A Simple Framework for the Cost–Benefit Analysis of Single-Task Construction Robots Based on a Case Study of a Cable-Driven Facade Installation Robot

 ,
,  ,
, 

 and
and 
Abstract
:1. Introduction
- Specify the set of alternatives projects.
- Decide who will be the key stakeholder for the benefits and costs.
- List impacts and determine ways to measure them.
- Predict impacts quantitatively over the life of the project.
- Monetize every impact.
- Discount benefits and costs to obtain present values.
- Calculate the net present value of each alternative.
- Perform sensitivity analysis.
- Make a recommendation.
2. Literature Review
3. Methods
3.1. Analytical Framework for the CBA
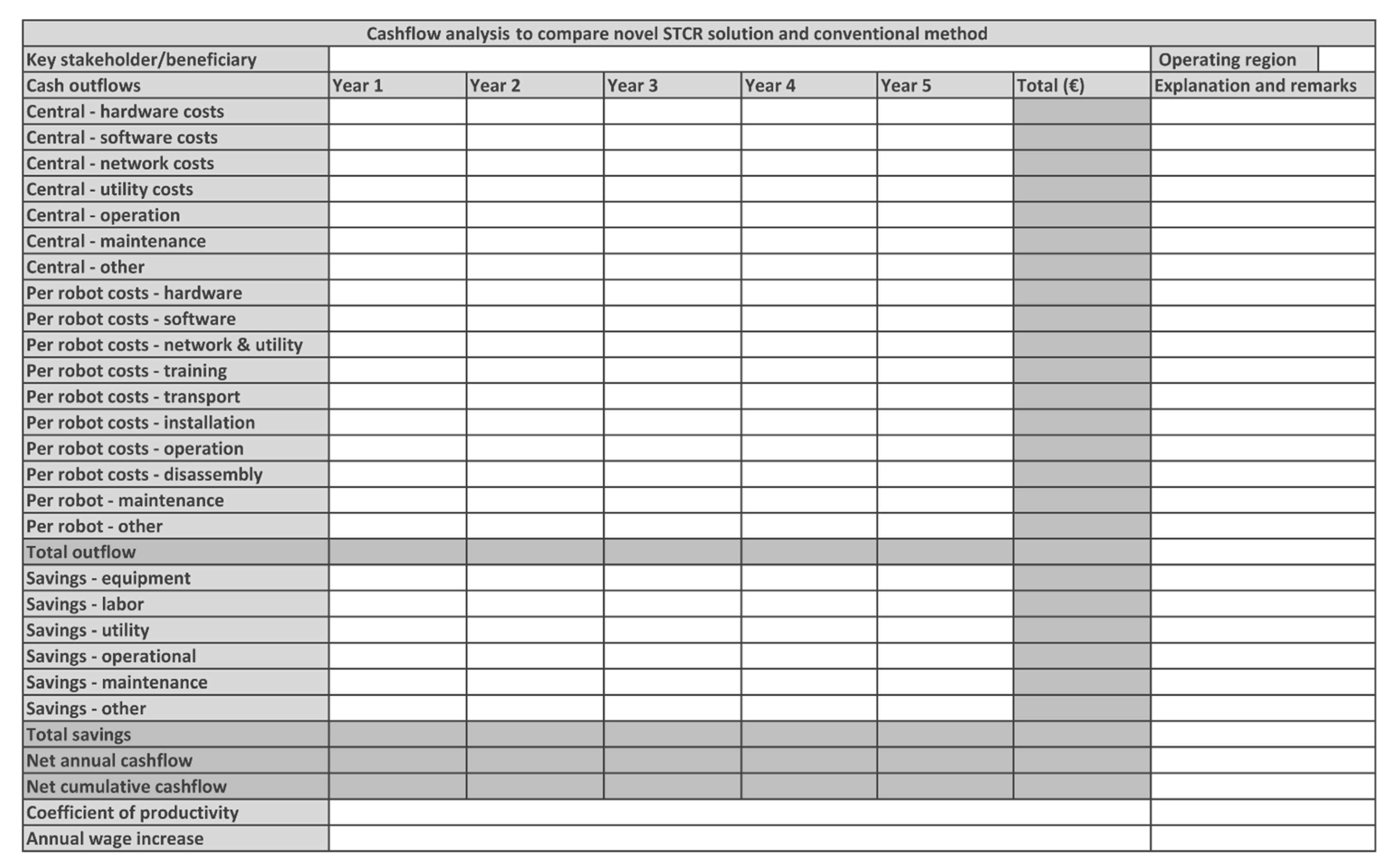
3.2. Cashflow Analysis Table
4. Case Study
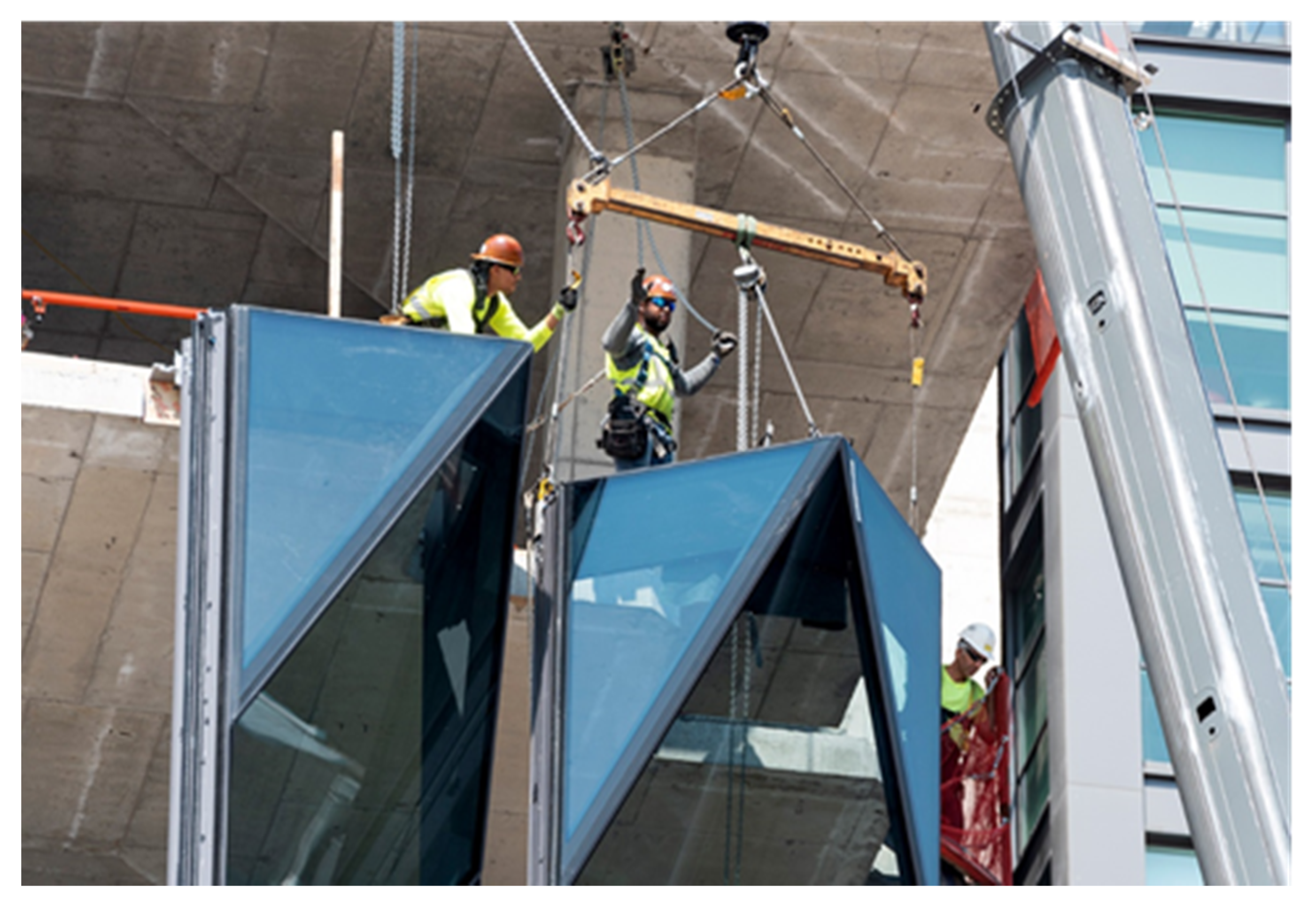
4.1. Curtain Wall Installation Process
