
Evaluation of Metaheuristic-Based Methods for Optimization of Truss Structures via Various Algorithms and Lèvy Flight Modification




Abstract
:1. Introduction
2. Materials and Methods
- -
- FPA, ABC, BA and GWO are nature-inspired algorithms. HS is a music-inspired one, while JA does not use a direct imitation. Jaya word means victory in Sanskrit. Due to that, a bond can be only generated by assuming the reaching of an optimum result as a victory;
- -
- FPA uses Lèvy distribution in its classical form. Since wolves, bees and bats can also act as random flying or moving members, modified versions of these algorithms with Lèvy distribution that characterize the random flight are investigated;
- -
- Generally, metaheuristic algorithms have two stages of optimization using a probability to select one of these stages (phases) in an iteration. ABC is a three-stage (phase) algorithm, while JA has only a single phase. The others are classical two-phase algorithms;
- -
- JA has no user-defined specific parameter in the formulation, while the others need parameters in formulations and selection of a stage;
- -
- BA uses a three-step formulation (frequency, velocity and new solution) to update a solution.
- -
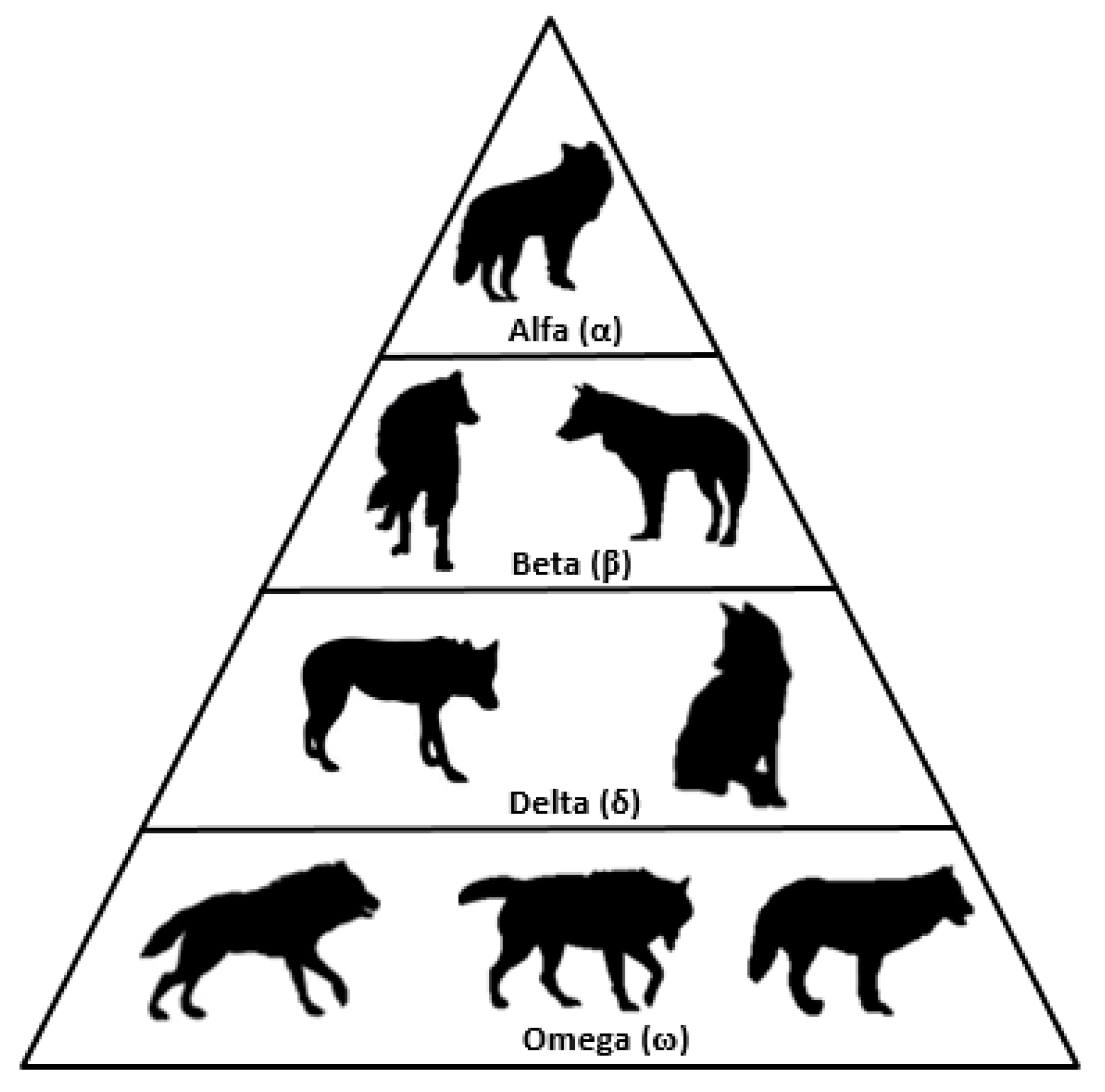
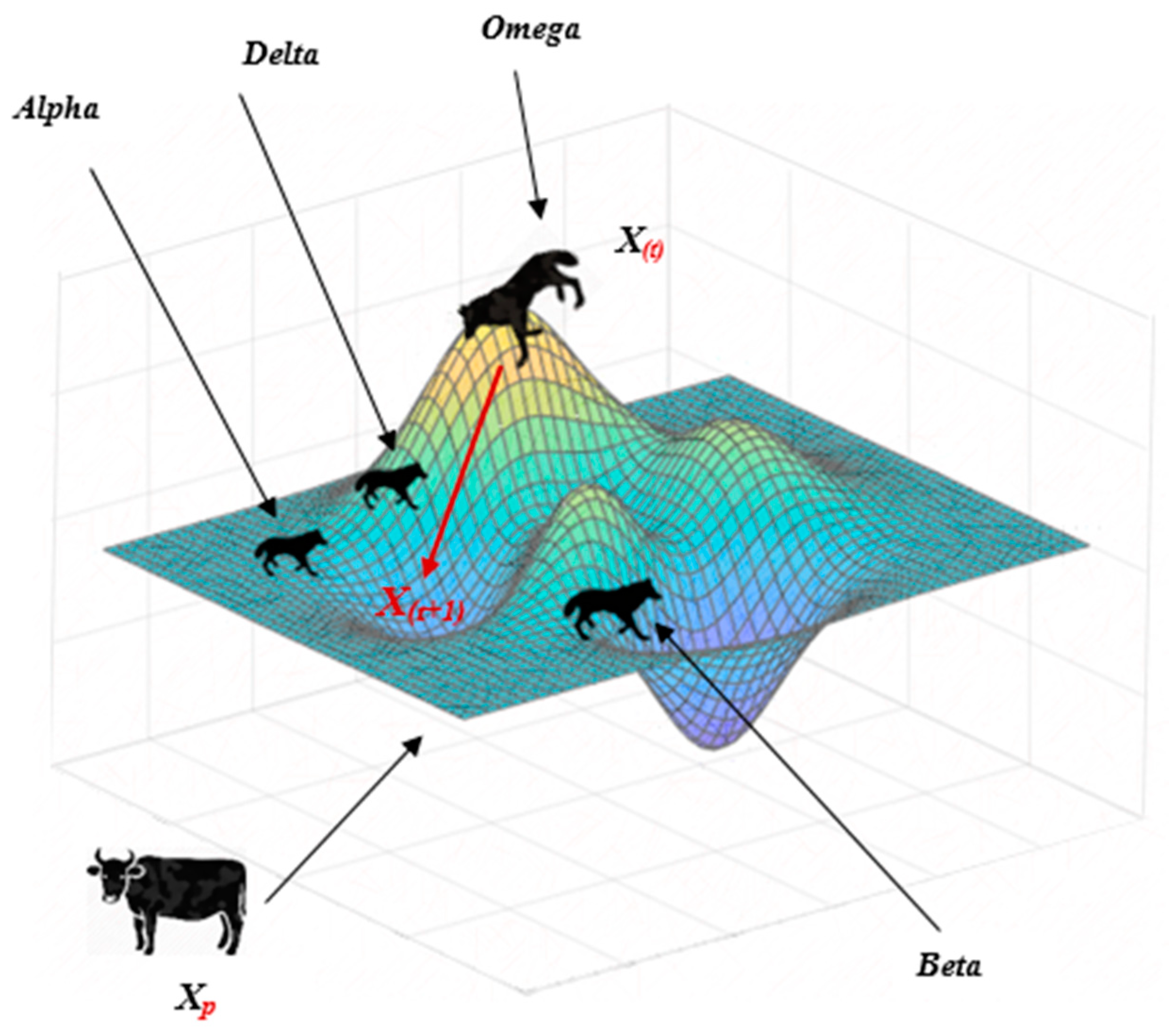
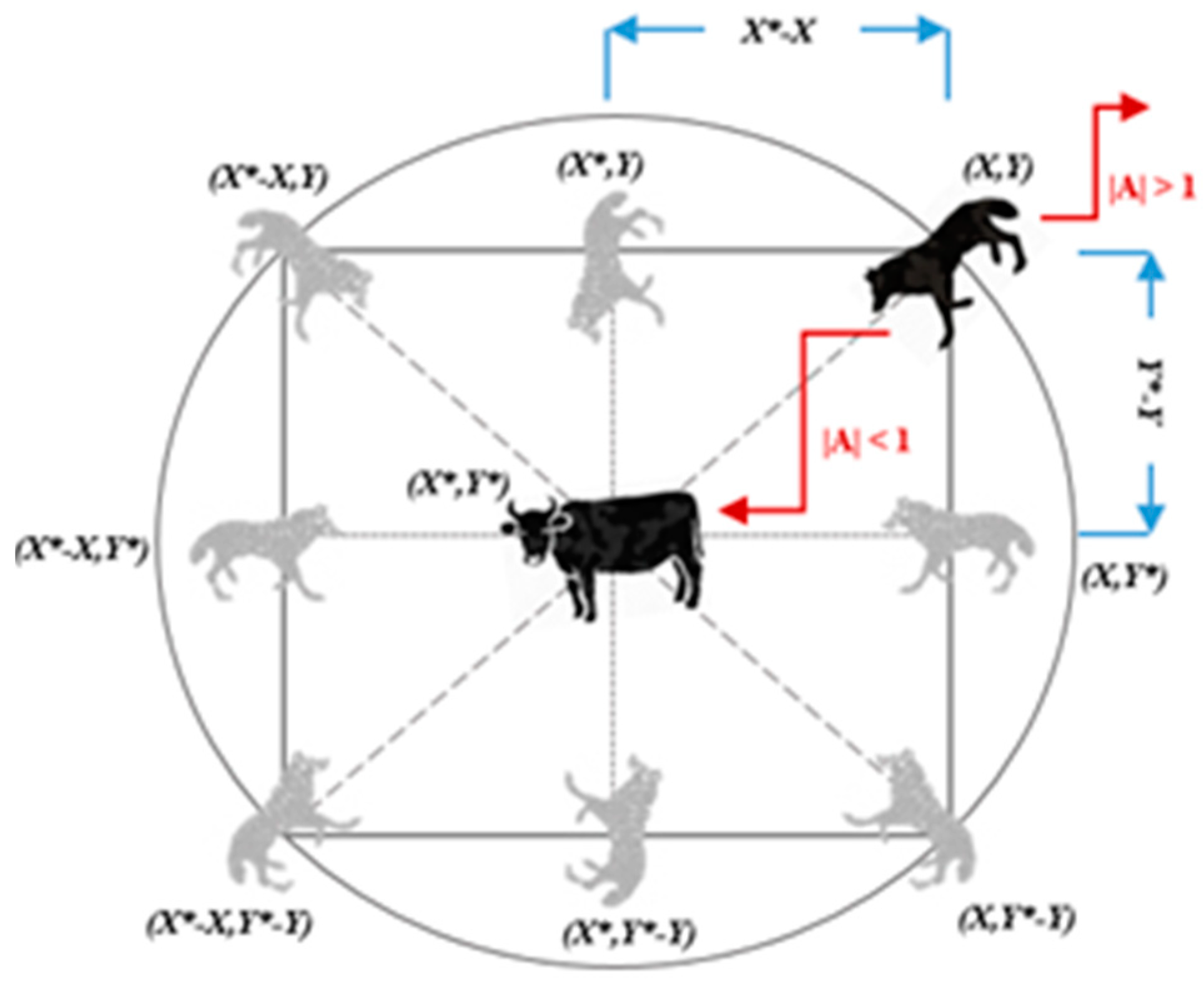
- GWO uses three unique, different solutions with different calculations. These solutions are named with three types of wolves.
2.1. Flower Pollination Algorithm (FPA)
- Cross-pollination is realized via the transfer of pollen between flowers of different plants from the same species. Pollen carriers (pollinators) suit to rules Lèvy distribution (Equation (1)) by jump with far steps or fly. This process is called global pollination;
- Self-pollination occurs due to the pollen transferring within the self of a flower or between different flowers of the same plant. This pollination kind is local pollination;
- The case of flower constancy is the cooperation among pollen carriers with flower types. This is a development within the process of flower pollination;
- Local and global pollination is controlled with a probability value, which is named switch probability and has a value between 0 and 1.
- The global search that solutions are determined by search from more extent area, if is bigger than a randomly generated number;
- The local search process that solutions are searched from a smaller area if this value sp is smaller than the generated random number between 0 and 1 (rand).
2.2. Artificial Bee Colony (ABC) Algorithm
- It is accepted that number of worker and onlooker bees are equal to each other in the total bee population;
- The food sources express candidate solutions and are assumed that each bee completely consumes this source by going to a single food source. Hence, the food source number is half of the total bee number;
- Later, worker bees transform into scout bees to search for the new ones substituted for finished foods.
2.3. Bat Algorithm (BA)
- All bats use audio echo to sense distance;
- Bats move randomly at any location via velocity by using a sound, which has a constant frequency, variable λ wavelength, and loudness with value, to search for the prey. They can adjust the wavelength of emitted pulses or frequency automatically, and the pulse emission rate (r) depending on closeness to its target (r [0, 1]);
- Although loudness value can change in different ways, this value changes between an extremely high (positive) initial value , and a constant minimum value . is 1 due to that bat search its prey with a very loud sound in the beginning; also, when it is considered that bat just found the prey, and abandons to giving out a sound as temporarily, can be taken as 0.
2.4. Jaya Algorithm (JA)
2.5. Gray Wolf Optimization (GWO)
2.6. Harmony Search (HS)
- To play any popular musical piece completely from own memory: usage of harmony memory;
- To play something like to a known work: pitch (tone) adjusting;
- To compose/melodize new or random notes: randomization
