Automated Positioning of Anchors for Personal Fall Arrest Systems for Steep-Sloped Roofs


Abstract
:1. Introduction
2. Literature Review
2.1. The Need for Using a Personal Fall Arrest System (PFAS) in Roofing Construction
2.2. Personal Fall Arrest System (PFAS) Compliance for Roofers
2.3. Information Technology Application in Construction Safety
3. Research Methodology
4. Development and Validation of an Algorithm for Optimizing Location of PFAS Anchors
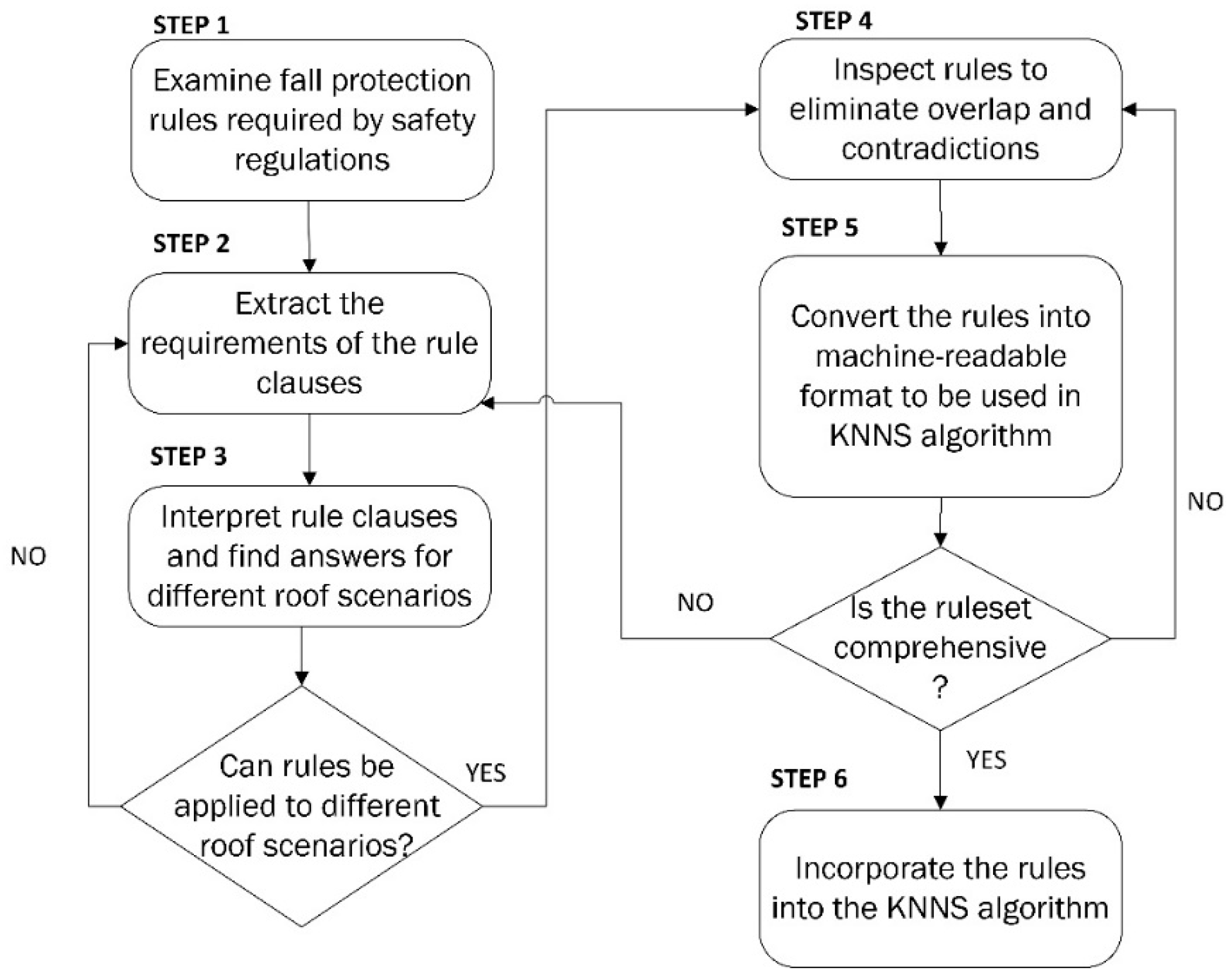
4.1. Developing a Rule-Set Algorithm for PFAS Anchor Positioning
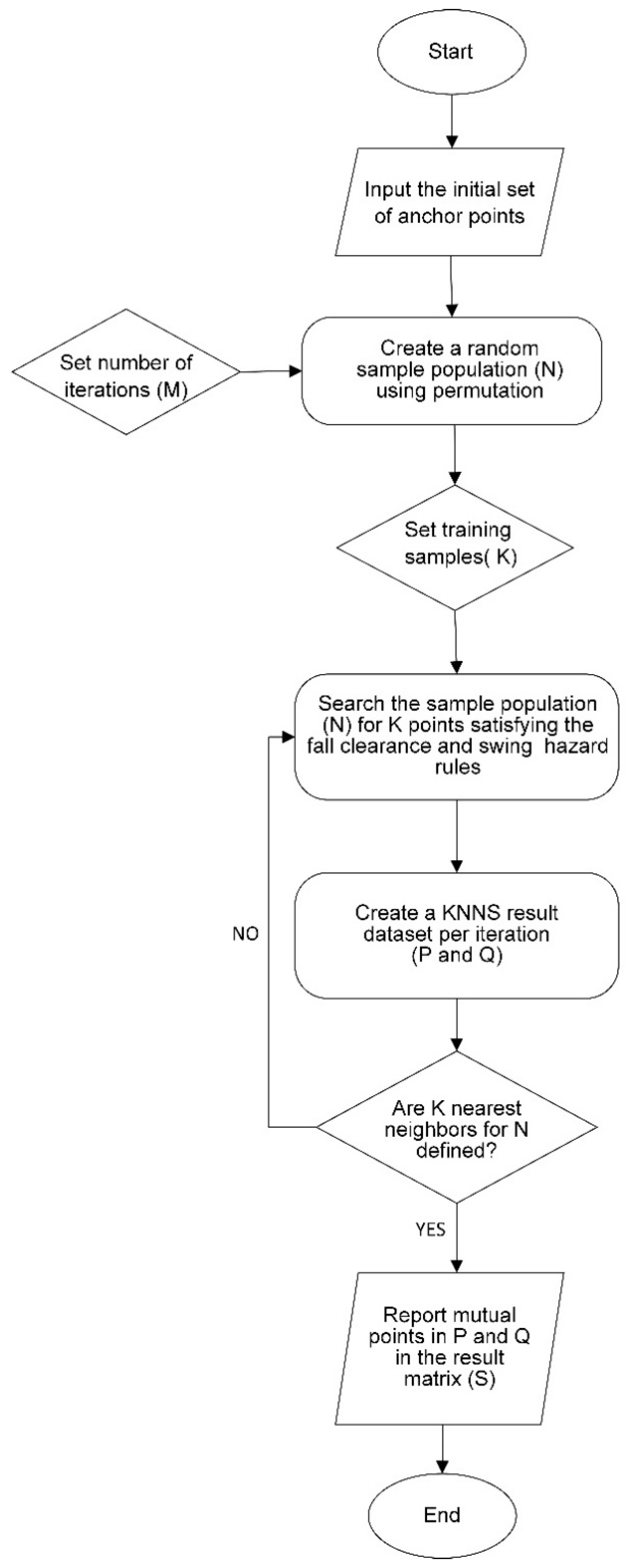
4.2. Developing K-Nearest Neighbors (KNNS)-Based Optimization Algorithm for PFAS Anchor Positioning
- Decision variables:
- o
- The allowable distance of working platform from the roof edge;
- o
- The allowable angle of the working platform in case of a nearby barrier that might lead to fall swing hazard;
- The constraints:
- o
- The roof height;
- o
- The distance of the roof edge to the closest lower obstruction;
- o
- The PFAS features;
- o
- The roof dimensions;
- o
- Location of barriers leading to swing hazard;
- The objective:
- o
- Finding the optimal locations for positioning anchors.