4.2. Conventional CWM Installation
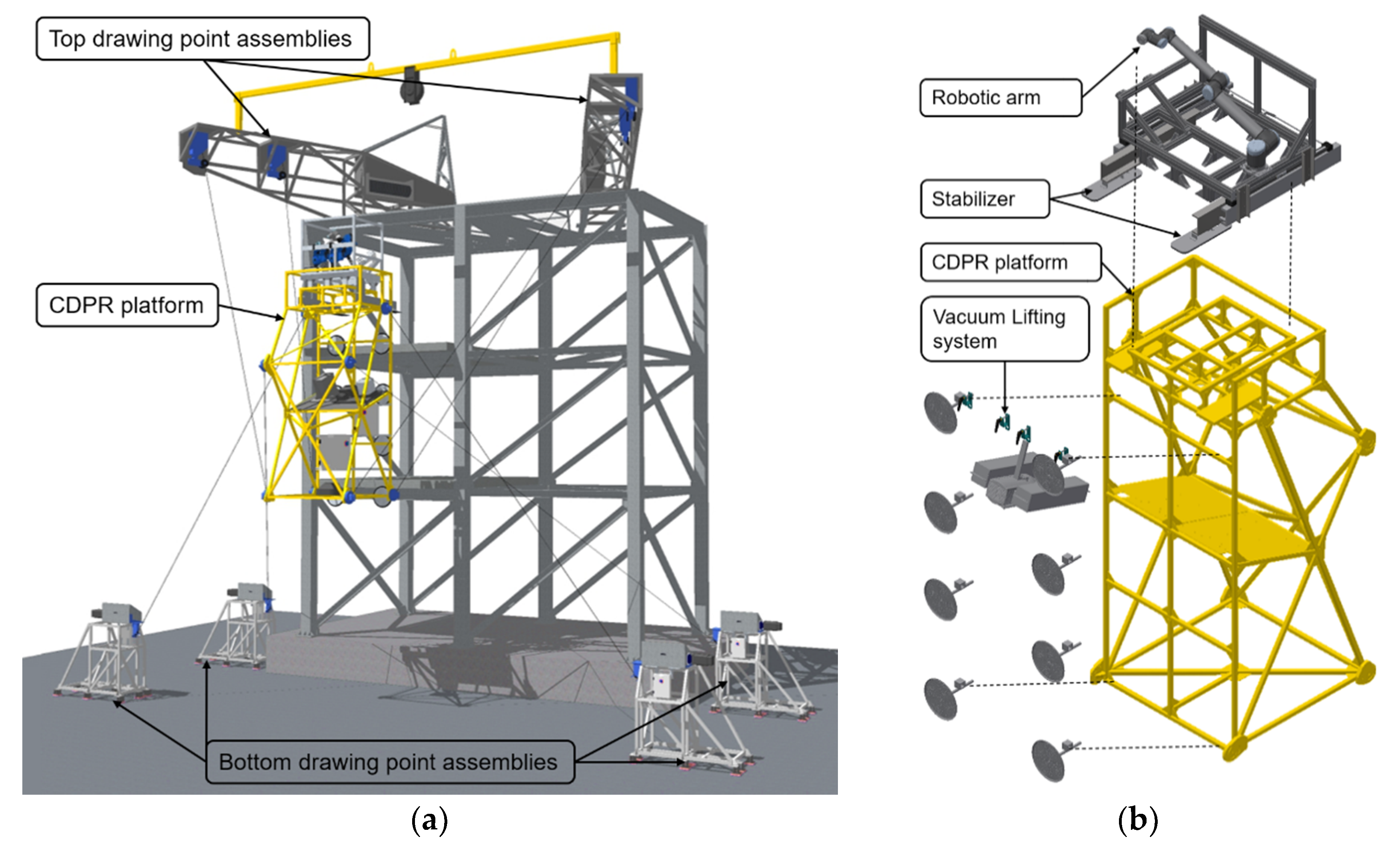
4.3. Automated CWM Installation
4.4. Determining the Scenario for Evaluation
4.5. Gathering Data and Proposing Assumptions for Calculating the Costs of the Conventional and Alternative Scenarios
- The main financial beneficiary is a curtain wall installation company operating in the UK, because the main market of facade installation for the key beneficiary is in the UK.