- If the HMCR value is bigger than a randomly generated number, memory usage is not possible. In this case, randomly new notes should be generated;
- In the other case, notes recorded in harmony memory can be played from a specific pitch by remembering:
2.7. The Benchmark Truss Structure Problems
3. Numerical Examples
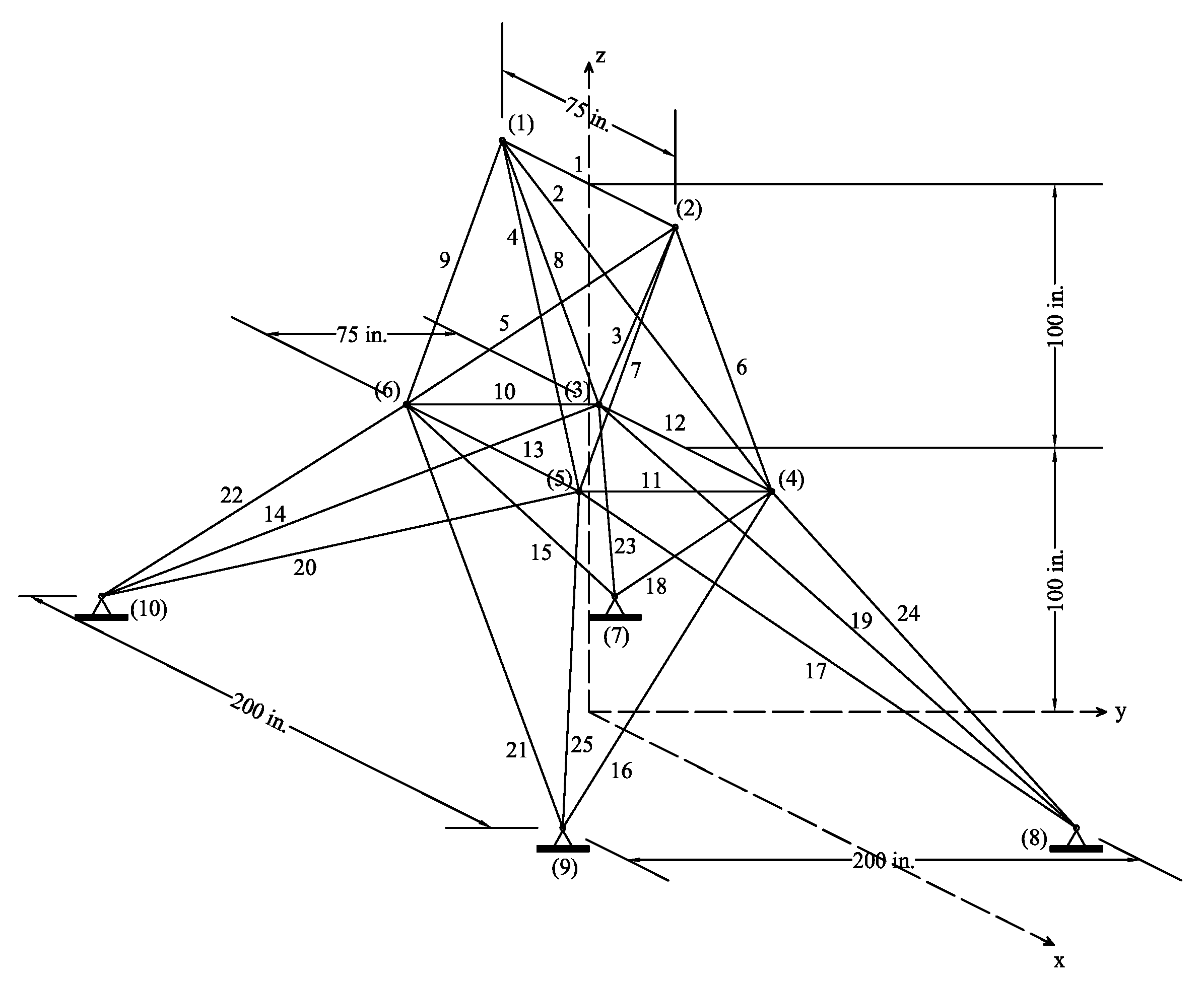
3.1. 25-Bar Truss Optimization with Bar Grouping
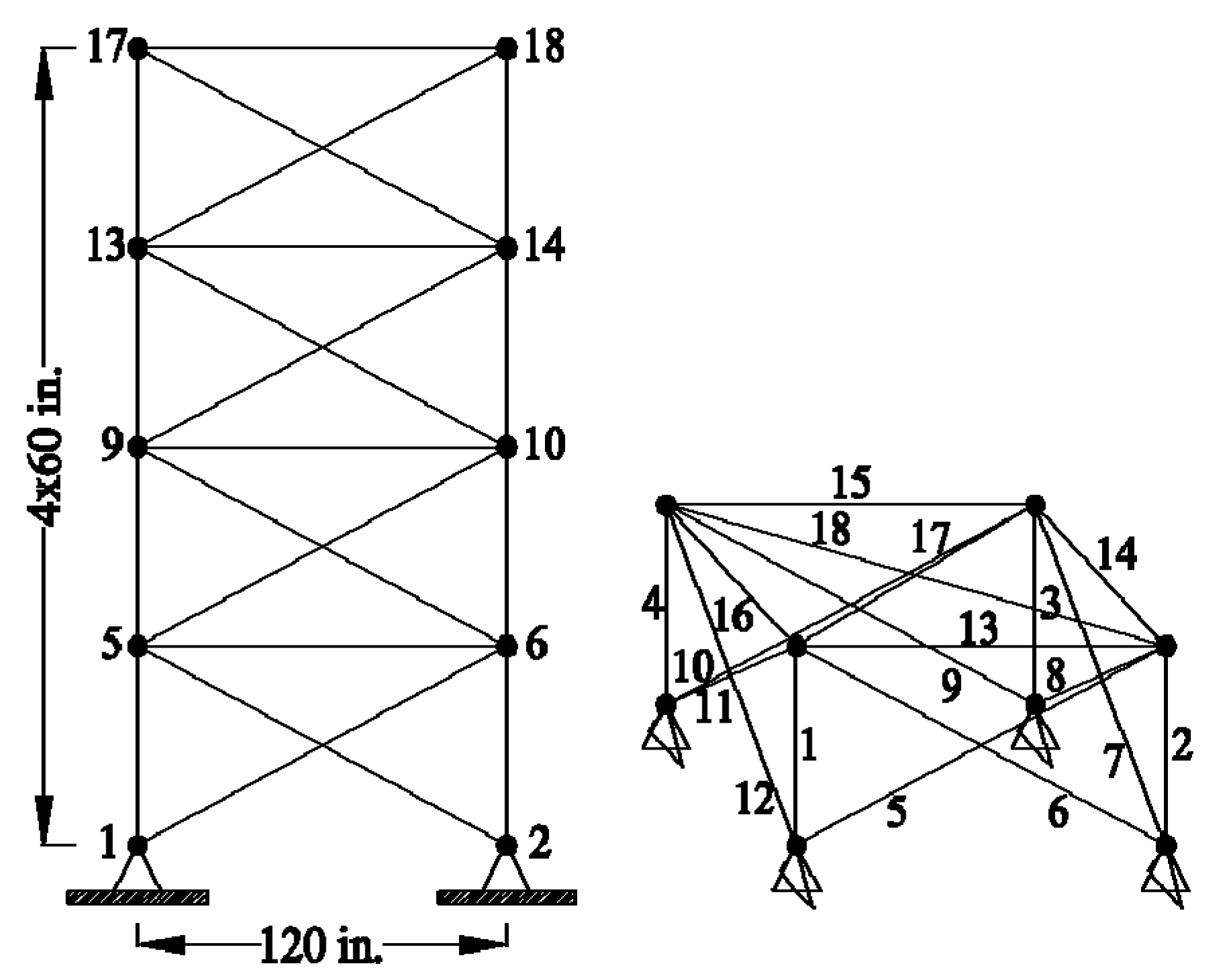
3.2. 72-Bar Truss Optimization with Bar Grouping
3.3. 25-Bar Truss Optimization without Bar Grouping
4. Results
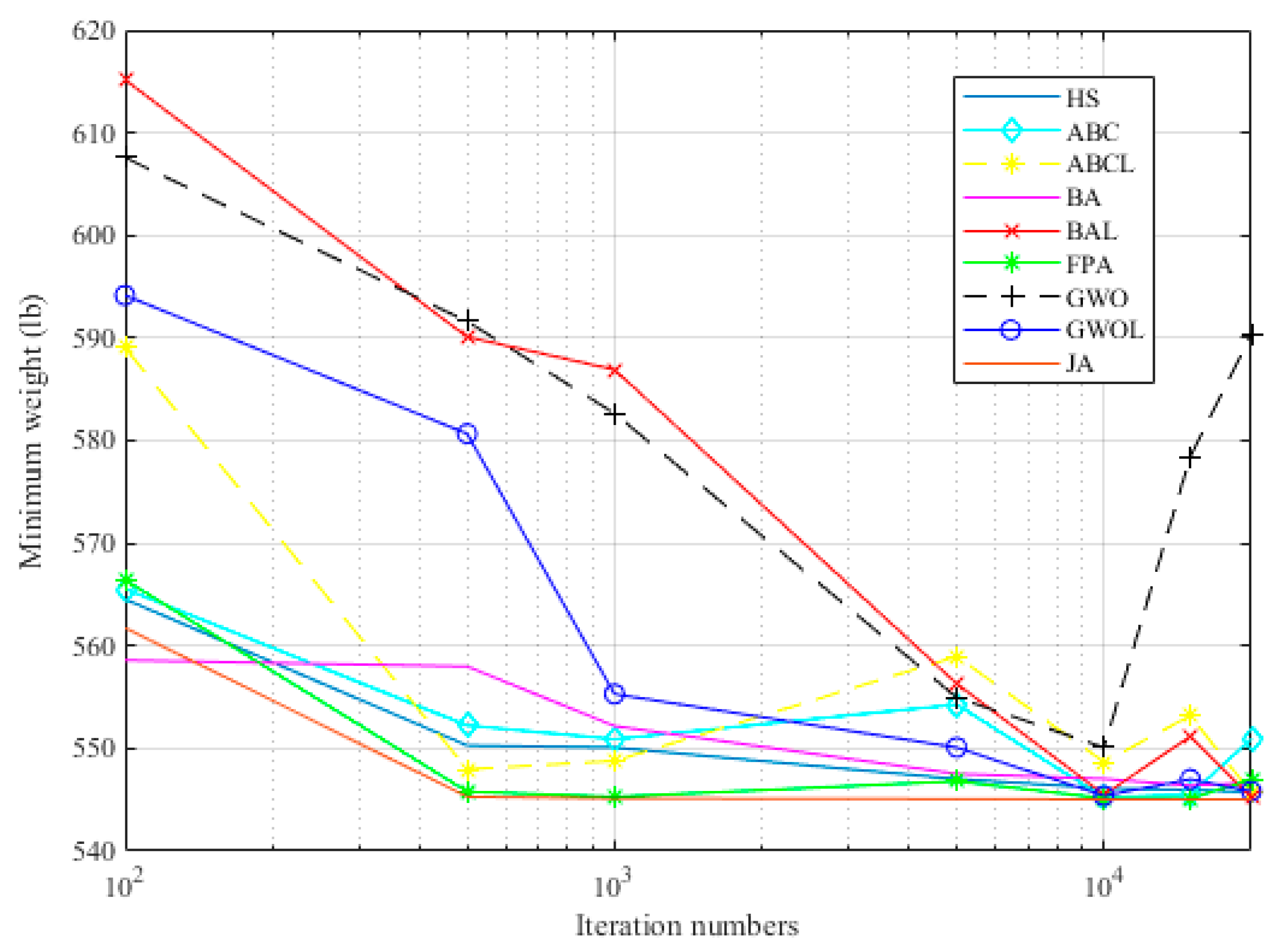
4.1. 25-Bar Truss Optimization with Bar Grouping
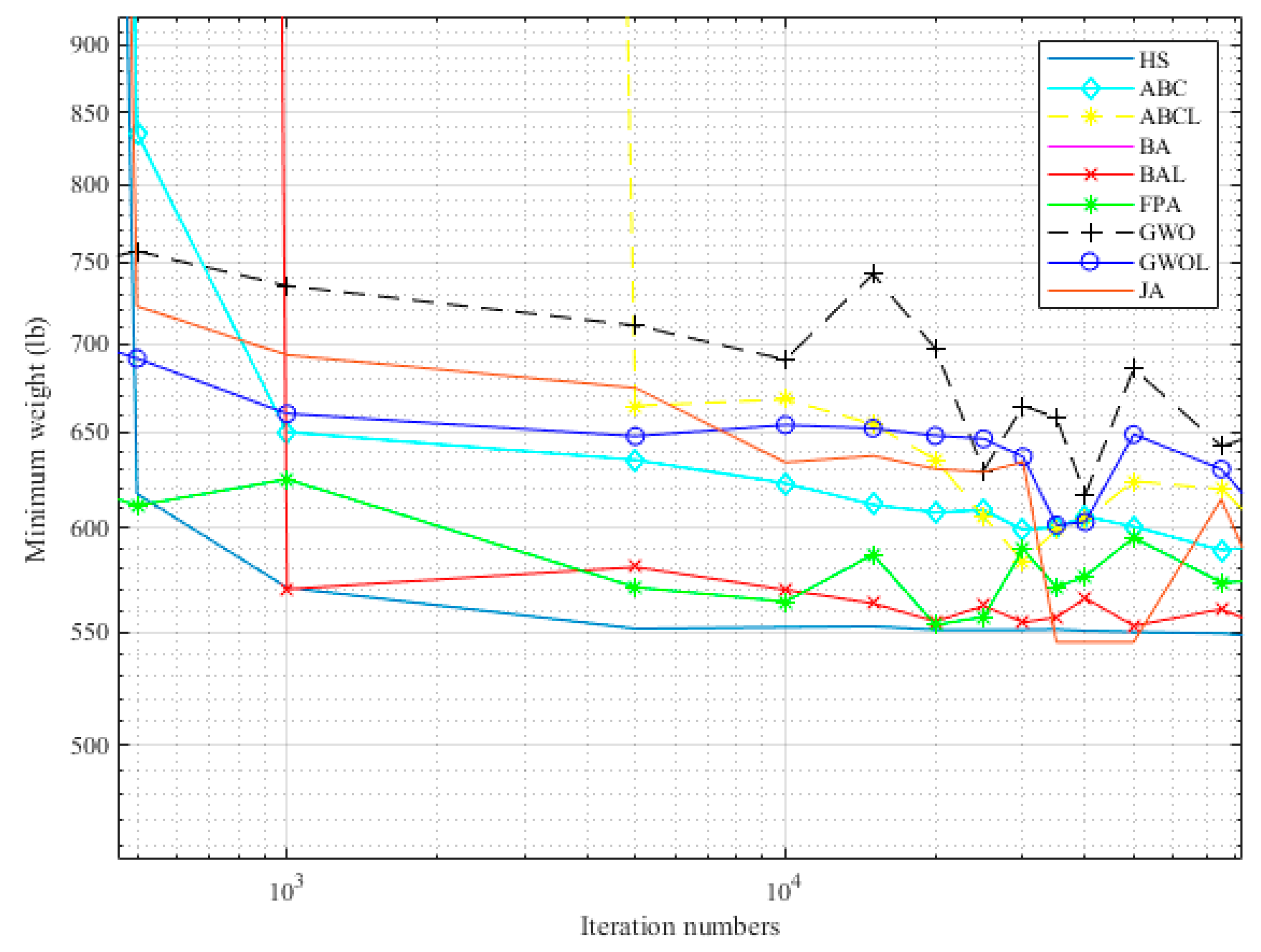
4.2. 72-Bar Truss Optimization with Bar Grouping
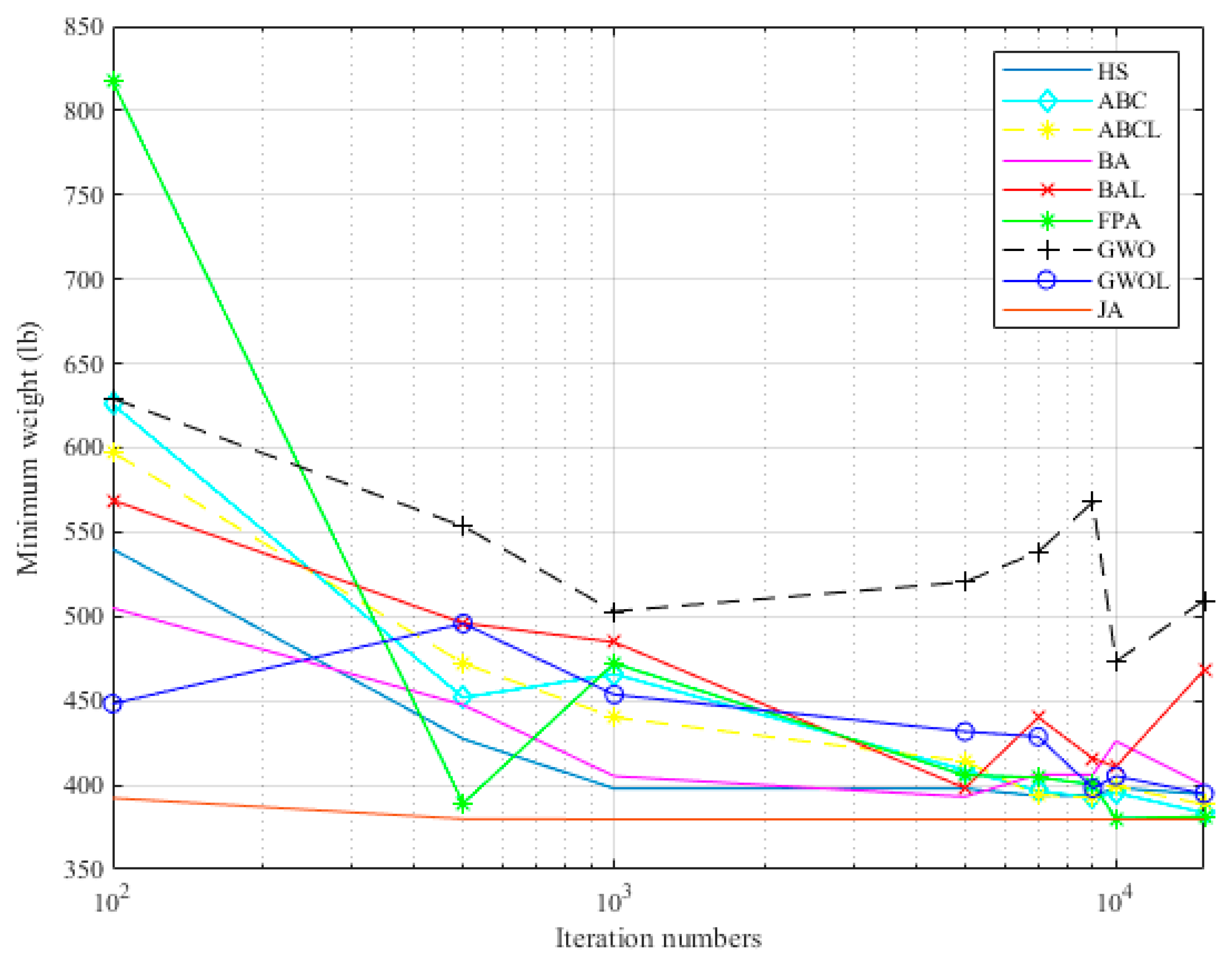
4.3. 25-Bar Truss Optimization without Bar Grouping
5. Conclusions
Author Contributions
Funding
Data Availability Statement
Conflicts of Interest
Appendix A

{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Abbreviation | Explanation |
|---|---|
| New velocity value for ith design variable | |
| Current velocity value of ith design variable within jth candidate solution (bat) | |
| Frequency of jth candidate solution | |
| Mean of sound loudness values belonging all bats | |
| New value, which will be assigned for loudness for ith bat | |
| New value, which will be determined for sound vibration emission rate of bats |
| Notation | Property | Algorithm | |
|---|---|---|---|
| Population Number | HMS | Total harmony number or harmony memory size | HS |
| // | Number of employee bee/onlooker bee/food source number | ABC | |
| Number of total fireflies | FA | ||
| Number of bats | BA | ||
| Total flower number | FPA | ||
| Gray wolf number in the pack | GWO | ||
| Population number | JA | ||
| Characteristic Parameters | PAR | Parameter providing of generating random number depended on music tone, between limits of variable/pitch adjusting rate | HS |
| HMCR | Harmony memory consideration rate | ||
| Parameter, which takes value according to the case that food sources can be optimized | ABC | ||
| SIL | Limit condition, which is considered for which sources must be renewed by scout bees and is assigned at the beginning of the optimization | ||
| Minimum attractiveness value ) | FA | ||
| γ | Light absorption coefficient | ||
| Randomization parameter | |||
| Minimum value of frequency | BA | ||
| Maximum value of frequency | |||
| Loudness of bats during the initial state | |||
| Minimum value of sound loudness | |||
| Sound vibration emission rate of bats in the initial state | |||
| β | Random number, which is determined in the range [−1,1] | ||
| α | Constant coefficient that effective for transmission of loudness | ||
| γ | Constant coefficient that determines of sound vibration emission rate | ||
| Switch probability/search change | FPA | ||
| Coefficient vector | GWO | ||
| Vector determining the case that wolf attacks to prey | |||
| Vector affecting the distance between prey with wolf |
| Expression | Explanation | Algorithm | |
|---|---|---|---|
| Some Solution Values for Design Variables | New value of ith design variable | All | |
| Low limit of ith design variable (minimum value) | HS ABC | ||
| Upper limit of ith design variable (maximum value) | |||
| Initial matrix value of jth candidate solution belonging to ith design variable | All out of HS | ||
| ith design variable value belongs to the solution with the best value in terms of the objective function | All out of HS, ABC, and FA | ||
| ith design variable value belongs to the solution with the worst value in terms of the objective function | JA | ||
| Value of nth solution for ith design variable | FPA HS | ||
| Value of mth solution for ith design variable | FPA | ||
| Value of a specific kth firefly for ith design variable | FA | ||
| Initial matrix value of ith design variable corresponding to pth solution (prey) | GWO | ||
| New value of pth design variable | ABC | ||
| Value (in initial solution matrix) of jth solution for pth design variable | |||
| nth solution value of pth design variable | |||
