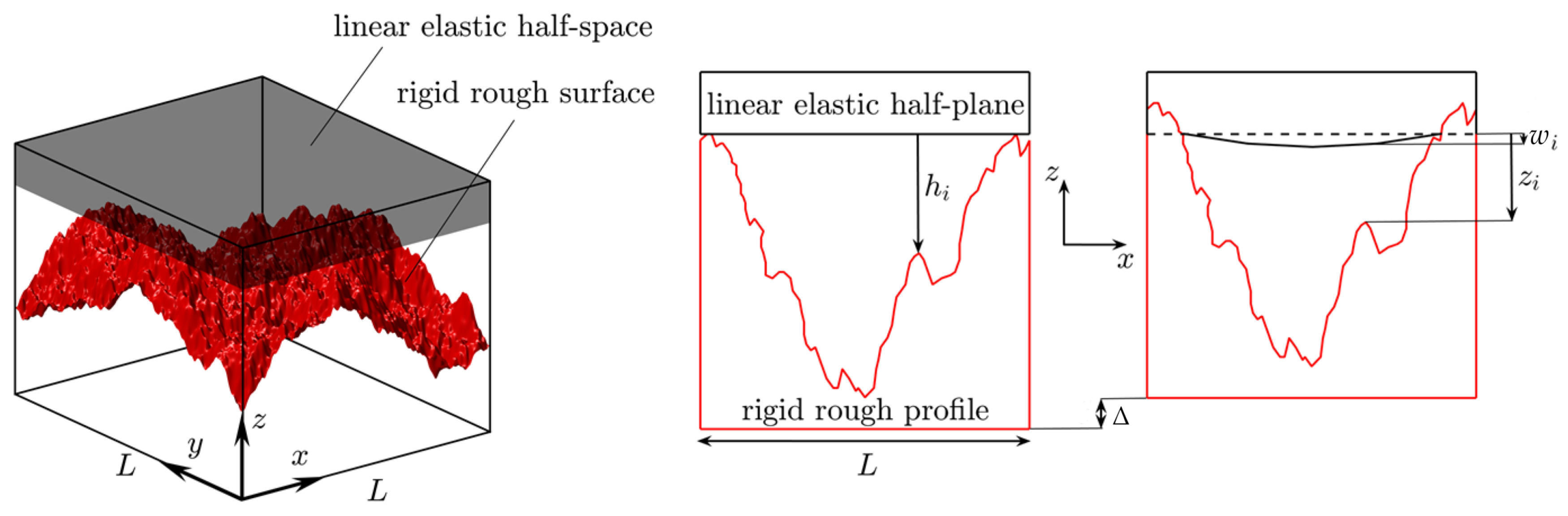
2.2. Adhesion Hysteresis of Rough Elastic Surfaces
3. Results
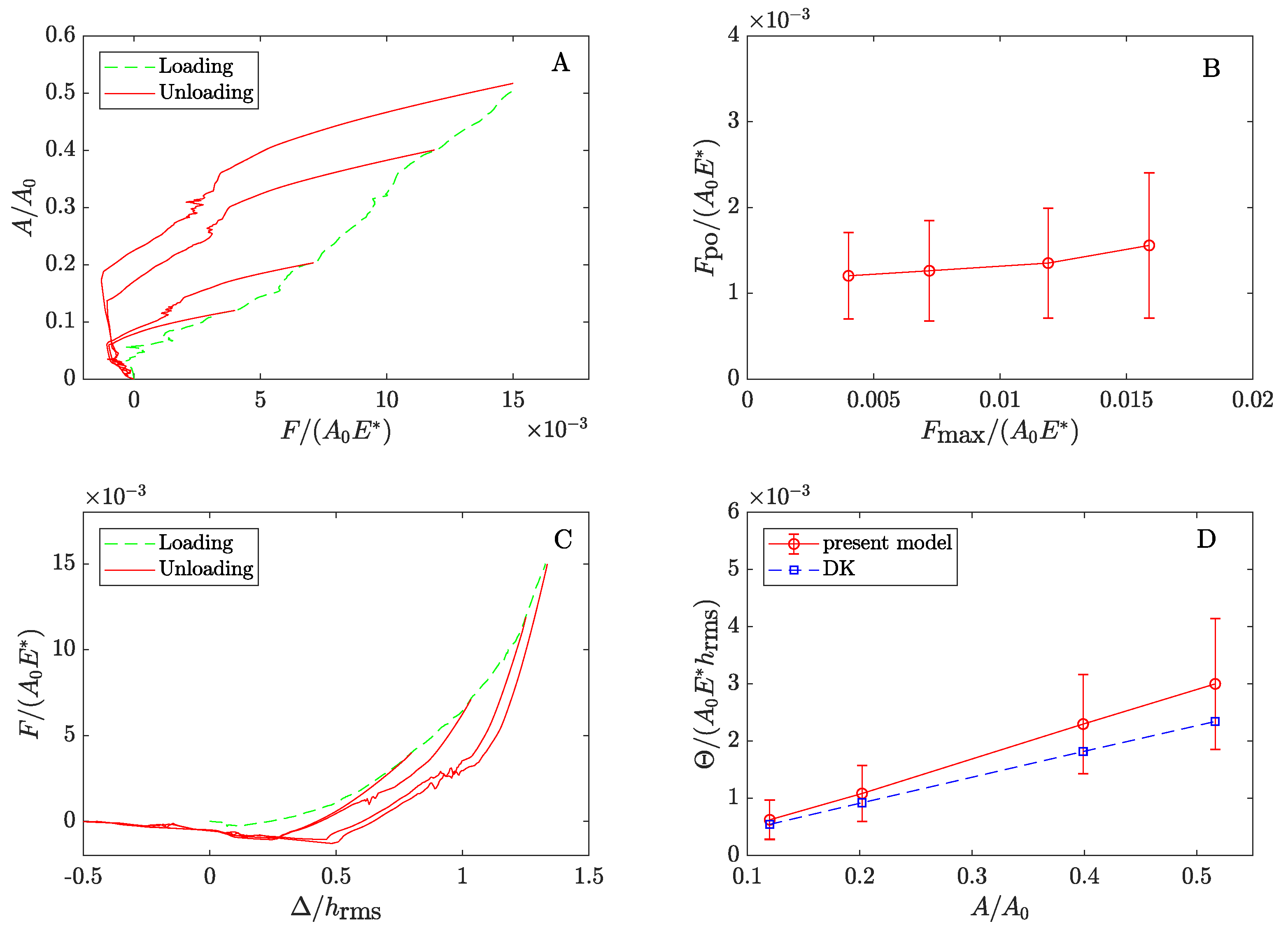
3.1. Adhesive Hysteresis and Pull-Off Force: Effect of Loading Parameters
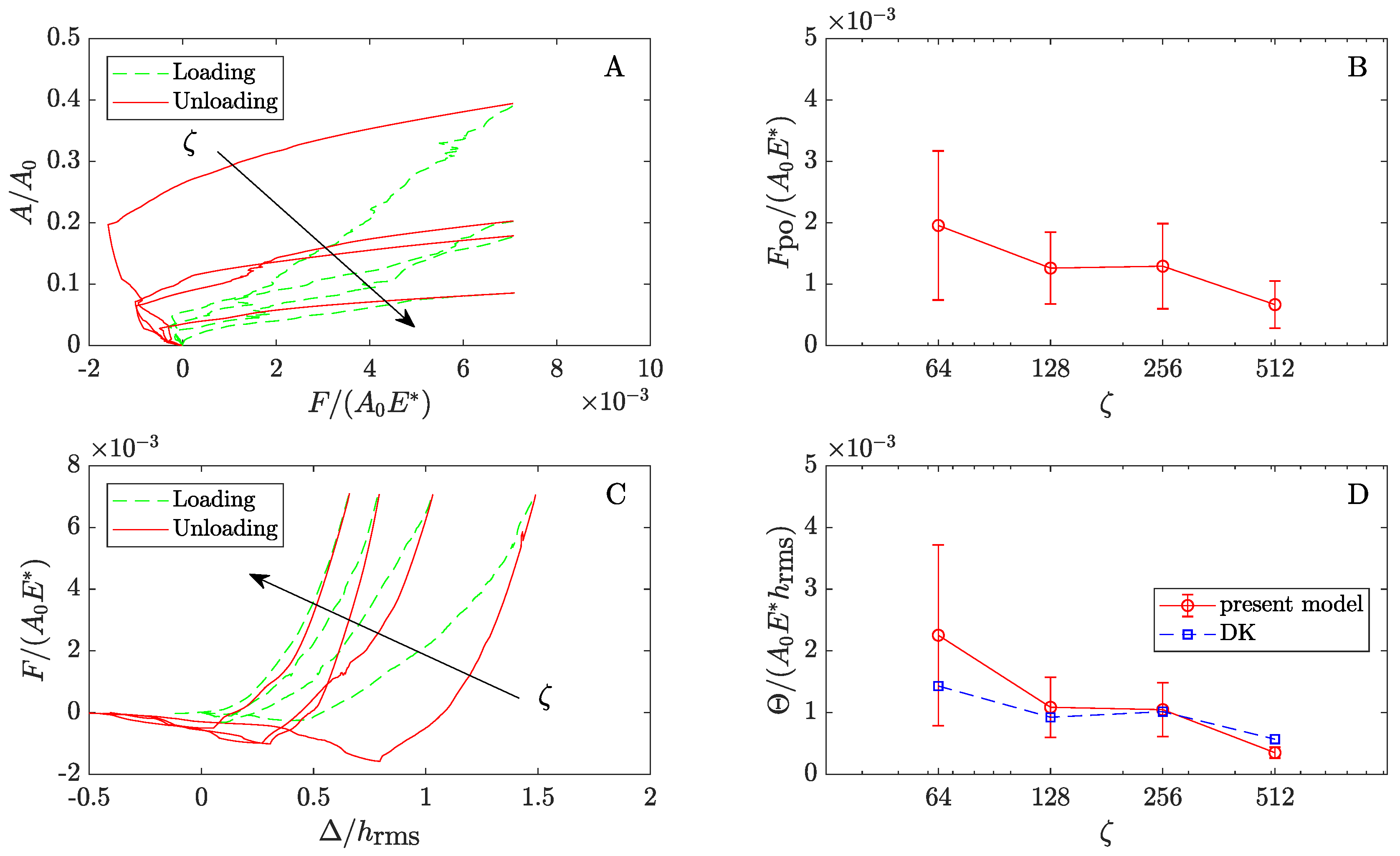
3.2. Adhesive Hysteresis and Pull-Off Force: Effect of the Fractal Parameters
4. Discussion and Conclusions
Author Contributions
Funding
Informed Consent Statement
Data Availability Statement
Acknowledgments
Conflicts of Interest
Appendix A. Deng and Kesari’s Model
References
- Tiwari, A.; Dorogin, L.; Bennett, A.I.; Schulze, K.D.; Sawyer, W.G.; Tahir, M.; Heinrich, G.; Persson, B.N.J. The effect of surface roughness and viscoelasticity on rubber adhesion. Soft Matter 2017, 13, 3602–3621. [Google Scholar] [CrossRef]
- Violano, G.; Afferrante, L. Adhesion of compliant spheres: An experimental investigation. Procedia Struct. Integr. 2019, 24, 251–258. [Google Scholar] [CrossRef]
- Kim, J.Y.; Baltazar, A.; Rokhlin, S.I. Ultrasonic assessment of rough surface contact between solids from elastoplastic loading–unloading hysteresis cycle. J. Mech. Phys. Solids 2004, 52, 1911–1934. [Google Scholar] [CrossRef]
- Guduru, P.R.; Bull, C. Detachment of a rigid solid from an elastic wavy surface: Experiments. J. Mech. Phys. Solids 2007, 55, 473–488. [Google Scholar] [CrossRef]
- Dalvi, S.; Gujrati, A.; Khanal, S.R.; Pastewka, L.; Dhinojwala, A.; Jacobs, T.D. Linking energy loss in soft adhesion to surface roughness. Proc. Natl. Acad. Sci. USA 2019, 116, 25484–25490. [Google Scholar] [CrossRef] [Green Version]
- Pinnaratip, R.; Bhuiyan, M.S.A.; Meyers, K.; Rajachar, R.M.; Lee, B.P. Multifunctional biomedical adhesives. Adv. Healthc. Mater. 2019, 8, 1801568. [Google Scholar] [CrossRef] [PubMed]
- Kinloch, A.J. Adhesion and Adhesives: Science and Technology; Springer Science & Business Media: New York, NY, USA, 2012. [Google Scholar]