4.3. Implementation of the Optimization Algorithm into an Automated Tool Using Python



4.4. Workflow of the Automated Tool for PFAS Anchor Positioning
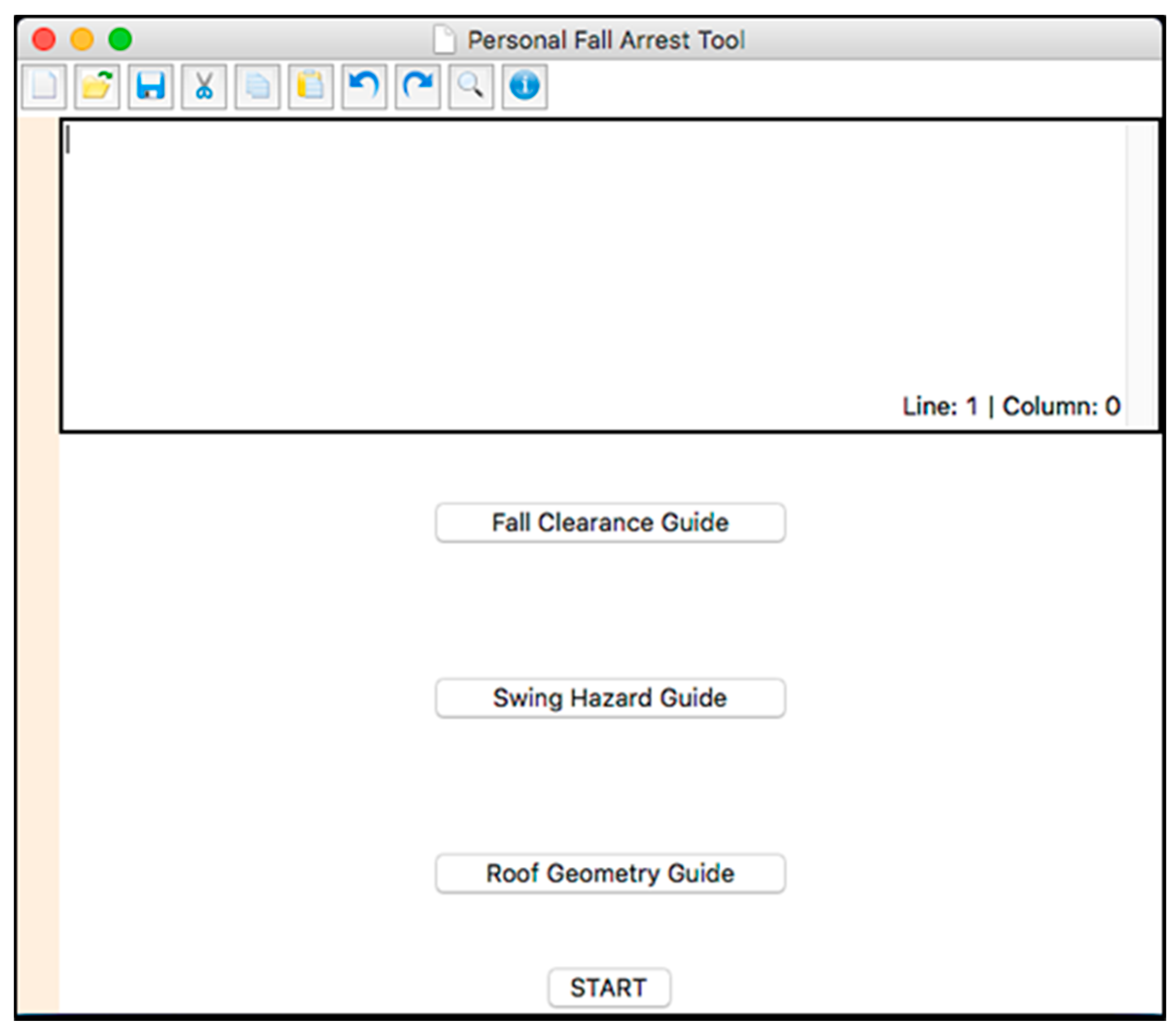
- Clicking on the START button in the main menu to open the user input panel (see Figure 3);
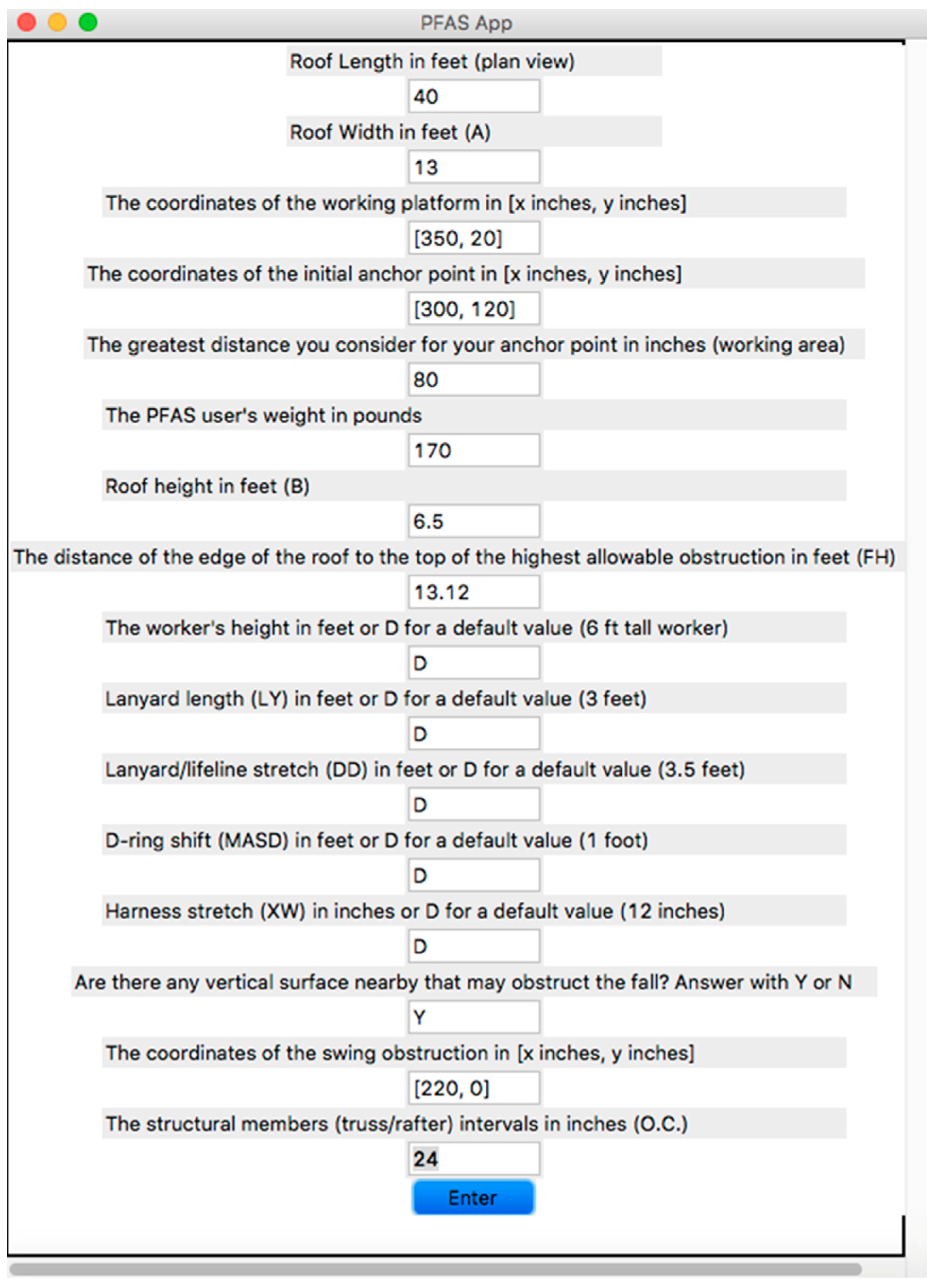
- Entering the project-specific values for the parameters requested in each command line in the user input panel (see Figure 7);
- Running the optimization process by clicking on Enter button (see Figure 7);
- Saving the output results as a report for future reference.
