Towards Ecological Alternatives in Bearing Lubrication


Abstract
:1. Introduction
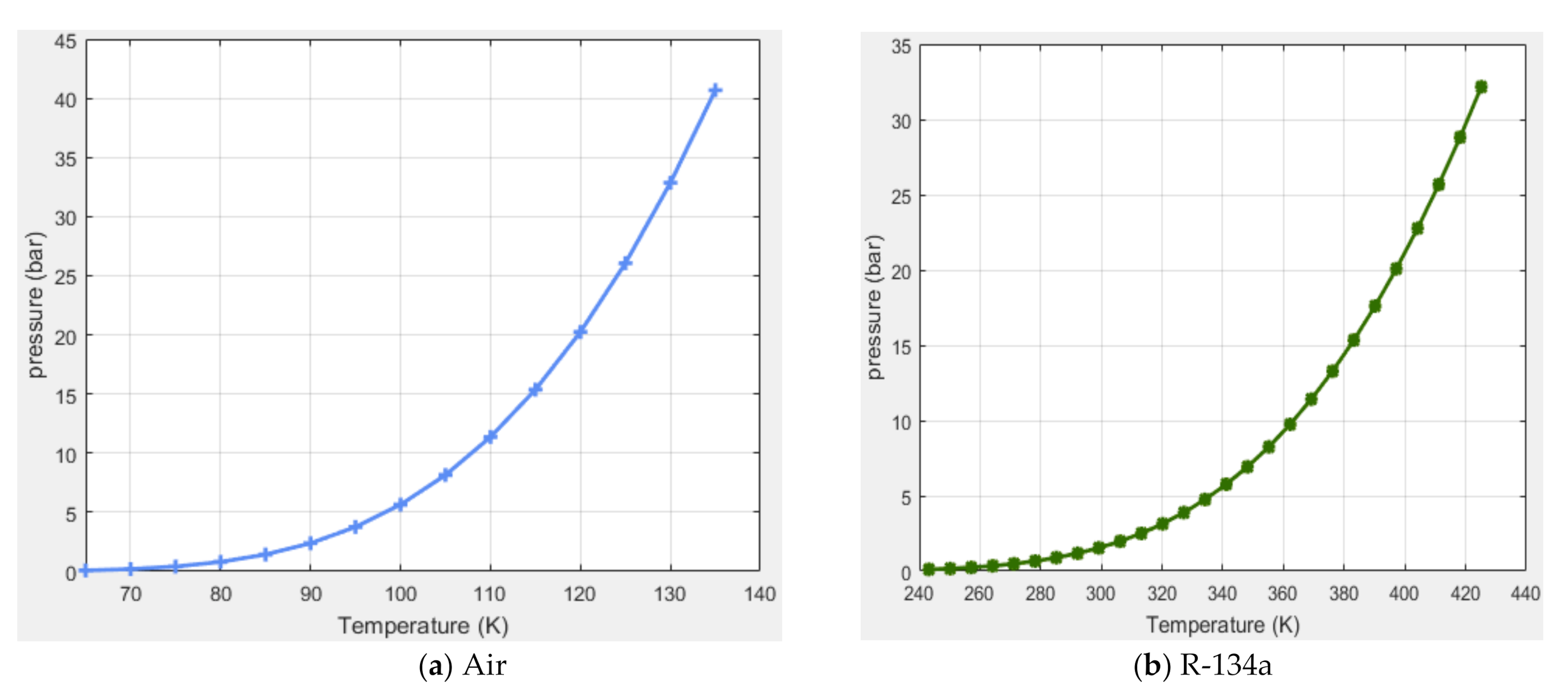
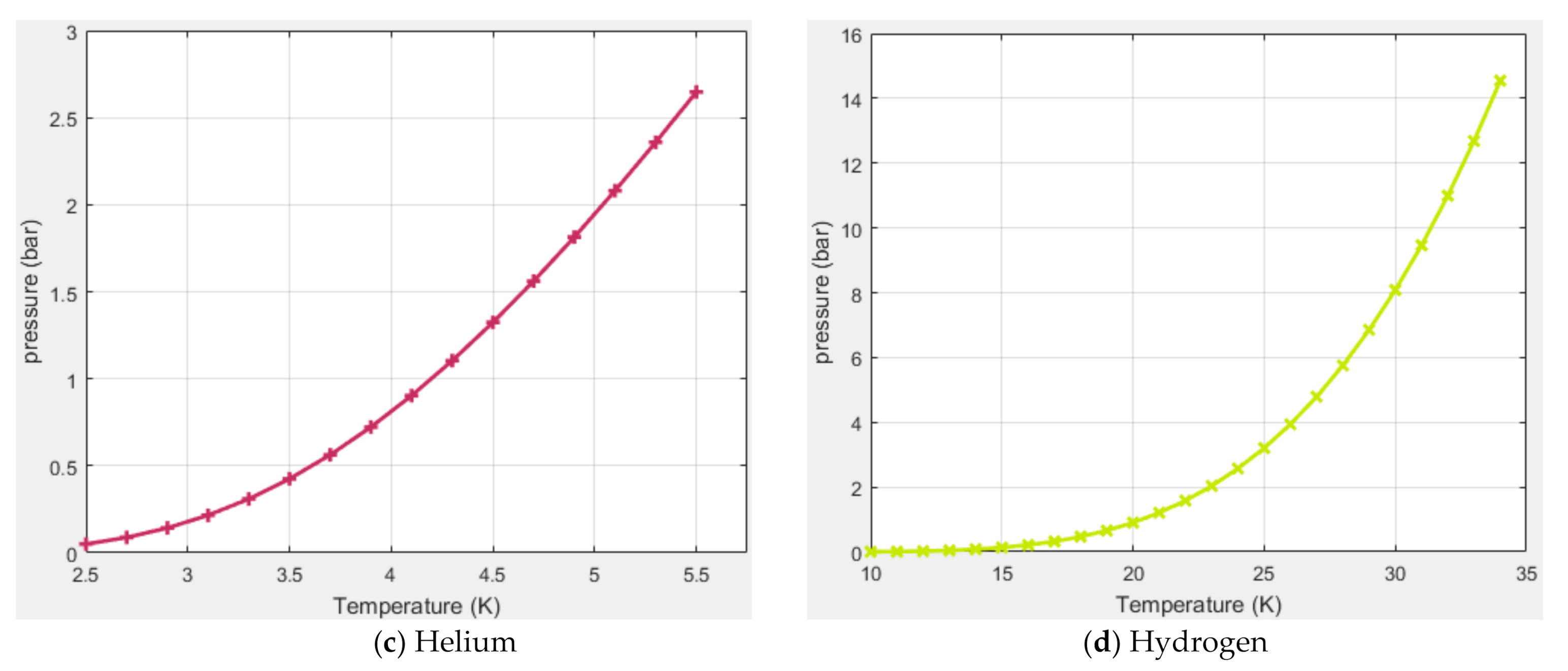
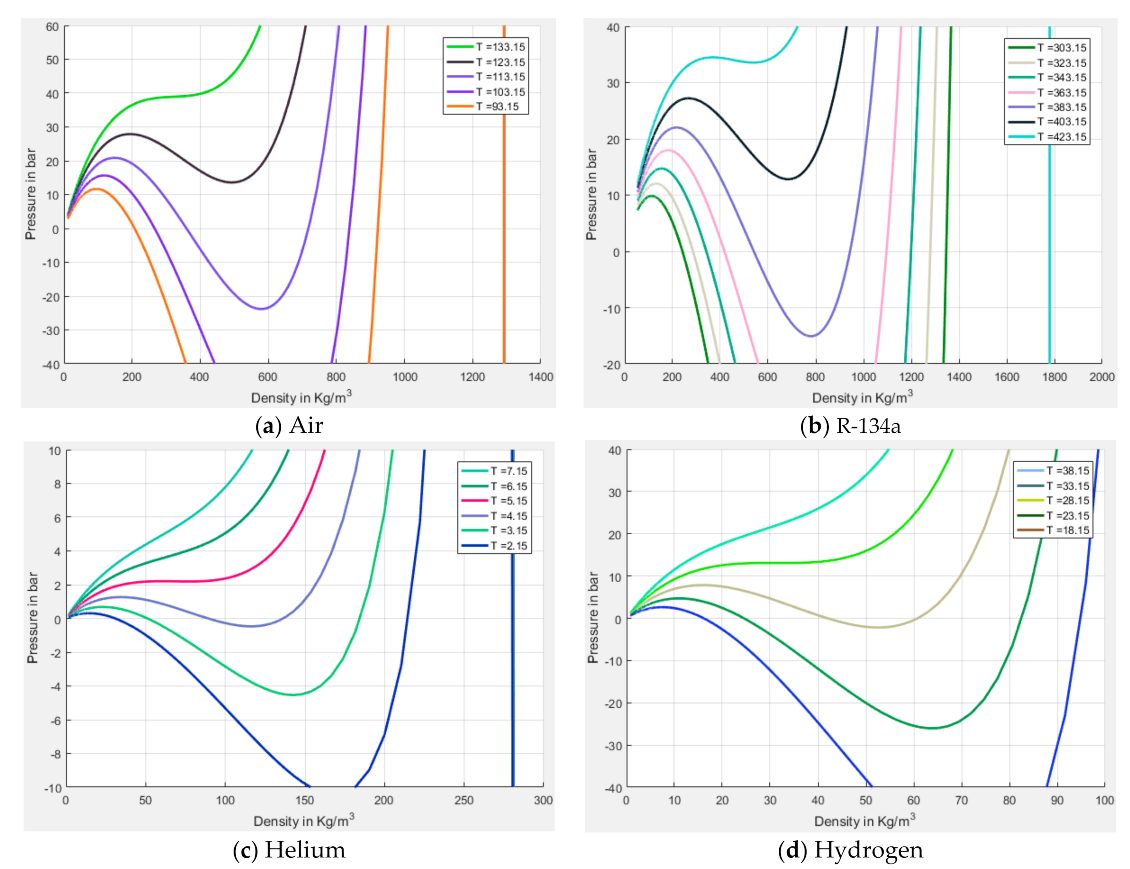
2. Equation of State and Vapor/Liquid Transition
3. The Vapor/Liquid Transition Phase
4. Generalized Reynolds Equation
5. Energy Equation
6. Three-Dimensional Eddy Viscosity Model
7. Turbulent Conduction
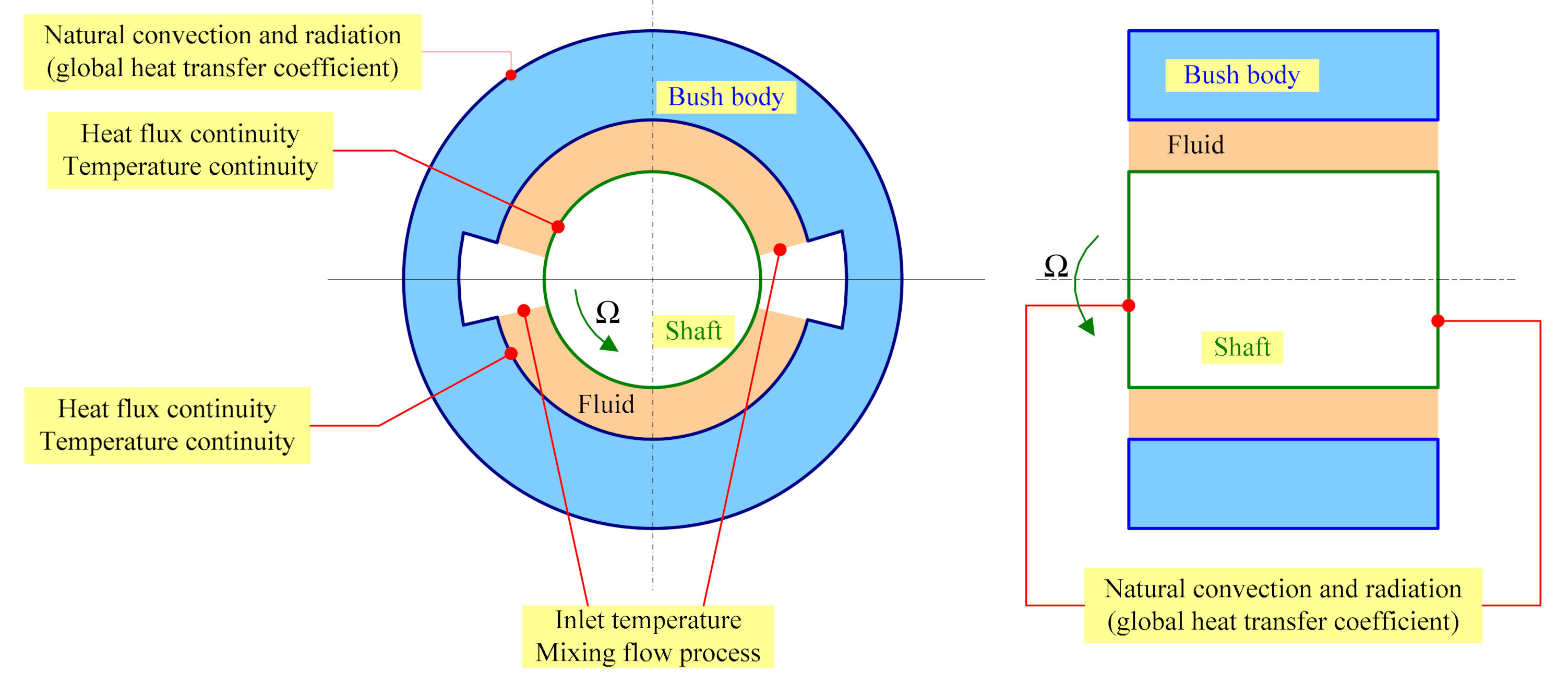
8. Thermal Behavior of the Solids
8.1. Film–Housing Interface
8.2. Housing–Air Interface
8.3. Film–Shaft Interface
8.4. Shaft–Air Interface
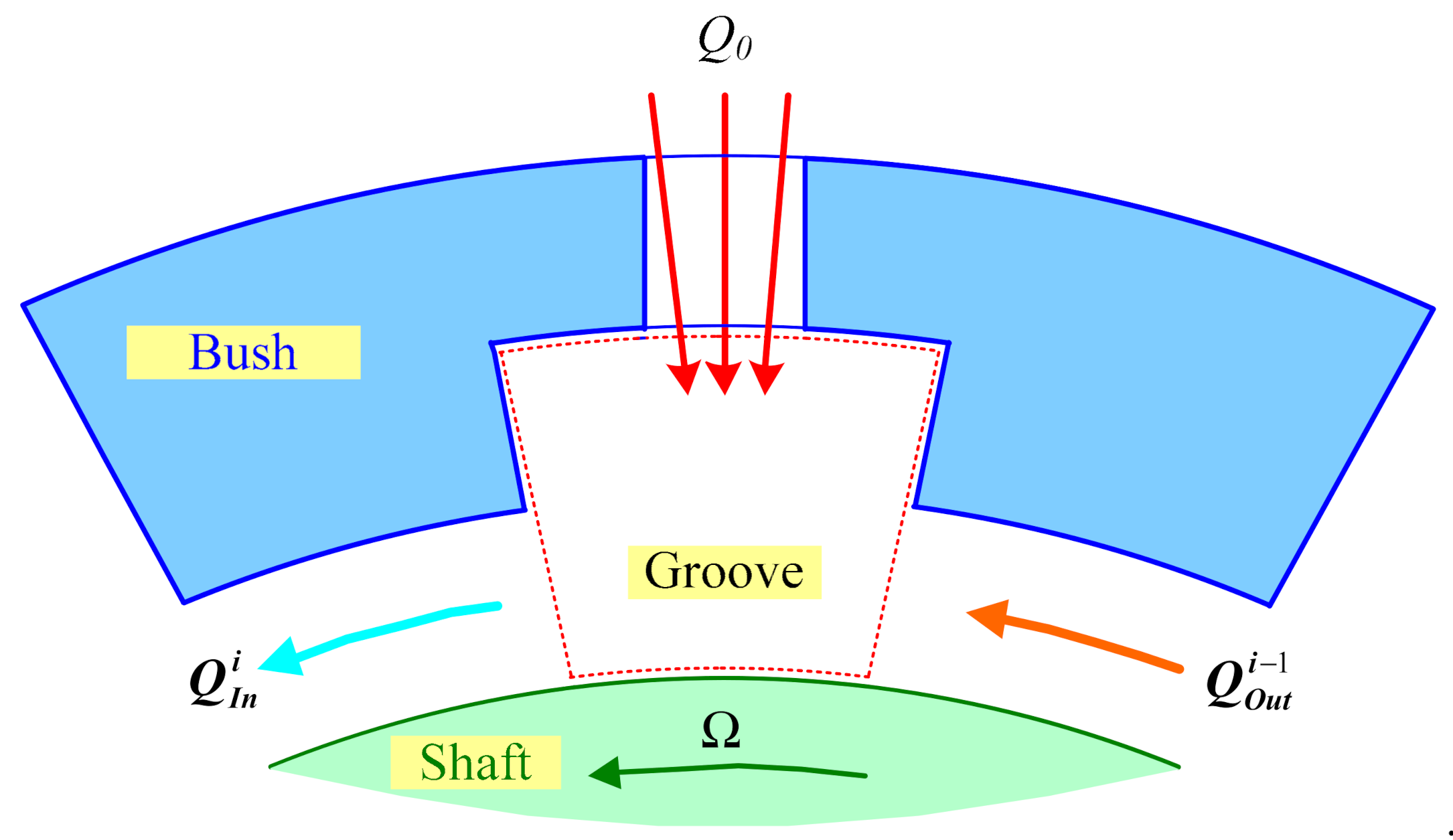
8.5. At the Entry of the Film
9. Viscosity Variations