- Fiorello, I.; Tricinci, O.; Naselli, G.A.; Mondini, A.; Filippeschi, C.; Tramacere, F.; Mazzolai, B. Climbing Plant-Inspired Micropatterned Devices for Reversible Attachment. Adv. Funct. Mater. 2020, 30, 2003380. [Google Scholar] [CrossRef]
- Lorenz, B.; Krick, B.A.; Mulakaluri, N.; Smolyakova, M.; Dieluweit, S.; Sawyer, W.G.; Persson, B.N.J. Adhesion: Role of bulk viscoelasticity and surface roughness. J. Phys. Condens. Matter 2013, 25, 225004. [Google Scholar] [CrossRef] [PubMed]
- Persson, B.N.J.; Tosatti, E. The effect of surface roughness on the adhesion of elastic solids. J. Chem. Phys. 2001, 115, 5597–5610. [Google Scholar] [CrossRef] [Green Version]
- Kesari, H.; Doll, J.C.; Pruitt, B.L.; Cai, W.; Lew, A.J. Role of surface roughness in hysteresis during adhesive elastic contact. Philos. Mag. Philos. Mag. Lett. 2010, 90, 891–902. [Google Scholar] [CrossRef] [Green Version]
- Deng, W.; Kesari, H. Molecular statics study of depth-dependent hysteresis in nano-scale adhesive elastic contacts. Model. Simul. Mater. Sci. Eng. 2017, 25, 055002. [Google Scholar] [CrossRef]
- Persson, B.N.J. Adhesion between elastic bodies with randomly rough surfaces. Phys. Rev. Lett. 2002, 89, 245502. [Google Scholar] [CrossRef] [PubMed]
- Deng, W.; Kesari, H. Depth-dependent hysteresis in adhesive elastic contacts at large surface roughness. Sci. Rep. 2019, 9, 1–12. [Google Scholar] [CrossRef] [Green Version]
- Carbone, G.; Pierro, E.; Recchia, G. Loading-unloading hysteresis loop of randomly rough adhesive contacts. Phys. Rev. E 2015, 92, 062404. [Google Scholar] [CrossRef] [Green Version]
- Wei, Z.; He, M.F.; Zhao, Y.P. The effects of roughness on adhesion hysteresis. J. Adhes. Sci. Technol. 2010, 24, 1045–1054. [Google Scholar] [CrossRef] [Green Version]
- Greenwood, J.A. Reflections on and extensions of the Fuller and Tabor theory of rough surface adhesion. Tribol. Lett. 2017, 65, 159. [Google Scholar] [CrossRef] [Green Version]