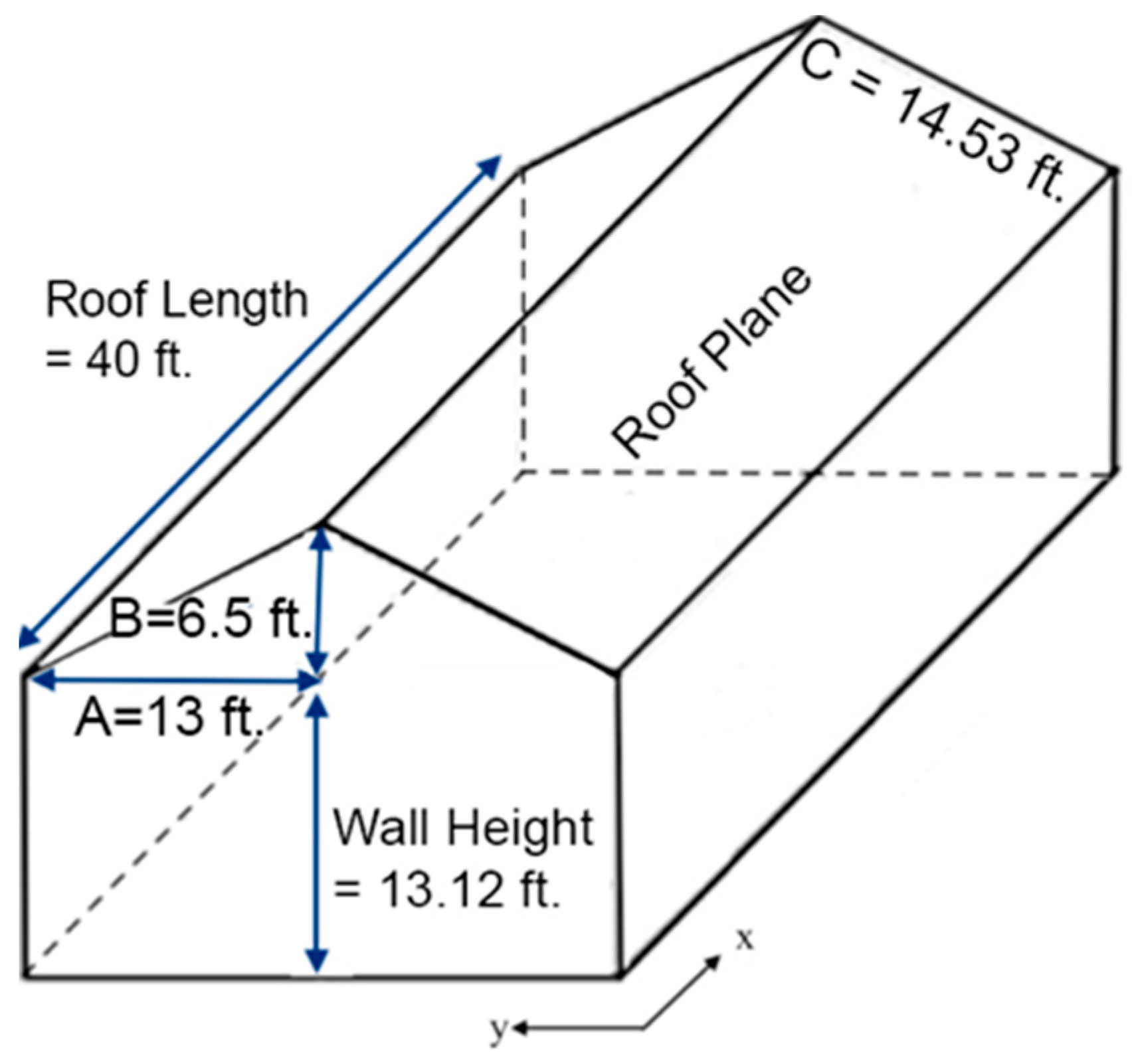
- Building dimensions (e.g., roof height B), distance between structural members (e.g., trusses or rafters) and suggested locations for the working platform as well as the potential location of the initial anchor point,
- PFAS specifications (e.g., lanyard length, harness stretch, etc.),
- Worker information (e.g., worker weight and height) and
- Location of physical barriers (e.g., a chimney).
- Maximum number of PFAS users = one user (that is, only one worker can be attached to the anchor; this is the most common type of PFAS used on projects);
- Maximum arrest force (FCLR) = 1800 lbs.;
- Maximum arrest load = 5000 lbs.;
- Stretch-out of the harness = 1 ft.;
- Clearance margin (CM) = 2 ft.;
- Maximum deceleration distance = 3.5 ft.;
- D-ring shift (MASD) = 1 ft.;
- D-ring height (HI) = 5 ft. for 6 ft. tall workers;
- XZ = straightening of the worker (ft.) + harness stretch (XW) (ft.) = 1 ft.;
- Maximum deployment of shock absorber = 42 inches;
- Self-retracting device; fall arrest force:
- o
- Class A: 1350 lbs.
- o
- Class B: 900 lbs.
