
Predicting Indoor Temperature Distribution Based on Contribution Ratio of Indoor Climate (CRI) and Mobile Sensors



Abstract
:1. Introduction
2. Method Development
2.1. Definition of CRI
2.2. Prediction Algorithm
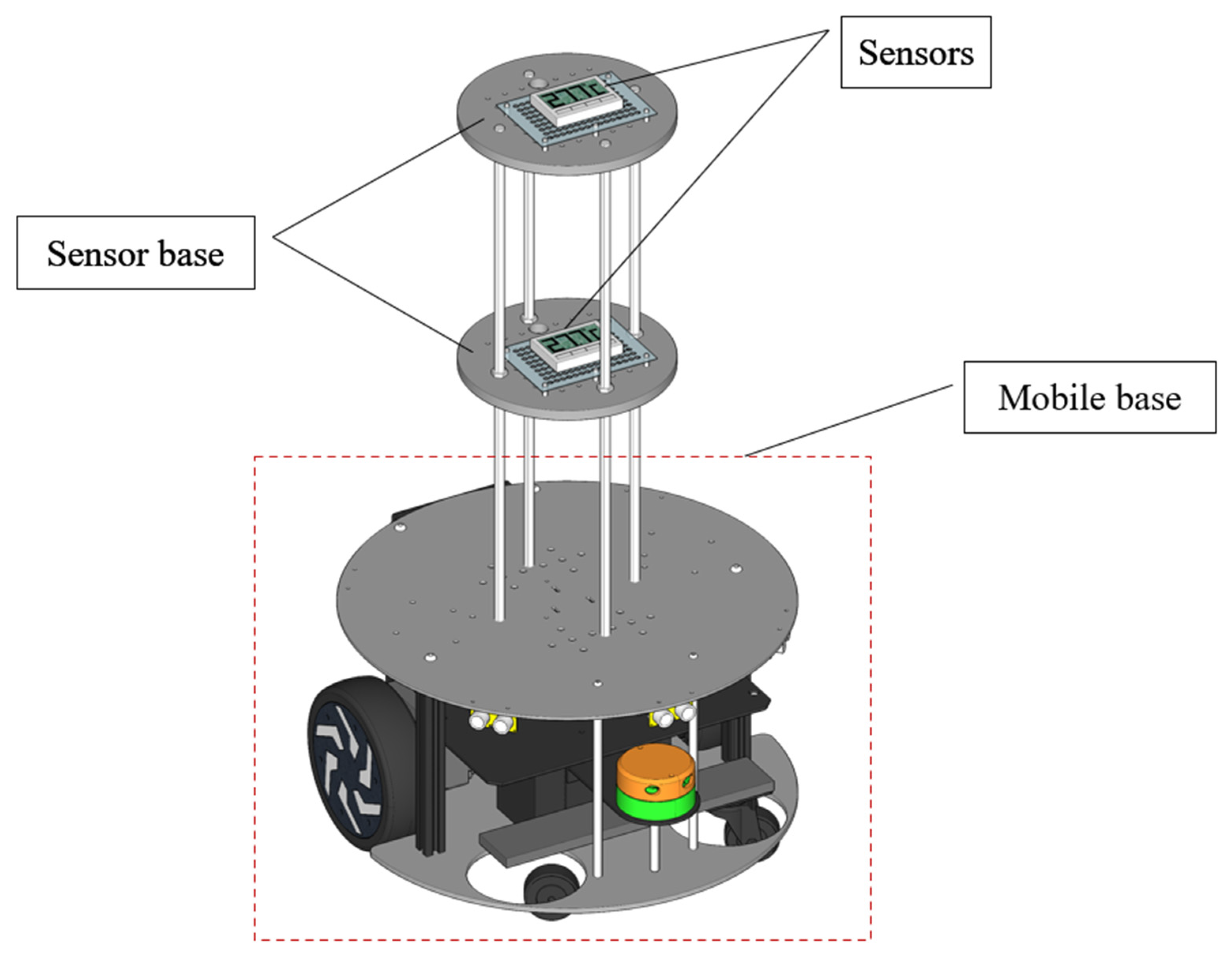
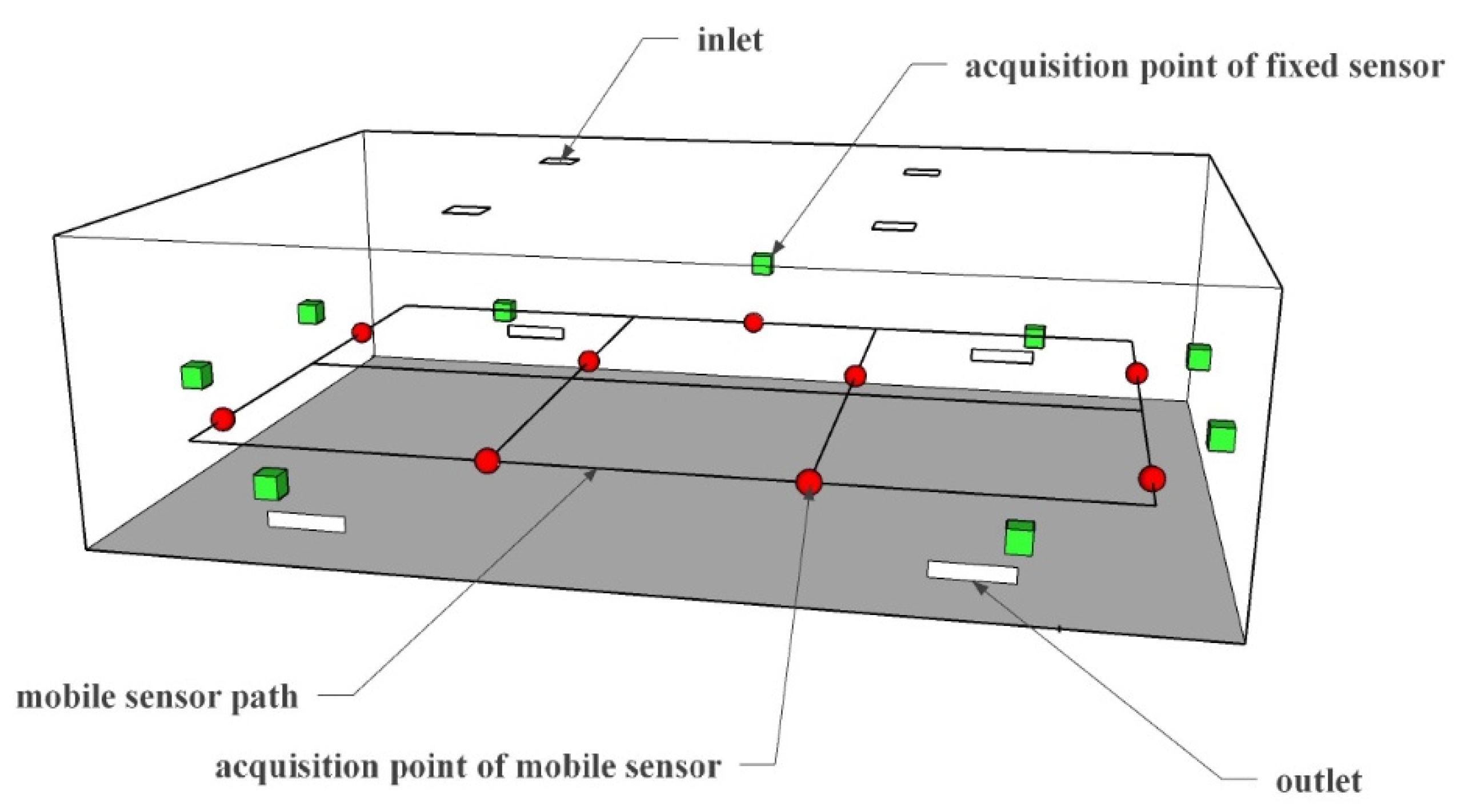
2.3. Mobile Sensors
3. Case Study
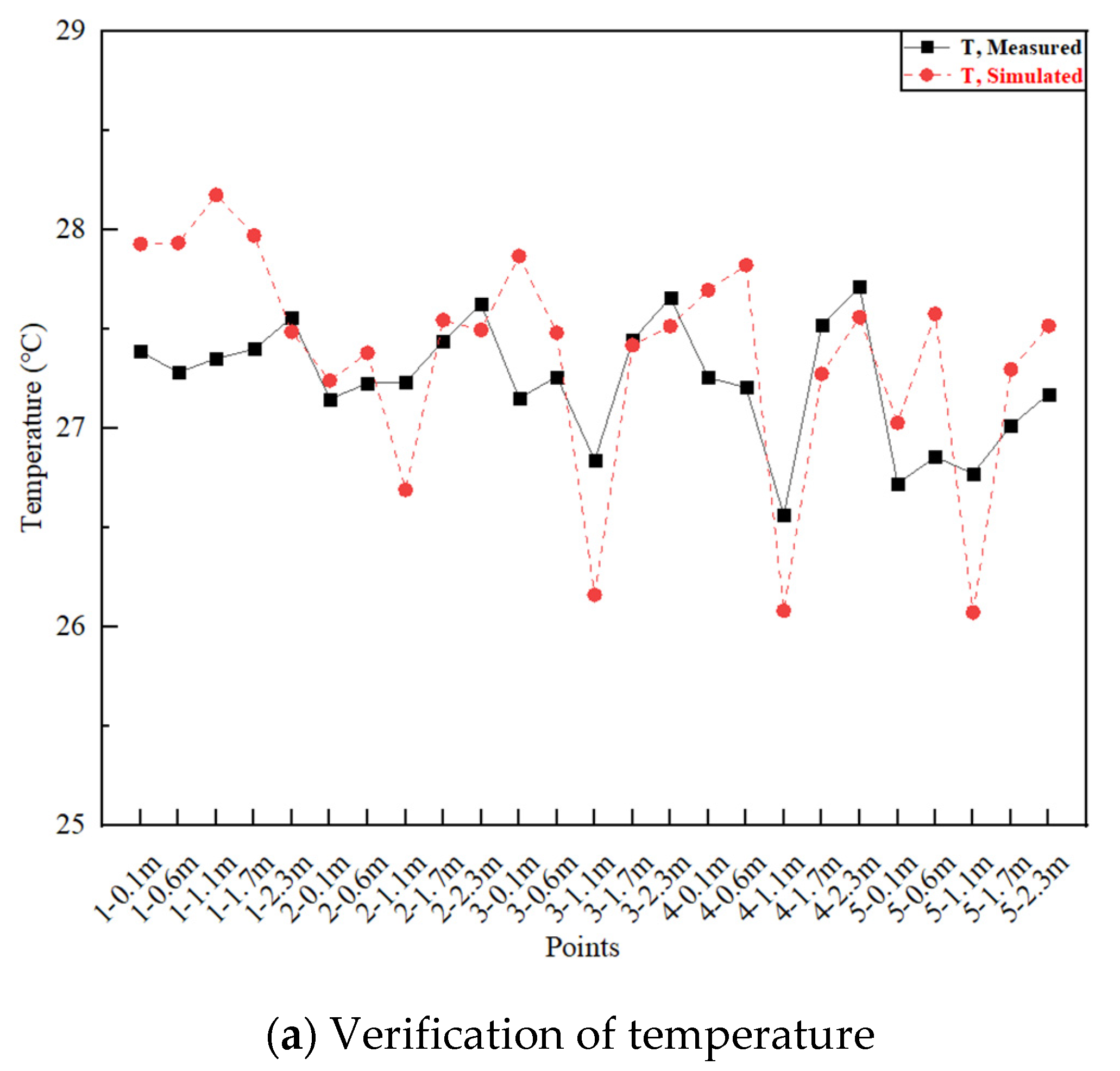
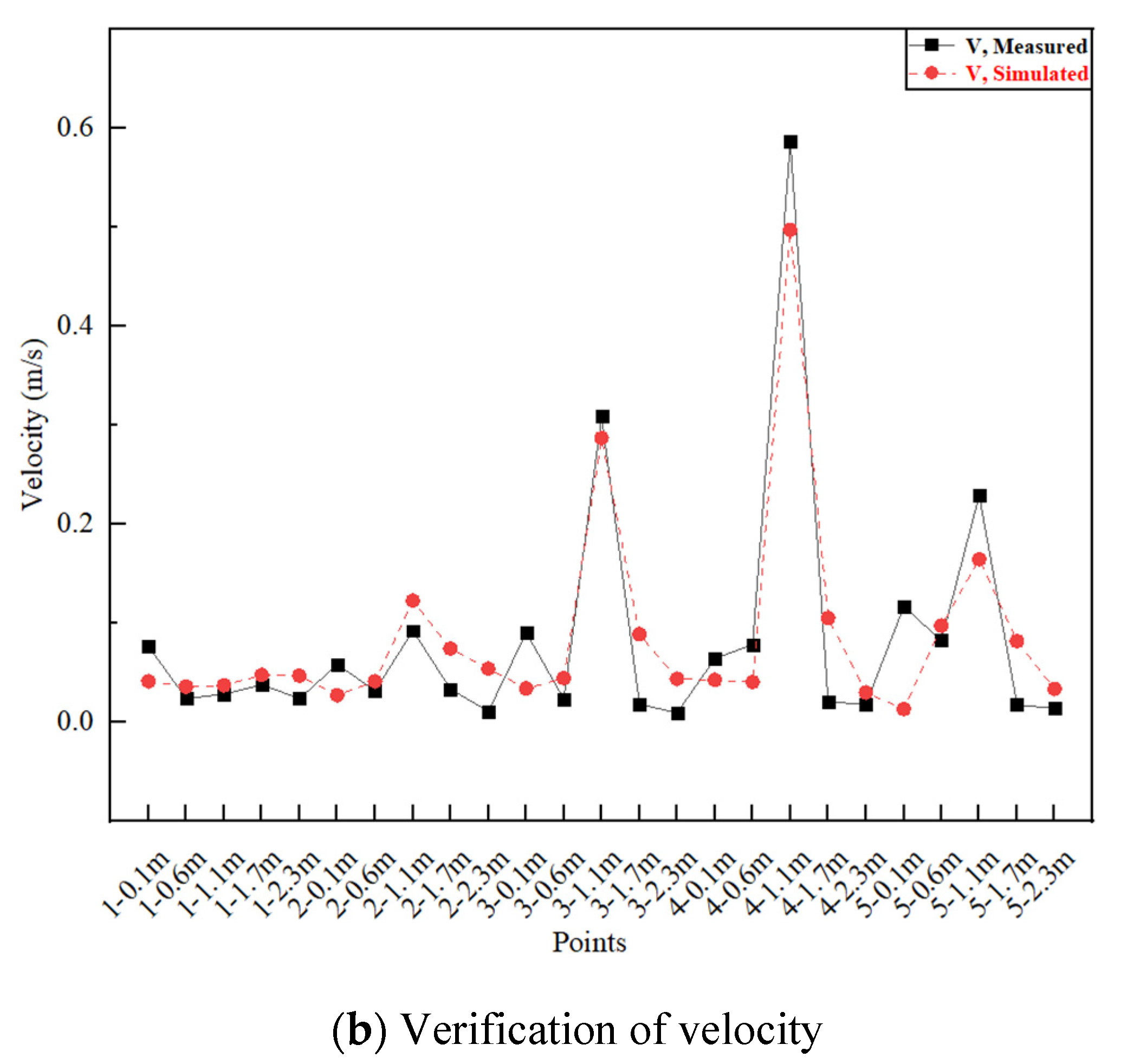
3.1. Verification of CFD Simulation
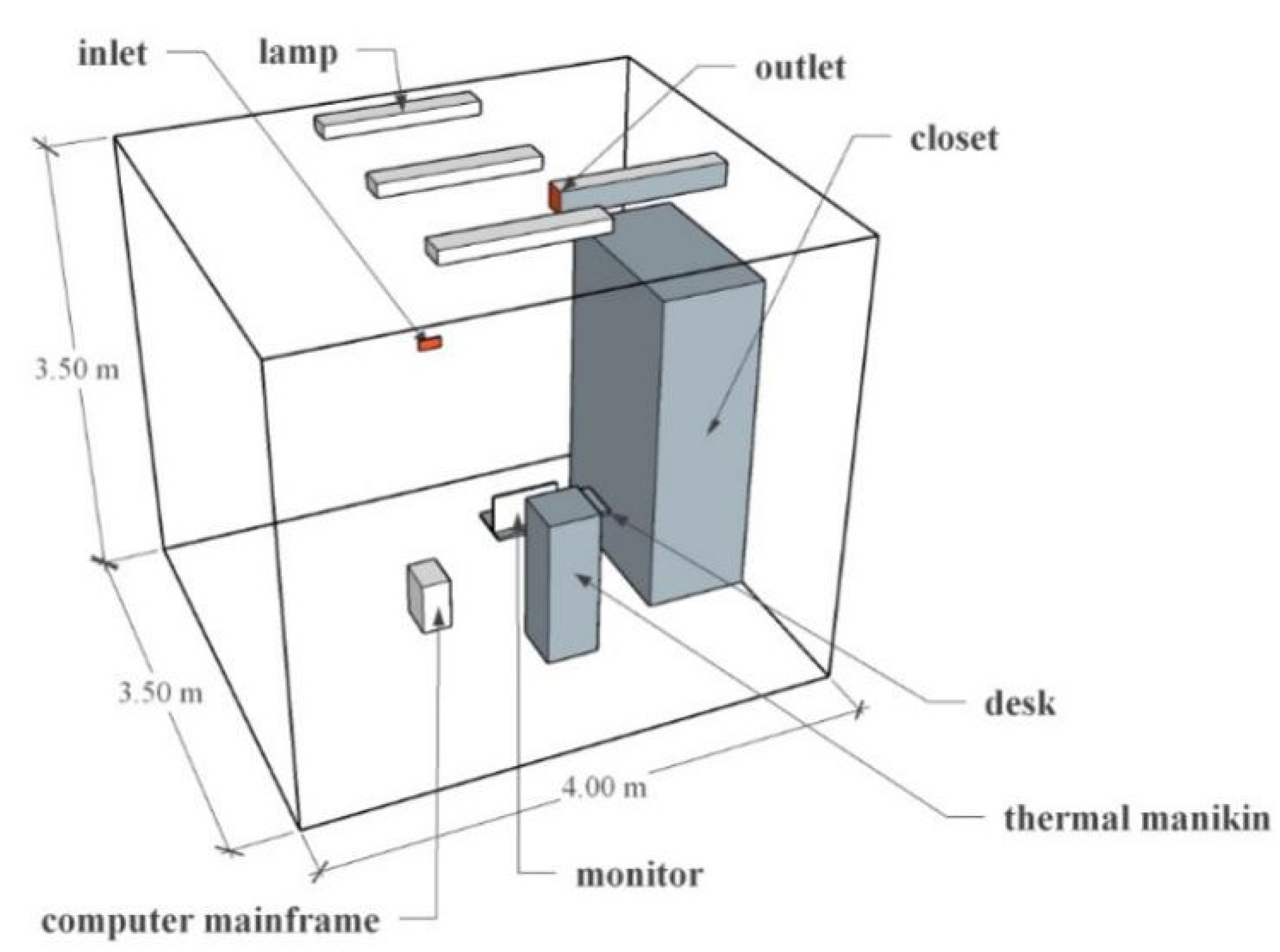
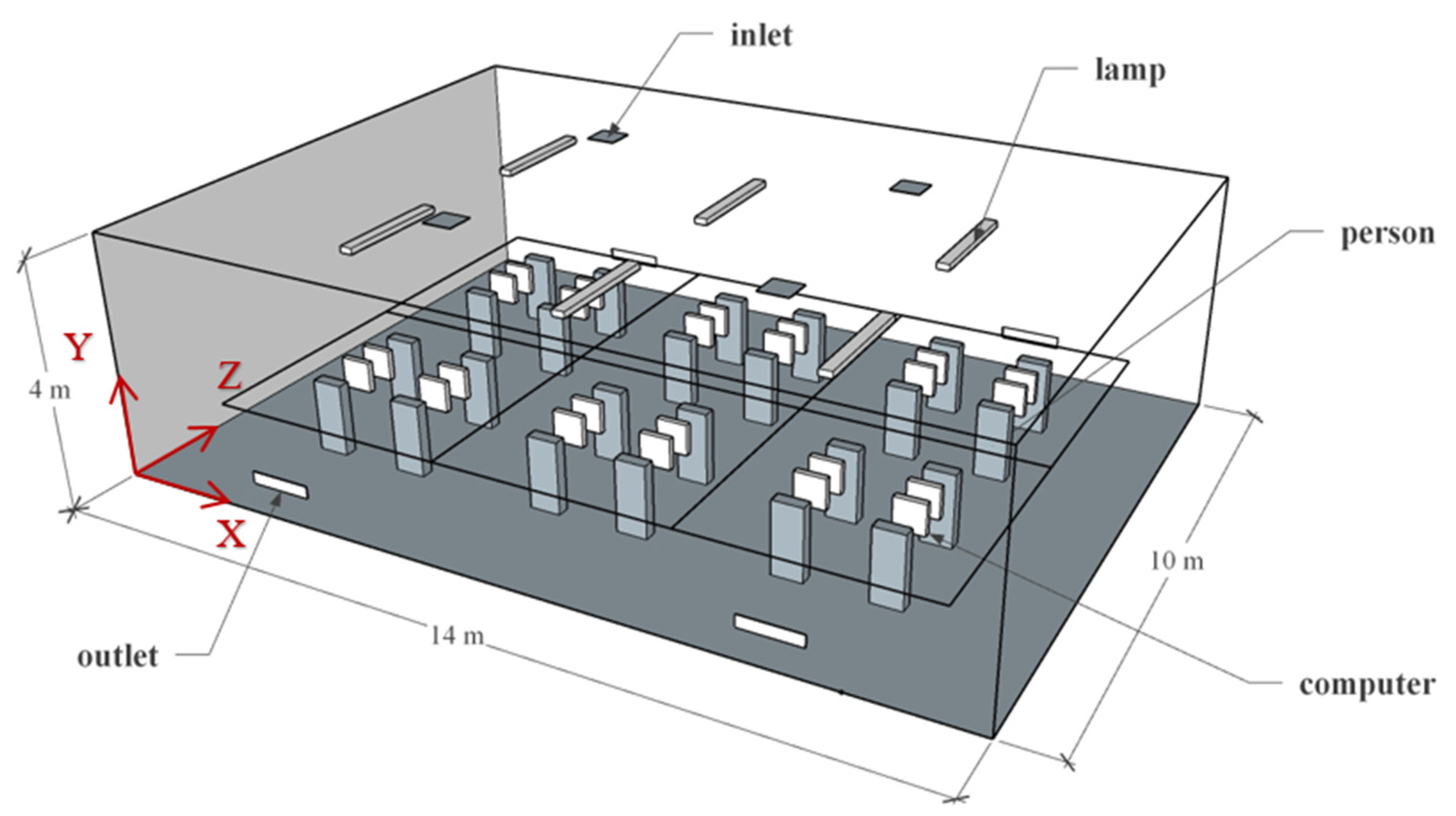
3.2. Description of the Model and Simulation
4. Results
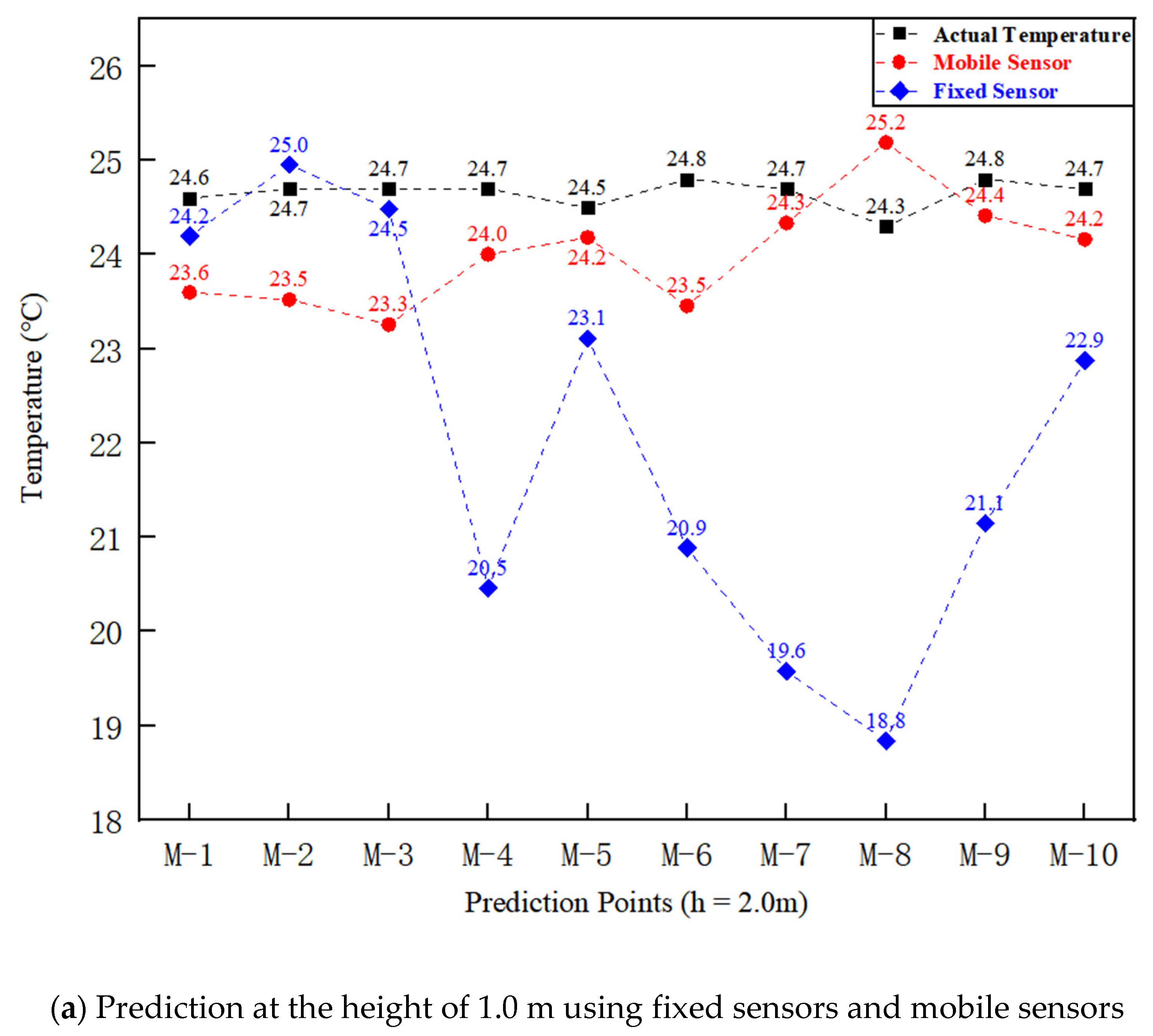
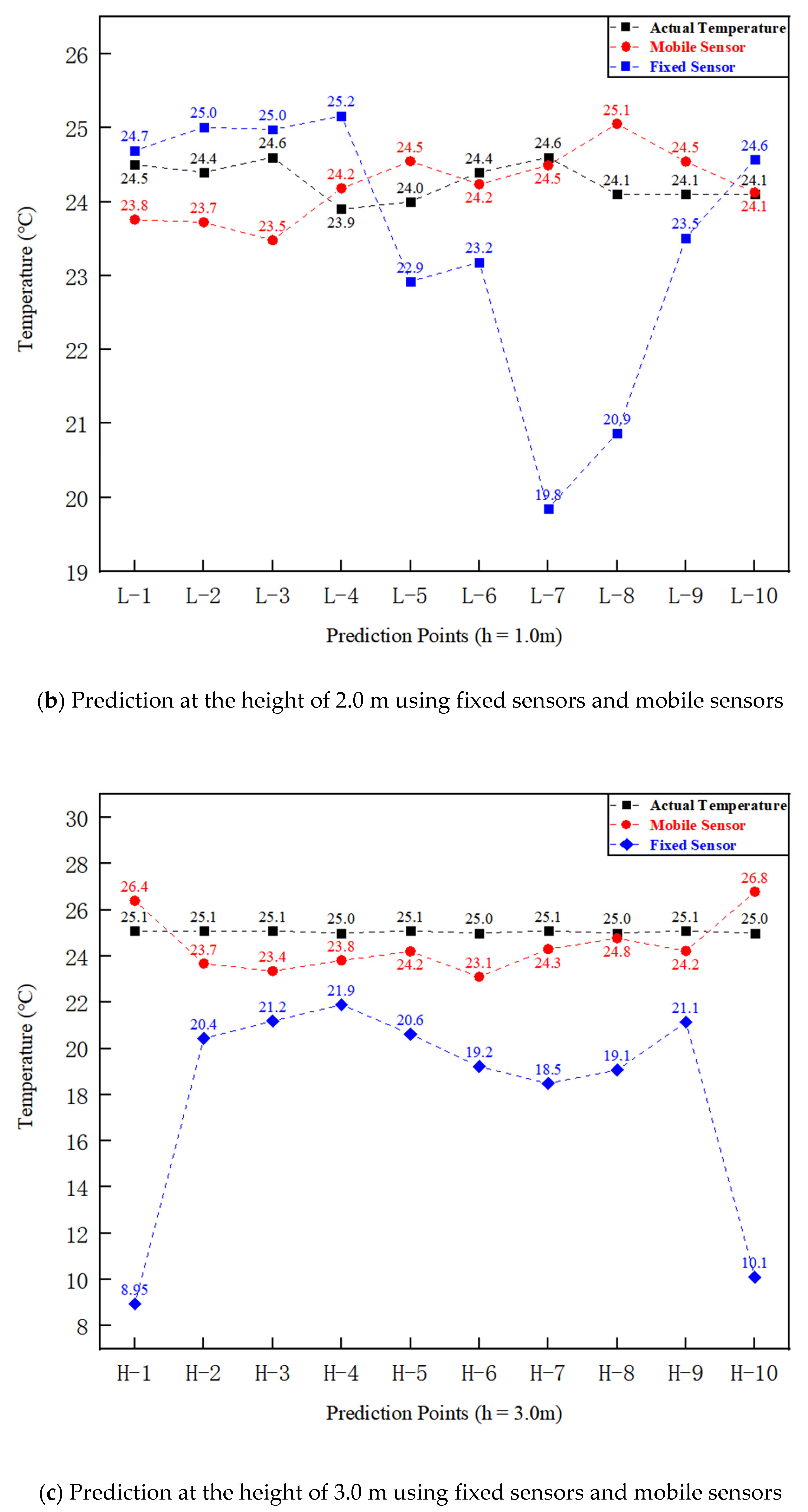
4.1. Comparison on Prediction Accuracy between Fixed Sensors and Mobile Sensors
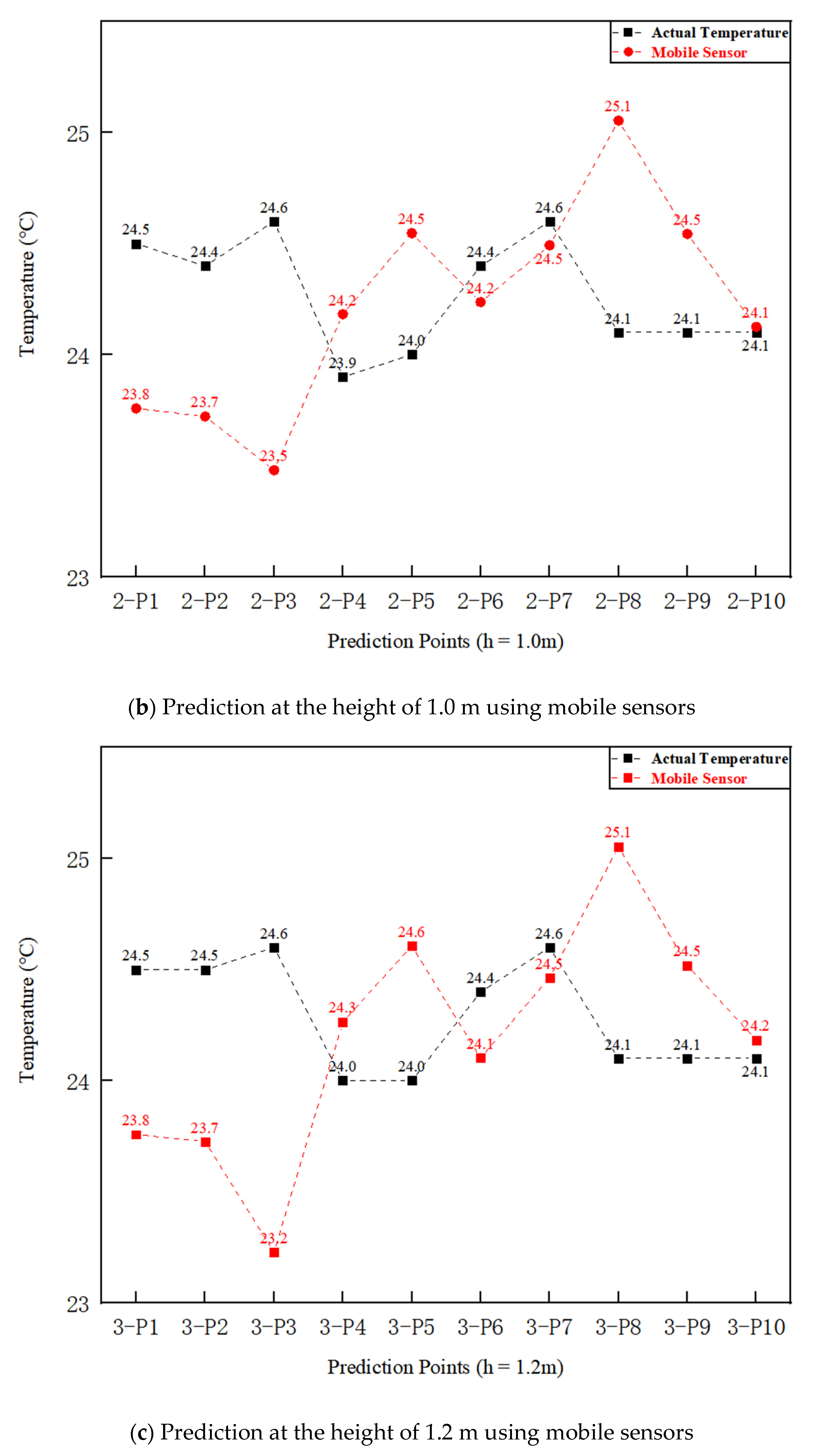
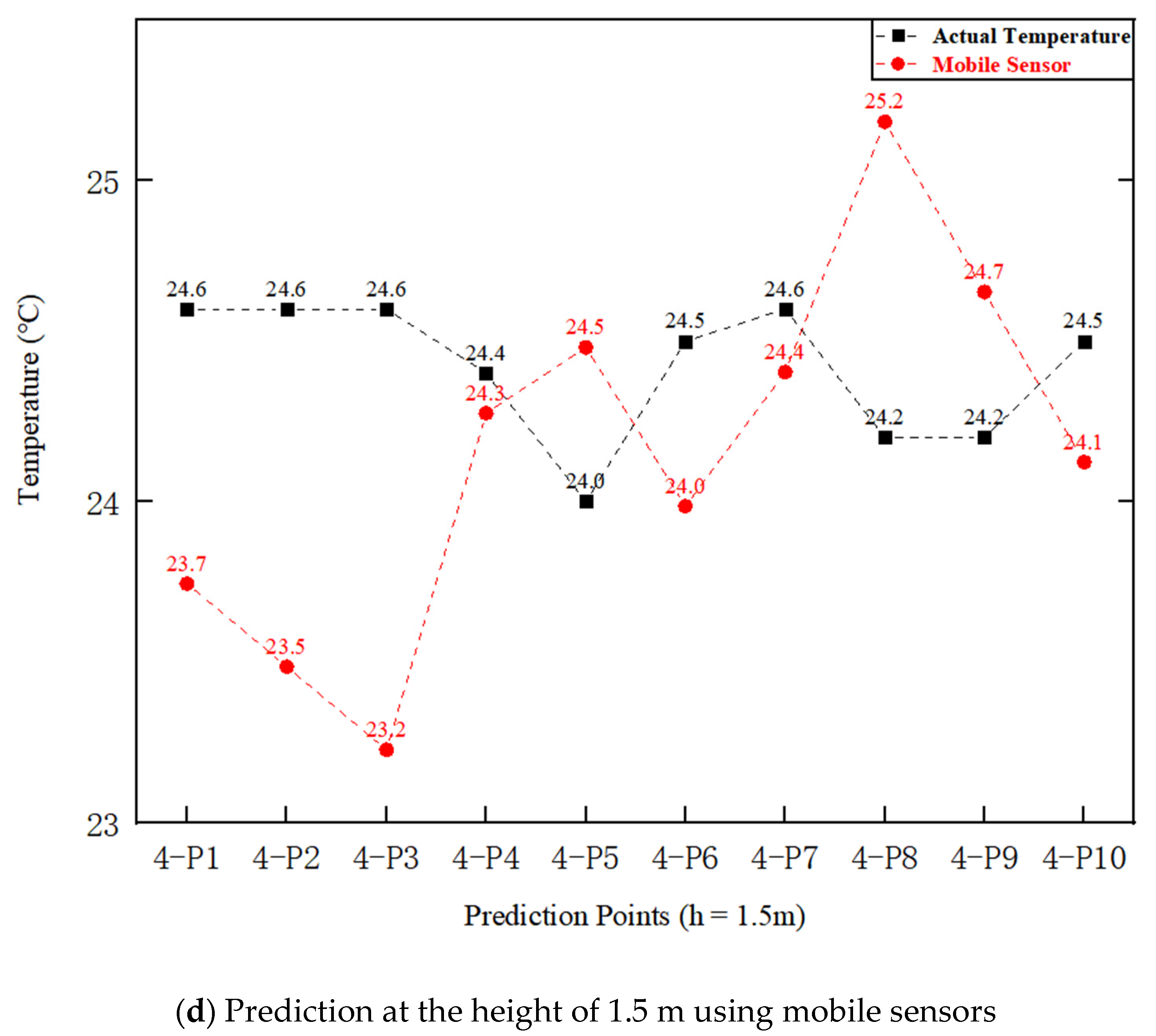
4.2. Analysis on the Impact of Mobile Sensors Acquisition Height on Prediction Accuracy
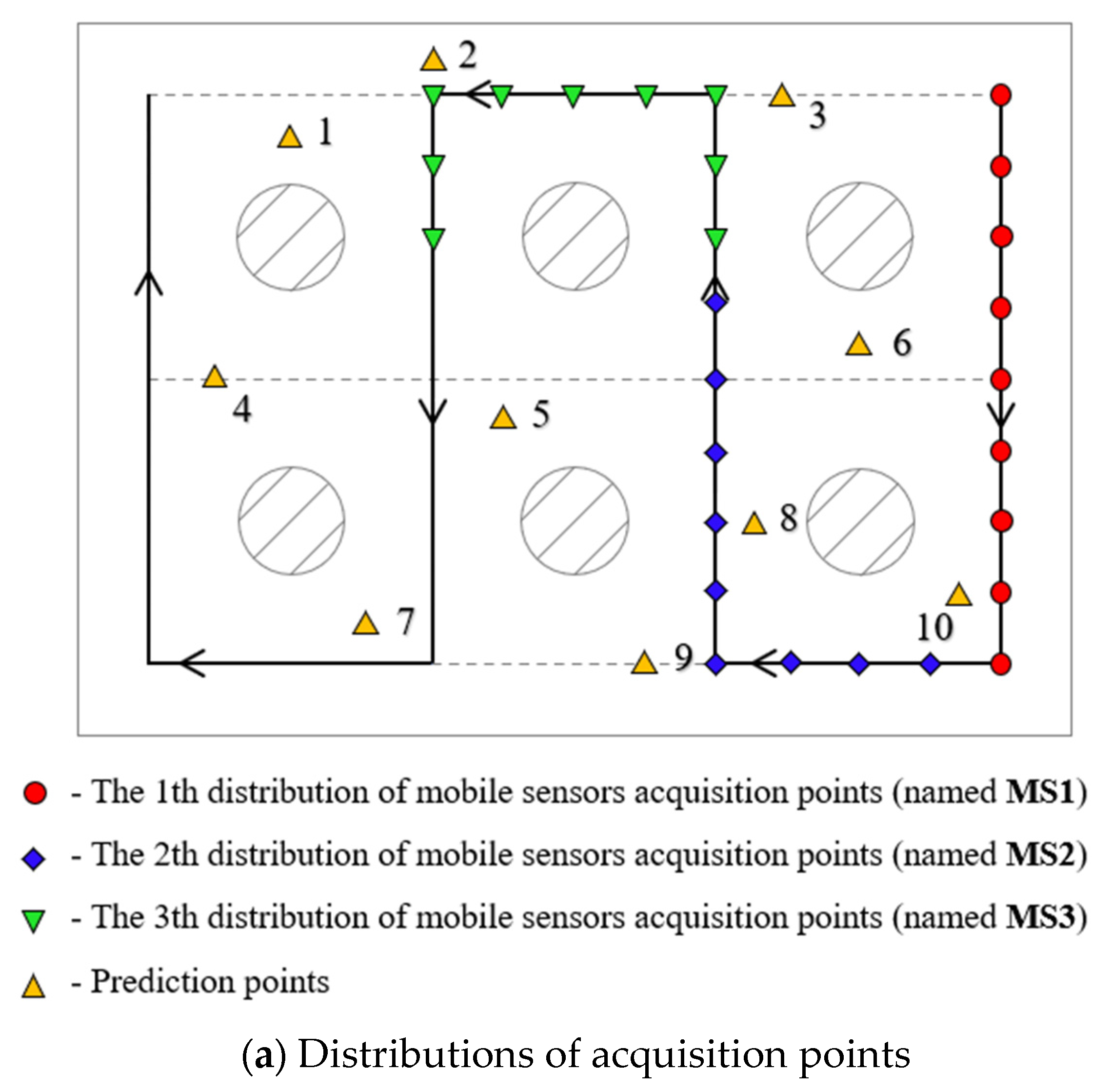
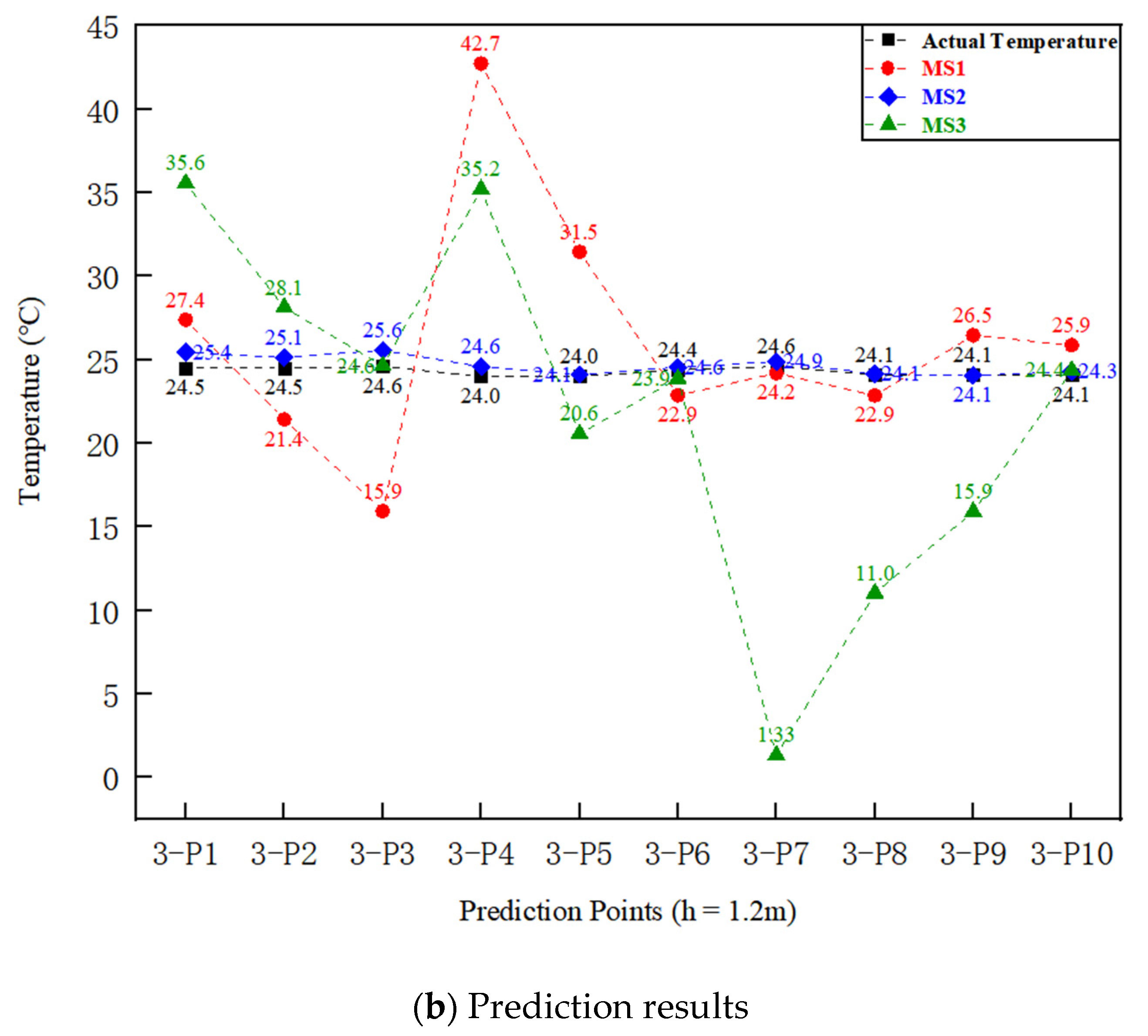
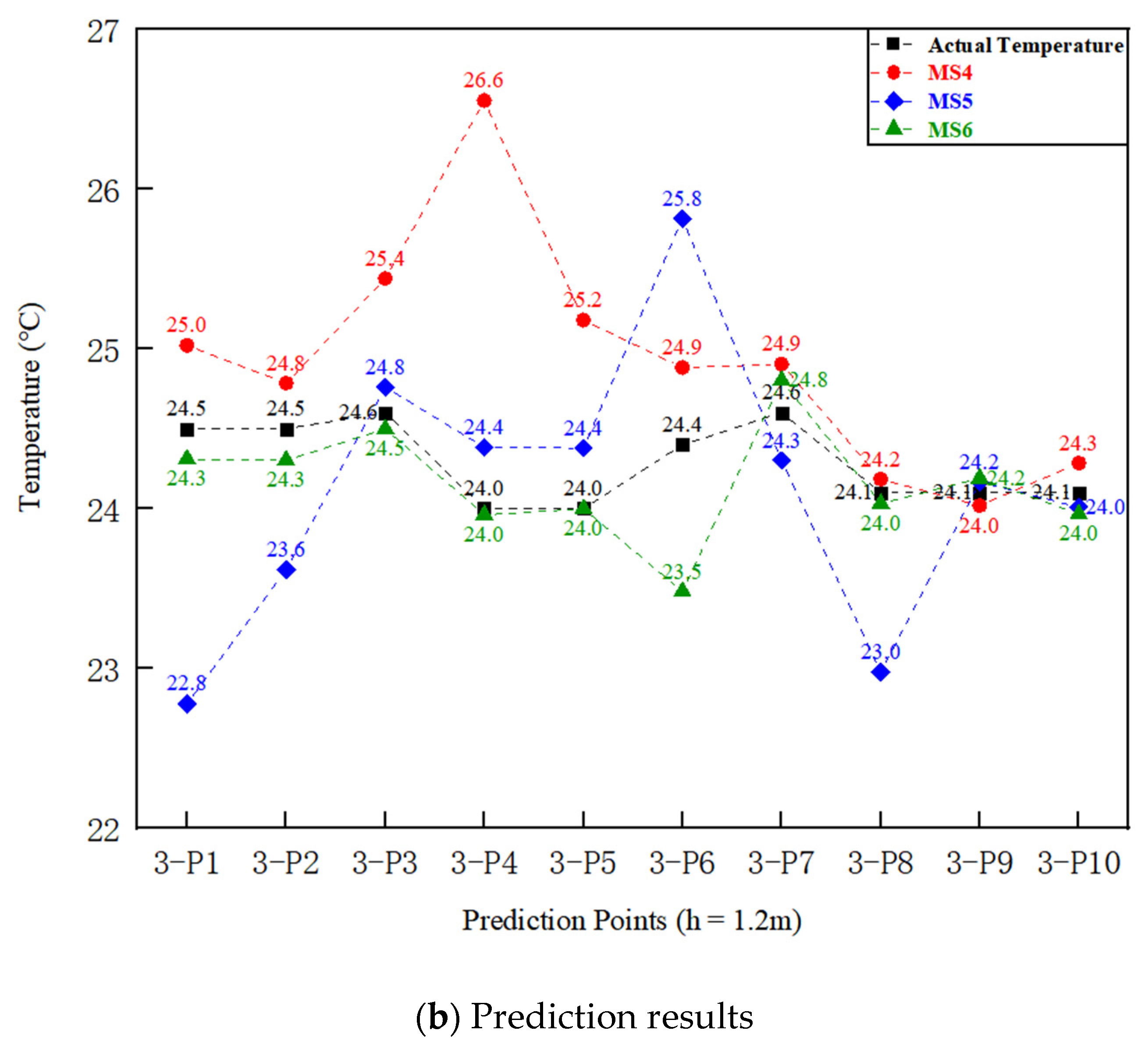
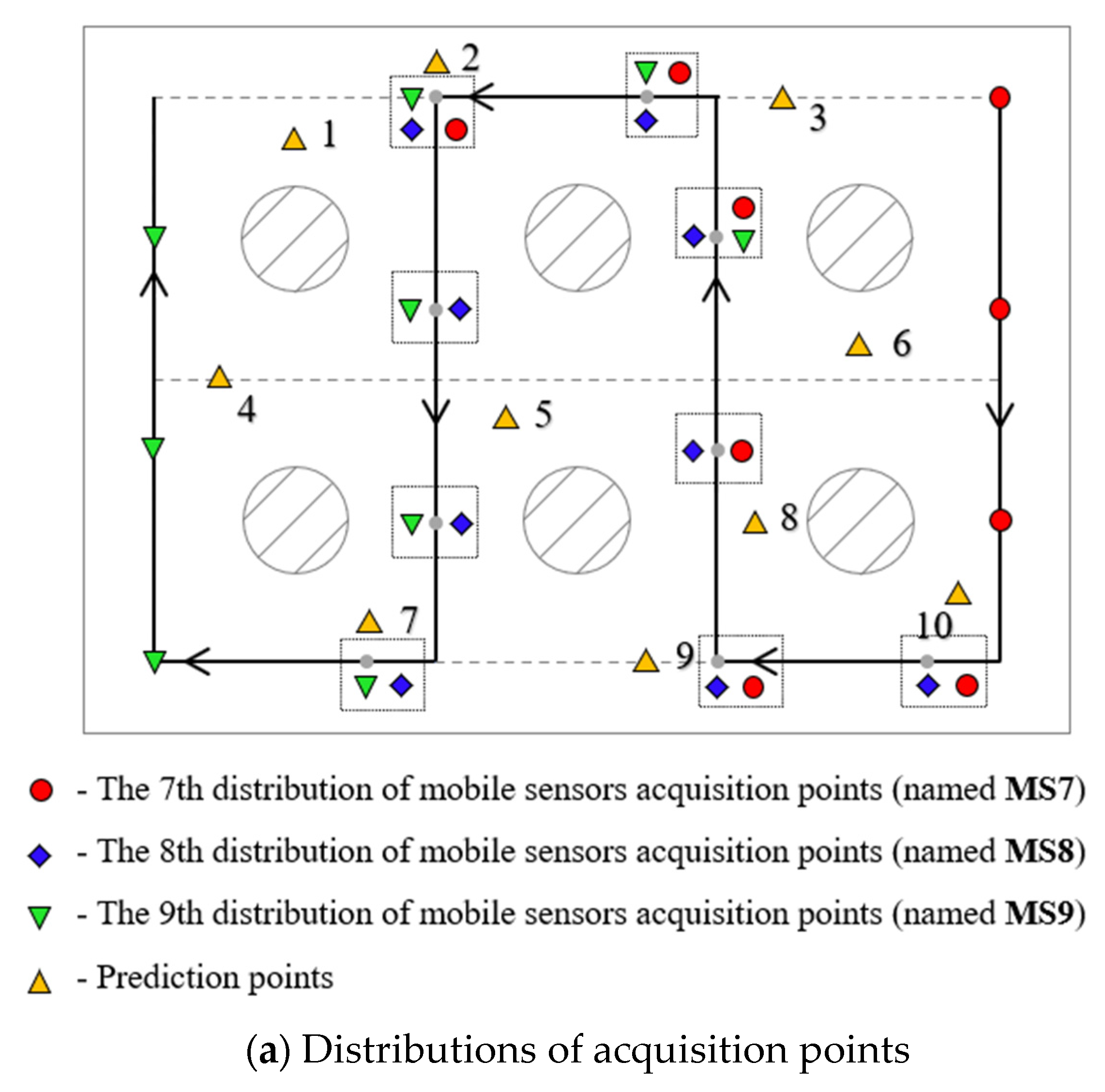
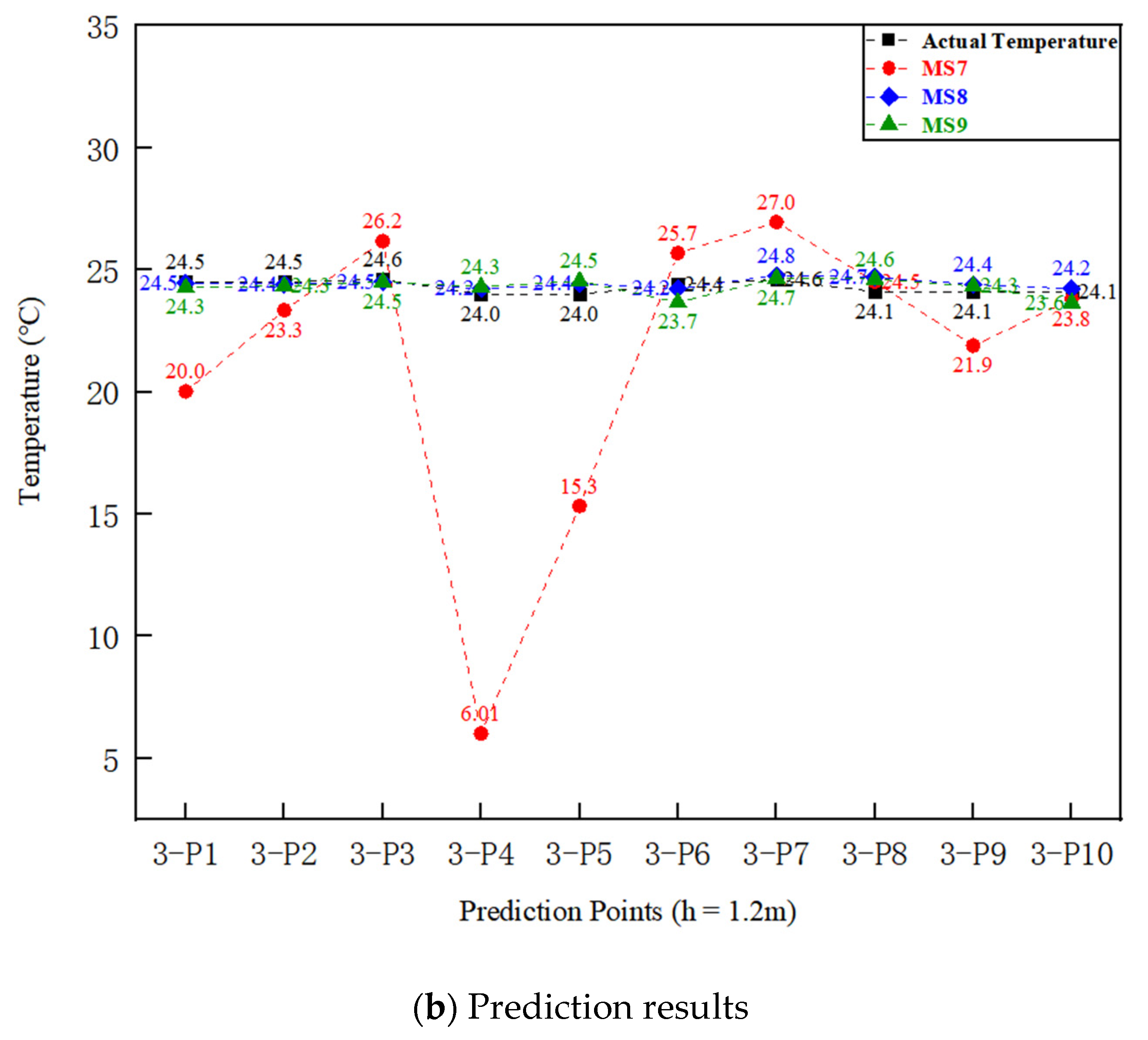
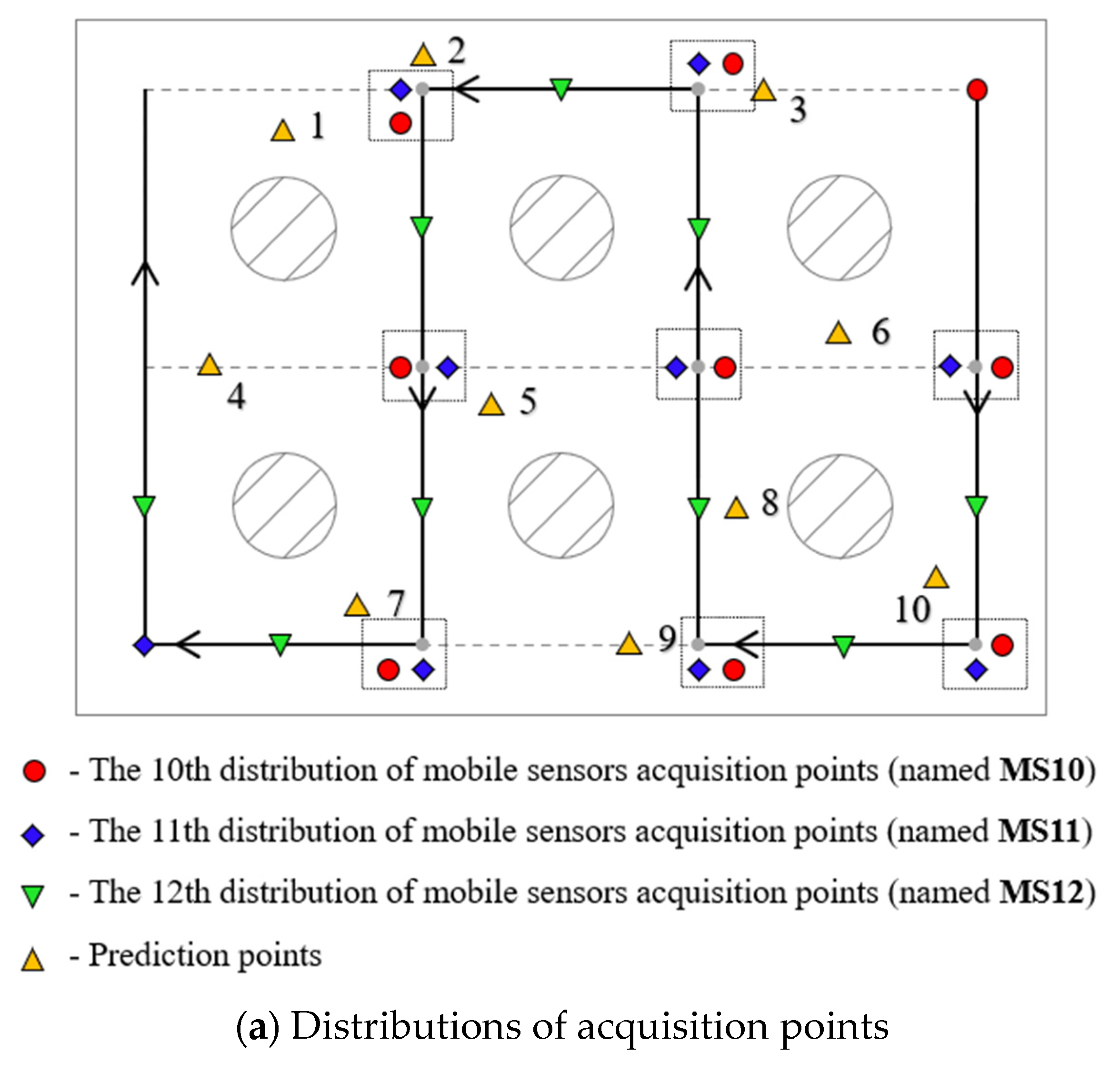
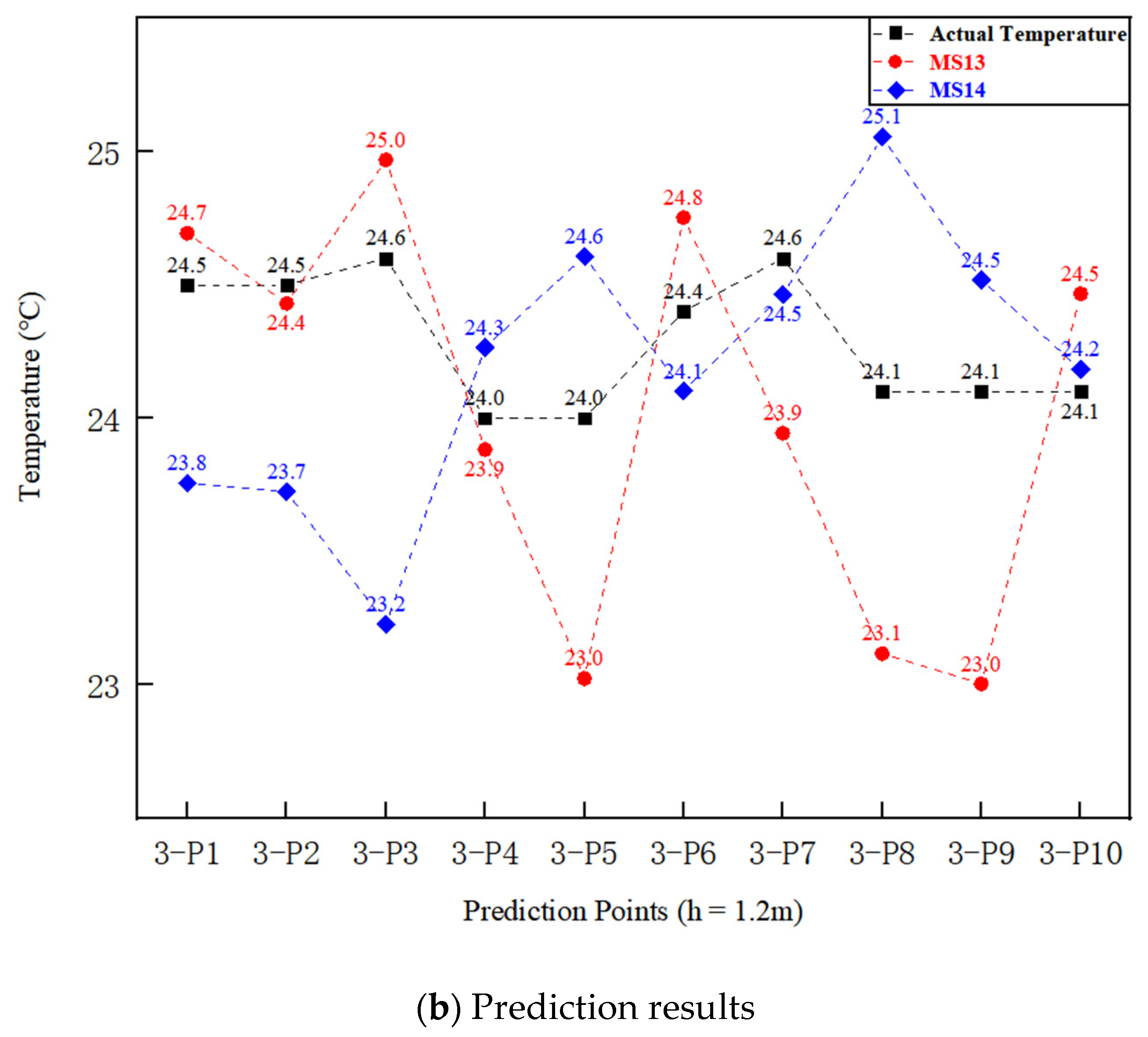
4.3. Analysis on the Impact of Mobile Sensors Acquisition Distance on Prediction Accuracy
5. Limitations
6. Conclusions
- (1)
- Due to some restrictions in practical applications, using mobile sensors instead of fixed sensors can realize the temperature distribution prediction of residential height by reducing the number of sensors. If there are no restrictions, the application of fixed sensors for prediction can also meet the requirements, but they are also limited by the acquisition height and acquisition path. Under this condition, it is possible that the combination of fixed sensors and mobile sensors can obtain higher prediction accuracy.
- (2)