- Johnson, K.L.; Kendall, K.; Roberts, A. Surface energy and the contact of elastic solids. Proc. R. Soc. Lond. A Math. Phys. Sci. 1971, 324, 301–313. [Google Scholar]
- Ciavarella, M.; Delfine, V.; Demelio, G. A “re-vitalized” Greenwood and Williamson model of elastic contact between fractal surfaces. J. Mech. Phys. Solids 2006, 54, 2569–2591. [Google Scholar] [CrossRef]
- Afferrante, L.; Carbone, G.; Demelio, G. Interacting and coalescing Hertzian asperities: A new multiasperity contact model. Wear 2012, 278, 28–33. [Google Scholar] [CrossRef]
- Wu, J.J. The jump-to-contact distance in atomic force microscopy measurement. J. Adhes. 2010, 86, 1071–1085. [Google Scholar] [CrossRef]
- Tabor, D. Surface Forces and Surface Interactions. In Plenary and Invited Lectures; Academic Press: Cambridge, MA, USA, 1977; pp. 3–14. [Google Scholar]
- Ciavarella, M.; Greenwood, J.A.; Barber, J.R. Effect of Tabor parameter on hysteresis losses during adhesive contact. J. Mech. Phys. Solids 2017, 98, 236–244. [Google Scholar] [CrossRef]
- Violano, G.; Afferrante, L. Modeling the adhesive contact of rough soft media with an advanced asperity model. Tribol. Lett. 2019, 67, 119. [Google Scholar] [CrossRef] [Green Version]
- Putignano, C.; Afferrante, L.; Carbone, G.; Demelio, G. A new efficient numerical method for contact mechanics of rough surfaces. Int. J. Solids Struct. 2012, 49, 338–343. [Google Scholar] [CrossRef] [Green Version]
- Putignano, C.; Menga, N.; Afferrante, L.; Carbone, G. Viscoelasticity induces anisotropy in contacts of rough solids. J. Mech. Phys. Solids 2019, 129, 147–159. [Google Scholar] [CrossRef]
- Afferrante, L.; Bottiglione, F.; Putignano, C.; Persson, B.N.J.; Carbone, G.J.T.L. Elastic contact mechanics of randomly rough surfaces: An assessment of advanced asperity models and Persson’s theory. Tribol. Lett. 2018, 66, 75. [Google Scholar] [CrossRef]
- Putignano, C.; Afferrante, L.; Carbone, G.; Demelio, G. The influence of the statistical properties of self-affine surfaces in elastic contacts: A numerical investigation. J. Mech. Phys. Solids 2012, 60, 973–982. [Google Scholar] [CrossRef]