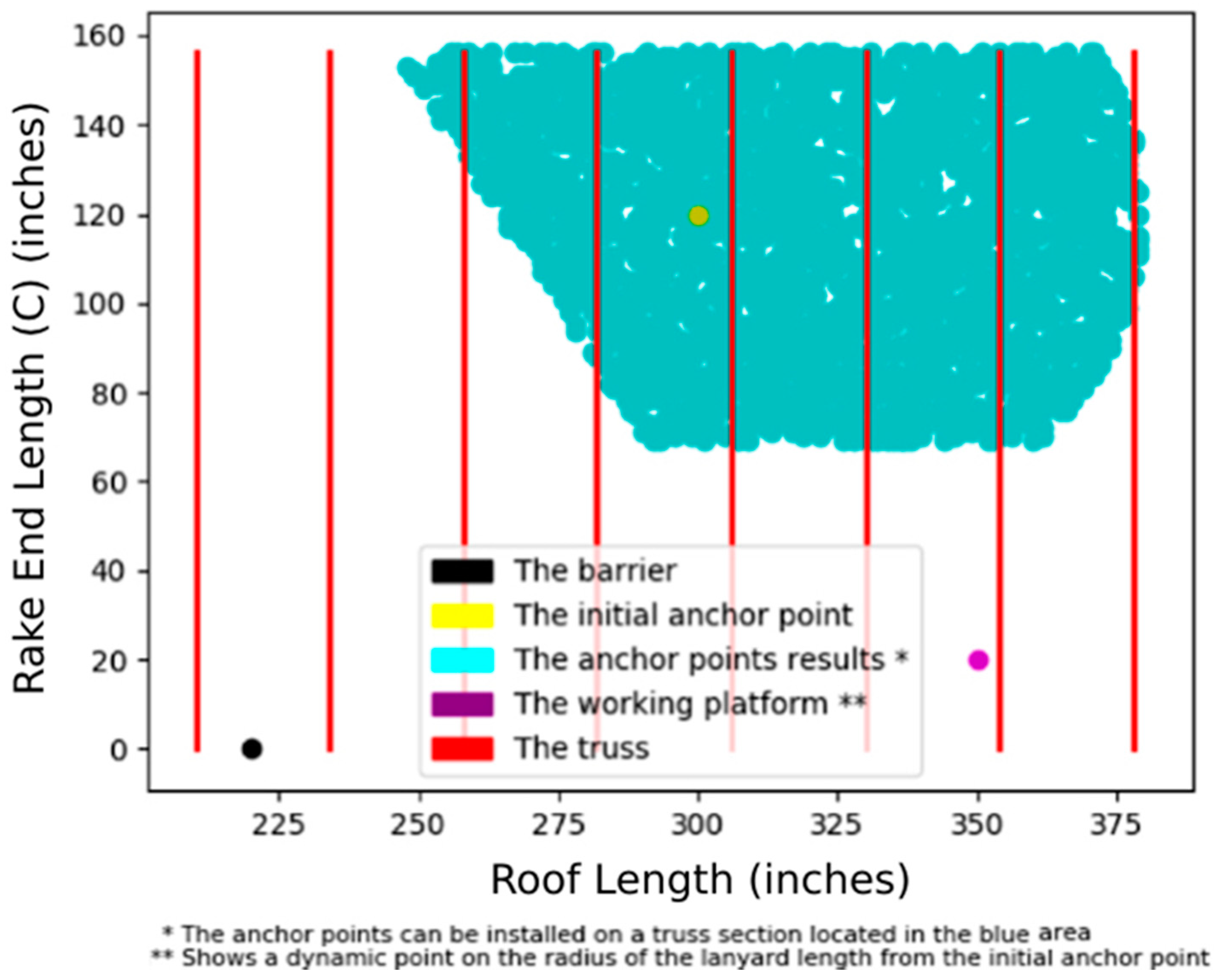
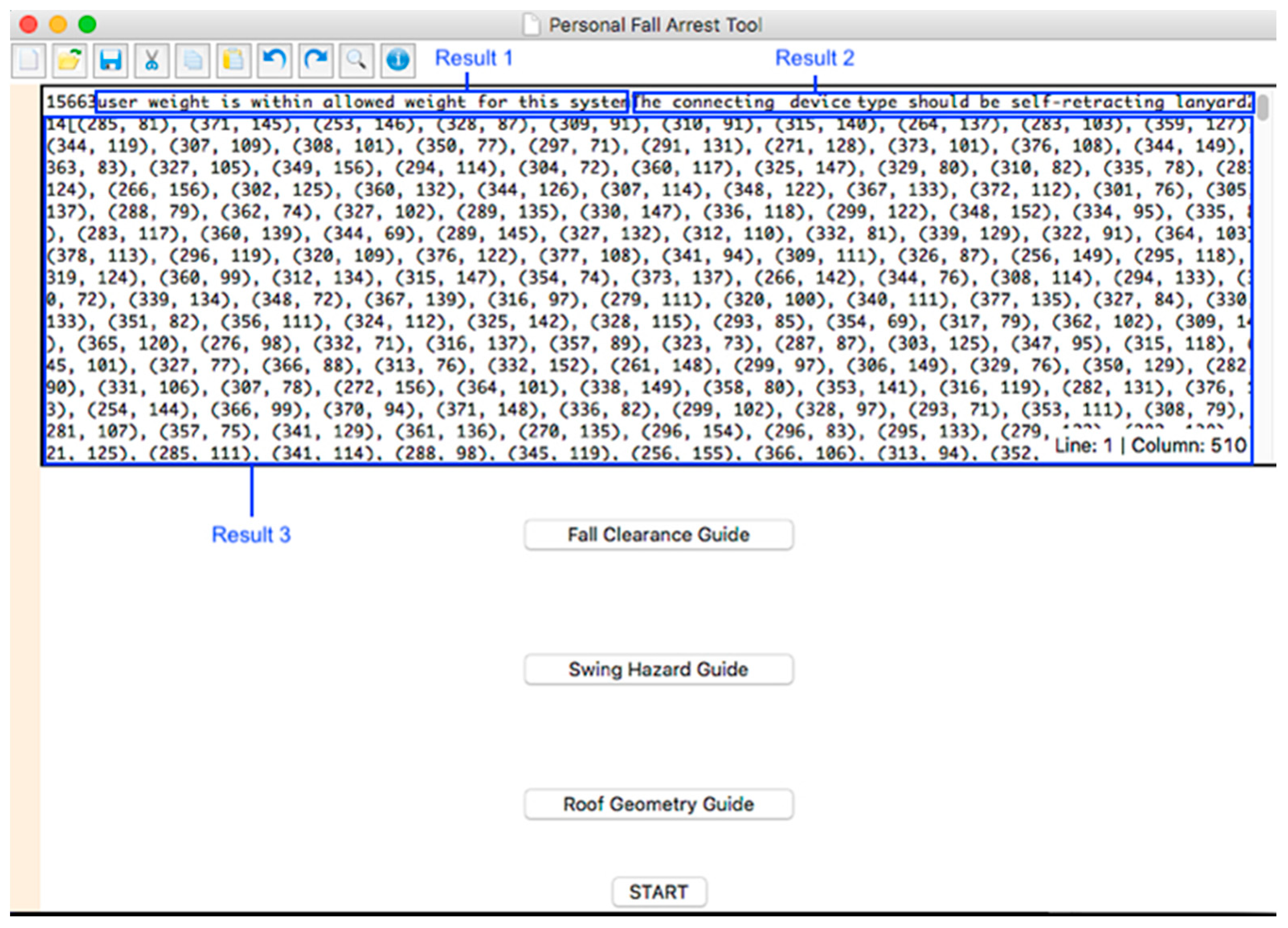
- The anchor points within the PFAS user’s working area that satisfy fall clearance and swing hazard requirements.
- The type of deceleration device that should be used (e.g., self-retracting lanyard, shock absorber, etc.).
4.5. Testing the Optimization Algorithm and the Tool for PFAS Anchor Positioning
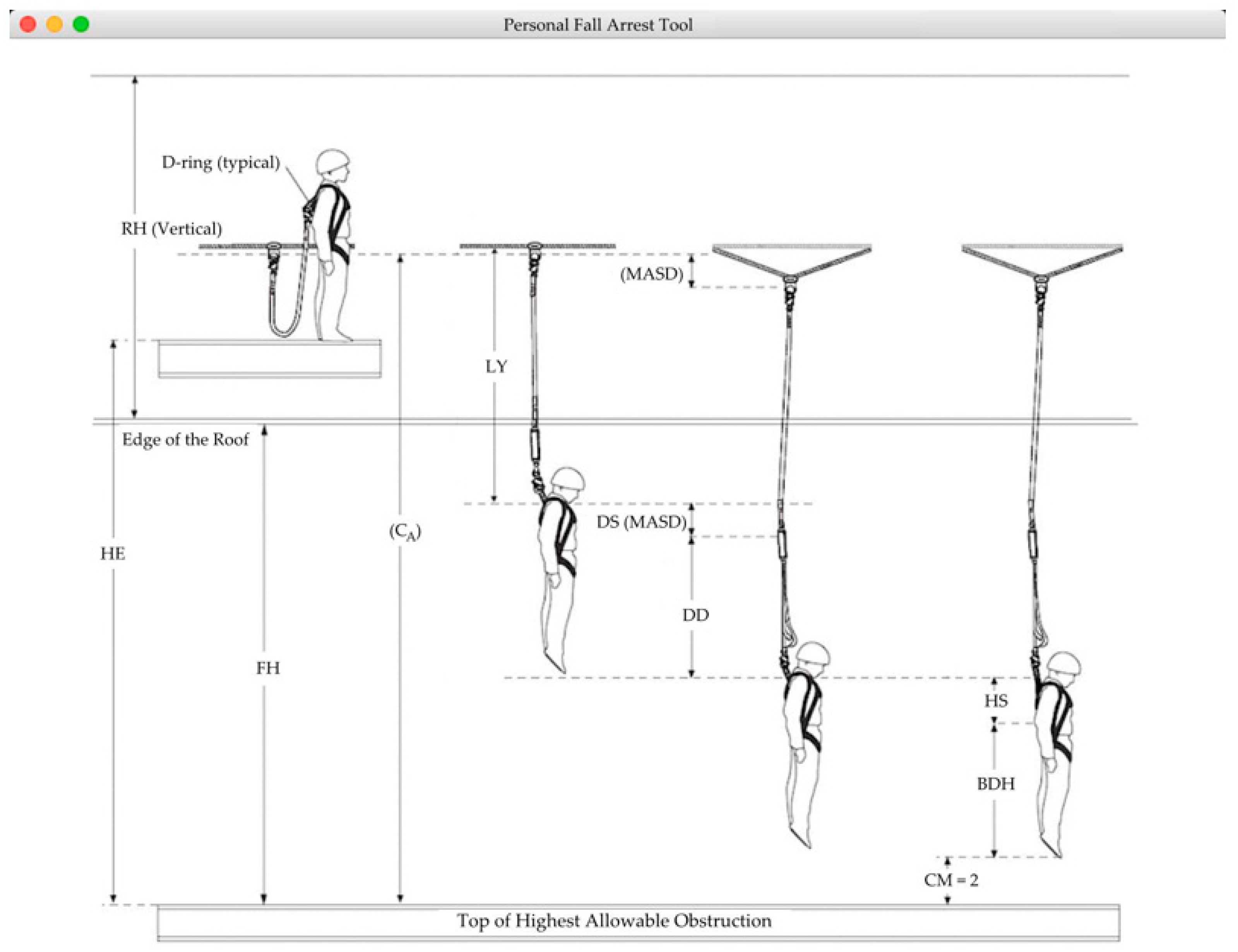
- CA = Required clearance below the anchorage (ft.)