- The acquisition height of mobile sensors has shown little impact on prediction accuracy in human activity areas. By comparing the prediction accuracy of mobile sensors for temperature distribution at different heights, it was found that the difference between them was not significant. Therefore, when using mobile sensors to predict the temperature distribution in human activity areas, there is no need to specifically set the acquisition height.
- (3)
- The acquisition distance should be large enough to make the distribution of acquisition points more dispersed. By comparing the prediction accuracy of mobile sensors with different acquisition distances, the results show that smaller acquisition distances made acquisition points more concentrated, hence reducing prediction accuracy. Considering the influence of airflow distribution, the acquisition points should be not very close to room boundaries.
Author Contributions
Funding
Data Availability Statement
Conflicts of Interest
Nomenclature
| air velocity | |
| turbulent viscosity | |
| time | |
| turbulent Prandtl number | |
| specific heat of indoor air | |
| air density | |
| heat emission and absorption of all heat sources | |
| heat emission or absorption of heat source | |
| component of the spatial coordinates (j = 1,2,3) | |
| air temperature | |
| air neutral temperature, i.e., indoor initial air temperature | |
| temperature rise or drop caused by heat source | |
| uniform air temperature caused by heat source | |
| temperature rise or drop of the uniform air temperature caused by heat source from | |
| air temperature at the location caused by heat source | |
| temperature rise or drop at the location caused by heat source from | |
| volume of supply air | |
| room volume | |
| number of heat sources | |
| number of sensor points | |
| CRI of heat source to location | |
| temperature rise or drop collected by mobile sensors from |
References