- Muser, M.H.; Dapp, W.B.; Bugnicourt, R.; Sainsot, P.; Lesaffre, N.; Lubrecht, T.A.; Persson, B.N.J.; Harris, K.; Bennett, A.; Schulze, K.; et al. Greenwood Meeting the contact-mechanics challenge. Tribol. Lett. 2017, 65, 118. [Google Scholar] [CrossRef] [Green Version]
- Salehani, M.K.; van Dokkum, J.S.; Irani, N.; Nicola, L. On the load-area relation in rough adhesive contacts. Tribol. Int. 2020, 144, 106099. [Google Scholar] [CrossRef]
- Violano, G.; Afferrante, L. Contact of rough surfaces: Modeling adhesion in advanced multiasperity models. Proc. Inst. Mech. Eng. Part J. Eng. Tribol. 2019, 233, 1585–1593. [Google Scholar] [CrossRef]
- Violano, G.; Afferrante, L. On DMT methods to calculate adhesion in rough contacts. Tribol. Int. 2019, 130, 36–42. [Google Scholar] [CrossRef]
- Krick, B.A.; Vail, J.R.; Persson, B.N.; Sawyer, W.G. Optical in situ micro tribometer for analysis of real contact area for contact mechanics, adhesion, and sliding experiments. Tribol. Lett. 2012, 45, 185–194. [Google Scholar] [CrossRef]
- Violano, G.; Demelio, G.; Afferrante, L. A note on the effect of surface topography on adhesion of hard elastic rough bodies with low surface energy. J. Mech. Behav. Mater. 2019, 28, 8–12. [Google Scholar] [CrossRef]
- Ghanbarzadeh, A.; Faraji, M.; Neville, A. Deterministic normal contact of rough surfaces with adhesion using a surface integral method. Proc. R. Soc. A 2020, 476, 20200281. [Google Scholar] [CrossRef]
- Persson, B.N.J.; Sivebæk, I.M.; Samoilov, V.N.; Zhao, K.; Volokitin, A.I.; Zhang, Z. On the origin of Amonton’s friction law. J. Phys. Condens. Matter 2008, 20, 395006. [Google Scholar] [CrossRef]
- Persson, B.N.; Scaraggi, M. Theory of adhesion: Role of surface roughness. J. Chem. Phys. 2014, 141, 124701. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Violano, G.; Afferrante, L.; Papangelo, A.; Ciavarella, M. On stickiness of multiscale randomly rough surfaces. J. Adhes. 2019, 1–19. [Google Scholar] [CrossRef] [Green Version]