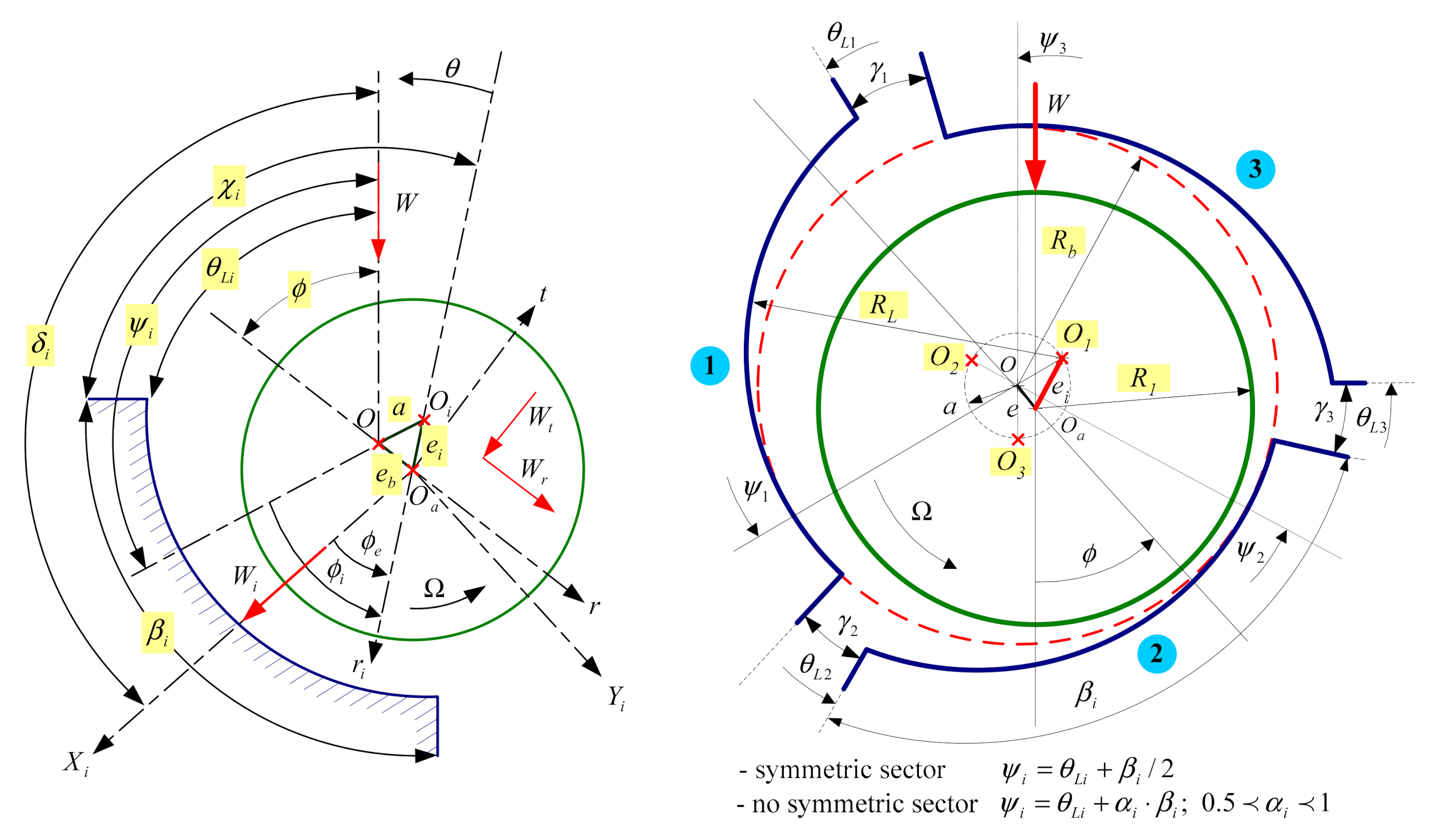
10. Bearing Geometry
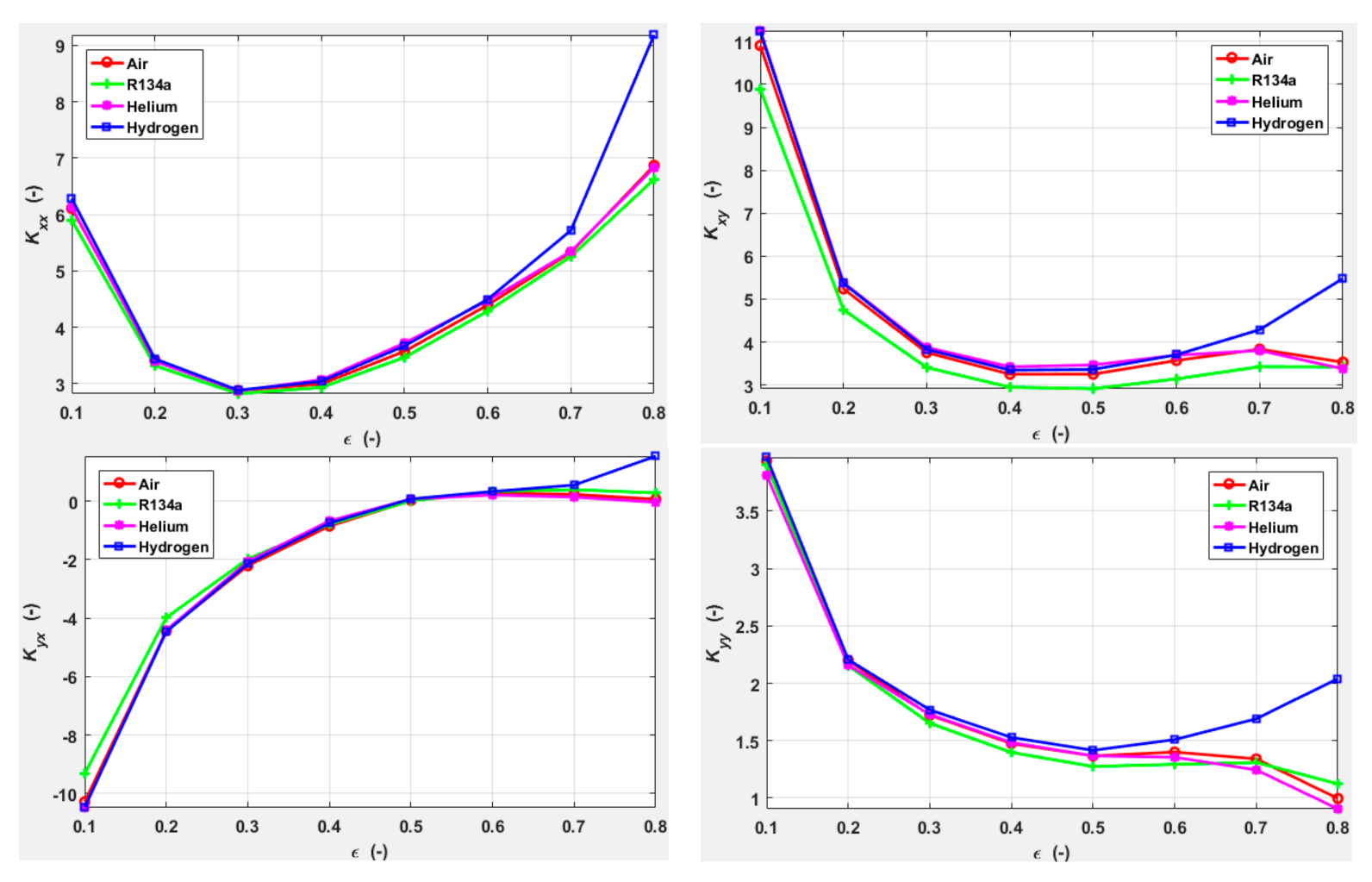
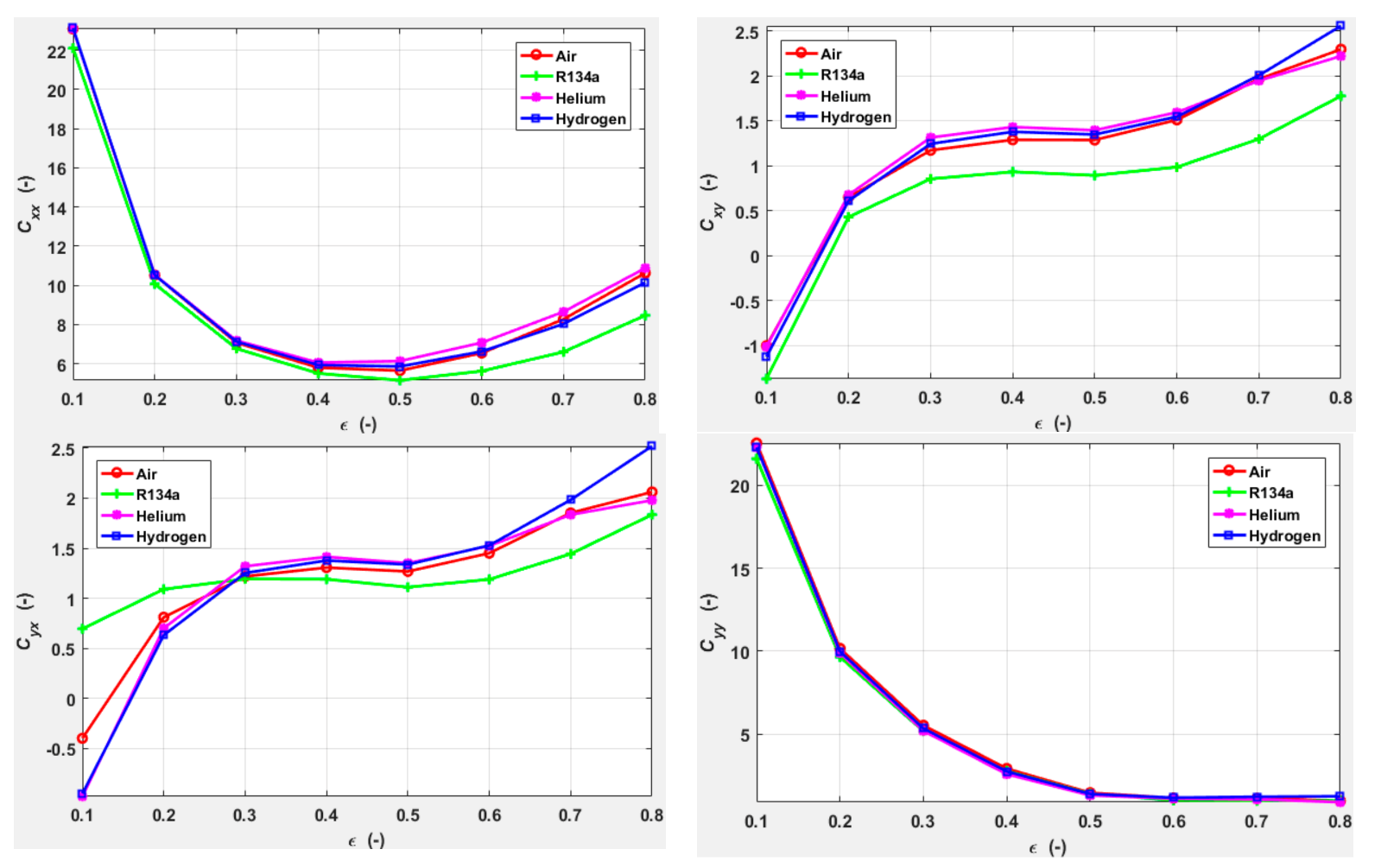
11. Dynamic Coefficients
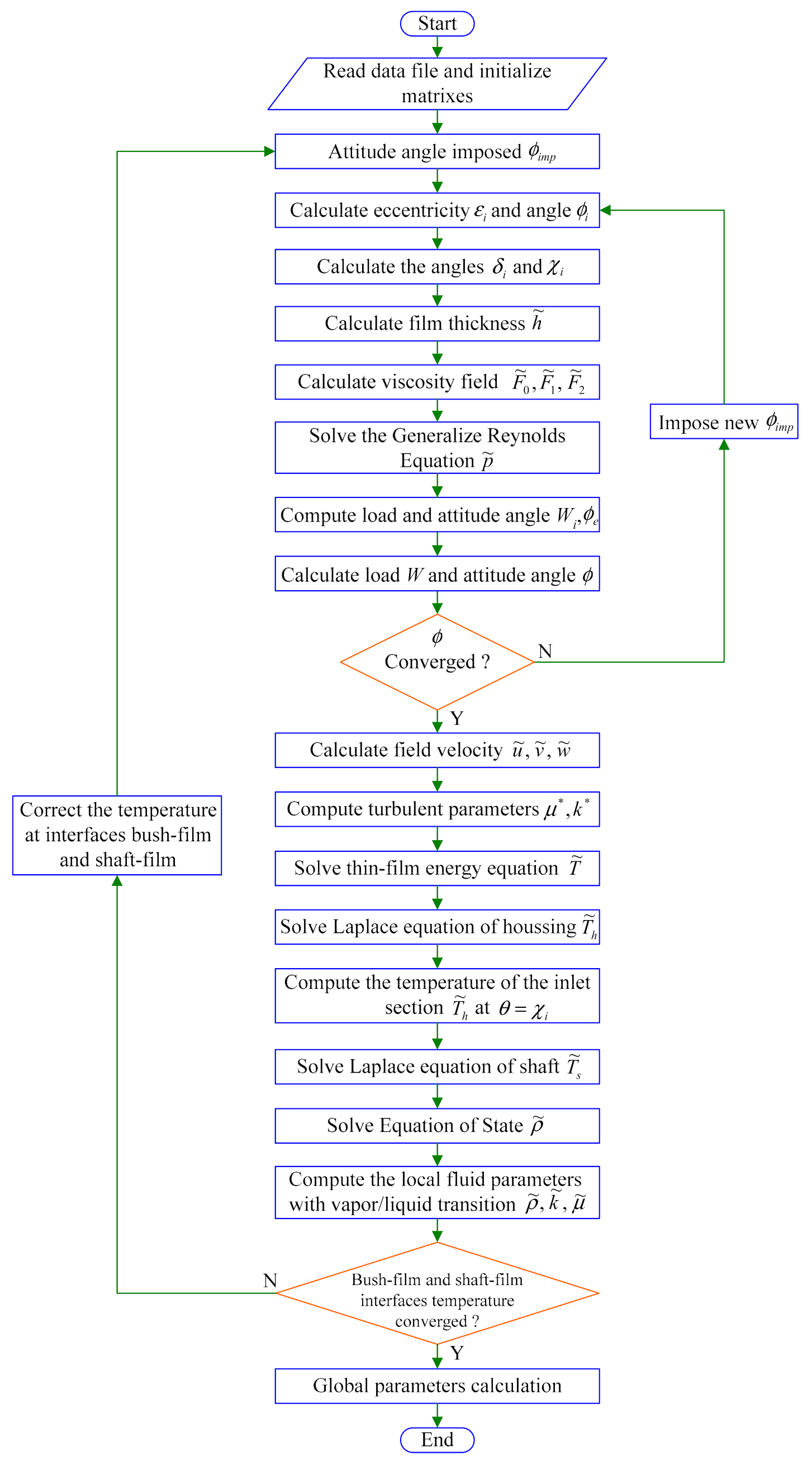
12. Finite Difference Method
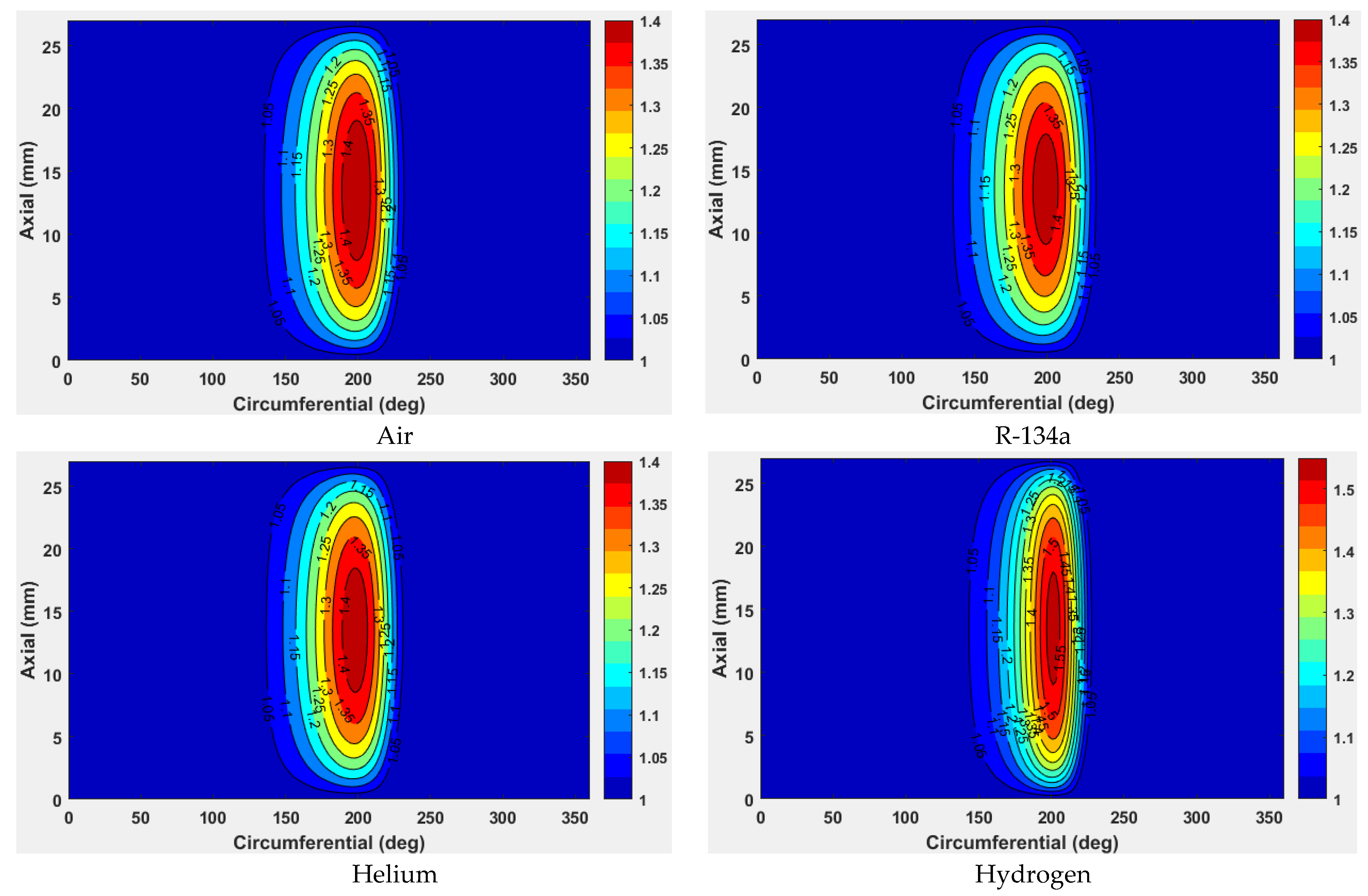
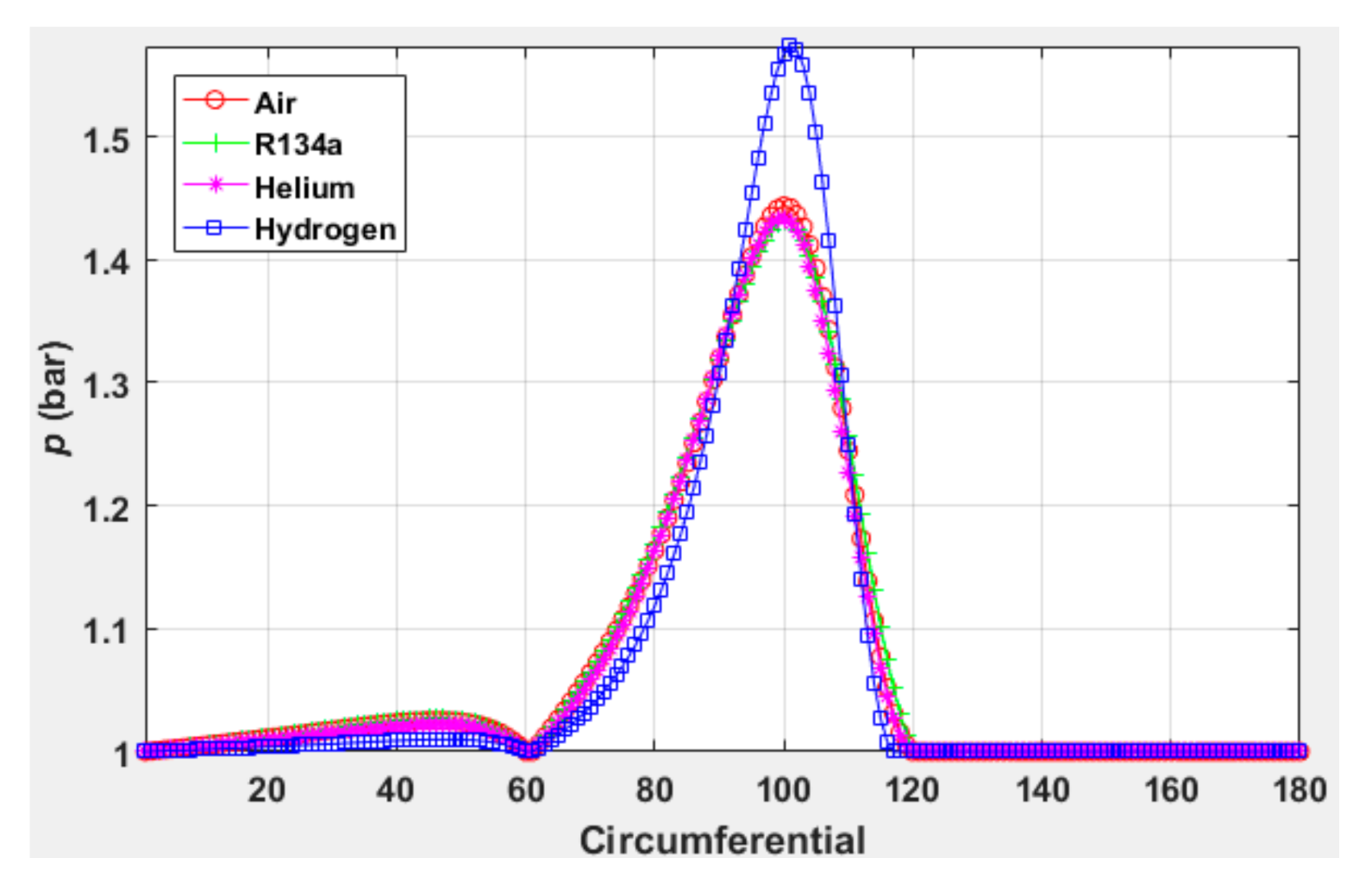
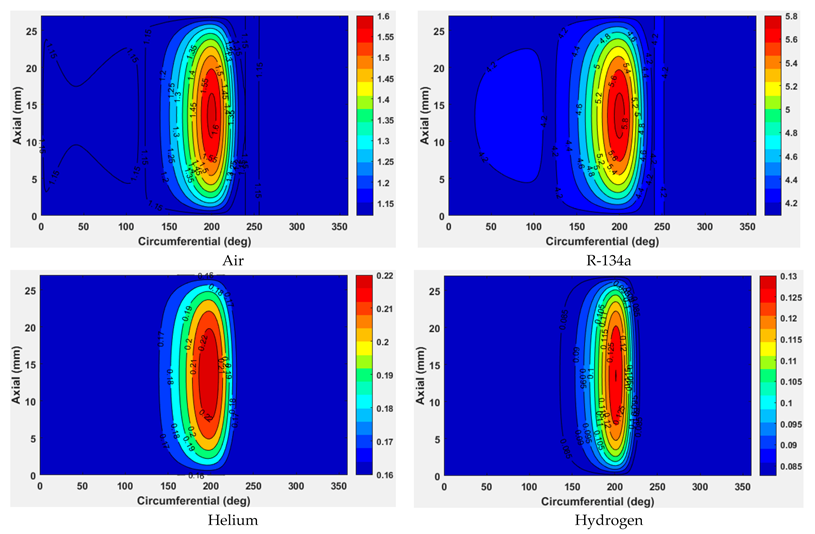
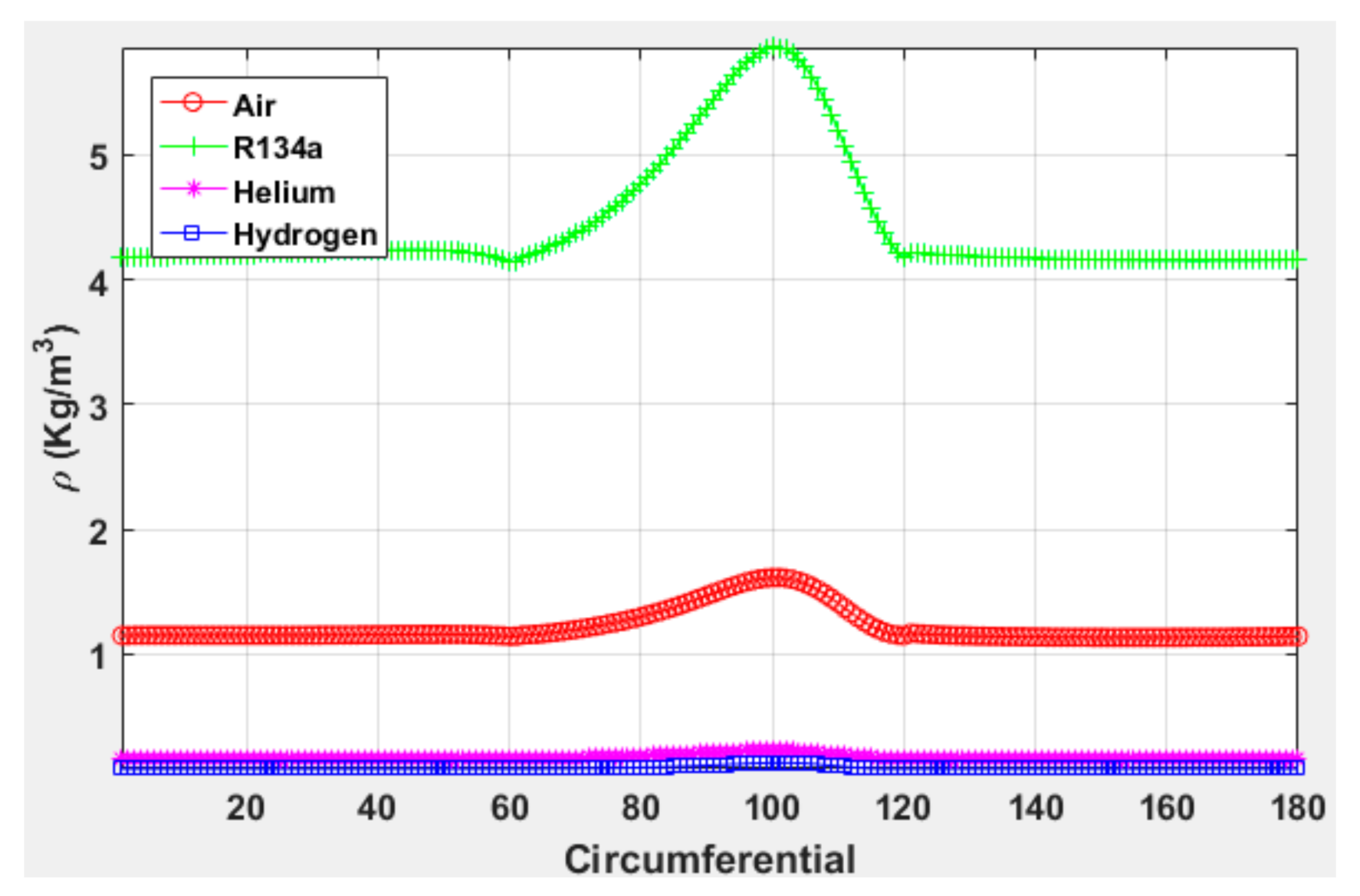
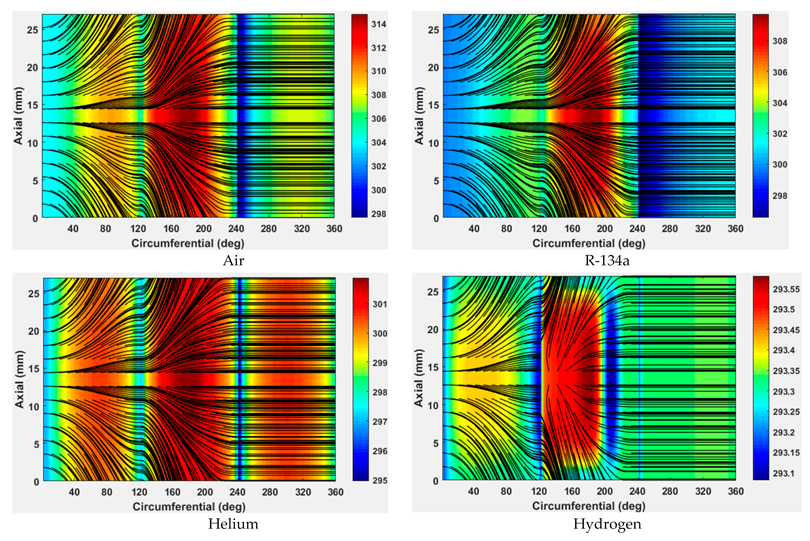
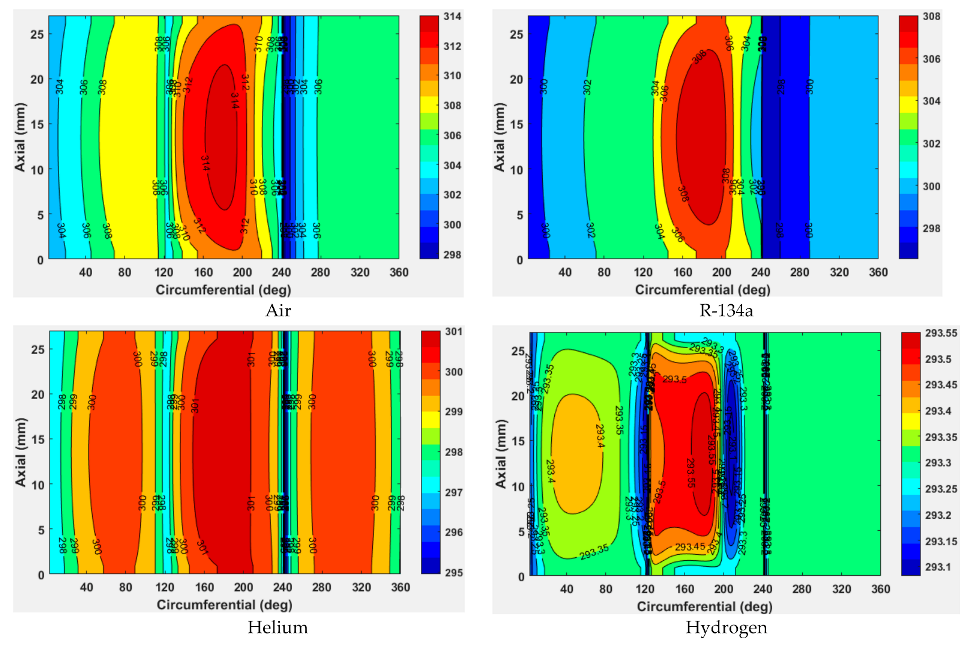
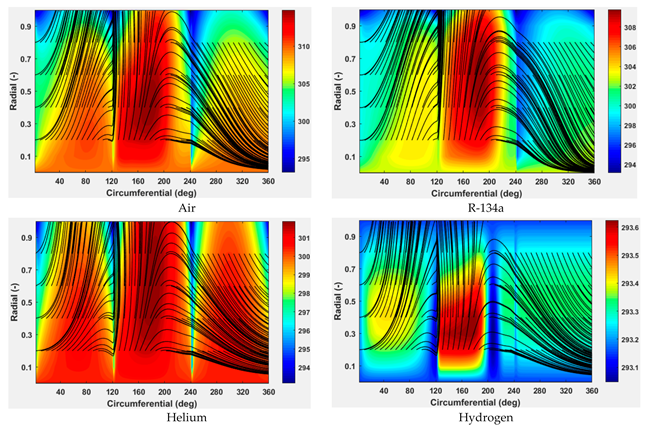
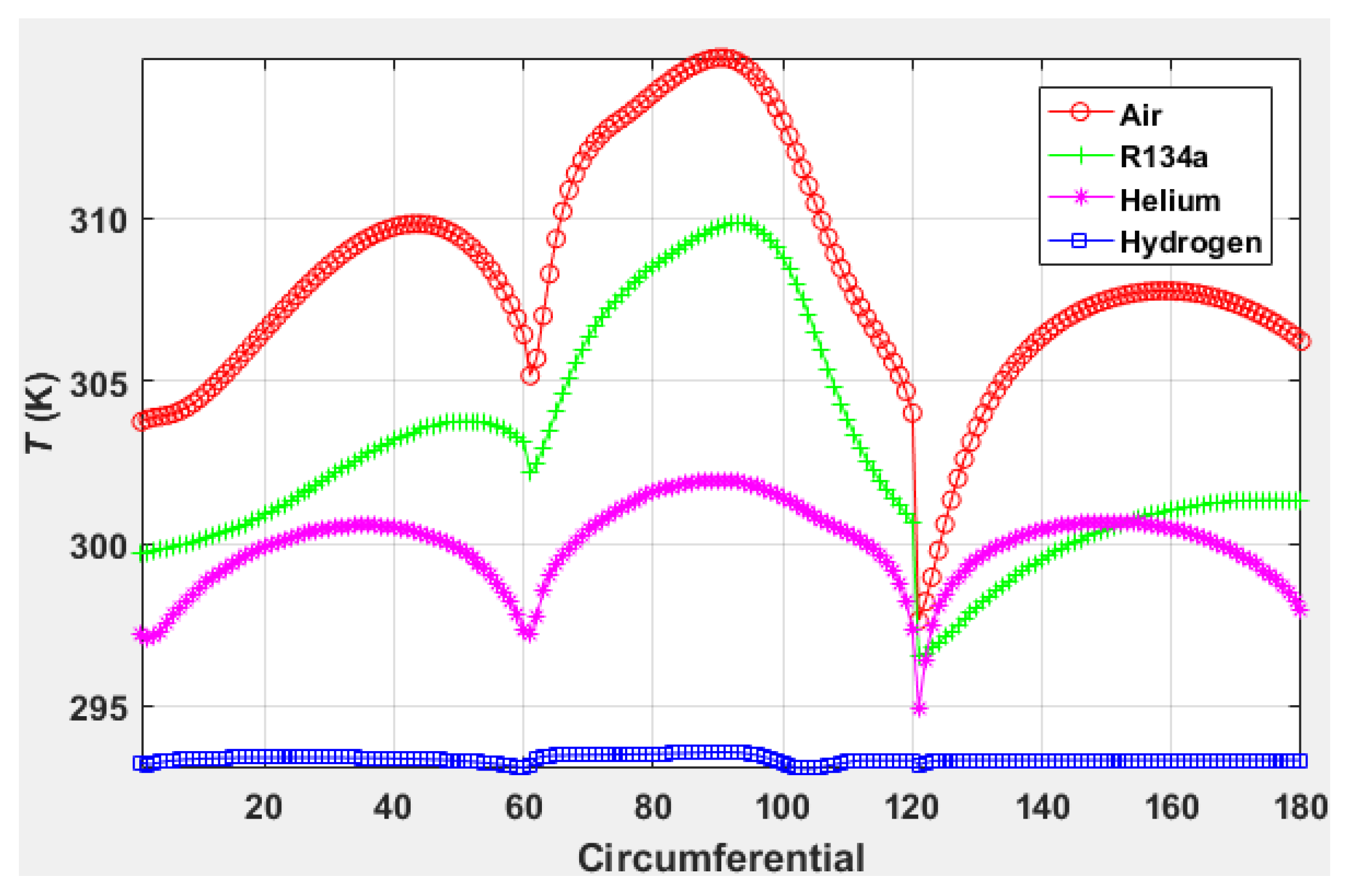
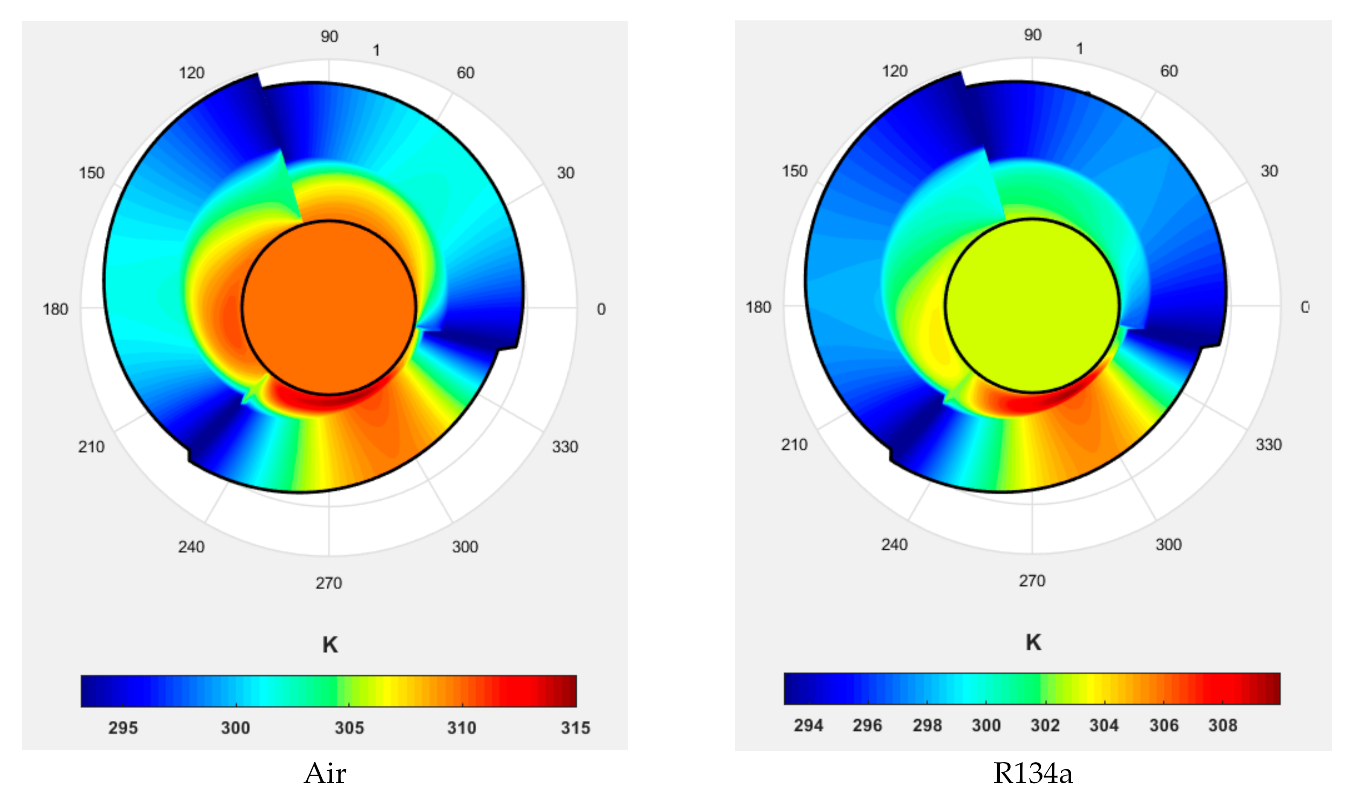
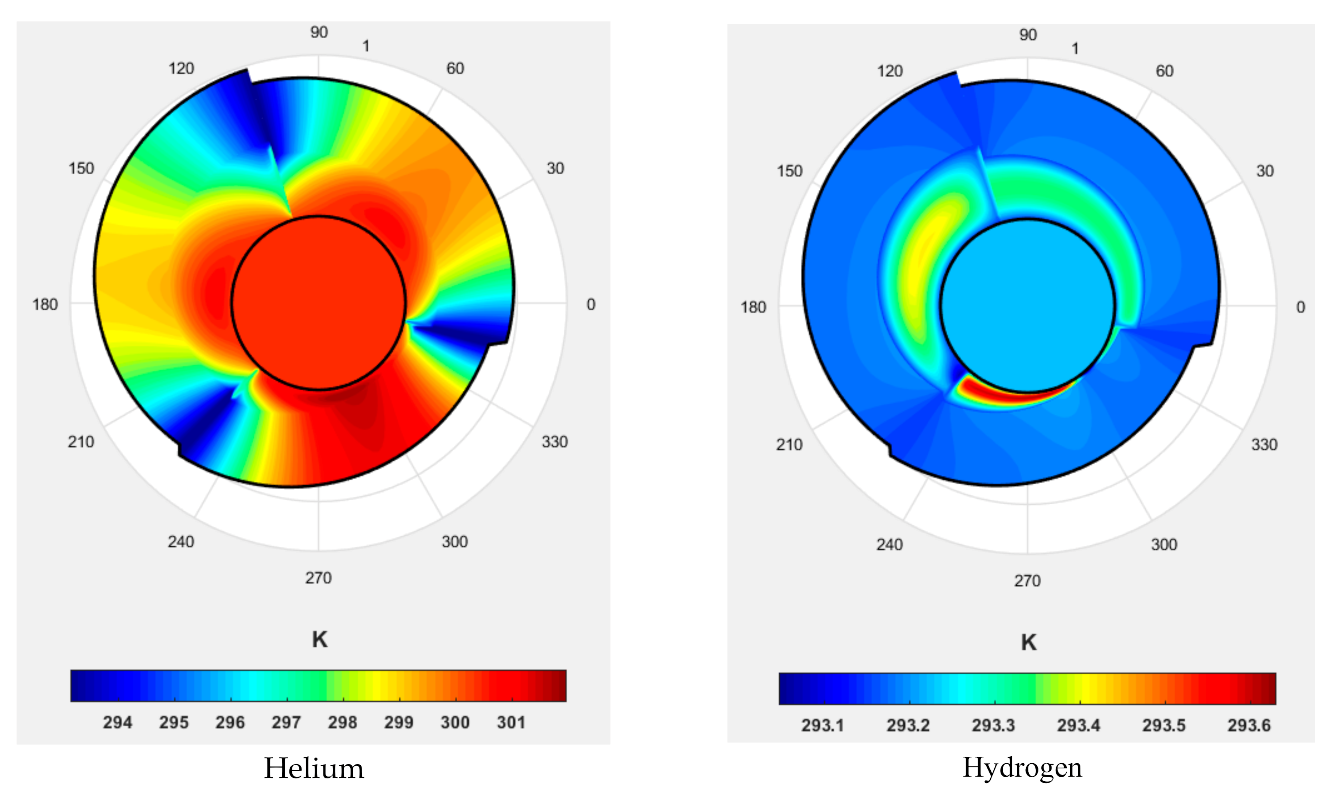
13. Results and Discussion: 3D THD Analysis