| Optimization Elements | nth candidate vector selected randomly from the initial matrix | All out of BA, FA, and JA | |
| mth candidate vector selected randomly from the initial matrix | FPA | ||
| Randomly selected parameter as from whole design variables | ABC | ||
| vn | Number of total design variable, which will be optimized | FA, ABC | |
| T | Stage of the current iteration | FA, BA, GWO | |
| stopping criteria | Total iteration number | GWO |
| Name | Task | Algorithm | |
|---|---|---|---|
| Functions | rand | Generation random number between 0 and 1 | All |
| ceil ( ) | Round the number in parentheses to equal/bigger natural number than it | FPA, ABC, HS | |
| min ( ) | Determine the smallest one among value in a certain amount | All out of HS and ABC | |
| max ( ) | Determine the biggest one among value in a certain amount | JA | |
| mean ( ) | Calculate the average of element values in an array | BA | |
| abs ( ) | Absolute of number within the parentheses | JA, GWO | |
| sort ( ) | Queue the members in any array from small to big | GWO | |
| exp ( ) | Give the power of e to the degree of number within parentheses | FPA | |
| sqrt ( ) | Take the square root of a number | FA | |
| sum ( ) | Give the total of element values in any number array | ABC |
References
- Bekdaş, G.; Nigdeli, S.M. Mass ratio factor for optimum tuned mass damper strategies. Int. J. Mech. Sci. 2013, 71, 68–84. [Google Scholar] [CrossRef]
- Parcianello, E.; Chisari, C.; Amadio, C. Optimal design of nonlinear viscous dampers for frame structures. Soil Dyn. Earthq. Eng. 2017, 100, 257–260. [Google Scholar] [CrossRef]
- Talatahari, S.; Gandomi, A.H.; Yang, X.S.; Deb, S. Optimum design of frame structures using the eagle strategy with differential evolution. Eng. Struct. 2015, 91, 16–25. [Google Scholar] [CrossRef]
- Gholizadeh, S.; Ebadijalal, M. Performance based discrete topology optimization of steel braced frames by a new metaheuristic. Adv. Eng. Softw. 2018, 123, 77–92. [Google Scholar] [CrossRef]
- Fathali, M.A.; Rohollah, S.; Vaez, H. Optimum performance-based design of eccentrically braced frames. Eng. Struct. 2020, 202, 109857. [Google Scholar] [CrossRef]
- Kayabekir, A.E.; Bekdaş, G.; Nigdeli, S.M. Metaheuristic Approaches for Optimum Design of Reinforced Concrete Structures: Emerging Research and Opportunities; IGI Global: Hershey, PA, USA, 2020. [Google Scholar]
- Vaez, S.R.H.; Qomi, H.S. Bar layout and weight optimization of special RC shear wall. Structures 2018, 14, 153–163. [Google Scholar] [CrossRef]
- Sheikholeslami, R.; Khalili, B.G.; Sadollah, A.; Kim, J. Optimization of reinforced concrete retaining walls via hybrid firefly algorithm with upper bound strategy. KSCE J. Civ. Eng. 2016, 20, 2428–2438. [Google Scholar] [CrossRef]
- Aydogdu, I. Cost optimization of reinforced concrete cantilever retaining walls under seismic loading using a biogeography-based optimization algorithm with Lèvy flights. Eng. Optim. 2017, 49, 381–400. [Google Scholar] [CrossRef]
- Camp, C.V. Design of space trusses using Big Bang–Big Crunch optimization. J. Struct. Eng. 2007, 133, 999–1008. [Google Scholar] [CrossRef]
- Gomes, H.M. Truss optimization with dynamic constraints using a particle swarm Algorithm. Expert Syst. Appl. 2011, 38, 957–968. [Google Scholar] [CrossRef]
- Miguel, L.F.F.; Miguel, L.F.F. Shape and size optimization of truss structures considering dynamic constraints through modern metaheuristic algorithms. Expert Syst. Appl. 2012, 39, 9458–9467. [Google Scholar] [CrossRef]
- Bekdaş, G.; Nigdeli, S.M.; Yang, X.S. Sizing optimization of truss structures using flower pollination algorithm. Appl. Soft Comput. 2015, 37, 322–331. [Google Scholar] [CrossRef]
- Kaveh, A.; Ghazaan, M.I. Vibrating particles system algorithm for truss optimization with multiple natural frequency constraints. Acta Mech. 2017, 228, 307–322. [Google Scholar] [CrossRef]
- Tejani, G.G.; Pholdee, N.; Bureerat, S.; Prayogo, D. Multiobjective adaptive symbiotic organisms search for truss optimization problems. Knowl. Based Syst. 2018, 161, 398–414. [Google Scholar] [CrossRef]