- LY = Lanyard length (Default Value (DV) = 3 ft.)
- DD = Lanyard/lifeline stretch (DV = 3.5 ft.)
- MASD = D-ring shift (DV = 1 ft.)
- HI = Back D-ring height (DV = 5 ft.)
- XW = Harness stretch (DV = 1 ft.)
- CM = Clearance margin (DV = 2 ft.).
- FF = Free fall distance (ft.)
- FFA = Free fall due to the activation distance of the fall arrester (to lock onto the vertical lifeline) (ft.)
- HDA = Vertical distance from the D-ring to where the lanyard connects to the anchorage connector (HDA is negative if the D-ring is initially below the fall arrestor) (ft.)
- LY = Lanyard length (DV = 3 ft.)
- FF = − (6 − 6.5) + 3 = 3.5 ft.
4.6. Validation of the Algorithm for Optimizing PFAS Anchor Positioning
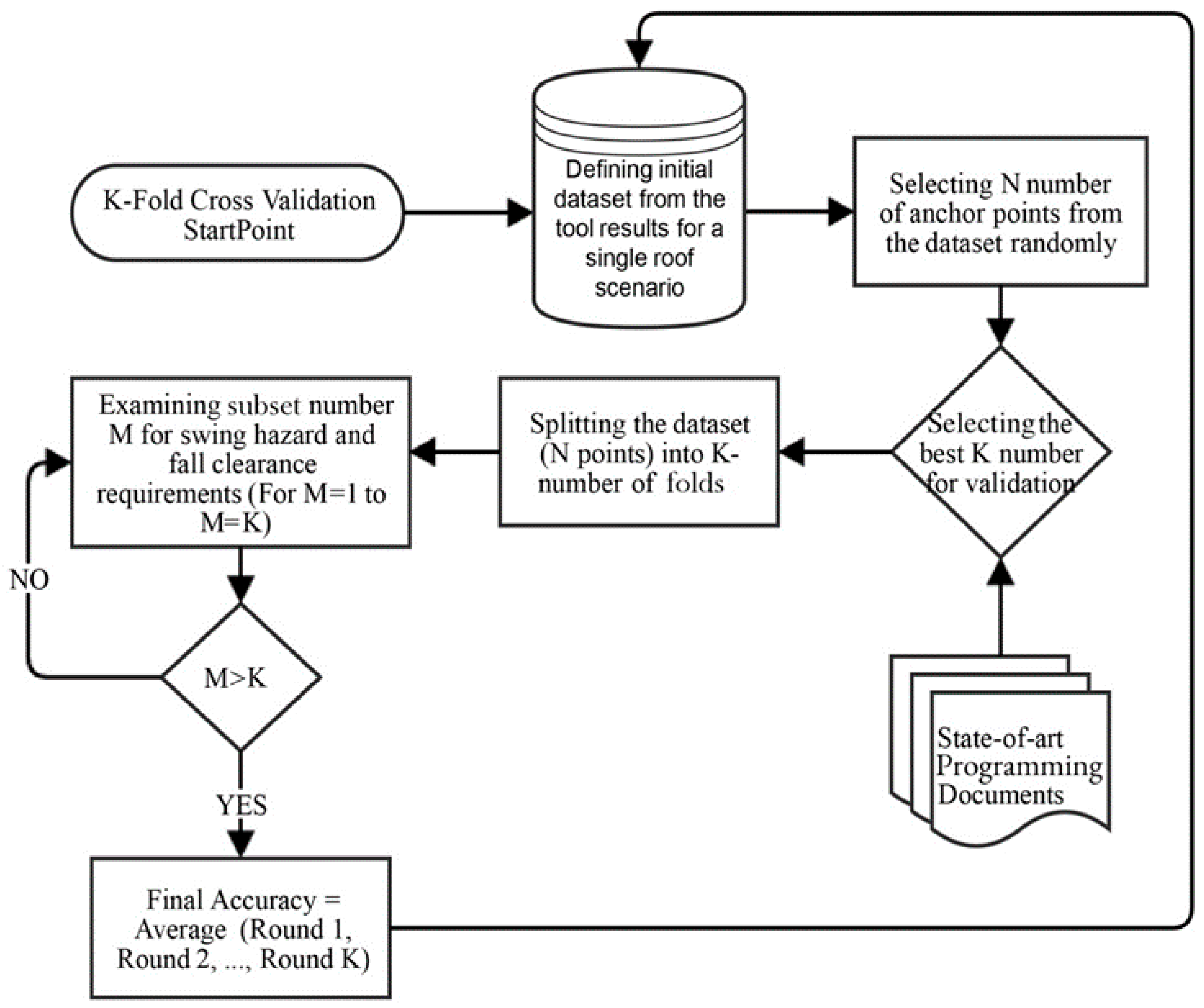
- In the first step, an initial dataset for the validation was defined by running the algorithm for the roof scenario presented in the paper sub-Section 4.5. This dataset included 2481 anchor points that were the simulation output results for this roof scenario.
- In the next step, 200 anchor points (n = 200) were randomly selected from the initial dataset of 2481 anchor points. The selection of the number n was based on the logical ratio between K and n where K is defined as number of folds.
- The number of folds K was then selected based on the literature review. Several previous K-fold Cross-validation studies were investigated to make a decision about the number of folds K, for example, see Python for Engineers [52]. Since the value of K should statistically represent the initial dataset, experimentation showed that five number of folds (K = 5) generally create proper results [53].
- In the next step, the dataset containing 200 anchor points (n = 200) was partitioned into five equal subsets (K = 5). Each subset had, therefore, 40 points and each subset (called a fold) was named as f1, f2, …, fK (i.e., S1, S2, S3, S4, and S5).