- Tiwari, A.; Wang, J.; Persson, B.N.J. Adhesion paradox: Why adhesion is usually not observed for macroscopic solids. Phys. Rev. E 2020, 102, 042803. [Google Scholar] [CrossRef] [PubMed]
- Joe, J.; Thouless, M.D.; Barber, J.R. Effect of roughness on the adhesive tractions between contacting bodies. J. Mech. Phys. Solids 2018, 118, 365–373. [Google Scholar] [CrossRef]
- Joe, J.; Scaraggi, M.; Barber, J.R. Effect of fine-scale roughness on the tractions between contacting bodies. Tribol. Int. 2017, 111, 52–56. [Google Scholar] [CrossRef]
- Li, Q.; Pohrt, R.; Popov, V.L. Adhesive Strength of Contacts of Rough Spheres. Front. Mech. Eng. 2019, 5, 7. [Google Scholar] [CrossRef] [Green Version]
- Nayak, P.R. Random Process Model of Rough Surfaces. J. Lubr. Tech. 1971, 93, 398–407. [Google Scholar] [CrossRef]
- Maugis, D. Adhesion of spheres: The JKR-DMT transition using a Dugdale model. J. Colloid Interface Sci. 1992, 150, 243–269. [Google Scholar] [CrossRef]





Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2021 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Violano, G.; Afferrante, L. Roughness-Induced Adhesive Hysteresis in Self-Affine Fractal Surfaces. Lubricants 2021, 9, 7. https://doi.org/10.3390/lubricants9010007
Violano G, Afferrante L. Roughness-Induced Adhesive Hysteresis in Self-Affine Fractal Surfaces. Lubricants. 2021; 9(1):7. https://doi.org/10.3390/lubricants9010007
Chicago/Turabian StyleViolano, Guido, and Luciano Afferrante. 2021. "Roughness-Induced Adhesive Hysteresis in Self-Affine Fractal Surfaces" Lubricants 9, no. 1: 7. https://doi.org/10.3390/lubricants9010007
APA StyleViolano, G., & Afferrante, L. (2021). Roughness-Induced Adhesive Hysteresis in Self-Affine Fractal Surfaces. Lubricants, 9(1), 7. https://doi.org/10.3390/lubricants9010007