- Dede, T.; Bekiroğlu, S.; Ayvaz, Y. Weight minimization of trusses with genetic algorithm. Appl. Soft Comput. 2011, 11, 2565–2575. [Google Scholar] [CrossRef]
- Gandomi, A.H.; Alavi, A.H.; Talatahari, S. Structural Optimization Using Krill Herd Algorithm. In Swarm Intelligence and Bio-Inspired Computation; Elsevier: Amsterdam, The Netherlands, 2013; pp. 335–349. [Google Scholar]
- Degertekin, S.O.; Hayalioglu, M.S. Sizing truss structures using teaching-learning-based optimization. Comput. Struct. 2013, 119, 177–188. [Google Scholar] [CrossRef]
- Kaveh, A.; Bakhshpoori, T.; Afshari, E. An efficient hybrid particle swarm and swallow swarm optimization algorithm. Comput. Struct. 2014, 143, 40–59. [Google Scholar] [CrossRef]
- Kaveh, A.; Sheikholeslami, R.; Talatahari, S.; Keshvari-Ilkhichi, M. Chaotic swarming of particles: A new method for size optimization of truss structures. Adv. Eng. Softw. 2014, 67, 136–147. [Google Scholar] [CrossRef]
- Camp, C.V.; Farshchin, M. Design of space trusses using modified teaching–learning based optimization. Eng. Struct. 2014, 62, 87–97. [Google Scholar] [CrossRef]
- Bureerat, S.; Pholdee, N. Optimal truss sizing using an adaptive differential evolution algorithm. J. Comput. Civ. Eng. 2016, 30, 04015019. [Google Scholar] [CrossRef]
- Degertekin, S.O.; Lamberti, L.; Hayalioglu, M.S. Heat transfer search algorithm for sizing optimization of truss structures. Lat. Am. J. Solids Struct. 2017, 14, 373–397. [Google Scholar] [CrossRef]
- Bekdaş, G.; Nigdeli, S.M.; Yang, X.S. Size optimization of truss structures employing flower pollination algorithm without grouping structural members. Int. J. Theor. Appl. Mech. 2017, 1, 269–273. [Google Scholar]
- Yang, X.S. Flower pollination algorithm for global optimization. In International Conference on Unconventional Computing and Natural Computation; Springer: Berlin/Heidelberg, Germany, 2012; pp. 240–249. [Google Scholar]
- Yang, X.S.; Koziel, S.; Leifsson, L. Computational optimization, modelling and simulation: Recent trends and challenges. Procedia Comput. Sci. 2013, 18, 855–860. [Google Scholar] [CrossRef] [Green Version]
- Yang, X.S.; Bekdaş, G.; Nigdeli, S.M. (Eds.) Metaheuristics and Optimization in Civil Engineering; Springer: Cham, Switzerland, 2016; ISBN 9783319262451. [Google Scholar]
- Karaboga, D. An Idea Based on Honey Bee Swarm for Numerical Optimization; Technical Report-tr06; Computer Engineering Department, Engineering Faculty, Erciyes University: Talas, Turkey, 2005; Volume 200, pp. 1–10. [Google Scholar]
- Erdoğmuş, P. Doğadan esinlenen optimizasyon algoritmaları ve optimizasyon algoritmalarının optimizasyonu. Düzce Üniversitesi Bilim Ve Teknol. Derg. 2016, 4, 293–304. [Google Scholar]
- Tapao, A.; Cheerarot, R. Optimal parameters and performance of artificial bee colony algorithm for minimum cost design of reinforced concrete frames. Eng. Struct. 2017, 151, 802–820. [Google Scholar] [CrossRef]
- Yahya, M.; Saka, M.P. Construction site layout planning using multi-objective artificial bee colony algorithm with Lèvy flights. Autom. Constr. 2014, 38, 14–29. [Google Scholar] [CrossRef]
- Karaboga, D.; Basturk, B. A powerful and efficient algorithm for numerical function optimization: Artificial bee colony (ABC) algorithm. J. Glob. Optim. 2007, 39, 459–471. [Google Scholar] [CrossRef]
- Yang, X.S. A New Metaheuristic Bat-Inspired Algorithm; Nature Inspired Cooperative Strategies for Optimization (NICSO 2010); González, J.R., Pelta, D.A., Cruz, C., Terrazas, G., Krasnogor, N., Eds.; Springer: Berlin/Heidelberg, Germany, 2010; ISBN 9783642125386. [Google Scholar]
- Gandomi, A.H.; Yang, X.S.; Talatahari, S.; Alavi, A.H. (Eds.) Metaheuristic Algorithms in Modeling and Optimization. In Metaheuristic Applications in Structures and Infrastructures; Elsevier: Amsterdam, The Netherlands, 2013; pp. 1–24. [Google Scholar]
- Kaveh, A.; Zakian, P. Enhanced bat algorithm for optimal design of skeletal structures. Asian J. Civ. Eng. 2014, 15, 179–212. [Google Scholar]