- Klepeis, N.E.; Nelson, W.C.; Ott, W.R.; Robinson, J.P.; Tsang, A.M.; Switzer, P.; Behar, J.V.; Hern, S.C.; Engelmann, W.H. The National Human Activity Pattern Survey (NHAPS): A resource for assessing exposure to environmental pollutants. J. Expo. Anal. Environ. Epidemiol. 2000, 11, 231–252. [Google Scholar] [CrossRef] [Green Version]
- Liu, S.M.; Cao, Q.; Zhao, X.W.; Lu, Z.C.; Deng, Z.P.; Dong, J.K.; Lin, X.R.; Qing, K.; Zhang, W.Z.; Chen, Q.Y. Improving indoor air quality and thermal comfort in residential kitchens with a new ventilation system. Build. Environ. 2020, 180, 107016. [Google Scholar] [CrossRef]
- Park, D.Y.; Chang, S. Effects of combined central air conditioning diffusers and window-integrated ventilation system on indoor air quality and thermal comfort in an office. Sustain. Cities Soc. 2020, 61, 102292. [Google Scholar] [CrossRef]
- Building Energy Conservation Research Centre, Tsinghua University. Annual Report on China Building Energy Efficiency; China Architecture & Building Press: Beijing, China, 2019. (In Chinese) [Google Scholar]
- Gilani, S.; Montazeri, H.; Blocken, B. CFD simulation of stratified indoor environment in displacement ventilation: Validation and sensitivity analysis. Build. Environ. 2016, 95, 299–313. [Google Scholar] [CrossRef]
- Chen, C.M.; Lai, D.Y.; Chen, Q.Y. Energy analysis of three ventilation systems for a large machining plant. Energy Build 2020, 224, 110272. [Google Scholar] [CrossRef]
- Cheng, Y.; Zhang, S.; Huan, C.; Oladokun, M.O.; Lin, Z. Optimization on fresh outdoor air ratio of air conditioning system with stratum ventilation for both targeted indoor air quality and maximal energy saving. Build. Environ. 2019, 147, 11–22. [Google Scholar] [CrossRef] [Green Version]
- Zhang, S.; Lin, Z.; Ai, Z.T.; Wang, F.H.; Cheng, Y.; Huang, C. Effects of operation parameters on performances of stratum ventilation for heating mode. Build. Environ. 2019, 148, 55–66. [Google Scholar] [CrossRef]