- For the simplification of calculation, the table uses the median hourly rate of construction workers to calculate all the inputs related to labor costs.
- The estimated cost of the robot system includes manufacturing cost, logistics, administrative cost, and profit.
- The robot system does not cause extra administrative costs, compared to the conventional method.
- A one-month training cost of 12,000 € (3000 €/person) is added, to train four workers for operating the robot system during the downtime of the first year. During the training month, these workers’ salary needs to be covered by the company as well (9900 €). After the training, one worker will become a highly-skilled operator, thus earning 30% more salary than the average worker.
- The annual total saving outputs equal the annual saving inputs multiplied by a productivity weight coefficient of 2.2, which means that the alternative robot system is 2.2 times as productive as the conventional method. Therefore, the productivity weight coefficient needs to be considered in the conventional method to keep up with the productivity of the alternative robot system in order to achieve the same gross revenue for fair comparison.
- Regarding the central cost for the company, this robot system does not require additional special managerial efforts, compared to the conventional scenario. Therefore, central costs are not calculated in both scenarios.
5. Results
5.1. Key Financial Indicators of the Hephaestus Cable Robot
n represents the number of the final year with negative net accumulative cashflow.
- BCR indicates the overall relationship between the relative benefits and costs of a proposed project. In this case study, benefits refer to the money saved by not using the conventional facade installation method, and costs refer to the money spent to operate the robot system. If the value is larger than 1.0, the project is expected to deliver economic satisfaction to its investors.
- ROI is a performance measure used to evaluate the efficiency of an investment.
- PBP is the period of time required to recover the cost of an investment.
- IIV is defined here as the amount of money needed for the total capital expenditures in the first year.
- NPV is the current value of a future stream payments. Here it refers to the present value of the total net accumulative cash flow.