- Rao, R. Jaya: A simple and new optimization algorithm for solving constrained and unconstrained optimization problems. Int. J. Ind. Eng. Comput. 2016, 7, 19–34. [Google Scholar]
- Mirjalili, S.; Mirjalili, S.M.; Lewis, A. Grey wolf optimizer. Adv. Eng. Softw. 2014, 69, 46–61. [Google Scholar] [CrossRef] [Green Version]
- Doğan, C. Balina Optimizasyon Algoritması ve gri Kurt Optimizasyonu Algoritmaları Kullanılarak yeni Hibrit Optimizasyon Algoritmalarının Geliştirilmesi. Master’s Thesis, T.C. Erciyes University, Kayseri, Turkey, 2019. [Google Scholar]
- Doğan, L. Robot yol Planlaması için gri kurt Optimizasyon Algoritması. Master’s Thesis, Bilecik Şeyh Edebali University, Bilecik, Turkey, 2018. [Google Scholar]
- Faris, H.; Aljarah, I.; Al-Betar, M.A.; Mirjalili, S. Grey wolf optimizer: A review of recent variants and applications. Neural Comput. Appl. 2018, 30, 413–435. [Google Scholar] [CrossRef]
- Şahin, İ.; Dörterler, M.; Gökçe, H. Optimum design of compression spring according to minimum volume using grey wolf optimization method. Gazi J. Eng. Sci. 2017, 3, 21–27. [Google Scholar]
- Geem, Z.W.; Kim, J.H.; Loganathan, G.V. A new heuristic optimization algorithm: Harmony search. Simulation 2001, 76, 60–68. [Google Scholar] [CrossRef]
- Bekdaş, G.; Nigdeli, S.M. Değişik periyotlu yapılar için optimum pasif kütle sönümleyici özelliklerinin belirlenmesi. In 1. Türkiye Deprem Mühendisliği ve Sismoloji Konferansı; 11–14 Ekim; ODTÜ: Ankara, Turkey, 2011; pp. 1–8. [Google Scholar]
- Koziel, S.; Yang, X.S. (Eds.) Computational Optimization, Methods and Algorithms; Springer: Berlin/Heidelberg, Germany, 2011; Volume 356, ISBN 978-3-642-20858-4. [Google Scholar]
- Rao, S.S. Engineering Optimization Theory and Practice, 4th ed.; John Wiley & Sons: Hoboken, NJ, USA, 2009; ISBN 978-0-470-18352-6. [Google Scholar]








| Researchers | Number of Used Classical Algorithms | Number of Hybridized/ Modified Algorithms | Algorithm | Number of Investigated Truss Models | Number of Maximum Design Variables | Biggest Number of Compared Other Methods | Citation |
|---|---|---|---|---|---|---|---|
| Camp (2007) | 1 | - | Big bang–big crunch (BB–BC) optimization | 3 | 16 | 4 | [10] |
| Dede et al. (2011) | 1 | - | Genetic algorithm (GA) | 4 | 96 | 13 | [16] |
| Gandomi et al. (2013) | 1 | - | Krill herd (KH) | 1 | 8 | 10 | [17] |
| Degertekin and Hayalioglu (2013) | 1 | - | Teaching-learning based optimization (TLBO) | 4 | 29 | 8 | [18] |
| Kaveh et al. (2014) | - | 1 | Hybrid particle swarm and swallow swarm optimization (HPSSO) | 6 | 29 | 6 | [19] |
| Kaveh et al. (2014b) | - | 1 | Chaotic swarming of particles (CSP) | 4 | 59 | 5 | [20] |
| Camp and Farschin (2014) | - | 1 | Modified teaching-learning based optimization (TLBO) | 3 | 26 | 7 | [21] |
| Bureerat and Pholde (2016) | - | 1 | Adaptive Differential evolution algorithm (ADEA) | 4 | 29 | 6 | [22] |
| Degertekin et al. (2017) | 1 | - | Heat transfer search (HTS) | 3 | 29 | 8 | [23] |
| Bekdaş et al. (2017) | 1 | - | Flower pollination algorithm (FPA) | 2 | 72 | 0 | [24] |
| Present Study | 6 | 3 | Defined in Section 2 | 3 | 25 | 7 | - |
| Definition | Symbol | Limit/Value | Unit | Truss Model | |
|---|---|---|---|---|---|
| Design Variables | Cross-section of truss bars | Abar | 0.01–3.4 0.1–3.0 | inch2 | 25-Bar 72-Bar |
| Design Constants | Elasticity modulus | Es | 107 | psi | Both |
| Weight per unit of volume of bars | ρs | 0.1 | lb/inch3 | ||
| Bar number | - | 25 72 | - | 25-Bar 72-Bar | |
| Node number | - | 10 20 | - | 25-Bar 72-Bar | |
| Bar group number | - | 8 16 | - | 25-Bar 72-Bar |
| Case | Node Number | Load | Unit | ||
|---|---|---|---|---|---|
| Px | Py | Pz | |||
| 1 | 1 | 1000 | 10,000 | −5000 | lb/inch2 |
| 2 | 0 | 10,000 | −5000 | ||
| 3 | 500 | 0 | 0 | ||
| 6 | 500 | 0 | 0 | ||
| 2 | 1 | 0 | 20,000 | −5000 | |
| 2 | 0 | −20,000 | −5000 | ||
| Case | Node Number | Load | Unit | ||
|---|---|---|---|---|---|
| Px | Py | Pz | |||
| 1 | 17 | 5000 | 5000 | −5000 | lb/inch2 |
| 2 | 17 | 0 | 0 | −5000 | |
| 18 | 0 | 0 | −5000 | ||
| 19 | 0 | 0 | −5000 | ||
| 20 | 0 | 0 | −5000 | ||