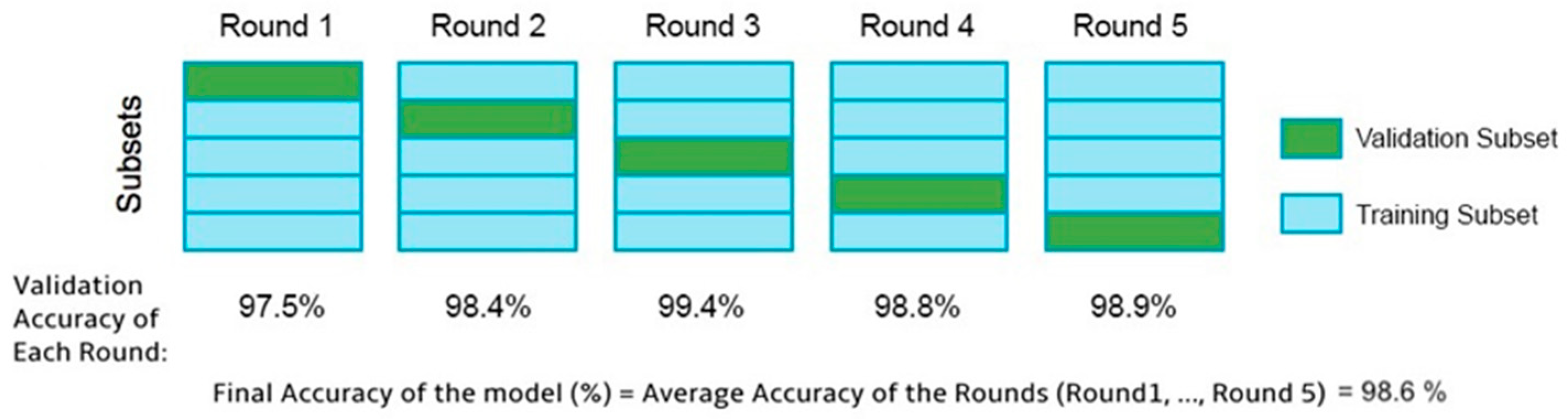
- At this stage, five rounds of validation were carried out (see Figure 12). The number of rounds was selected based on the number of folds, that is, in this research the number of folds and the number of rounds were the same (i.e., five). In each round, for M = 1 to M = K (where M = number of loop in programming language), the fold fM was used as the validation set and the remaining four folds (i.e., K-1 folds) were used as a training set. In this research, training the optimization algorithm means developing the results of the validation subset based on the results of the training subsets. For example, in Round 1, the subset S1 was used as the validation subset, and the subsets S2-S5 were used as the training sets. In summary, the optimization algorithm was trained using four folds as the training subsets, after which the validation subset was evaluated. This was all done through a loop of examining fall clearance and swing hazard for five subsets of anchor points (where M = number of subset; values of M = 1 to M = K) in each of five rounds with subset content varying in each round. This validation method required developing a rule-checking Python script for each anchor point entry and was done through loops of rule-checking statements. Each of the criteria in the rule-checking (i.e., type of deceleration device, fall clearance, and swing hazard verification) was given a numerical weight (which is internally selected by the validation code) and the automated validation code calculated the accuracy ratios for each of the five subsets based on these weighted criteria.
- Using the training and validation subsets in each round, the optimization of points was completed, and the accuracy of the algorithm was calculated by comparing the training results with the validation set. The accuracy percentage of the anchor points in one subset was calculated as a ratio of correct anchor points to all anchor points in a subset. The accuracy percentage of each round was then calculated by averaging accuracies of all five subsets in that specific round. For example, in Round 1, validation accuracy was 97.5%, which means that 97.5% of the anchor point results satisfied both fall clearance and swing hazard requirements. Therefore, 97.5% comes from all five subset accuracy percentages in Round 1.
- The final accuracy of the optimization algorithm was then calculated by averaging the accuracies of the five rounds of K-fold Cross Validation (see Figure 12). The results showed that 98.6% of the output results (that is, anchor points) satisfied all the fall clearance and swing hazard requirements and that there was a 1.4% error pertaining to the results that did not satisfy the swing hazard requirement. In other words, three out of 200 anchor points or 1.4% of points had some error pertaining to the swing hazard calculations. We expect that the error happened due to the complexity of swing hazard situations. For this reason, the algorithm might have incorrectly assumed the direction in which swing would happen in these three cases.
5. Conclusions
6. Research Limitations, Delimitations and Future Research
- The KNNS optimization algorithm was at first intended to start the optimization with 10 iterations of 8000 population data sets, but due to the capacity limitations of the CPU and memory, the optimization happened at two iterations of 8000 population data sets.
- The goal was to create a user-friendly tool. A highly graphical user interface was partly achieved with the use of TkInter and Matplotlib modules but most of the Python modules used were unable to depict the calculations in a graphical way. Therefore, the problem remained partially unsolved.
- Only the basic PFAS type was examined, that is, PFAS for a single worker weighing between 130 and 310 pounds equipped with a deceleration device, a full body harness, a lanyard and one rigid anchor point. Other PFAS types (e.g., horizontal lifeline with multiple users PFAS) were not investigated;
- The study focused only on falls of construction workers. Other fall-related hazards such as struck-by falling objects were out of scope of this research;
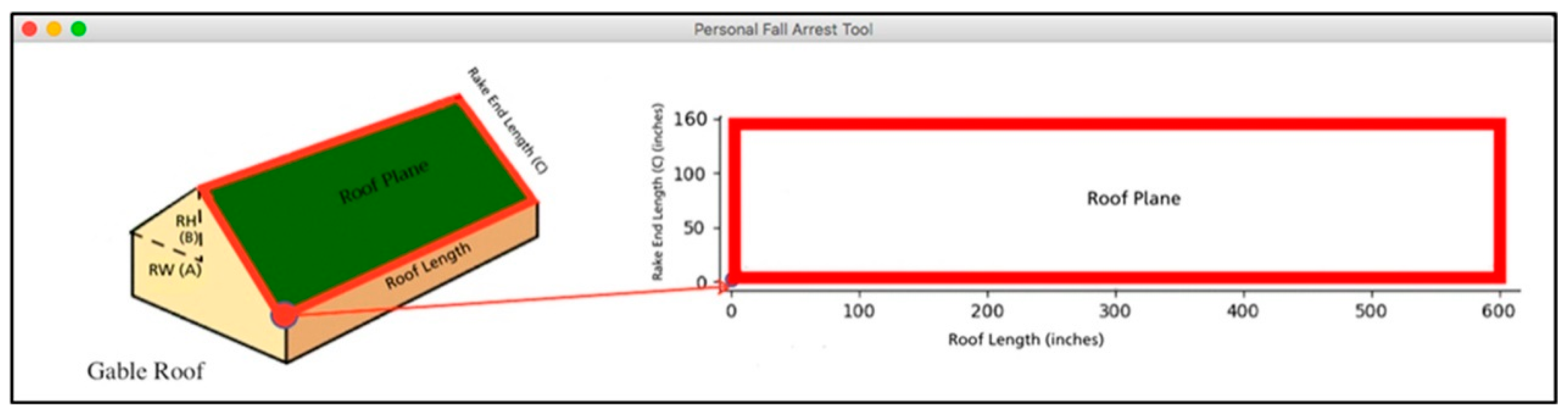
- Only a simple roof geometry such as a single slope gable roof was considered in this study in order to demonstrate the development of the optimization algorithm and a tool, APP in this case, which are beneficial to the safety of construction workers. In other words, the gable roof was used as an example to demonstrate the methodology and the tool development. Thus, the results of this study may not be applicable to other roof geometries unless they are broken into individual component slope areas representing the single slope portion of a gable roof used in this study;
- Only a single physical barrier as an example of swing hazard was used for the tool development and to proof the concept of this research;
- The structural calculations were not included in the optimization model because the U.S. OSHA requires the strength calculations to be performed by a structural engineer, that is, by a human and not a computer tool;
- Only U.S. OSHA and ANSI safety standards and regulations were used. The research methodology could be utilized to include other countries’ fall protection regulations too.
