Sparse-TFM Imaging of Lamb Waves for the Near-Distance Defects in Plate-Like Structures


Abstract
:1. Introduction
2. Theory for the Sparse-TFM Imaging Using the Diffuse Field Information
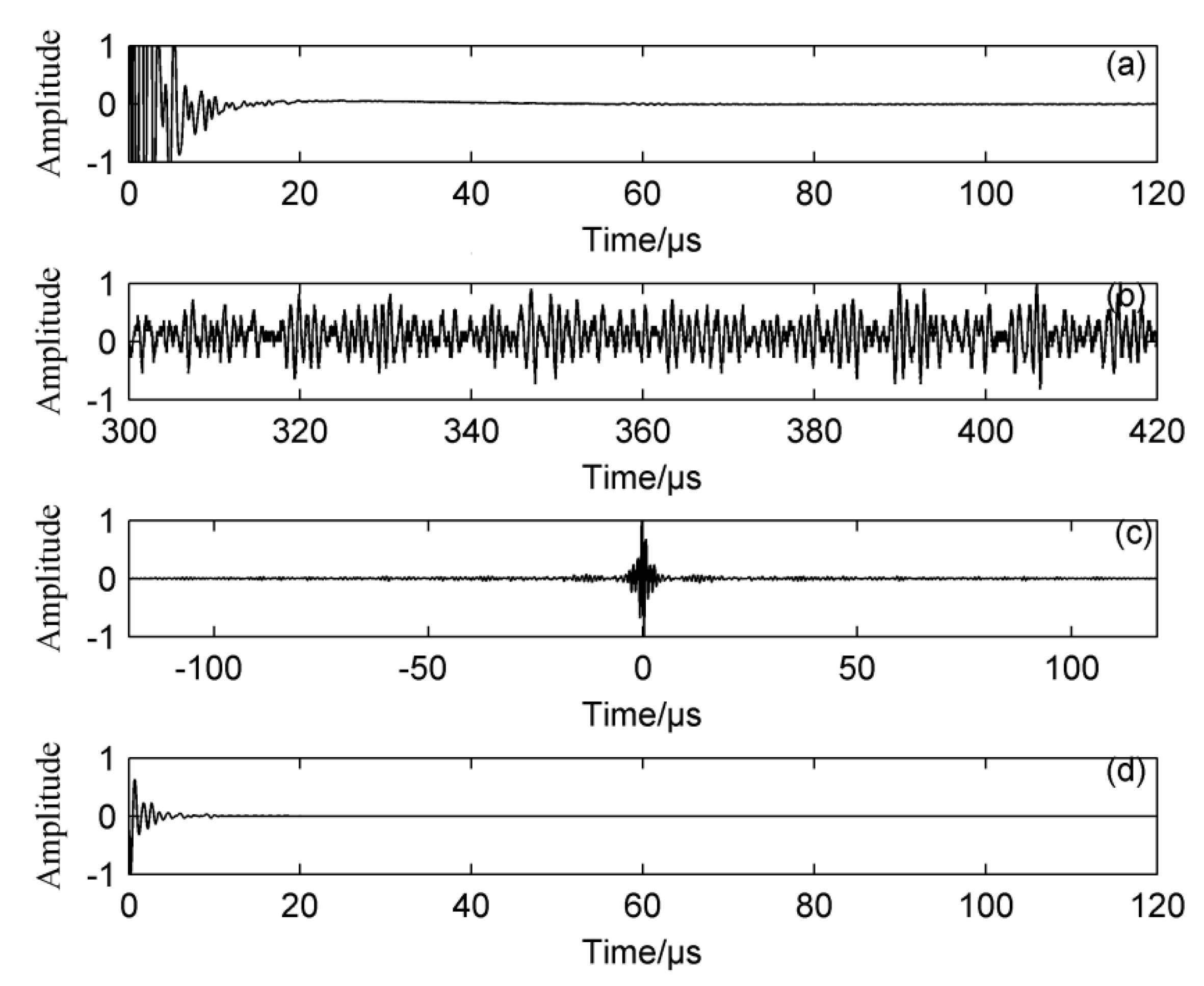
2.1. Green’s Function Response Recovery
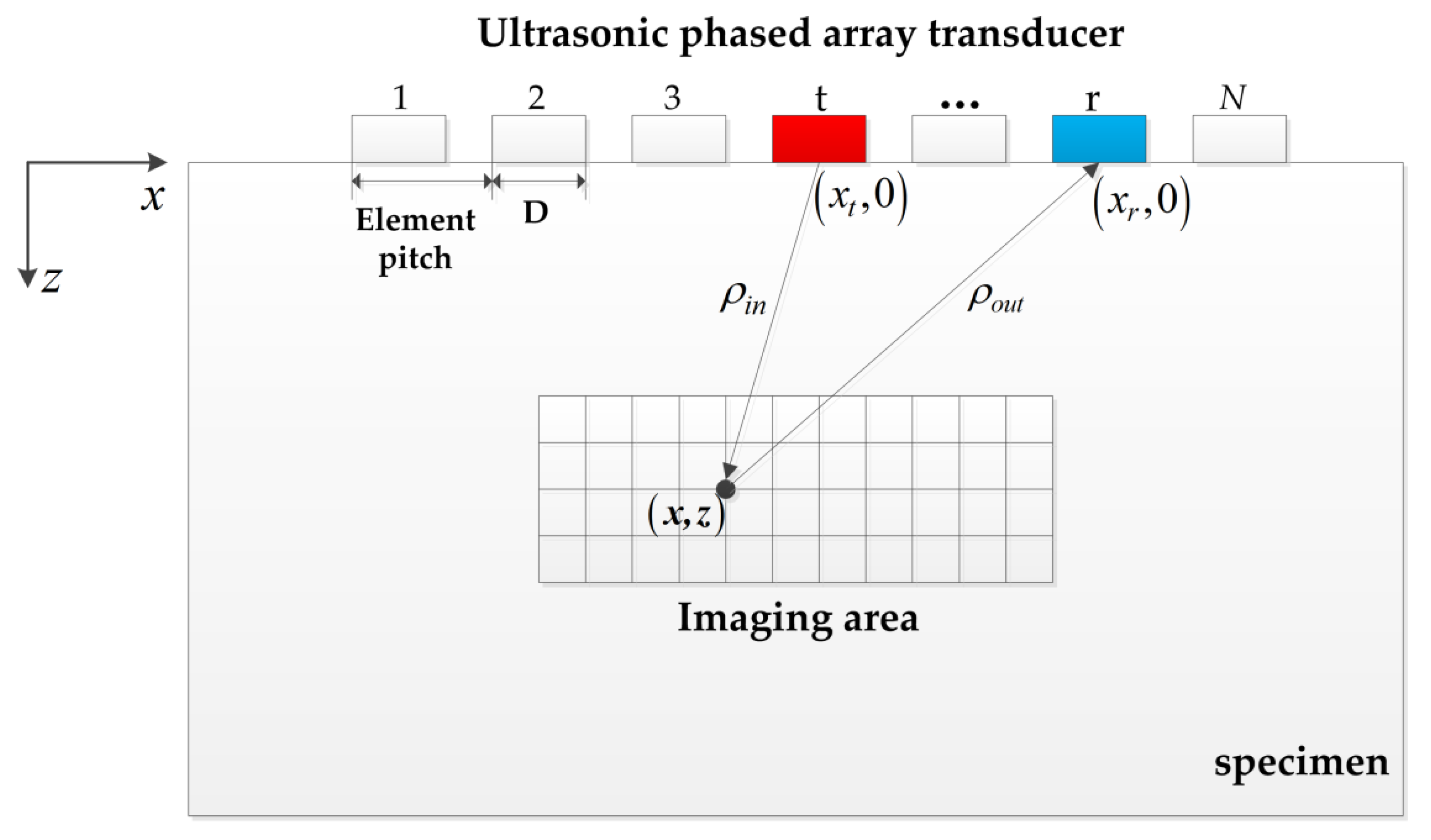