| Structural Member | Description | Constraints | Unit | ||
|---|---|---|---|---|---|
| Nodes | Displacement | ||||
| All | Limitation of Displacements Occurred on Nodes | inch | |||
| Group Number | Design Variables | Compression Stress | Tension Stress | ||
| 1 | A1 | Limitation required for stresses occurred on bars | psi | ||
| 2 | A2–5 | ||||
| 3 | A6–9 | ||||
| 4 | A10–11 | ||||
| 5 | A12–13 | ||||
| 6 | A14–17 | ||||
| 7 | A18–21 | ||||
| 8 | A22–25 | ||||
| Structural Member | Description | Constraints | Unit | ||
|---|---|---|---|---|---|
| Nodes | Displacement | ||||
| All | Limitation of Displacements Occurred on Nodes | inch | |||
| Group Number | Design Variables | Compression Stress | Tension Stress | ||
| 1 | A1–4 | Limitation required for stresses occurred on bars | psi | ||
| 2 | A5–12 | ||||
| 3 | A13–16 | ||||
| 4 | A17–18 | ||||
| 5 | A19–22 | ||||
| 6 | A23–30 | ||||
| 7 | A31–34 | ||||
| 8 | A35–36 | ||||
| 9 | A37–40 | ||||
| 10 | A41–48 | ||||
| 11 | A49–52 | ||||
| 12 | A53–54 | ||||
| 13 | A55–58 | ||||
| 14 | A59–66 | ||||
| 15 | A67–70 | ||||
| 16 | A71–72 | ||||
| Group Number | Design Variables | Previous Studies | ||||||
|---|---|---|---|---|---|---|---|---|
| KH [17] | TLBO [18] | HPSSO [19] | CSP [20] | TLBO [21] | ADEA [22] | HTS [23] | ||
| 1 | A1 | 0.01025 | 0.0100 | 0.0100 | 0.010 | 0.0100 | 0.0100 | 0.010000 |
| 2 | A2–5 | 2.02437 | 2.0712 | 1.9907 | 1.910 | 1.9878 | 5.6406 | 2.070200 |
| 3 | A6–9 | 3.04154 | 2.9570 | 2.9881 | 2.798 | 2.9914 | 8.5941 | 2.970031 |
| 4 | A10–11 | 0.01029 | 0.0100 | 0.0100 | 0.010 | 0.0102 | 0.0100 | 0.010000 |
| 5 | A12–13 | 0.01081 | 0.0100 | 0.0100 | 0.010 | 0.0100 | 0.0100 | 0.010000 |
| 6 | A14–17 | 0.68950 | 0.6891 | 0.6824 | 0.708 | 0.6828 | 1.9368 | 0.670790 |
| 7 | A18–21 | 1.62002 | 1.6209 | 1.6764 | 1.836 | 1.6775 | 4.7857 | 1.617120 |
| 8 | A22–25 | 2.65501 | 2.6768 | 2.6656 | 2.645 | 2.6640 | 7.5921 | 2.698100 |
| Best weight | 545.175 | 545.09 | 545.164 | 545.09 | 545.175 | 545.1657 | 545.13 | |
| Mean weight | 545.483 | 545.41 | 545.556 | 545.20 | 545.483 | 545.2200 | 545.47 | |
| Standard deviation | 0.306 | 0.42 | 0.432 | 0.487 | 0.306 | 0.0730 | 0.476 | |
| Population number | - | 30 | - | 50 | - | - | - | |
| Iteration number | - | - | - | 350 | - | - | - | |
| Total analysis number | 12,199 | 15,318 | 13,326 | 17,500 | 12,199 | 10,000 | 7653 | |
| Group Number | Design Variables | Current Study | ||||||||
|---|---|---|---|---|---|---|---|---|---|---|
| HS | ABC | ABCL | BA | BAL | FPA | GWO | GWOL | JA | ||
| 1 | A1 | 0.0100 | 0.0115 | 0.0100 | 0.0100 | 0.0100 | 0.0100 | 0.0229 | 0.0108 | 0.0100 |
| 2 | A2–5 | 2.1375 | 1.9193 | 2.1071 | 1.9694 | 1.9774 | 2.0491 | 1.9229 | 2.0044 | 2.0420 |
| 3 | A6–9 | 2.8910 | 3.1549 | 2.9346 | 3.1356 | 3.0507 | 3.0341 | 3.0712 | 3.0422 | 3.0045 |
| 4 | A10–11 | 0.0100 | 0.0100 | 0.0100 | 0.0100 | 0.0100 | 0.0101 | 0.0100 | 0.0104 | 0.0100 |
| 5 | A12–13 | 0.0100 | 0.0102 | 0.0103 | 0.0100 | 0.0102 | 0.0100 | 0.2285 | 0.0142 | 0.0100 |
| 6 | A14–17 | 0.6887 | 0.6749 | 0.6415 | 0.6808 | 0.6923 | 0.6770 | 0.6142 | 0.6817 | 0.6816 |
| 7 | A18–21 | 1.5994 | 1.6627 | 1.6051 | 1.6258 | 1.6566 | 1.6035 | 1.7070 | 1.6375 | 1.6229 |
| 8 | A22–25 | 2.6991 | 2.6352 | 2.7508 | 2.6432 | 2.6412 | 2.6764 | 2.7241 | 2.6607 | 2.6737 |
| Best weight | 545.3419 | 545.4145 | 545.3736 | 545.3712 | 545.1191 | 545.0738 | 548.9530 | 545.1282 | 545.0378 | |
| Mean weight | 548.3861 | 545.5653 | 545.4441 | 549.9517 | 546.4605 | 545.0738 | 548.9533 | 545.1287 | 545.0440 | |
| Standard deviation | 1.160 | 0.104 | 0.108 | 1.940 | 5.560 | 2.10 × 10−13 | 6.36 × 10−5 | 1.88 × 10−4 | 3.03 × 10−3 | |
| Best population number | 30 | 25 | 30 | 25 | 20 | 25 | 20 | 20 | 20 | |
| Best iteration number | 18,000 | 13,000 | 5000 | 12,500 | 10,000 | 2500 | 11,000 | 11,500 | 15,000 | |
| Group Number | Design Variables | Current Study | ||||||||
|---|---|---|---|---|---|---|---|---|---|---|
| HS | ABC | ABCL | BA | BAL | FPA | GWO | GWOL | JA | ||
| 1 | A1–4 | 2.2301 | 2.0781 | 1.7910 | 1.7682 | 2.0679 | 1.9057 | 1.7845 | 2.0458 | 1.8899 |