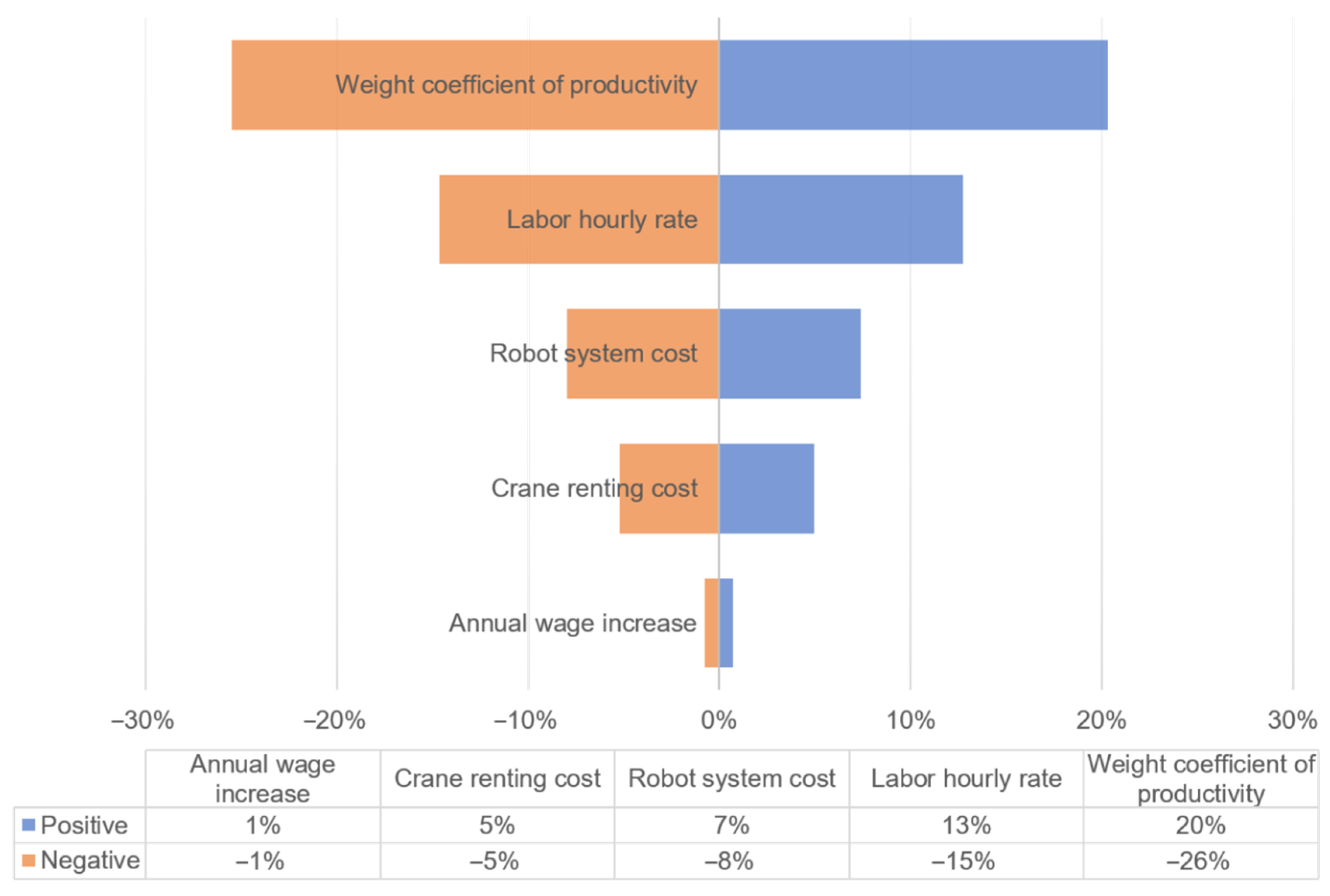
5.2. Sensitivity Analysis
5.3. Recommendations
6. Discussion
6.1. Advantages and Future Validation of the Methods
6.2. Further Socioenvironmental Implications
6.3. Limitations
- The usability of the alternative scenario, currently based on a prototype, needs to be further tested and validated in real-world practice.
- Many data for calculation are only rough estimations, and more accurate data might be possible in the future.
- The manufacturing cost of the robot is only calculated based on prototyping cost in the EU market, thus cheaper alternatives, such as outsourcing, are not considered, and future mass production might be substantially lower.
- Many long-term indirect socioenvironmental benefits are difficult to quantify and monetize. Also, the primary beneficiary in the case study is defined as the facade installation company. Therefore, the indirect socioenvironmental benefits are not included directly in the case study.