- Zou, Y.; Zhao, X.W.; Chen, Q.Y. Comparison of STAR-CCM+ and ANSYS Fluent for simulating indoor airflows. Build. Simul. 2018, 11, 165–174. [Google Scholar] [CrossRef]
- Taghinia, J.; Rahman, M.; Siikonen, T. Simulation of indoor airflow with RAST and SST-SAS models: A comparative study. Build. Simul. 2015, 8, 297–306. [Google Scholar] [CrossRef]
- Lei, L.; Zheng, H.; Wu, B.; Xue, Y. Inverse determination of multiple heat sources’ release history in indoor environments. Build. Simul. 2020, 14, 1263–1275. [Google Scholar] [CrossRef]
- Yang, X.Q.; Wang, H.D.; Su, C.X.; Wang, X.; Wang, Y. Heat transfer between occupied and unoccupied zone in large space building with floor-level side wall air-supply system. Build. Simul. 2020, 13, 1221–1233. [Google Scholar] [CrossRef]
- Choi, H.; Kim, H.; Kim, T. Long-term simulation for predicting indoor air pollutant concentration considering pollutant distribution based on concept of CRPS index. Build. Simul. 2019, 12, 1131–1140. [Google Scholar] [CrossRef]
- Bazdidi-Tehrani, F.; Masoumi-Verki, S.; Gholamalipour, P.; Kiamansouri, M. Large eddy simulation of pollutant dispersion in a naturally cross-ventilated model building: Comparison between sub-grid scale models. Build. Simul. 2019, 12, 921–941. [Google Scholar] [CrossRef]
- Sempey, A.; Inard, C.; Ghiaus, C.; Allery, C. Fast simulation of temperature distribution in air-conditioned rooms by using proper orthogonal decomposition. Build. Environ. 2009, 44, 280–289. [Google Scholar] [CrossRef]
- Cao, S.J.; Cen, D.; Zhang, W.; Feng, Z. Study on the impacts of human walking on indoor particles dispersion using momentum theory method. Build. Environ. 2017, 126, 195–206. [Google Scholar] [CrossRef]
- Liu, W.; Jin, M.G.; Chen, C.; You, R.Y.; Chen, Q.Y. Implementation of a fast fluid dynamics model in OpenFOAM for simulating indoor airflow. Numer. Heat Transf. Part A Appl. 2016, 69, 748–762. [Google Scholar] [CrossRef]