| 2 | A5–12 | 0.4946 | 0.5187 | 0.5195 | 0.5720 | 0.4854 | 0.4916 | 0.5249 | 0.4864 | 0.5119 |
| 3 | A13–16 | 0.1000 | 0.1026 | 0.1000 | 0.1000 | 0.1000 | 0.1000 | 0.1000 | 0.1137 | 0.1000 |
| 4 | A17–18 | 0.1212 | 0.1000 | 0.1000 | 0.1384 | 0.1000 | 0.1003 | 0.1000 | 0.1003 | 0.1000 |
| 5 | A19–22 | 1.1985 | 1.2594 | 1.3484 | 1.3535 | 1.3457 | 1.3372 | 1.0110 | 1.1140 | 1.2702 |
| 6 | A23–30 | 0.5009 | 0.4559 | 0.4860 | 0.5347 | 0.5319 | 0.4907 | 0.6469 | 0.5504 | 0.5120 |
| 7 | A31–34 | 0.1000 | 0.1001 | 0.1000 | 0.1000 | 0.1181 | 0.1000 | 0.1000 | 0.1161 | 0.1000 |
| 8 | A35–36 | 0.1000 | 0.1000 | 0.1023 | 0.1000 | 0.1003 | 0.1000 | 0.1000 | 0.1063 | 0.1000 |
| 9 | A37–40 | 0.5477 | 0.6239 | 0.5061 | 0.6166 | 0.4839 | 0.5590 | 0.6409 | 0.5198 | 0.5234 |
| 10 | A41–48 | 0.5334 | 0.4710 | 0.5002 | 0.4921 | 0.5194 | 0.5088 | 0.5318 | 0.4672 | 0.5165 |
| 11 | A49–52 | 0.1032 | 0.1000 | 0.1000 | 0.1000 | 0.1005 | 0.1000 | 0.1000 | 0.1683 | 0.1000 |
| 12 | A53–54 | 0.1000 | 0.1000 | 0.1000 | 0.1567 | 0.1420 | 0.1000 | 0.3552 | 0.1000 | 0.1000 |
| 13 | A55–58 | 0.1626 | 0.1570 | 0.1558 | 0.1644 | 0.1562 | 0.1560 | 0.1502 | 0.1516 | 0.1565 |
| 14 | A59–66 | 0.5040 | 0.6202 | 0.5634 | 0.5031 | 0.5214 | 0.5373 | 0.4666 | 0.5651 | 0.5457 |
| 15 | A67–70 | 0.3831 | 0.3898 | 0.5024 | 0.3699 | 0.3972 | 0.4890 | 0.2846 | 0.3832 | 0.4104 |
| 16 | A71–72 | 0.7333 | 0.5725 | 0.5738 | 0.6129 | 0.5235 | 0.5802 | 0.9665 | 0.7247 | 0.5678 |
| Best weight | 386.2662 | 383.4078 | 381.5569 | 385.6475 | 381.9249 | 380.4598 | 398.7166 | 386.5409 | 379.6156 | |
| Mean weight | 405.3741 | 402.1776 | 395.4222 | 417.7893 | 382.0331 | 380.4598 | 398.7167 | 386.5411 | 379.6172 | |
| Standard deviation | 5.820 | 16.100 | 8.710 | 48.700 | 0.220 | 2.79 × 10−13 | 5.77 × 10−5 | 3.65 × 10−5 | 7.49 × 10−4 | |
| Best Population number | 25 | 30 | 30 | 15 | 10 | 25 | 15 | 30 | 30 | |
| Best iteration number | 13,000 | 14,500 | 19,000 | 20,000 | 17,500 | 18,000 | 8500 | 19,500 | 17,500 | |
| Group Number | Design Variables | Previous Studies | ||||||
|---|---|---|---|---|---|---|---|---|
| BB-BC [10] | GA [16] | TLBO [18] | CSP [20] | TLBO [21] | ADEA [22] | HTS [23] | ||
| 1 | A1–4 | 1.8577 | 1.702 | 1.90640 | 1.94459 | 1.8807 | 1.8861 | 1.9001 |
| 2 | A5–12 | 0.5059 | 0.496 | 0.50612 | 0.50260 | 0.5142 | 0.5231 | 0.5131 |
| 3 | A13–16 | 0.1000 | 0.100 | 0.10000 | 0.10000 | 0.1000 | 0.1000 | 0.1000 |
| 4 | A17–18 | 0.1000 | 0.100 | 0.10000 | 0.10000 | 0.1000 | 0.1000 | 0.1000 |
| 5 | A19–22 | 1.2476 | 1.288 | 1.26170 | 1.26757 | 1.2711 | 1.2576 | 1.2456 |
| 6 | A23–30 | 0.5269 | 0.469 | 0.51110 | 0.50990 | 0.5151 | 0.5043 | 0.5080 |
| 7 | A31–34 | 0.1000 | 0.100 | 0.10000 | 0.10000 | 0.1000 | 0.1000 | 0.1000 |
| 8 | A35–36 | 0.1012 | 0.100 | 0.10000 | 0.10000 | 0.1000 | 0.1000 | 0.1000 |
| 9 | A37–40 | 0.5209 | 0.505 | 0.53170 | 0.50674 | 0.5317 | 0.5200 | 0.5550 |
| 10 | A41–48 | 0.5172 | 0.550 | 0.51591 | 0.51651 | 0.5134 | 0.5235 | 0.5227 |
| 11 | A49–52 | 0.1004 | 0.109 | 0.10000 | 0.10752 | 0.1000 | 0.1000 | 0.1000 |
| 12 | A53–54 | 0.1005 | 0.118 | 0.10000 | 0.10000 | 0.1000 | 0.1000 | 0.1000 |
| 13 | A55–58 | 0.1565 | 0.154 | 0.15620 | 0.15618 | 0.1565 | 0.1568 | 0.1566 |
| 14 | A59–66 | 0.5507 | 0.604 | 0.54927 | 0.54022 | 0.5429 | 0.5394 | 0.5407 |
| 15 | A67–70 | 0.3922 | 0.442 | 0.40966 | 0.42229 | 0.4081 | 0.4083 | 0.4084 |
| 16 | A71–72 | 0.5922 | 0.604 | 0.56976 | 0.57941 | 0.5733 | 0.5734 | 0.5669 |
| Best weight | 379.85 | 379.63 | 379.63 | 379.97 | 379.632 | 379.6943 | 379.73 | |
| Mean weight | 382.08 | - | - | 381.56 | 379.759 | 379.8961 | 382.26 | |
| Standard deviation | 1.912 | - | - | 1.803 | 0.149 | 0.0791 | 1.940 | |
| Population number | - | - | - | - | - | - | - | |
| Iteration number | - | - | - | - | - | - | - | |
| Total analysis number | 6942 | 19,709 | 19,709 | 10,500 | 21,542 | 15,600 | 13,166 | |
| Design Variables | Documented Study [24] | Current Study | ||||||||
|---|---|---|---|---|---|---|---|---|---|---|
| FPA | HS | ABC | ABCL | BA | BAL | FPA | GWO | GWOL | JA | |