6.4. Adaptability and Reproducibility
Author Contributions
Funding
Data Availability Statement
Conflicts of Interest
References
- Cousineau, L.; Miura, N. Construction Robots: The search for New Building Technology in Japan; ACSE Press: Reston, VA, USA, 1998; ISBN 0784403171. [Google Scholar]
- Bock, T.; Linner, T. Construction Robots: Elementary Technologies and Single-Task Construction Robots; Cambridge University Press: Cambridge, UK, 2016; Volume 3, p. 334. [Google Scholar]
- Fodor, B. Estimation of Social Benefits in Cost-benefit Analysis. Theory Methodol. Pract. 2012, 8, 11–16. [Google Scholar]
- Boardman, A.E.; Greenberg, D.H.; Vining, A.R.; Weimer, D.L. Cost-Benefit Analysis: Concepts and Practice, 5th ed.; Cambridge University Press: Cambridge, UK, 2018; ISBN 9781108415996. [Google Scholar]
- Munger, M.C. Analyzing Policy: Choices, Conflicts, and Practices; New Institutionalism in American Politics; W. W. Norton & Company: New York, NY, USA, 2000; ISBN 9780393973990. [Google Scholar]
- Shen, K.; Cheng, C.; Li, X.; Zhang, Z. Environmental Cost-Benefit Analysis of Prefabricated Public Housing in Beijing. Sustainability 2019, 11, 207. [Google Scholar] [CrossRef] [Green Version]
- Li, Z.; Madanu, S. Highway Project Level Life-Cycle Benefit/Cost Analysis under Certainty, Risk, and Uncertainty: Methodology with Case Study. J. Transp. Eng. 2009, 135, 516–526. [Google Scholar] [CrossRef]
- Medici, M.; Lorenzini, G. Mathematical ILP modeling for the optimization of the energy saving in the residential buildings sector. J. Eng. Thermophys. 2014, 23, 201–215. [Google Scholar] [CrossRef]
- Jang, W.-S.; Skibniewski, M. Cost-Benefit Analysis of Embedded Sensor System for Construction Materials Tracking. J. Constr. Eng. Manag. 2009, 135. [Google Scholar] [CrossRef]
- García de Soto, B.; Agustí-Juan, I.; Hunhevicz, J.; Joss, S.; Graser, K.; Habert, G.; Adey, B.T. Productivity of digital fabrication in construction: Cost and time analysis of a robotically built wall. Autom. Constr. 2018, 92, 297–311. [Google Scholar] [CrossRef]
- Kim, T.; Lee, U.; Yoo, W.S.; An, S.; Cho, H.; Lee, Y.; Doh, N. Benefit/cost analysis of a robot-based construction automation system. In Proceedings of the ICCAS 2010, Gyeonggi-do, Korea, 27–30 October 2010; pp. 616–621. [Google Scholar]
- Wang, R.; Kudrot-E-Khuda, M.; Nakamura, F.; Tanaka, S. A Cost-benefit Analysis of Commuter Train Improvement in the Dhaka Metropolitan Area, Bangladesh. Procedia-Soc. Behav. Sci. 2014, 138, 819–829. [Google Scholar] [CrossRef] [Green Version]
- Jones, H.; Moura, F.; Domingos, T. Transport Infrastructure Project Evaluation Using Cost-benefit Analysis. Procedia-Soc. Behav. Sci. 2014, 111, 400–409. [Google Scholar] [CrossRef] [Green Version]
- Herzog, T.; Krippner, R.; Lang, W. Facade Construction Manual, 2nd ed.; DETAIL Business Information GmbH: Munich, Germany, 2017; ISBN 978-3955533694. [Google Scholar]
- Taghavi, M.; Iturralde, K.; Bock, T. Cable-driven parallel robot for curtain wall modules automatic installation. In Proceedings of the 35th International Symposium on Automation and Robotics in Construction (ISARC 2018), Berlin, Germany, 20–25 July 2018. [Google Scholar]
- Falk, J.H.; Augustinson, D.F. Method for Mounting Facade Elements on a Multi-Storey Building. U.S. Patent 8,695,308, 15 April 2015. [Google Scholar]