2.2. Sparse-TFM Imaging
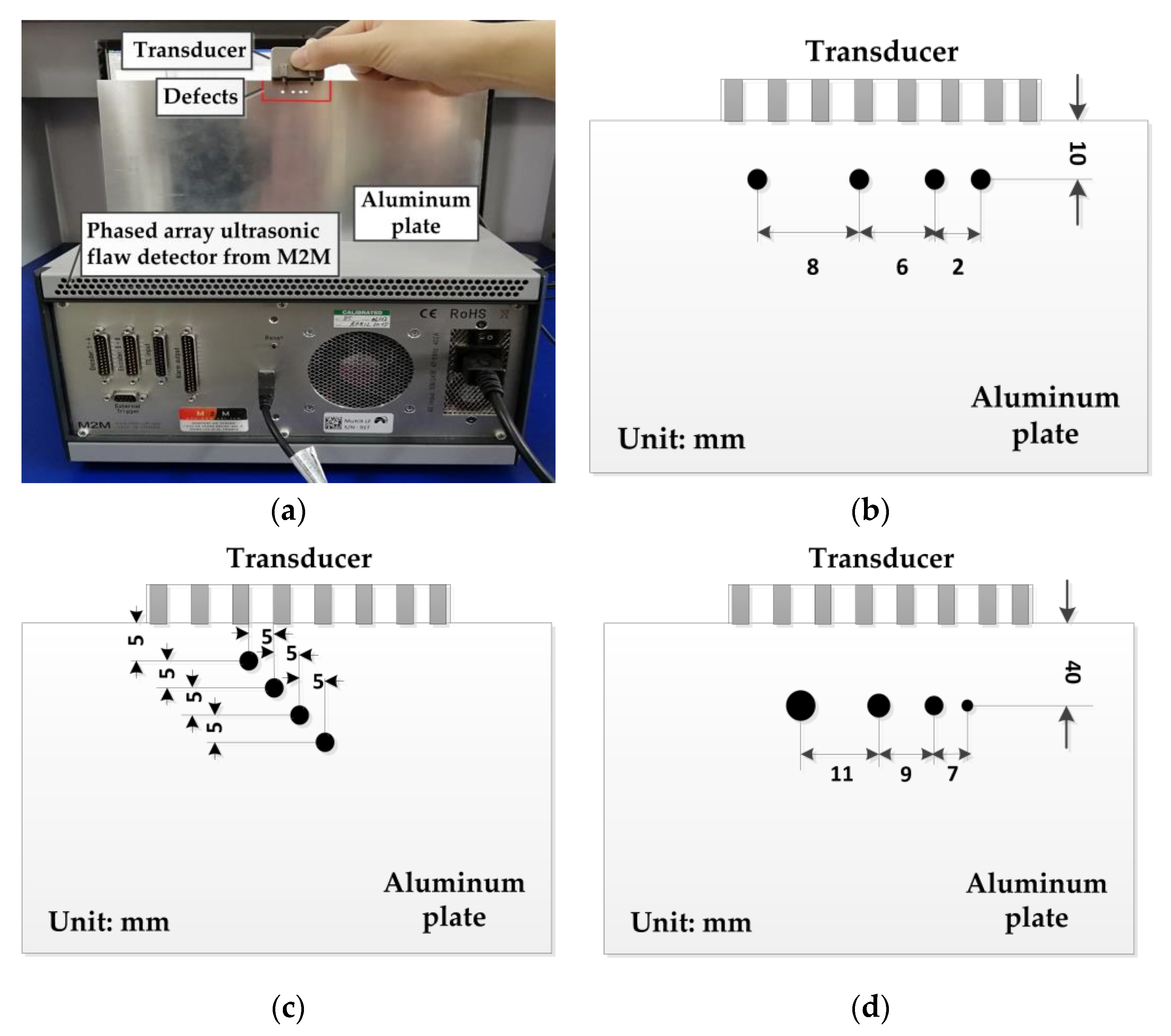
3. Experiments
4. Experimental Results
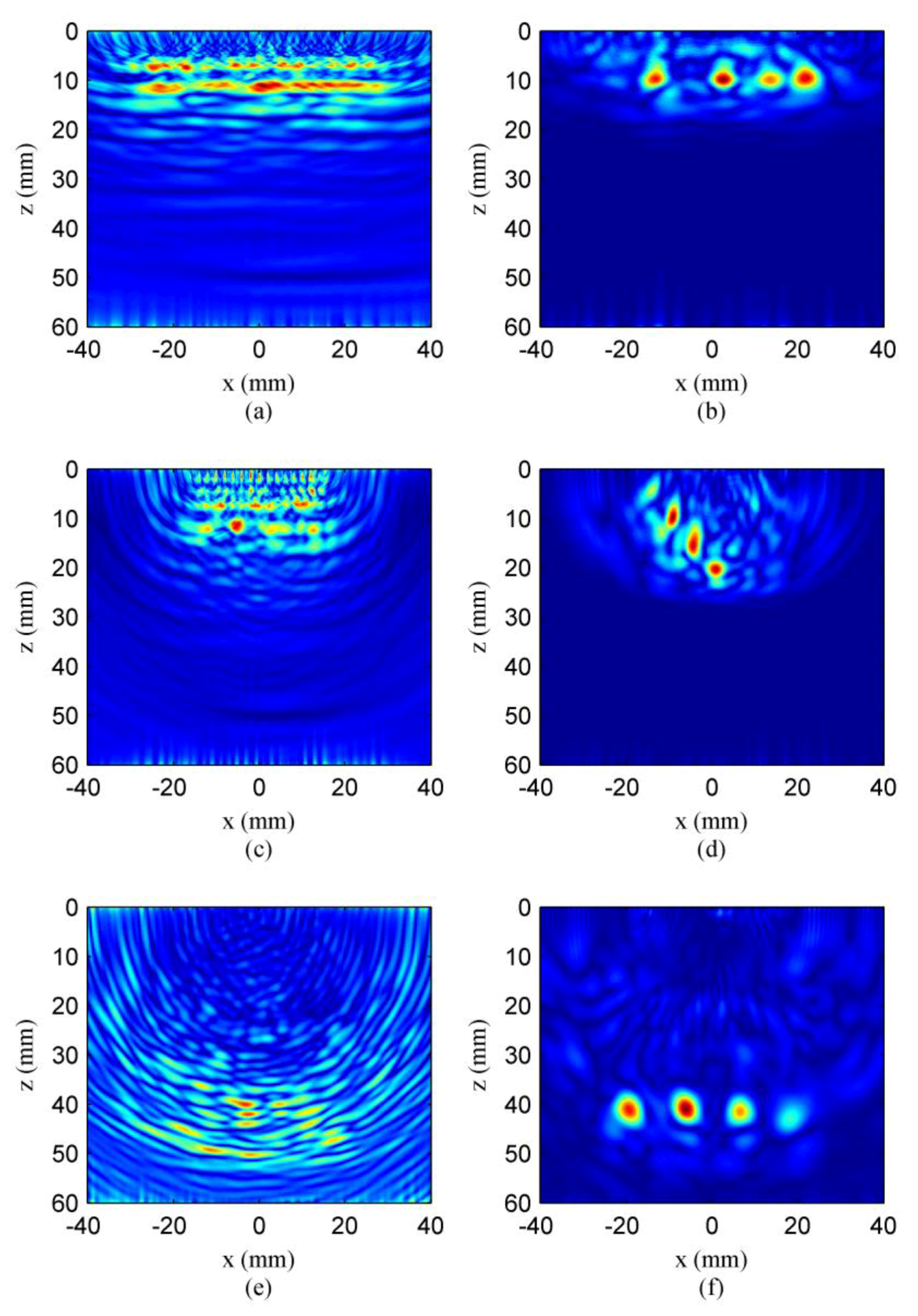
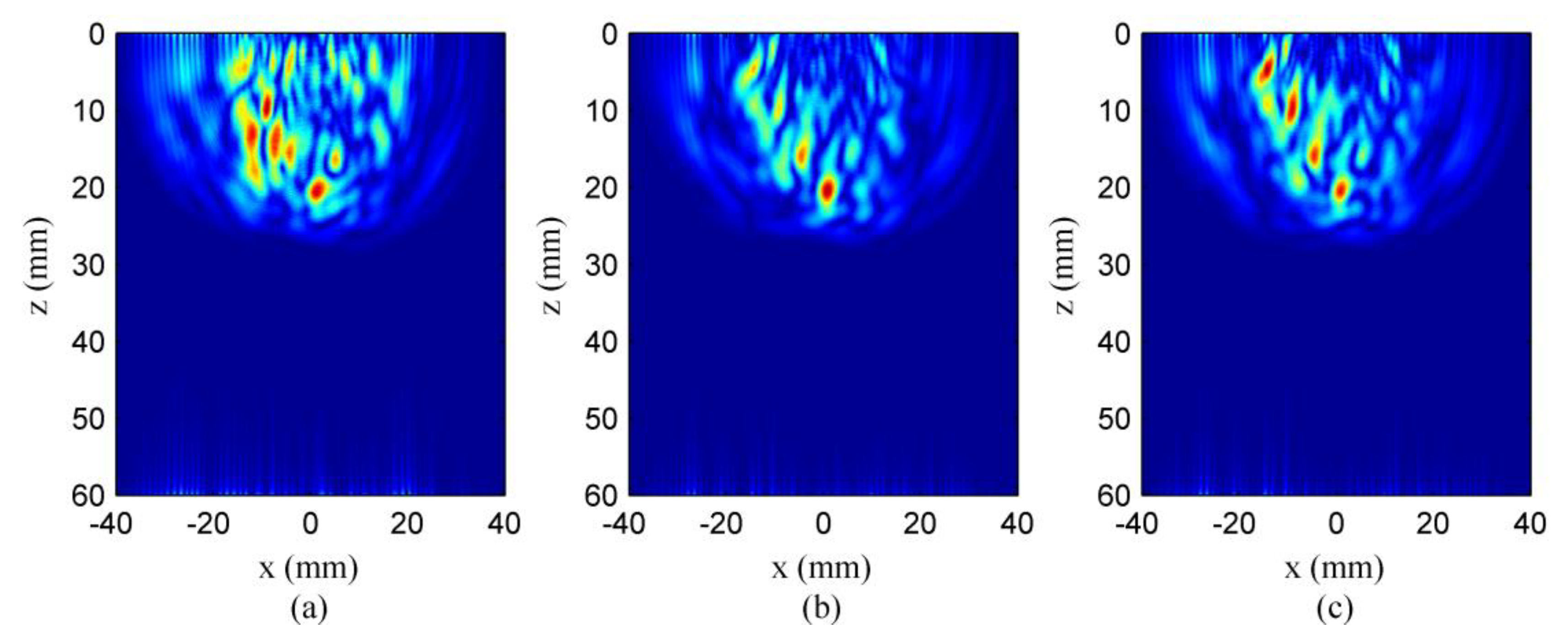
4.1. Near-Distance TFM Imaging
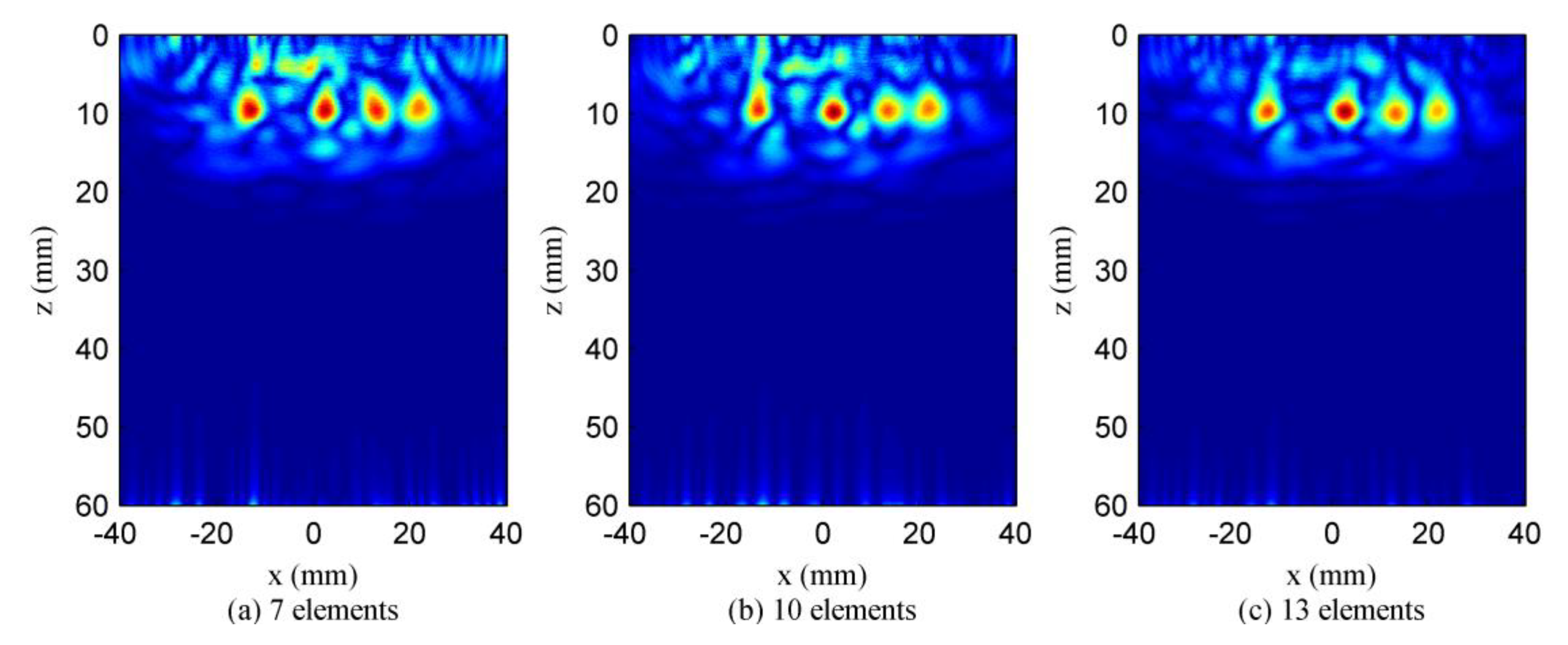
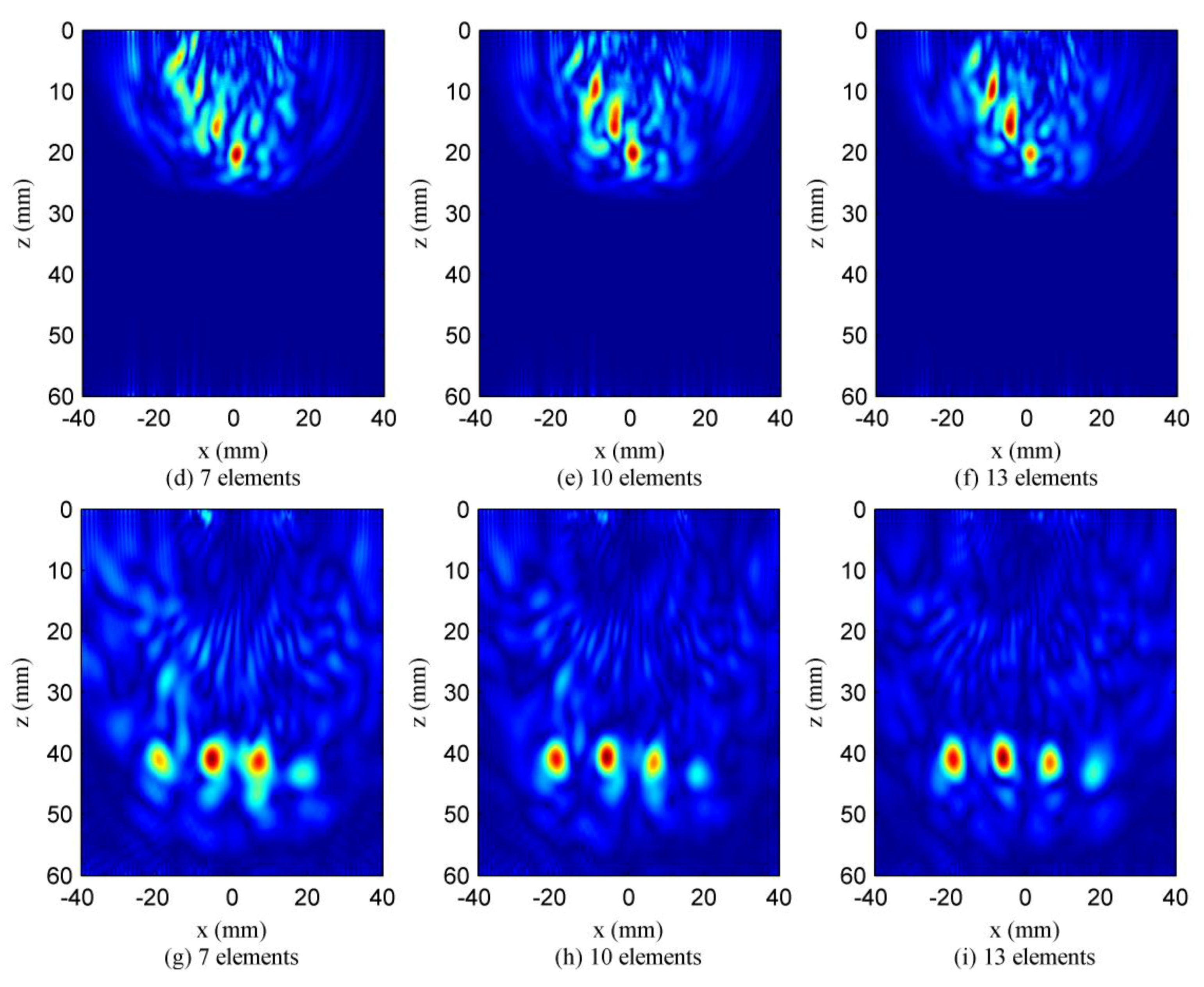
4.2. Sparse Arrays Designed by Using GA
4.3. Near-Distance Sparse-TFM Imaging
5. Comparison and Discussion
6. Conclusions
- The feasibility of using the cross-correlation of diffusion field signals from Lamb waves to recover the Green’s function was verified, which is the key process of detecting near-distance defects with an ultrasonic phased array.
- Combining the TFM imaging, a hybrid full matrix formed through an appropriate temporal weighting sum of the reconstruction and conventional full matrix contained the near-distance information and later time information for the imaging of near-distance defects. The defect information presented using this method was almost consistent with the reality, but the calculation was time consuming.
- To maximize the reduction of the data processing times, the sparse-TFM proposed in this paper was similar to the TFM algorithm, but not all elements were used. This work considered the case of a sparse receiver array and a full transmission array, and the sparse-TFM image quality depended on the correct location of active elements in the sparse array to avoid the artifacts and sidelobe noise. GA is an effective optimization method to design sparse receive arrays, which have better performance compared to non-optimized sparse arrays.