- Liu, W.; Hooff, T.V.; An, Y.T.; Hu, S.; Chen, C. Modeling transient particle transport in transient indoor airflow by fast fluid dynamics with the Markov chain method. Build. Environ. 2020, 186, 107323. [Google Scholar] [CrossRef]
- Tian, W.; Sevilla, T.A.; Zuo, W.D.; Sohn, M.D. Coupling fast fluid dynamics and multizone airflow models in Modelica Buildings library to simulate the dynamics of HVAC systems. Build. Environ. 2017, 122, 269–286. [Google Scholar] [CrossRef]
- Liu, W.; You, R.Y.; Zhang, J.; Chen, Q.Y. Development of a fast fluid dynamics-based adjoint method for the inverse design of indoor environments. J. Build. Perform. Simul. 2017, 10, 326–343. [Google Scholar] [CrossRef]
- Kato, S.; Murakami, S.; Kobayashi, H. New scales for assessing contribution of heat sources and sinks to temperature distributions in room by means of numerical simulation. In Proceedings of the ROOMVENT’94, Fourth International Conference on Air Distribution in Rooms, Krakow, Poland, 15–17 June 1994; pp. 539–557. [Google Scholar]
- Sandberg, M. Ventilation effectiveness and purging flow rate—A review. In Proceedings of the International Symposium on Room Air Convection and Ventilation Effectiveness, Tokyo, Japan, 22–24 July 1992. [Google Scholar]
- Kato, S.; Murakami, S. New ventilation efficiency scales based on spatial distribution of contaminant concentration aided by numerical simulation. ASHRAE Trans. 1988, 94, 309–330. [Google Scholar]
- Zhang, W.R.; Kato, S.; Ishida, Y.; Hiyama, K. Calculation method of contribution ratio of indoor climate (CRI) by means of setting a uniform heat sink in natural convection air flow field. J. Environ. Eng. (Trans. AIJ) 2010, 75, 1027–1032. (In Japanese) [Google Scholar] [CrossRef]