- Činkelj, J.; Kamnik, R.; Čepon, P.; Mihelj, M.; Munih, M. Closed-loop control of hydraulic telescopic handler. Autom. Constr. 2010, 19, 954–963. [Google Scholar] [CrossRef]
- Iturralde, K.; Linner, T.; Bock, T. Development and preliminary Evaluation of a concept for a Modular End-Effector for automated/robotic Facade Panel Installation in Building Renovation. In Proceedings of the 10th Conference on Advanced Building Skins 2015, Bern, Switzerland, 3–4 November 2015. [Google Scholar]
- Ma, J.; Iturralde, K. ECO—BOX: A system of lightweight vertical urban farming and its robotic assembly & operation process. In Proceedings of the CIB W119 Workshop 2016, Munich, Germany, 27 October 2016; pp. 28–35. [Google Scholar]
- Pan, W.; Bock, T.; Linner, T.; Iturralde, K. Development of a Fast and Effective Solution for On-Site Building Envelope Installation. In Proceedings of the 33rd ISARC (32nd International Symposium on Automation and Robotics in Construction), Auburn, AL, USA, 18–21 July 2016; pp. 805–811. [Google Scholar]
- Ferravante, V.; Riva, E.; Taghavi, M.; Braghin, F.; Bock, T. Dynamic analysis of high precision construction cable-driven parallel robots. Mech. Mach. Theory 2019, 135, 54–64. [Google Scholar] [CrossRef]
- Gouttefarde, M.; Lamaury, J.; Reichert, C.; Bruckmann, T. A Versatile Tension Distribution Algorithm for n -DOF Parallel Robots Driven by n+2 Cables. IEEE Trans. Robot. 2015, 31, 1444–1457. [Google Scholar] [CrossRef] [Green Version]
- Iturralde, K.; Feucht, M.; Hu, R.; Pan, W.; Schlandt, M.; Linner, T.; Bock, T.; Izard, J.-B.; Eskudero, I.; Rodriguez, M.; et al. A Cable Driven Parallel Robot with a Modular End Effector for the Installation of Curtain Wall Modules. In Proceedings of the 37th International Symposium on Automation and Robotics in Construction (ISARC), Kitakyshu, Japan, 27–28 October 2020; pp. 1472–1479. [Google Scholar]
- Pannell, D.J. Sensitivity analysis of normative economic models: Theoretical framework and practical strategies. Agric. Econ. 1997, 16, 139–152. [Google Scholar] [CrossRef]
- Dayananda, D.; Irons, R.; Harrison, S.; Herbohn, J.; Rowland, P. Capital Budgeting: Financial Appraisal of Investment Projects; Cambridge University Press: Cambridge, UK, 2002; ISBN 9781139434874. [Google Scholar]
- Eurostat. Accidents at Work Statistics; Eurostat: Luxembourg, 2020. [Google Scholar]
- European Commission. European Construction Sector Observatory-Analytical Report-Improving the Human Capital Basis-March 2020; European Commission: Brussels, Belgium, 2020. [Google Scholar]











{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Category | Scenario 1 | Scenario 2 |
|---|---|---|
| Name | Hephaestus cable-driven robot | Conventional facade installation |
| Key beneficiary | Facade installation company (Focchi Group UK) | |
| Business model | Owning the robot | Paid based on working area, etc. |
| Primary location for calculation | United Kingdom | |
| Investment period | 5 years (the assumed lifecycle of the robot according to the engineering partners in the project) | |
| Main equipment required | 1 cable-driven robot | 1 crane for positioning |
| Estimated average area per job | 540 m2 (L30 m × H18 m; 1.5 m × 3 m per panel) | |
| Category | Scenario 1 | Scenario 2 |
|---|---|---|