Author Contributions
Funding
Conflicts of Interest
References
- Zhang, C.; Huthwaite, P.; Lowe, M. The Application of the Factorization Method to the Subsurface Imaging of Surface-Breaking Cracks. IEEE Trans. Ultrason. Ferroelectr. Freq. Contr. 2018, 65, 497–511. [Google Scholar] [CrossRef]
- Xiang, Y.; Teng, D.; Deng, M.; Li, Y.; Liu, C.; Xuan, F. Characterization of Local Residual Stress at Blade Surface by the V(z) Curve Technique. Metals 2018, 8, 651. [Google Scholar] [CrossRef]
- Yuan, C.; Xie, C.H.; Li, L.C.; Zhang, F.Z.; Gubanski, S.M. Ultrasonic phased array detection of internal defects in composite insulators. IEEE Trans. Dielectr. Electr. Insul. 2016, 23, 525–531. [Google Scholar] [CrossRef]
- Tian, S.Y.; Xu, K. An Algorithm for Surface Defect Identification of Steel Plates Based on Genetic Algorithm and Extreme Learning Machine. Metals 2017, 7, 311. [Google Scholar] [CrossRef]
- Weaver, R.; Lobkis, O. On the emergence of the Green’s function in the correlations of a diffuse field: Pulse-echo using thermal phonons. Ultrasonics 2002, 40, 435–439. [Google Scholar] [CrossRef]
- Larose, E.; Derode, A.; Campillo, M.; Fink, M. Imaging from one-bit correlations of wideband diffuse wave fields. J. Appl. Phys. 2004, 95, 8393–8399. [Google Scholar] [CrossRef]
- Larose, E.; Roux, P.; Campillo, M. Reconstruction of Rayleigh-Lamb dispersion spectrum based on noise obtained from an air-jet forcing. J. Acoust. Soc. Am. 2007, 122, 3437–3444. [Google Scholar] [CrossRef]
- Sabra, K.G.; Gerstoft, P.; Roux, P.; Kuperman, W.A. Extracting time-domain Green’s function estimates from ambient seismic noise. Geophys. Res. Lett. 2005, 32, L03310. [Google Scholar] [CrossRef]
- Lobkis, O.I.; Weaver, R.L. On the emergence of the Green’s function in the correlations of a diffuse field. J. Acoust. Soc. Am. 2001, 110, 3011–3017. [Google Scholar] [CrossRef]
- Campillo, M.; Paul, A. Long-Range Correlations in the Diffuse Seismic Coda. Science 2003, 299, 547–549. [Google Scholar] [CrossRef]
- Chehami, L.; Rosny, J.D.; Prada, C.; Moulin, E.; Assaad, J. Experimental study of passive defect localization in plates using ambient noise. IEEE-T Special Issue 2015, 62, 1544–1553. [Google Scholar] [CrossRef]
- Holmes, C.; Drinkwater, B.W.; Wilcox, P.D. Post-Processing of the Full Matrix of Ultrasonic Transmit–Receive Array Data for Non-Destructive Evaluation. NDT&E Int. 2005, 38, 701–711. [Google Scholar]
- Austeng, A.; Holm, S. Sparse 2-D arrays for 3-D phased array imaging - design methods. IEEE Trans. Ultrason. Ferroelect. Freq. Contr. 2002, 49, 1073–1086. [Google Scholar] [CrossRef]
- Yang, P.; Chen, B.; Shi, K.R. A novel method to design sparse linear arrays for ultrasonic phased array. Ultrasonics 2006, 44, 717–721. [Google Scholar] [CrossRef]
- Haupt, R.L. Adaptively thinned arrays. IEEE Trans. Antennas Propagat. 2015, 63, 1626–1632. [Google Scholar] [CrossRef]
- Yang, S.H.; Kiang, J.F. Optimization of Sparse Linear Arrays Using Harmony Search Algorithms. IEEE Trans. Antennas Propagat. 2015, 63, 4732–4738. [Google Scholar] [CrossRef]
- Trucco, A. Thinning and weighting of large planar arrays by simulated annealing. IEEE Trans. Ultrason. Ferroelect. Freq. Contr. 1999, 46, 347–355. [Google Scholar] [CrossRef]
- Murino, V.; Trucco, A.; Regazzoni, C.S. Synthesis of Unequally Spaced Arrays by Simulated annealing. IEEE Trans. Signal. Process. 1996, 44, 119–122. [Google Scholar] [CrossRef]
- Hu, H.; Du, J.; Xu, N.; Jeong, H.; Wang, X.H. Ultrasonic sparse-TFM imaging for a two-layer medium using genetic algorithm optimization and effective aperture correction. NDT&E Int. 2017, 90, 24–32. [Google Scholar]
- Haupt, R.L. An introduction to genetic algorithms for electromagnetics. IEEE Antennas Propagat. Mag. 1995, 37, 7–15. [Google Scholar] [CrossRef]