Static Characteristics
14. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Conflicts of Interest
Nomenclature
| Cb | Bearing assembling clearance (m) |
| CL | Bearing manufacturing clearance (m) |
| Ci, i = 1,3 | Phenomenological constants in Clapeyron’s formula |
| cp | Heat capacity (J·kg−1·K−1) |
| Rs | Shaft radius (m) |
| Rh | Housing radius (m) |
| RL | Sector radius (m) |
| L | Bearing axial length (m) |
| F0 | Viscosity integral coefficient F0 (m2·s·kg−1) |
| F1 | Viscosity integral coefficient F1 (s) |
| F2 | Viscosity integral coefficient F2 (m·s) |
| h | Film thickness (m) |
| Nd | Dissipation number |
| psat | Vapor pressure (bar) |
| Pe | Peclet number |
| Local Reynolds number | |
| aρ | EoS temperature-dependent coefficient |
| cmin | Minimal speed of sound in the mixture (m:s−1) |
| cv | Minimal speed of sound in the vapor (m:s−1) |
| B | EoS constant coefficient (for a given fluid) |
| M | Molar mass (kg·mol−1) |
| k, k-, k- | Thermal conductivity (W·m−1·K−1) |
| h- | Global coefficient of exchange (W·m−2·K−1) |
| mρ | EoS constant coefficient (for a given fluid) |
| p | Pressure (Pa) |
| pc | Critical pressure (Pa) |
| Prt | Prandtl number |
| R | Ideal gas constant (J·mol−1·K−1) |
| T, T- | Temperature (K) |
| Tamb | Ambient temperature (K) |
| Tc | Critical temperature (K) |
| Tac | Critical Taylor number |
| TaL | Local Taylor number |