| A1 | 0.0100 | 0.4458 | 0.1298 | 0.0104 | 0.1184 | 0.0100 | 0.0965 | 0.7796 | 0.0103 | 0.0100 |
| A2 | 2.3903 | 3.1494 | 2.2184 | 3.4000 | 2.0174 | 2.6515 | 1.4802 | 1.2254 | 1.9548 | 1.9019 |
| A3 | 1.8524 | 2.0411 | 1.9449 | 1.4015 | 2.2780 | 1.6965 | 2.9122 | 2.2786 | 1.2900 | 2.4622 |
| A4 | 2.0935 | 2.1586 | 2.0351 | 3.3351 | 1.8349 | 2.5179 | 1.2167 | 2.8893 | 2.5339 | 1.6803 |
| A5 | 1.9749 | 2.1175 | 1.9137 | 0.7374 | 2.4292 | 1.5376 | 2.9552 | 1.6550 | 2.5293 | 2.4353 |
| A6 | 2.9549 | 2.7672 | 2.4382 | 3.4000 | 2.8319 | 3.3445 | 2.3174 | 2.5574 | 2.8853 | 2.7733 |
| A7 | 2.9379 | 2.7920 | 2.7738 | 2.9510 | 3.0574 | 3.2573 | 2.6665 | 2.7372 | 2.6204 | 2.7611 |
| A8 | 3.0085 | 2.8634 | 3.0920 | 2.4397 | 3.1506 | 2.8895 | 3.2496 | 3.0388 | 2.7839 | 3.4000 |
| A9 | 2.4974 | 2.8615 | 1.9781 | 2.3134 | 2.9135 | 2.1074 | 3.2680 | 2.9789 | 2.0761 | 2.8591 |
| A10 | 0.0100 | 0.1332 | 0.1210 | 0.2810 | 0.1278 | 0.1041 | 0.0100 | 0.6568 | 0.0159 | 0.0100 |
| A11 | 0.0104 | 1.6132 | 0.3037 | 0.0100 | 0.0860 | 0.0294 | 0.0100 | 0.4757 | 0.0756 | 0.0100 |
| A12 | 0.0100 | 0.4209 | 0.0157 | 0.0196 | 0.0100 | 0.0107 | 0.1100 | 0.8414 | 0.0115 | 0.0100 |
| A13 | 0.0100 | 0.3124 | 0.3610 | 0.0100 | 0.0100 | 0.0132 | 0.0100 | 0.3416 | 0.0154 | 0.0100 |
| A14 | 0.7058 | 1.2763 | 1.3285 | 0.5596 | 0.7848 | 0.5993 | 0.8670 | 0.9344 | 0.9142 | 0.8295 |
| A15 | 0.5950 | 0.4679 | 0.3222 | 0.6389 | 0.7687 | 0.6265 | 0.7245 | 0.8662 | 0.4807 | 0.6832 |
| A16 | 0.8043 | 1.5477 | 1.1122 | 0.8279 | 0.6498 | 0.7242 | 0.6477 | 1.6382 | 1.3634 | 0.6205 |
| A17 | 0.6149 | 0.1954 | 0.6027 | 0.5991 | 0.6166 | 0.7340 | 0.4533 | 0.4981 | 0.5772 | 0.5581 |
| A18 | 1.7011 | 1.7648 | 1.8217 | 2.6633 | 1.6228 | 1.7418 | 1.2780 | 2.1802 | 2.4427 | 1.4748 |
| A19 | 1.7259 | 1.0280 | 2.0910 | 1.2955 | 1.8506 | 1.7004 | 1.8226 | 2.2122 | 2.2463 | 1.8439 |
| A20 | 1.8375 | 2.1691 | 2.1350 | 2.4677 | 1.4679 | 1.7927 | 1.4716 | 2.0611 | 2.0330 | 1.5456 |
| A21 | 1.3793 | 1.5454 | 1.7626 | 0.8297 | 1.4096 | 1.3135 | 2.0145 | 2.0826 | 2.2709 | 1.4880 |
| A22 | 2.3446 | 2.0615 | 3.0436 | 2.2567 | 2.3569 | 2.1048 | 3.1522 | 3.0129 | 1.7381 | 2.9342 |
| A23 | 2.5744 | 2.0553 | 3.0927 | 2.1876 | 3.0532 | 2.6214 | 3.2085 | 3.0249 | 2.6066 | 3.0578 |
| A24 | 3.1464 | 3.3649 | 3.0028 | 3.4000 | 3.0771 | 3.2652 | 2.5699 | 1.7545 | 3.0829 | 2.6271 |
| A25 | 2.5920 | 2.9254 | 2.0149 | 3.4000 | 2.1005 | 2.7427 | 1.8336 | 1.9041 | 2.7111 | 2.0332 |
| Best weight | 543.20 | 585.9394 | 573.9692 | 565.9572 | 549.4372 | 545.2959 | 548.1256 | 604.4136 | 578.7288 | 542.9822 |
| Mean weight | - | 603.0324 | 599.9786 | 566.0596 | 551.1452 | 552.0253 | 548.1256 | 604.4137 | 578.7288 | 543.0017 |
| Standard deviation | - | 16.400 | 17.400 | 0.165 | 1.180 | 34.400 | 1.18 × 10−13 | 9.04 × 10−6 | 1.79 × 10−6 | 8.22 × 10−3 |
| Best population number | 20 | 15 | 30 | 15 | 25 | 30 | 25 | 10 | 30 | 15 |
| Best iteration number | 100,000 | 95,000 | 115,000 | 35,000 | 30,000 | 110,000 | 55,000 | 120,000 | 90,000 | 115,000 |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2021 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Bekdaş, G.; Yucel, M.; Nigdeli, S.M. Evaluation of Metaheuristic-Based Methods for Optimization of Truss Structures via Various Algorithms and Lèvy Flight Modification. Buildings 2021, 11, 49. https://doi.org/10.3390/buildings11020049
Bekdaş G, Yucel M, Nigdeli SM. Evaluation of Metaheuristic-Based Methods for Optimization of Truss Structures via Various Algorithms and Lèvy Flight Modification. Buildings. 2021; 11(2):49. https://doi.org/10.3390/buildings11020049
Chicago/Turabian StyleBekdaş, Gebrail, Melda Yucel, and Sinan Melih Nigdeli. 2021. "Evaluation of Metaheuristic-Based Methods for Optimization of Truss Structures via Various Algorithms and Lèvy Flight Modification" Buildings 11, no. 2: 49. https://doi.org/10.3390/buildings11020049
APA StyleBekdaş, G., Yucel, M., & Nigdeli, S. M. (2021). Evaluation of Metaheuristic-Based Methods for Optimization of Truss Structures via Various Algorithms and Lèvy Flight Modification. Buildings, 11(2), 49. https://doi.org/10.3390/buildings11020049