| Name | Hephaestus cable-driven robot | Conventional facade installation |
| Number of workers |
|
|
| Speed/performance |
|
|
| Total time needed per job |
|
|
| Productivity weight coefficient | 1 | 2.20 |
| Jobs finished per year | 14 | 6.36 |
| Downtime per year (e.g., holidays, operational, extreme weather, etc.) | 8 weeks | |
| Median wage of construction worker in the UK | 15.47 € (14.05 GBP) per hour | |
| Annual wage increase | 3% (commonly applied in the construction sector) | |
| Discount rate | 0.1% (in the UK as of October 2020) | |
| Annual equipment maintenance costs | 10% | |
| Key Financial Indicator | Value |
|---|---|
| Benefit–Cost Ratio (BCR) | 1.95 |
| Return on Investment (ROI) | 95.26% |
| Payback Period (PBP) | 21.21 months |
| Initial Investment Value (IIV) | 747,726.86 € |
| Net Present Value (NPV) | 1,205,040.19 € |
| G20 Country or Region | Median Hourly Rate (in €) | Recommendation |
|---|---|---|
| Argentina | 2.19 (198.68 ARS) | Uncompetitive |
| Australia | 18.23 (29.93 AUD) | Highly competitive |
| Brazil | 3.18 (21.07 BRL) | Uncompetitive |
| Canada | 14.93 (23.23 CAD) | Highly competitive |
| China (mainland) | 3.41 (27.25 CNY) | Uncompetitive |
| China (Hong Kong) | 13.01 (118.60 HKD) | Highly competitive |
| France | 14.15 | Highly competitive |
| Germany | 17.18 | Highly competitive |
| India | 1.15 (99.17 INR) | Uncompetitive |
| Indonesia | 3.59 (62053.86 IDR) | Competitive |
| Italy | 13.08 | Highly competitive |
| Japan | 14.66 (1826.55 JPY) | Highly competitive |
| Mexico | 2.41 (60.66 MXN) | Uncompetitive |
| Russia | 2.11 (192.16 RUB) | Uncompetitive |
| Saudi Arabia | 8.69 (38.24 SAR) | Highly competitive |
| South Africa | 3.12 (60.99 ZAR) | Uncompetitive |
| South Korea | 10.18 (13,790.48 KRW) | Highly competitive |
| Turkey | 2.51 (23,41 TRY) | Uncompetitive |
| United Kingdom | 15.47 (14.05 GBP) | Highly competitive |
| United States | 17.28 (20.29 USD) | Highly competitive |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2020 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Hu, R.; Iturralde, K.; Linner, T.; Zhao, C.; Pan, W.; Pracucci, A.; Bock, T. A Simple Framework for the Cost–Benefit Analysis of Single-Task Construction Robots Based on a Case Study of a Cable-Driven Facade Installation Robot. Buildings 2021, 11, 8. https://doi.org/10.3390/buildings11010008
Hu R, Iturralde K, Linner T, Zhao C, Pan W, Pracucci A, Bock T. A Simple Framework for the Cost–Benefit Analysis of Single-Task Construction Robots Based on a Case Study of a Cable-Driven Facade Installation Robot. Buildings. 2021; 11(1):8. https://doi.org/10.3390/buildings11010008
Chicago/Turabian StyleHu, Rongbo, Kepa Iturralde, Thomas Linner, Charlie Zhao, Wen Pan, Alessandro Pracucci, and Thomas Bock. 2021. "A Simple Framework for the Cost–Benefit Analysis of Single-Task Construction Robots Based on a Case Study of a Cable-Driven Facade Installation Robot" Buildings 11, no. 1: 8. https://doi.org/10.3390/buildings11010008
APA StyleHu, R., Iturralde, K., Linner, T., Zhao, C., Pan, W., Pracucci, A., & Bock, T. (2021). A Simple Framework for the Cost–Benefit Analysis of Single-Task Construction Robots Based on a Case Study of a Cable-Driven Facade Installation Robot. Buildings, 11(1), 8. https://doi.org/10.3390/buildings11010008