- The British Imperial System of units is used in the tool for both input and output values since the U.S. OSHA regulations that were integrated into the tool also utilize these units. In addition, we utilized Imperial Units since we aim to pilot-test the tool with companies in the U.S. that use Imperial Units. Use of different safety standards and regulations that are country specific and use of SI units is possible if the study methodology is to be replicated for different countries and regions;
- The aesthetics of anchor points installed on roofs were not considered;
- Financial feasibility of developing and using the tool was out of scope of this study.
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Conflicts of Interest
References
- Bureau of Labor Statistics. Economic News Release. Table 3. Fatal Occupational Injuries Counts and Rates for Selected Occupations 2017–2018. Available online: https://www.bls.gov/news.release/cfoi.t03.htm (accessed on 24 December 2020).
- Bureau of Labor Statistics. Economic News Release. Census of Fatal Occupational Injuries Summary. 2018. Available online: https://www.bls.gov/news.release/cfoi.nr0.htm (accessed on 15 November 2019).
- Bureau of Labor Statistics. Injuries, Illnesses, and Fatalities. Table A-9. Fatal Occupational Injuries by Event or Exposure for All Fatal Injuries and Major Private Industry Sector, all United States. 2018. Available online: https://www.bls.gov/iif/oshwc/cfoi/cftb0330.htm (accessed on 24 December 2020).
- Occupational Health and Safety Statistics 2019; Labour Department, The Government of Hong Kong Special Administrative Region: Hong Kong, China, 2020.
- Commonly Used Statistics, Top. 10 Most Frequently Cited OSHA Standards Violated in FY2019; Occupational Safety and Health Administration (OSHA): Washington, DC, USA, 2019.
- The Construction Chart Book: The U.S. Construction Industry and its Workers, 6th ed.; The Center for Construction Research and Training: Silver Spring, MD, USA, 2018; pp. 1–74.
- Chi, C.F.; Chang, T.C.; Ting, H.I. Accident patterns and prevention measures for fatal occupational falls in the construction industry. Appl. Ergon. 2005, 36, 391–400. [Google Scholar] [CrossRef] [PubMed]
- Hu, K.; Rahmandad, H.; Smith-Jackson, T.; Winchester, W. Factors influencing the risk of falls in the construction industry: A review of the evidence. Constr. Manag. Econ. 2011, 29, 397–416. [Google Scholar] [CrossRef]
- Dong, X.S.; Largay, J.A.; Choi, S.D.; Wang, X.; Cain, C.T.; Romano, N. Fatal falls and PFAS use in the construction industry: Findings from the NIOSH FACE reports. Accid. Anal. Prev. 2017, 102, 136–143. [Google Scholar] [CrossRef] [Green Version]
- Hinze, W.J.; Olbina, S. Problem areas in personal fall protection. In Proceedings of the 14th Rinker International Conference CIB W99 Evolution of and Directions in Construction Safety and Health, Gainesville, FL, USA, 9–11 March 2008; pp. 406–418. [Google Scholar]
- Perry, M.J.; McQueen, A.; Kim, S. Evaluating Fall Safety Compliance Among Skilled Trades in Construction; Small Study Final Report; CPWR: Silver Spring, MD, USA, 2015. [Google Scholar]
- Duty to Have Fall Protection; 29 CFR 1926.501; Occupational Safety and Health Administration (OSHA): Washington, DC, USA, 2015.
- Yiu, N.S.; Chan, D.W.; Sze, N.; Shan, M.; Chan, A.P. Implementation of Safety Management System for Improving Construction Safety Performance: A Structural Equation Modelling Approach. Buildings 2019, 9, 89. [Google Scholar] [CrossRef] [Green Version]
- Specifications and Design Requirements for Active Fall Protection Systems; ASSE Z359.6; American National Standards Institute (ANSI): Washington, DC, USA, 2016.
- Standard 1926.32–Definitions; Occupational Safety and Health Administration (OSHA): Washington, DC, USA, 1993.
- Fang, Q.; Li, H.; Luob, X.; Dinga, L.; Luoa, H.; Lia, C. Computer vision aided inspection on falling prevention measures for steeplejacks in an aerial environment. Autom. Constr. 2018, 93, 148–164. [Google Scholar] [CrossRef]
- Costin, A.M.; Teizer, J.; Schoner, B. RFID and BIM-enabled worker location tracking to support real-time building protocol and data visualization. J. Inf. Technol. Constr. 2015, 20, 495–517. [Google Scholar]
- Domingos, P. The Master Algorithm: How the Quest for the Ultimate Learning Machine Will Remake Our World, 1st ed.; Basic Books, Hachette Book Group: New York, NY, USA, 2015. [Google Scholar]
- Huang, X.; Hinze, J. Analysis of construction worker fall accidents. J. Constr. Eng. Manag. 2003, 129, 262–271. [Google Scholar] [CrossRef]
- Cable, J. ASSE: Are You a “Self-Interpreter” of OSHA Fall Protection Standards? Available online: https://www.ehstoday.com/ppe/fall-protection/article/21910020/asse-are-you-a-selfinterpreter-of-osha-fall-protection-standards (accessed on 24 December 2020).
- Stromme, M.H. Five Fall Protection Myths: Clear up Construction Industry Misconceptions. Available online: https://www.ishn.com/articles/91777-5-fall-protection-myths- (accessed on 24 December 2020).
- Johnson, B. Bad Timing for New OSHA Rules on Fall Protection? Available online: https://finance-commerce.com/2011/06/bad-timing-for-new-osha-rules/ (accessed on 24 December 2020).
- OSHA Technical Manual; Occupational Safety and Health Administration (OSHA): Washington, DC, USA, 2016.
- Roofing Industry Fall Protection from A to Z; National Roofing Contractors Association (NRCA): Rosemont, IL, USA, 2011.
- Johnson, H.M.; Singh, A.; Young, R.H.F. Fall protection analysis for workers on residential roofs. J. Constr. Eng. Manag. 1998, 124, 418–428. [Google Scholar] [CrossRef]
- Teizer, J.; Allread, B.S.; Fullerton, C.E.; Hinze, J. Autonomous pro-active real-time construction worker and equipment operator proximity safety alert system. Autom. Constr. 2010, 19, 630–640. [Google Scholar] [CrossRef]
- Zhang, S.; Teizer, J.; Lee, J.K.; Eastman, C.M.; Venugopal, M. Building information modeling (BIM) and safety: Automatic safety checking of construction models and schedules. Autom. Constr. 2013, 29, 183–195. [Google Scholar] [CrossRef]
- Teizer, J. 3D range imaging camera sensing for active safety in construction. J. Inf. Technol. Constr. 2008, 13, 103–117. [Google Scholar]
- Navon, R.; Kolton, O. Algorithms for automated monitoring and control of fall hazards. J. Comput. Civ. Eng. 2007, 21, 21–28. [Google Scholar] [CrossRef]
- Wang, J.; Zhang, S.; Teizer, J. Geotechnical and safety protective equipment planning using range point cloud data and rule checking in building information modeling. Autom. Constr. 2015, 49, 250–261. [Google Scholar] [CrossRef]
- Malekitabar, H.; Ardeshir, A.; Sebt, M.H.; Stouffs, R. Construction safety risk drivers: A BIM approach. Saf. Sci. 2016, 82, 445–455. [Google Scholar] [CrossRef]
- Solihin, W.; Eastman, C. Classification of rules for automated BIM rule checking development. Autom. Constr. 2015, 53, 69–82. [Google Scholar] [CrossRef]
- Benjaoran, V.; Bhokha, S. An integrated safety management with construction management using 4D CAD model. Saf. Sci. 2010, 48, 395–403. [Google Scholar] [CrossRef]
- Qi, J.; Issa, R.R.; Olbina, S.; Hinze, J. Use of building information modeling in design to prevent construction worker falls. J. Comput. Civ. Eng. 2013, 28, 1–10. [Google Scholar] [CrossRef]
- Zhang, S.; Sulankivi, K.; Kiviniemi, M.; Romo, I.; Eastman, C.M.; Teizer, J. BIM-based fall hazard identification and prevention in construction safety planning. Saf. Sci. 2015, 72, 31–45. [Google Scholar] [CrossRef]
- Mistikoglu, G.; Gerek, I.H.; Erdis, E.; Usmen, P.M.; Cakan, H.; Kazan, E.E. Decision tree analysis of construction fall accidents involving roofers. Expert Syst. Appl. 2015, 42, 2256–2263. [Google Scholar] [CrossRef]
- Guo, B.H.W.; Goh, Y.M. Ontology for design of active fall protection systems. Autom. Constr. 2017, 82, 138–153. [Google Scholar] [CrossRef]
- Nguyen, L.D.; Tran, D.Q.; Chandrawinata, M.P. Predicting safety risk of working at heights using Bayesian networks. J. Constr. Eng. Manag. 2016, 142, 1–11. [Google Scholar] [CrossRef]
- Wang, T.K.; Qin, C. Integration of BIM, Bayesian Belief network, and ant colony algorithm for assessing fall risk and route planning. In Proceedings of the 2018 Construction Research Congress, New Orleans, LA, USA, 2–4 April 2018; pp. 207–220. [Google Scholar]
- Creswell, J.W. Educational Research: Planning, Conducting, and Evaluating Quantitative and Qualitative Research, 6th ed.; Pearson: Lincoln, NE, USA, 2013. [Google Scholar]
- Safety Requirements for Anchorage Connectors for Active Fall Protection Systems; ASSE Z359.18; American National Standards Institute (ANSI): Washington, DC, USA, 2017.