- Du Plessis, W.P.; Bin Ghannam, A. Improved Seeding Schemes for Interleaved Thinned Array Synthesis. IEEE Trans. Antennas Propagat. 2014, 62, 5906–5910. [Google Scholar] [CrossRef] [Green Version]
- Potter, J.N.; Wilcox, P.D.; Croxford, A.J. Diffuse field full matrix capture for near-surface ultrasonic imaging. Ultrasonics 2018, 82, 44–48. [Google Scholar] [CrossRef]
- Lockwood, G.R.; Li, P.C.; O’Donnell, M.; Foster, F.S. Optimizing the radiation pattern of sparse periodic linear arrays. IEEE Trans. Ultrason. Ferroelectr. Freq. Contr. 1996, 43, 7–14. [Google Scholar] [CrossRef]
- Moreau, L.; Drinkwater, B.W.; Wilcox, P.D. Ultrasonic imaging algorithms with limited transmission cycles forrapid nondestructive evaluation. IEEE Trans. Ultrason. Ferroelectr. Freq. Contr. 2009, 56, 1932–1944. [Google Scholar] [CrossRef] [PubMed]
- Sun, F.; Zeng, Z.M.; Jin, S.J.; Chen, S.L. Sound-field of Discrete Point Sources Simulation on Deflecting and Focusing of Near-field of Ultrasonic Phased Array. J. Sys. Simul. 2013, 25, 1108–1112. [Google Scholar]
- Rodriguez, S.; Deschamps, M.; Castaings, M.; Ducasse, E. Guided wave topological imaging of isotropic plates. Ultrasonics 2014, 54, 1880–1890. [Google Scholar] [CrossRef] [PubMed]
- Fan, G.; Zhang, H.; Zhang, H.; Zhu, W.; Chai, X. Lamb Wave Local Wavenumber Approach for Characterizing Flat Bottom Defects in an Isotropic Thin Plate. Appl. Sci. 2018, 8, 1600. [Google Scholar] [CrossRef]
- Haupt, R.L. Thinned arrays using genetic algorithms. IEEE Trans. Antennas Propagat. 1994, 42, 993–999. [Google Scholar] [CrossRef]
- Shi, D.H.; Xi, J.; Zhou, Z.W. Research on optimization method of symmetric thinned planar array. J. Spacecraft TT&C Technol. 2013, 32, 302–305. [Google Scholar]
- Zhang, J.; Drinkwater, B.W.; Wilcox, P.D. Effects of array transducer inconsistencies on total focusing method imaging performance. NDT&E Int. 2011, 44, 361–368. [Google Scholar]
- Velichko, A.; Wilcox, P.D. An analytical comparison of ultrasonic array imaging algorithms. J. Acoust. Soc. Am. 2010, 127, 2377–2384. [Google Scholar] [CrossRef] [PubMed]








{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Parameter | Value |
|---|---|
| Number of elements | 16 |
| Element width | 1.8 mm |
| Element pitch | 2.0 mm |
| Center frequency | 1.0 MHz |
| Sampling frequency | 50 MHz |
| Sparse Type | Element Layout |
|---|---|
| 13 elements | 1011111111111001 |
| 10 elements | 1101011100011011 |
| 7 elements | 1010010100010011 |
| Number of Elements | API | SNR (dB) | Computation Time (s) | |
|---|---|---|---|---|
| Specimen 1 | 16 | 0.9129 | 14.48 | 25.78 |
| 13 | 1.0978 | 13.82 | 20.21 | |
| 10 | 1.1080 | 12.74 | 15.98 | |
| 7 | 1.1575 | 9.47 | 11.85 | |
| Specimen 2 | 16 | 1.1417 | 14.93 | 25.67 |
| 13 | 1.4247 | 12.77 | 20.76 | |
| 10 | 1.6434 | 10.98 | 16.39 | |
| 7 | 1.7477 | 7.02 | 11.61 | |
| Specimen 3 | 16 | 1.7408 | 15.06 | 25.75 |
| 13 | 1.7531 | 14.13 | 20.32 | |
| 10 | 1.8180 | 12.32 | 16.12 | |
| 7 | 2.0959 | 8.97 | 11.73 | |
© 2019 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Zhang, H.; Liu, Y.; Fan, G.; Zhang, H.; Zhu, W.; Zhu, Q. Sparse-TFM Imaging of Lamb Waves for the Near-Distance Defects in Plate-Like Structures. Metals 2019, 9, 503. https://doi.org/10.3390/met9050503
Zhang H, Liu Y, Fan G, Zhang H, Zhu W, Zhu Q. Sparse-TFM Imaging of Lamb Waves for the Near-Distance Defects in Plate-Like Structures. Metals. 2019; 9(5):503. https://doi.org/10.3390/met9050503
Chicago/Turabian StyleZhang, Haiyan, Yaqun Liu, Guopeng Fan, Hui Zhang, Wenfa Zhu, and Qi Zhu. 2019. "Sparse-TFM Imaging of Lamb Waves for the Near-Distance Defects in Plate-Like Structures" Metals 9, no. 5: 503. https://doi.org/10.3390/met9050503
APA StyleZhang, H., Liu, Y., Fan, G., Zhang, H., Zhu, W., & Zhu, Q. (2019). Sparse-TFM Imaging of Lamb Waves for the Near-Distance Defects in Plate-Like Structures. Metals, 9(5), 503. https://doi.org/10.3390/met9050503