- Zhang, W.R.; Hiyama, K.; Kato, S.; Ishida, Y. Building energy simulation considering spatial temperature distribution for nonuniform indoor environment. Build. Environ. 2013, 63, 89–96. [Google Scholar] [CrossRef]
- Li, X.T.; Zhao, B. Accessibility: A new concept to evaluate ventilation performance in a finite period of time. Indoor Built Environ. 2004, 13, 287–293. [Google Scholar] [CrossRef]
- Shao, X.L.; Ma, X.J.; Li, X.T.; Liang, C. Fast prediction of non-uniform temperature distribution: A concise expression and reliability analysis. Energy Build. 2017, 141, 295–307. [Google Scholar] [CrossRef]
- Ma, X.J.; Shao, X.L.; Li, X.T.; Lin, Y.W. An analytical expression for transient distribution of passive contaminant under steady flow field. Build. Environ. 2012, 52, 98–106. [Google Scholar] [CrossRef]
- Cao, S.J.; Meyers, J. On the construction and use of linear low-dimensional ventilation models. Indoor Air 2012, 22, 427–441. [Google Scholar] [CrossRef] [Green Version]
- Cao, S.J.; Ren, C. Ventilation control strategy using low-dimensional linear ventilation models and artificial neural network. Build. Environ. 2018, 144, 316–333. [Google Scholar] [CrossRef]
- Ren, C.; Cao, S.J. Development and application of linear ventilation and temperature models for indoor environmental prediction and HVAC systems control. Sustain. Cities Soc. 2019, 51, 101673. [Google Scholar] [CrossRef]
- Tian, W.; Han, X.; Zuo, W.D.; Sohn, M.D. Building energy simulation coupled with CFD for indoor environment: A critical review and recent applications. Energy Build. 2018, 165, 184–199. [Google Scholar] [CrossRef]
- Zuo, W.D.; Chen, Q.Y. Fast and informative flow simulations in a building by using fast fluid dynamics model on graphics processing unit. Build. Environ. 2010, 45, 747–757. [Google Scholar] [CrossRef]
- Tian, W.; Sevilla, T.A.; Zuo, W.D. A systematic evaluation of accelerating indoor airflow simulations using cross-platform parallel computing. J. Build. Perform. Simul. 2017, 10, 243–255. [Google Scholar] [CrossRef]