| u,v,w | Circumferential, radial and axial velocity components (m·s−1) |
| x,y,z | Circumferential, radial and axial coordinates (m) |
| y+ | Dimensionless distance from the wall |
| Su | Sutherland number |
| QE | Flow rate at the entry of sector (m3·s−1) |
| QS | Flow rate at the exit of sector (m3·s−1) |
| QA | Flow rate in the axial direction (m3·s−1) |
| W, W- | Load (N) |
| ki | Stiffness coefficient in the local coordinates (x,y,z) (N·m−1) |
| Ki | Stiffness coefficient in the global coordinates (r,t,z) (N·m−1) |
| ci | Damping coefficient in the local coordinates (x,y,z) (N·s·m−1) |
| Ci | Damping coefficient in the global coordinates (r,t,z) (N·s·m−1) |
| t | Time (s) |
| Mc | Critical mass (kg) |
| Keq | Equivalent stiffness (N·m−1) |
| Greek symbols. | |
| Λ | Bearing number |
| Ω | Shaft rotational speed (r.p.m) |
| ρ, ρ- | Fluid mass density (kg·m−3) |
| ϕe | Local attitude angle |
| ϕ | Global attitude angle |
| α | Volume expansivity at constant pressure (K−1) |
| αf | Heat transfer diffusivity |
| δL | Thickness of the laminar sublayer (m) |
| εi | Eccentricity ratio of sector |
| εb | Eccentricity ratio of bearing |
| θ, θb | Circumferential coordinate of a lobe, circumferential coordinate the bearing, see Figure 3 |
| κ | Von Karman constant |
| μ, μ-, μ- | Dynamic viscosity (Pa·s) |
| ωρ | EoS acentric factor |
| τ | Stress tensor (kg·m−1·s−2) |
| λ | Mixing coefficient |
| γc | Whirl frequency (Hz) |
| Subscripts, Superscripts. | |
| .* | Superscript for the sum of the laminar and turbulent parameter values |
| .t | Superscript for the turbulent regime |
| .0 | Subscript for the reference value |
| .l | Subscript for the liquid phase |
| .v | Subscript for the vapor phase |
| .s | Subscript for the shaft |
| .h | Subscript for the housing |
Appendix A. Bearing Geometry
- -
- Radial assembly clearance: Cb = Rh − Rs;
- -
- Radial machining game: CL = RL − Rs;
- -
- The geometric precharge dimensionless coefficient m = 1 (Cb/CL);
- -
- The relative eccentricity εb = eb/Cb, with eb distance OOs.