- Requirements for a Comprehensive Managed Fall Protection Program; ASSE Z359.2; American National Standards Institute (ANSI): Washington, DC, USA, 2017.
- Subpart M App C, Personal Fall Arrest Systems—Non-Mandatory Guidelines for Complying with 1926.502(d); 1926.502; Occupational Safety and Health Administration (OSHA): Washington, DC, USA, 2015.
- Dhillon, I.S.; Modha, D.S. A data-clustering algorithm on distributed memory multiprocessors. Large-Scale Parallel Data Mining. In Lecture Notes in Computer Science; Zaki, M.J., Ho, C.T., Eds.; Springer: Berlin, Germany, 2002; Volume 1759, pp. 245–260. [Google Scholar]
- Graupe, D. Principles of Artificial Neural Networks, 3rd ed.; World Scientific Publishers: Singapore, 2013. [Google Scholar]
- Altman, N.S. An introduction to kernel and nearest-neighbor nonparametric regression. Am. Stat. 1992, 46, 175–185. [Google Scholar] [CrossRef] [Green Version]
- 1910.21 Occupational Health and Safety Standards, Subpart Walking-Working Surfaces, Scope and Definitions; Occupational Safety and Health Administration (OSHA): Washington, DC, USA, 2016.
- Hu, Y.; Ma, P.; Yang, M.; Wang, Z. A consistency test method for simulation data considering shape and distance of series. In Part I Communications in Computer and Information Science, Proceedings of the Asia Simulation Conference, Shanghai, China, 27–30 October 2012; Xiao, T., Zhang, L., Fei, M., Eds.; Springer: Berlin, Germany, 2012. [Google Scholar]
- Dasarathy, B.V. Nearest Neighbor ({NN}) Norms: {NN} Pattern Classification Techniques; IEEE Computer Society Press: Michigan, MI, USA, 1991. [Google Scholar]
- Stehman, S.V. Selecting and interpreting measures of thematic classification accuracy. Remote Sens. Environ. 1997, 62, 77–89. [Google Scholar] [CrossRef]
- Kuhn, M.; Johnson, K. Applied Predictive Modelling; Springer: New York, NY, USA, 2013. [Google Scholar]
- Python for Engineers. Cross Validation and Model Selection. Available online: https://www.pythonforengineers.com/cross-validation-and-model-selection/ (accessed on 24 December 2020).
- Brownlee, J. A Gentle Introduction to K-Fold Cross-Validation. Available online: https://machinelearningmastery.com/k-fold-cross-validation/ (accessed on 24 December 2020).














{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Research Phase | Research Objectives | Research Methods | Programming Language/Tool Used | Function of the Programming Language/Tool | |
|---|---|---|---|---|---|
| 1 | Developing a rule-set algorithm | (a) Defining a set of rules for positioning the anchor points in PFAS | Examining the construction worker safety standards and regulations and converting them into machine-readable rules | N/A | N/A |
| (b) Examining the rules for various scenarios | Rule-checking of fall clearance and fall swing | Manual calculations | Developing a rule-set to be used as a database for the optimization algorithm and the automated tool | ||
| 2 | Developing an optimization algorithm | Determining the decision matrix that consists of decision variables, constrains and objective | KNNS optimization algorithm | N/A | |
| 3 | Developing an automated tool for anchor positioning in form of a Windows-based computer application | Implementing KNNS optimization algorithm into an independent tool using computer programming | Python and various Python modules such as Numpy, TkInter, Sympy, Mathplotlib, Math and Pil | Developing a computer program with a simple user-friendly interface/GUI | |
| Testing the algorithm and the tool for 20 different scenarios | Tool calculations and manual calculations | N/A | |||
| 4 | Validating the optimization algorithm | Selecting the proper method for validating the optimization algorithm and performing the validation | K-fold Cross-Validation | N/A | |
| OSHA Regulations | The Research Interpretation of the Rules | |||
|---|---|---|---|---|
| OSHA Clause Number | OSHA Requirements | Clause Description | Fall Protection Area | Questions |
| Title 29 Code of Federal Regulations (CFR) Subpart M–Fall Protection, 29 CFR 1926.501(b)(11) 1926.502(d)(16)(iii) | Guardrail systems with toe-boards, safety net systems, or PFAS | PFAS, when stopping a fall, shall be rigged such that an employee can neither free fall more than 6 feet (1.8 m), nor contact any lower level | A steep roof with unprotected sides and edges 6 feet (1.8 m) or more above lower level |
|
| OSHA subpart M 1926.502(d)(23) | PFAS structural requirements for anchors | PFAS shall not be attached to guardrail systems, standard railings, ladders, scaffolding, light fixtures, conduit or plumbing, ductwork or pipe vents, or any item or structure not capable of meeting OSHA structural load requirements. | A steep roof with unprotected sides and edges 6 feet (1.8 m) or more above lower level |
|
| Category | Specifications |
|---|---|
| Operating System | Windows 10 |
| Memory | 16 GB |
| CPU | Intel(R) Core i7-6700 3.40 GHz |
| Tool Launch Time | 5.50 s |
| Average Computation Time | 71.81 s |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2020 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Heidari, A.; Olbina, S.; Glick, S. Automated Positioning of Anchors for Personal Fall Arrest Systems for Steep-Sloped Roofs. Buildings 2021, 11, 10. https://doi.org/10.3390/buildings11010010
Heidari A, Olbina S, Glick S. Automated Positioning of Anchors for Personal Fall Arrest Systems for Steep-Sloped Roofs. Buildings. 2021; 11(1):10. https://doi.org/10.3390/buildings11010010
Chicago/Turabian StyleHeidari, Azin, Svetlana Olbina, and Scott Glick. 2021. "Automated Positioning of Anchors for Personal Fall Arrest Systems for Steep-Sloped Roofs" Buildings 11, no. 1: 10. https://doi.org/10.3390/buildings11010010
APA StyleHeidari, A., Olbina, S., & Glick, S. (2021). Automated Positioning of Anchors for Personal Fall Arrest Systems for Steep-Sloped Roofs. Buildings, 11(1), 10. https://doi.org/10.3390/buildings11010010