- Sasamoto, T.; Kato, S.; Zhang, W.R. Control of indoor thermal environment based on concept of contribution ratio of indoor climate. Build. Simul. 2010, 3, 263–278. [Google Scholar] [CrossRef]
- Hiyama, K.; Ishida, Y.; Kato, S. Thermal simulation: Response factor analysis using three-dimensional CFD in the simulation of air conditioning control. Build. Simul. 2010, 3, 195–203. [Google Scholar] [CrossRef]
- Hiyama, K.; Kato, S. Integration of three-dimensional CFD results into energy simulations utilizing an advection-diffusion response factor. Energy Build. 2011, 43, 2752–2759. [Google Scholar] [CrossRef]
- Huang, H.; Kato, S.; Hu, R.; Ishida, Y. Development of new indices to assess the contribution of moisture sources to indoor humidity and application to optimization design: Proposal of CRI(H) and a transient simulation for the prediction of indoor humidity. Build. Environ. 2011, 46, 1817–1826. [Google Scholar] [CrossRef]
- Zhang, W.R.; Zhao, Y.N.; Xue, P.; Mizutani, K. Review and Development of the Contribution Ratio of Indoor Climate (CRI). Energy Built Environ. 2021, in press. [Google Scholar] [CrossRef]
- Xue, Y.; Zhai, Z.Q. Inverse identification of multiple outdoor pollutant sources with a mobile sensor. Build. Simul. 2017, 10, 255–263. [Google Scholar] [CrossRef]
- Tian, X.; Li, B.Z.; Ma, Y.X.; Liu, D.; Li, Y.C.; Cheng, Y. Experimental study of local thermal comfort and ventilation performance for mixing, displacement and stratum ventilation in an office. Sustain. Cities Soc. 2019, 50, 101630. [Google Scholar] [CrossRef]


























{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Surface | Boundary Condition |
|---|---|
| Walls/Ceiling/Floor | Wall; Adiabatic |
| Lamp | Wall; Heat flux: 150 W/m2. |
| Person | Wall; Heat flux: 45 W/m2 |
| Computer | Wall; Heat flux: 70 W/m2 |