Appendix B. Lubricant Properties



Appendix C

References
- Agrawal, G. Foil Air/Gas Bearing Technology an Overview. In International Gas Turbine & Aero-Engine Congress & Exhibition; ASME Paper: Orlando, FL, USA, 1997. [Google Scholar]
- Heshmat, H.; Walowit, J.; Pinkus, O. Analysis of gas-lubricated foil journal bearings. J. Lubr. Technol. 1983, 105, 647–655. [Google Scholar] [CrossRef]
- Xiong, L.; Wu, G.; Hou, Y.; Liu, L.; Ling, M.; Chen, C. Development of aerodynamic foil journal bearings for a high speed cryogenic turbo expander. Cryogenics 1997, 37, 221–230. [Google Scholar] [CrossRef]
- San Andres, L. Turbulent flow foil bearings for cryogenic applications. J. Tribol. 1995, 117, 185. [Google Scholar] [CrossRef]
- Nowak, P.; Kucharska, K.; Kaminski, M. Ecologiacal and Health Effects of Lubricant Oils Emitted into the Environment. Int. J. Environ. Res. Public Health 2019, 16, 3002. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Pei, H.; Li, F.; Chen, Y.; Huang, J.; Shen, C. Influence of biodegradable lubricant on the ecology, lubrication and achining process in minimum quality lubrication. Int. J. Adv. Manuf. Technol. 2021, 113, 1505–1516. [Google Scholar] [CrossRef]
- Dragicevic, M. The Application of Alternative Techniques for Cooling, Flushing and Lubrication to Improve Efficiency of Machining Processes. Teh. Vjesn. 2018, 25, 1561–1568. [Google Scholar]
- Nair, S.; Nair, K.; Rajendrakumar, P. Evaluation of physicochemical, thermal and tribological properties of sesame oil: A potential agricultural crop base stack for eco-friendly industrial lubricants. Int. J. Agric. Resour. Gov. Ecol. 2017, 13, 77–90. [Google Scholar] [CrossRef]
- Pereira, O.; Rodríguez, A.; Fernández-Abia, A.; Barreiro, J.; de Lacalle, L.L. Cryogenic and minimum quantity lubrication for an eco-efficiency turning of AISA 304. J. Clean. Prod. 2016, 139, 440–449. [Google Scholar] [CrossRef]
- Peng, D.; Robinson, D. A new two-constant equation of state. Ind. Eng. Chem. Fundam. 1976, 15, 59–64. [Google Scholar] [CrossRef]
- Lobo, L.; Ferreira, A. Phase equilibria from the exactly integrated Clapeyron equation. J. Chem. Thermodyn. 2001, 33, 1597–1617. [Google Scholar] [CrossRef] [Green Version]
- Odyck, D.; Venner, C. Compressible Stokes flow in thin films. J. Tribol. 2003, 125, 543–551. [Google Scholar] [CrossRef]
- Bohn, D. Environmental effects on the speed of sound. J. Audio Eng. Soc. 1988, 36, 223–231. [Google Scholar]
- Dowson, D. A generalized Reynolds equation for fluid-film lubrication. Int. J. Mech. Sci. 1962, 4, 159–170. [Google Scholar] [CrossRef]
- Garcia, M.; Bou-Saïd, B.; Rocchi, J.; Grau, G. Refrigerant Foil Bearing Behavior. A Thermo-HydroDynamic Study (Application to Rigid Bearings). Available online: http://dx.doi.org/10.1016/j.triboint.2012.12.006 (accessed on 3 June 2021).
- Frêne, J.; Nicolas, D.; Degueurce, B.; Berthe, D.; Godet, M. Lubrification Hydrodynamique: Paliers et Butées; Eyrolles: Paris, France, 1990. [Google Scholar]
- Reichardt, H. Vollstindige Darstellung der turbulenten Geschwindigkeitsverteilung in glatten Leitungen. ZAMM-J. Appl. Math. Mech. 1951, 31, 208–219. [Google Scholar] [CrossRef]
- Ng, C. Fluid dynamic foundation of turbulent lubrication theory. Asle Trans. 1964, 7, 311–321. [Google Scholar] [CrossRef]
- Hinze, J. Turbulence; Mcfirau Hill: New York, NY, USA, 1959. [Google Scholar]
- Dowson, D.; Hudson, J.D.; Hunter, B.; March, C.N. An experimental investigation of the thermal equilibrium of steadily loaded journal bearings. In Proceedings of the Institution of Mechanical Engineers; Sage: London, UK, 1966; Volume 181, Part 3B; pp. 70–80. [Google Scholar]
- Boncompain, R.; Fillon, M.; Frêne, J. Analysis of thermal effects in hydrodynamic journal bearings. ASME J. Tribol. 1986, 108, 219–224. [Google Scholar] [CrossRef]
- Boncompain, R. Les Paliers Lisses en Régime Thermohydrodynamique—Aspects Théoriques et Expérimen-Taux. Thèse de Doctorat d’état, Université de Poitiers, Poitiers, France, 1984. [Google Scholar]
- Xie, Z.; Zhang, Y.; Zhou, J.; Zhu, W. Theoretical and experimental research on the micro interface lubrication regime of water lubricated bearing. Mech. Syst. Signal Process. 2021, 151, 107422. [Google Scholar] [CrossRef]
- Bouyer, J.; Fillon, M. On the significance of thermal and deformation effects on a plain journal bearing subjected to severe operating conditions. J. Tribol. 2004, 126, 819. [Google Scholar] [CrossRef]
- Bruckner, R.; Dellacorte, C.; Prahl, J. Analytic Modeling of the Hydrodynamic, Thermal, and Structural Behavior of Foil Thrust Bearings; Report, NASA/TM2005-213811; NASA: Cleveland, OH, USA, 2005.





















{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Characteristics | Value |
|---|---|
| Length, | 27 |
| Shaft diameter, | 28 |
| Clearance, | 90 |
| Number of lobes | 3 |
| Eccentricity ratio, | 0.1–0.9 |
| Shaft speed, | 40,000–180,000 |
| Preload, | 0.2 |
| Amplitude of groove, | 10 |
| Global overall heat transfer coefficient, | 80 |
| Thermal conductivity, | 36 |
| Characteristics | Gas | |||
|---|---|---|---|---|
| AirR-729 | 1,1,1,3,3-Pentafluoropropane R-134a | Helium R-704 | Hydrogen R-702 | |
| Supply pressure | 1. | 1. | 1. | 1. |
| Supply temperature | 293.15 | 293.15 | 293.15 | 293.15 |
| Viscosity | 18.26 | 12.3 | 19.62 | 8.81 |
| Molar mass, | 28.95 | 134.05 | 4.0026 | 2.01594 |
| Heat capacity | 1006 | 976.9 | 5193 | 14290 |
| Thermal conductivity | 0.026 | 0.012 | 0.1535 | 0.18248 |
| Critical pressure | 37.878 | 36.51 | 2.2746 | 13.15 |
| Critical temperature | 132.53 | 427.16 | 5.2 | 33.19 |
| Acentric factor | 0.0335 | 0.32668 | −0.382 | −0.219 |
| Sutherland constants (-) | 120 | 110.4 | 79 | 72 |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2021 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Bouchehit, B.; Bou-Saïd, B.; Tichy, J. Towards Ecological Alternatives in Bearing Lubrication. Lubricants 2021, 9, 62. https://doi.org/10.3390/lubricants9060062
Bouchehit B, Bou-Saïd B, Tichy J. Towards Ecological Alternatives in Bearing Lubrication. Lubricants. 2021; 9(6):62. https://doi.org/10.3390/lubricants9060062
Chicago/Turabian StyleBouchehit, Bachir, Benyebka Bou-Saïd, and John Tichy. 2021. "Towards Ecological Alternatives in Bearing Lubrication" Lubricants 9, no. 6: 62. https://doi.org/10.3390/lubricants9060062
APA StyleBouchehit, B., Bou-Saïd, B., & Tichy, J. (2021). Towards Ecological Alternatives in Bearing Lubrication. Lubricants, 9(6), 62. https://doi.org/10.3390/lubricants9060062