| Air supply | Velocity-inlet; Velocity: 1.0 m/s. Temperature: 21 °C |
| Air exhaust | Outflow |
| Average Relative Error | Fixed Sensors | Mobile Sensors |
|---|---|---|
| At the height of h = 1.0 m | 5.7% | 2.1% |
| At the height of h = 2.0 m | 10.8% | 3.3% |
| At the height of h = 3.0 m | 27.7% | 4.8% |
| Average Relative Error | Mobile Sensors |
|---|---|
| At the height of h = 0.7 m | 2.1% |
| At the height of h = 1.0 m | 2.1% |
| At the height of h = 1.2 m | 2.3% |
| At the height of h = 1.5 m | 2.7% |
| MS1 | MS2 | MS3 | MS4 | MS5 | MS6 | |
| Average relative error | 19.9% | 1.6% | 30.7% | 2.7% | 2.7% | 0.8% |
| MS7 | MS8 | MS9 | MS10 | MS11 | MS12 | |
| Average relative error | 16.7% | 0.9% | 1.4% | 9.2% | 0.5% | 2.0% |
| MS13 | MS14 | |||||
| Average relative error | 2.1% | 2.3% |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2021 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Zhao, Y.; Zang, Z.; Zhang, W.; Wei, S.; Xuan, Y. Predicting Indoor Temperature Distribution Based on Contribution Ratio of Indoor Climate (CRI) and Mobile Sensors. Buildings 2021, 11, 458. https://doi.org/10.3390/buildings11100458
Zhao Y, Zang Z, Zhang W, Wei S, Xuan Y. Predicting Indoor Temperature Distribution Based on Contribution Ratio of Indoor Climate (CRI) and Mobile Sensors. Buildings. 2021; 11(10):458. https://doi.org/10.3390/buildings11100458
Chicago/Turabian StyleZhao, Yanan, Zihan Zang, Weirong Zhang, Shen Wei, and Yingli Xuan. 2021. "Predicting Indoor Temperature Distribution Based on Contribution Ratio of Indoor Climate (CRI) and Mobile Sensors" Buildings 11, no. 10: 458. https://doi.org/10.3390/buildings11100458
APA StyleZhao, Y., Zang, Z., Zhang, W., Wei, S., & Xuan, Y. (2021). Predicting Indoor Temperature Distribution Based on Contribution Ratio of Indoor Climate (CRI) and Mobile Sensors. Buildings, 11(10), 458. https://doi.org/10.3390/buildings11100458